
Robust Object Segmentation using Active Contours and Shape Prior
Mohamed Amine Mezghich, Malek Sellami, Slim M’Hiri and Fouzi Ghorbel
GRIFT Research Group, CRISTAL Laboratory, National School of Computer Sciences,
University of Manouba 2010, Manouba, Tunisia
Keywords:
Active Contours, Shape Prior, Phase Correlation, Rigid Transformation.
Abstract:
In this paper, we intend to present new method to incorporate geometric shape prior into region-based active
contours in order to improve its robustness to noise and occlusions. The proposed shape prior is defined after
the registration of binary images associated with level set functions of the active contour and a reference shape.
The used registration method is based on phase correlation. This representation makes it possible to manage
several objects simultaneously. Experimental results show the ability of the proposed geometric shape prior to
constrain an evolving curve towards a target shape. We highlight, on synthetic and real images, the benefit of
the method on segmentation results in presence of partial occlusions, low contrast and noise.
1 INTRODUCTION
Active contour models have been introduced in 1988
(Kass et al., 1988). The principle of these methods
is to move a curve iteratively minimizing energy’s
functional. The minimum is reached at object bound-
aries. Active contour methods can be classified into
two families : parametric and geometric active con-
tours. The first family, called also Snakes, uses an
explicit representation of the contours and depends
only on image gradient to detect objects (Kass et al.,
1988; Cohen, 1991). Theses models are able to seg-
ment only one object in the image. To overcome this
problem, an implicit representation of the active con-
tours via level set approach (i.e. geometric active
contours) has been used (Osher and Sethian, 1988)
to handle topological changes of the front. A num-
ber of active contour models based on level set theory
has been then proposed which can be divided into two
categories : The boundary-based approach which de-
pends on an edge stopping function to detect objects
(Malladi et al., 1995; Caselles et al., 1997) and the
region-based approach which is based on minimizing
an energy’s functional to segment objects in the im-
age (Chan and Vese, 2001). Experiments show that
region-based models can detect objects with smooth
boundaries and noise since the whole region is ex-
plored. However, there is still no way to characterize
the global shape of an object. Especially in presence
of occlusions and clutter, all the previous models con-
verge to the wrong contours. To solve the above men-
tioned problems, different attempts include shape
prior into the active contour model. Many works have
been proposed which can be classified into statistical
or geometrical shape priors. A statistical shape model
(Leventon et al., 2000) was associated to the geodesic
active contours (Caselles et al., 1997). A set of train-
ing shapes is used to define a Gaussian distribution
over shapes. At each step of the surface evolution,
the maximum a posteriori (MAP) position and shape
are estimated and used to move globally the surface
while local evolution is based on image gradient and
curvature. A new energy’s functional based on the
quadratic distance between the evolving curve and the
average shape of the target object after alignment was
defined by (Chen et al., 2001). This term is then in-
corporated into the geodesic active contours. In 2007,
(Fang and Chan, 2007) introduced a statistical shape
prior into the geodesic active contour to detect par-
tially occluded object. PCA is computed on level set
functions used as training data and the set of points
in subspace is approximated by a Gaussian function
to construct the shape prior model. An additional ge-
ometric shape prior into region-based active contours
was introduced by (Foulonneau et al., 2004). Prior
knowledge is defined as a distance between shape de-
scriptors based on the Legendre moments of the char-
acteristic function. A new geometric shape prior for
a region-based active contours (Chan and Vese, 2001)
was defined by (Charmi et al., 2010) after alignment
of the evolving contour and the reference shape. The
model has been successful in case of single object in
547
Amine Mezghich M., Sellami M., M’hiri S. and Ghorbel F. (2013).
Robust Object Segmentation using Active Contours and Shape Prior.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 547-553
DOI: 10.5220/0004263005470553
Copyright
c
SciTePress

the image. It is well known that the level set approach
solves the problem of topology changing of the para-
metric Snake. However, the introduction of shape
prior by the aforementioned models does to segment
a single object in the image. In this paper we focus on
adding shape prior to Chan and Vese’s model (Chan
and Vese, 2001) based on registration by phase corre-
lation of binary images associated with level set func-
tions of the evolving contour and the shape of ref-
erence. The improved model can retain all the ad-
vantages of (Chan and Vese, 2001) and have the ad-
ditional ability of being able to handle images with
multiple objects in presence of noise and partial oc-
clusions. The remainder of this paper is organized as
follows : In Section 2, we recall the principle of Chan
and Vese’s model. The proposed shape prior and the
used registration method will be presented in Section
3. Experimental results are presented and commented
in Section 4. Finally, we conclude the work and high-
light some possible perspectives in Section 5.
2 REGION-BASED ACTIVE
CONTOURS
The region-based active contours model (Chan and
Vese, 2001) tries to stop the curve evolution with an
energy minimization approach rather than using an
edge-stopping function. Based on level set technique
(Osher and Sethian, 1988), the propagating front cor-
responds always to the zeros level set of an evolving
surface φ. The proposed energy is
E
CV
(φ, c
1
, c
2
) = µ
R
Ω
δ(φ)|∇φ(x, y)|dxdy
+ν
R
Ω
H(−φ(x, y))dxdy
+λ
1
R
Ω
| f (x, y) − c
1
|
2
H(−φ(x, y))dxdy
+λ
2
R
Ω
| f (x, y) − c
2
|
2
H(φ(x, y))dxdy,
(1)
where Ω is the image domain, f is the image intensity,
µ, ν ≥ 0 and λ
1
, λ
2
>0 are fixed parameters. H is the
Heaviside function and δ is the Dirac measure. If we
consider z as a level set of φ we can write
H(z) =
1, i f z ≥ 0
0, i f z < 0
, δ(z) =
dH(z)
dz
, (2)
Parameters c
1
and c
2
are respectively the averages of
gray-level intensities inside and outside the evolving
curve (Chan and Vese, 2001).
3 SHAPE PRIOR FORMULATION
Our goal is to define new geometric shape prior to
impose a constraint on the evolving contour to con-
verge to the target shape. If one takes a template shape
which is not defined in the image reference, it is nec-
essary to apply a transformation to align it with the
shape to segment (rotation, translation, scaling fac-
tor). To estimate the parameters of this transforma-
tion, many approaches in literature (section 1) use
alignment methods of the evolving contour and that
of the reference shape. Contour alignment methods
force these approaches to segment only single object
in the image and go without the contribution of the
level set approach, i.e. its ability to segment multi-
ple objects at once. To segment images with multiple
objects, we propose in this work a shape prior that
uses the relative motion parameters, between objects
of the same shape and have different size and orien-
tation, estimated by phase correlation. Initially we
use the method of phase correlation in Fourier space
that is appropriate to estimate the translation vector.
Second, and as discussed in the next section, we use
phase correlation in Fourier-Mellin space for estimat-
ing the rotation and the scaling factor.
3.1 Translation Estimation by Phase
Correlation
Given two images f and g and their Fourier trans-
forms respectively F and G. Suppose that f (i, j) =
g(i − a, j − b). Translation vector (a, b) can be es-
timated by computing the Fourier transform of the
cross-power spectrum given by
ψ(u, v) =
F(u, v)
G(u, v)
= e
−2iπ(u a+v b)
,
(3)
In Fig.1, we estimate the translation between two bi-
nary images which differ by translation vector equals
to (a, b)=(25, 15). Fig.2 presents the prominent peak
Figure 1: Two binary images which differ by a translation.
which corresponds to the translation vector. We note
that this method of translation estimation by phase
correlation is robust under occlusions and noise,
which often occur in real applications, compared to
translation estimation by centroid which may lead to
wrong values.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
548
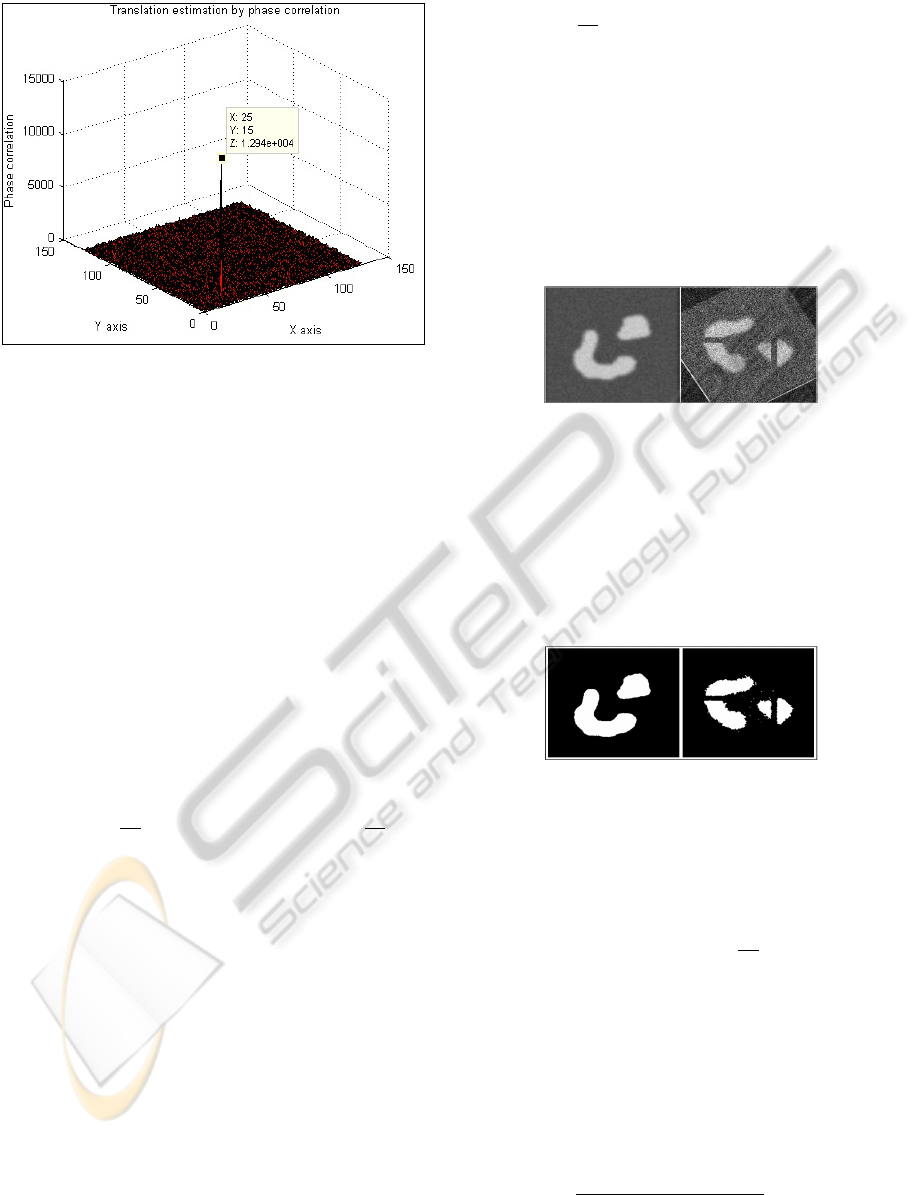
Figure 2: Fourier transform of the cross-power spectrum.
3.2 Rotation and Scaling Factor
Estimation by the Analytical
Fourier-Mellin Transform
In order to introduce phase correlation in Fourier-
Mellin space, recall that the Fourier-Mellin Transform
(FMT) is the Fourier transform on the group of pla-
nar similarities G = (R
∗
+
, S
1
) where S
1
is the unit cir-
cle. Let f (r, θ) be a polar representation of the image
with the radius r according to the center of the im-
age to offset translation and θ the angle according to
the horizontal. It was pointed out in (Ghorbel, 1994)
that the crucial numerical difficulties in computing
the Fourier-Mellin transform of an image might be
solved by using the Analytical Fourier-Mellin Trans-
form (AFMT) given by
M
f
σ
(k, v) =
1
2π
Z
+∞
0
Z
2π
0
f (r, θ)r
σ−iv
e
−ikθ
dr
r
dθ,
(4)
for all k ∈ Z, v ∈ R, and σ0. The AFMT of an object
f can be seen as the usual FMT of the distorted object
f
σ
(r, θ) = r
σ
f (r, θ). The AFMT gives a complete de-
scription of gray-level objects since f can be retrieved
by its inverse transform given by
f (r, θ) =
Z
+∞
0
∑
Z
M
f
σ
(k, v)r
−σ+iv
e
ikθ
dv,
(5)
Since no discrete transform exists, three approxima-
tions of the AFMT have been designed : the direct, the
cartesian and the fast algorithm (Derrode and Ghor-
bel, 2001). In the remainder of this work, we used the
fast algorithm as follows : with a variable change on
the integral (q = ln(r) instead of r), equation (4) can
be rewritten into Fourier transform as follows
M
f
σ
(k, v) =
1
2π
Z
+∞
−∞
Z
2π
0
e
qσ
f (e
q
, θ)e
−i(kθ+qv)
dqdθ,
(6)
The fast algorithm is obtained by computing a two di-
mensional Fast Fourier Transform (FFT) on the log-
polar distorted object e
σq
f (e
q
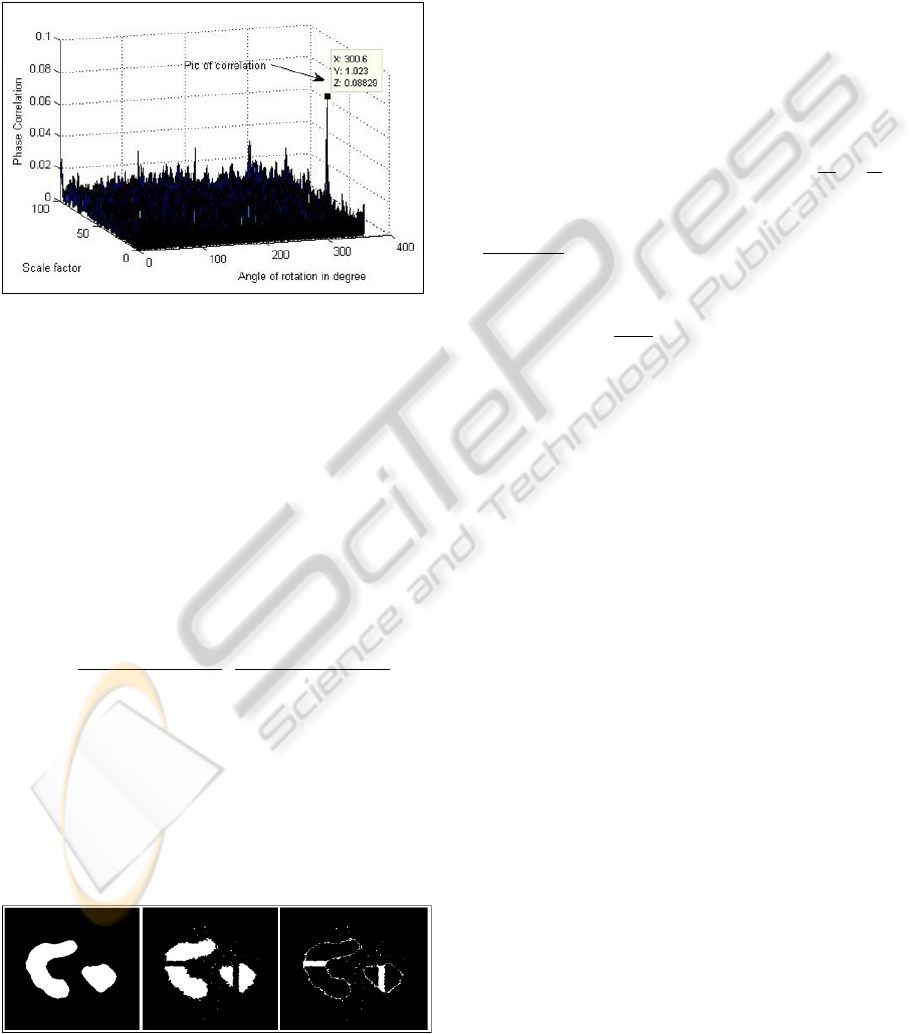
, θ). In what follows,
we illustrate the steps of our approach to estimate the
rotation angle and the scaling factor with an exam-
ple of a reference image f
re f
which is rotated 300
◦
,
partially occluded and submitted Gaussian noise with
deviation equals to 75 (Fig.3). By definition, a level
Figure 3: Left: Template image, Right: Test image.
set function assigns negative sign for points inside the
evolving contour and positive sign for those outside
it. Thus, we associate with a distance map of a level
set function φ, a binary image f
φ
. Let f
φ
re f
and f
φ
be
two binary images associated respectively with level
set functions φ
re f
and φ (Fig.4) obtained by Chan and
Vese’s model.
Figure 4: Left: The reference image ( f
φ
re f
), Right: The
transformed image ( f
φ
).
Let M
f
σ
φ
re f
and M
f
σ
φ
the AFMT of the two func-
tions f
φ
re f
and f
φ
. f
φ
re f
and f
φ
have the same shape if
and only if there is a similarity (α
0
, β
0
) ∈ G such that
∀(r, θ) ∈ G, f
φ
(r, θ) = f
φ
re f
(
r
α
0
, θ − β
0
),
(7)
The action of planar similarities in Fourier-Mellin
space leads to
M
f
σ
φ
(k, v) = α
σ−iv
0
e
−ikβ
0
M
f
σ
φ
re f
(k, v),
(8)
By calculating the normalized cross-spectrum, only
information on phase difference will be preserved.
Φ(k, v) =
M
∗
f
σ
φ
re f
(k, v)M
f
σ
φ
(k, v)
|M
∗
f
σ
φ
re f
(k, v)||M
f
σ
φ
(k, v)|
= α
−iv
0
e
−ikβ
0
,
(9)
RobustObjectSegmentationusingActiveContoursandShapePrior
549
Phase correlation of two images represented respec-
tively by f
φ
re f
and f
φ
is defined as (Sellami and Ghor-
bel, 2012)
C
T f m
(α, β) =
Z
+∞
0
∑
Z
Φ(k, v)α
iv
e
ikβ
dv,
(10)
Fig.5 shows the surface of phase correlation using
Figure 5: Surface of phase correlation.
the log-polar representation of binary images f
φ
re f
and
f
φ
. The obtained prominent peak corresponds to (θ =
300
◦
, α = 1).
3.3 The Proposed Geometric Shape
Prior
After estimating the parameters of rigid transforma-
tion between binary images (Fig.4). We perform the
registration of the image f
φ
re f
according to the follow-
ing formula (Chan and Zhu, 2005)
f
reg
φ
re f
(x, y) =
α f
φ
re f
(
(x−a)cos θ+(y−b)sin θ
α
,
−(x−a)sin θ+(y−b)cos θ
α
),
(11)
On the resulting left image of Fig.6, the pixels in black
(resp. white) correspond to positive (resp. negative)
areas of the distance map. The image on the right
shows the product function given by
f
prod
(x, y) = f
reg
φ
re f
(x, y) · f
φ
(x, y),
(12)
By construction, f
prod
is negative in the areas of
Figure 6: Left: f
reg
φ
re f
, Middle : f
φ
, Right : f
prod
.
variability between the two binary images (occlusion,
clutter, missing parts etc.). Thus we propose to mini-
mize the following energy
E
shape
=
Z
Ω
H(g(x, y))dxdy, (13)
where g(x, y)=-φ(x, y) · sign(φ
re f
(x, y)). As we can
see, this energy corresponds to the area of variability
between shapes and it is minimum only if the evolv-
ing contours correspond to the true contours of the
objects to be detected. The new energy’s functional
to be minimized is
E(φ, c
1
, c
2
) = w E
CV
+ (1 − w) E
Shape
(14)
where w is a weighting factor. Using the gradient de-
scent method for the level set function φ,
∂E
∂φ
=−
∂φ
∂t
,
the total discrete evolution equation is
φ
n+1
i j
− φ
n
i j
∆t
= w δ
ε
(φ
n
i j
)[−µ K
i, j
+ ν + λ
1
( f
i, j
− c
1
)
2
−λ
2
( f
i, j
− c
2
)
2
] + (1 − w) sign(φ
re f
i, j
) δ
ε
(g
n
i j
),
(15)
where K
i, j
= div(
∇φ
i, j
|∇φ
i, j
|
) and δ
ε
is a regular form of δ
as in (Cremers et al., 2003). Since we are interested
in updating the level set function in the regions of
variability between objects of respectively the refer-
ence and the target images, we take δ
ε
(g
n
i j
) = 0 for all
points which are outside these regions. This property
recalls the technique of narrow-band used to acceler-
ate the evolution of the level set functions (Malladi
et al., 1995).
4 EXPERIMENTAL RESULTS
We will start by illustrating the ability of the proposed
geometric shape prior to constrain the evolving con-
tour to be similar to a reference shape (by cancel-
ing the Chan and Vese’s energy. i.e. w = 0). Then
we will treat the segmentation problem. In order to
reduce the computational complexity and to have a
good estimation of the parameters of the rigid trans-
formation, we first evolve the active contour without
shape prior until convergence as in (Fang and Chan,
2007) and (Foulonneau et al., 2004). This first re-
sult provides an initialization for the model with prior
knowledge. Then, the model will evolve under data
and prior terms with an important weight assigned
to the proposed prior term (w = 0.4) to promote the
convergence of the evolving contours to the target ob-
jects.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
550
4.1 Robustness of the Proposed Shape
Prior
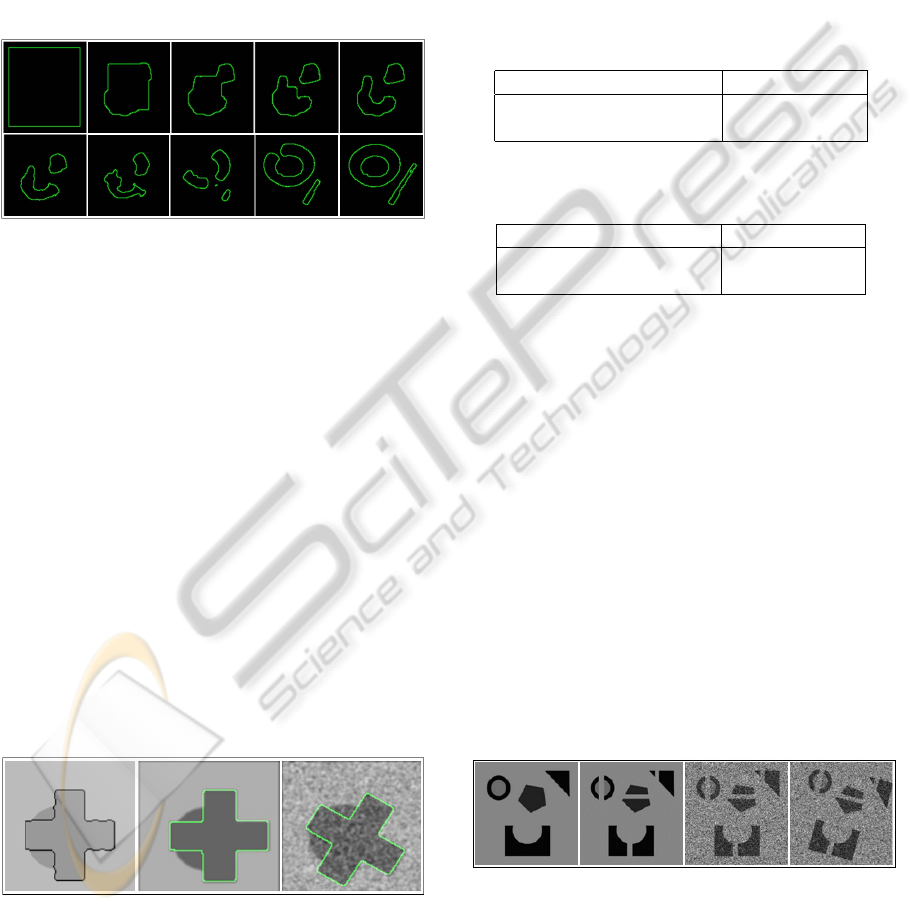
To illustrate the ability of the proposed shape prior to
constrain geometrically an active contour, we expe-
rience at first the evolution of the contour under the
influence of the proposed energy term E
Shape
. Fig.7,
first row, shows the evolution of the initial curve
which is a green rectangle until its convergence to-
ward the contours of two objects. Starting with the
Figure 7: Curve evolution under shape prior only.
final contours, shape prior term will constrain these
curves to be similar to the contours of a pen and a
disc with a hole (Fig.7, second row). As it can be
seen, the shape prior allows forcing the evolving con-
tour to find the target shapes of an arbitrary number
of objects.
4.2 Application to the Segmentation
We will evaluate the Chan and Vese’s model includ-
ing the proposed shape prior in the context of image
segmentation. We suppose that the image of reference
and its associated level set function are given.
4.2.1 Case of Single Object
In this part of experiments we will start by compar-
ing our model to that proposed by (Foulonneau et al.,
2004) on a synthetic image in which the object is par-
tially covered by a disk (Fig.8). We recall that Foulon-
Figure 8: Left: result obtained by Foulonneau et al.’s model,
Middle and Right: results obtained by our model.
neau et al.’s model presents invariance with respect to
translation and scale factor. As this model is based on
the quadratic distance between Legendre descriptors
of the target object and the template, then a small or-
der does not provide a satisfactory result and a high
order may lead to errors and a huge excution time as
it was mentioned by the authors. It is obvious that
the result obtained by our model is better. The im-
age on the right shows the robustness with respect to
rotation and noise. Table 1 shows the running time
until convergence without shape prior, whereas table
2 presents the running time until convergence with
shape prior. We recall that for rigid motion estima-
Table 1: Computation time for the experiment of Fig.8 (the
middle image) without shape prior.
Execution time
Foulonneau et al.’s model 1 minute
Our model 10.51 seconds
Table 2: Computation time for the experiment of Fig.8 (the
middle image) with shape prior.
Execution time
Foulonneau et al’s model 14 minutes
Our model 26.03 seconds
tion between binary images associated with the level
set functions, we used the AFMT of the log-polar
sampling of the image based on Fast Fourier Trans-
form (FFT 2D). Thus, time for parameter estimation
is 0.412 seconds. We deduce from table 2 that our
model is much faster.
4.2.2 Case of Multiple Objects
In this second part of experiments, we will present the
obtained results for a synthetic image with multiple
objects. Then, we will show those associated to the
real case. We present through the first image of Fig.9
the template. The second image is the target image
in which the objects present missing parts. For the
third one, we added a Gaussian noise and for the last
image, the objects were rotated by an angle of −15
◦
.
The obtained segmentation is given by Fig.10.
Figure 9: The reference image and three target images.
In the next experiment, segmentation of objects
with non trivial topology is considered. In fact ob-
jects with holes can’t be segmented with an edge-
based active contours whereas Chan and Vese’s model
represents the adapted model for this kind of objects.
RobustObjectSegmentationusingActiveContoursandShapePrior
551

Figure 10: Objects detection without shape prior (first row)
and with shape prior (second row).
Fig.11 shows the obtained results for a real image. In
the second image of this figure, the objects are par-
tially occluded and rotated −30
◦
. For the third im-
age, we added a Gaussian white noise with deviation
equals to 75. As it can be seen, the model can detect
the real contours. In (Cremers et al., 2003), the au-
Figure 11: Left: the reference image, Middle: the refer-
ence image with missing parts, partial occlusion and rota-
tion, Right: the reference image with missing parts, partial
occlusion, rotation and noise.
thors proposed a geometric shape prior that can han-
dle multiple objects. However, the problem of invari-
ance to geometric transformations was not treated.
The registration by phase correlation allowed us to
globally align the two binary images to estimate rigid
transformation’s parameters between them to calcu-
late the proposed shape prior. According to Fig.11,
we note that prior knowledge adjusts automatically
depending on missing parts or occlusions unlike (Co-
hen, 1991)’s model where initial position of the curve
must be known in advance to know if the curve should
inflate or deflate to achieve the desired contours. In
Fig.12, we seek to segment the left and right ventri-
cles of the heart on a real images with missing parts,
rotation and noise effects. The results seem to be sat-
isfactory.
Figure 12: Left: the reference image, Middle: the reference
image with missing parts, Right: the reference image with
missing parts, rotation (−60
◦
) and noise (σ = 75).
5 CONCLUSIONS
To summarize, new method of region-based active
contours with shape prior is presented. The proposed
energy constrains the evolving curve to be similar to a
given template. This approach uses the registration of
level set functions associated with the evolving con-
tour and a reference shape by phase correlation. Ex-
periments have shown the ability of the new added
term to improve the robustness of the segmentation
process in presence of textured background, missing
parts and partial occlusions of the target objects. The
addition of shape prior has not increased significantly
the execution time of the algorithm given that the pro-
posed approach does the registration only once and it
is done by the Fast Fourier Transform unlike (Leven-
ton et al., 2000) and (Foulonneau et al., 2004)’s mod-
els where at each iteration parameters estimation is
performed. As future perspectives, we are working
on extending this approach to more general transfor-
mations such as affine transformations.
REFERENCES
Caselles, V., Kimmel, R., and Sapiro, G. (1997). Geodesic
active contours. In Int. J. of Comp. Vis.
Chan, T. and Vese, L. (2001). Active contours without
edges. In IEEE Trans. Imag. Proc.
Chan, T. and Zhu, W. (2005). Level set based shape prior
segmentation. In CVPR.
Charmi, M., Mezghich, M., M’Hiri, S., Derrode, S., and
Ghorbel, F. (2010). Geometric shape prior to region-
based active contours using fourier-based shape align-
ment. In IST.
Chen, Y., Thiruvenkadam, S., Tagare, H., Huang, F., Wil-
son, D., and Geiser, E. (2001). On the incorpora-
tion of shape priors into geometric active contours. In
IEEE Workshop on Variational and Level Set Methods
in Computer Vision.
Cohen, L. (1991). On active contour models and balloons.
In Graphical Models Image Process.
Cremers, D., Sochen, N., and Schnorr, C. (2003). To-
wards recognition-based variational segmentation us-
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
552

ing shape priors and dynamic labelling. In Interna-
tional Conference on Scale Space Theories in Com-
puter Vision.
Derrode, S. and Ghorbel, F. (2001). Robust and ef-
ficient fourier-mellin transform approximations for
gray level image reconstruction and complete invari-
ant description. In Computer Vision and Image Un-
derstanding.
Fang, W. and Chan, K. (2007). Incorporating shape prior
into geodesic active contours for detecting partially
occluded object. In Pattern Recognition.
Foulonneau, A., Charbonnier, P., and Heitz, F. (2004). Con-
traintes gomtriques de formes pour les contours actifs
orients rgion : une approche base sur les moments de
legendre. In Traitement du signal.
Ghorbel, F. (1994). A complete invariant description for
grey-level images by the harmonic analysis approach.
In Pattern Recognition Lett.
Kass, M., Witkin, A., and Terzopoulos, D. (1988). Snakes :
active contour models. In Int. J. of Comp.Vis.
Leventon, M., Grimson, E., and Faugeras, O. (2000). Sta-
tistical shape influence in geodesic active contours. In
Proc. of IEEE Conference on Computer Vision and
Pattern Recognition.
Malladi, R., Sethian, J., and Vemuri, B. (1995). Shape mod-
eling with front propagation: A level set approach. In
IEEE Trans. Patt. Anal. Mach. Intell.
Osher, S. and Sethian, J. (1988). Fronts propagating
with curvature-dependent speed: algotithms based on
hamilton-jacobi formulation. In J.of Computational
Physics.
Sellami, M. and Ghorbel, F. (2012). An invariant similarity
registration algorithm based on the analytical fourier-
mellin transform. In EUSIPCO.
RobustObjectSegmentationusingActiveContoursandShapePrior
553
