
Symbol Error Rate as a Function of the Residual ISI Obtained by Blind
Adaptive Equalizers
Monika Pinchas
Department of Electrical and Electronic Engineering, Ariel University Center, Ariel 40700, Israel
Keywords:
Symbol Error Rate (SER), Blind Adaptive Equalizers, Intersymbol interference (ISI).
Abstract:
A non-zero residual intersymbol interference ( ISI) causes the symbol error rate (SER) to increase where the
achievable SER may not answer any more on the system’s requirements. Thus, having a closed-form expres-
sion for the SER that takes into account the achievable performance of the chosen blind adaptive equalizer
from the residual ISI point of view is important. In this paper, we propose a new expression for the SER valid
for the two independent quadrature carrier case that depends on the step-size parameter, equalizer’s tap length,
input signal statistics, channel power and signal to noise ratio (SNR).
1 INTRODUCTION
We consider a system involving a blind adaptive
equalizer where we wish to obtain the achievable SER
as a function of the performance of the chosen blind
adaptive equalizer from the residual ISI point of view.
The equalization performance depends on the nature
of the chosen equalizer, on the channel characteris-
tics, on the added noise (SNR), on the step-size pa-
rameter used in the adaptation process, on the equal-
izer’s tap length and on the input signal statistics.
Fast convergence speed and reaching a residual ISI
where the eye diagram is considered to be open are
the main requirements from a blind equalizer. Fast
convergence speed may be obtained by increasing the
step-size parameter. But increasing the step-size pa-
rameter may lead to a higher residual ISI which may
cause the achievable SER to increase beyond the sys-
tem’s requirements. Up to now, there is no closed-
form expression for the achievable SER that takes into
account the performance of the chosen blind adaptive
equalizer from the residual ISI point of view.
In this paper, we propose for the two indepen-
dent quadrature carrier case a closed-form approxi-
mated expression for the achievable SER as a func-
tion of the step-size parameter, equalizer’s tap length,
input signal power, SNR and channel power. The
new obtained expression for the SER is based on the
closed-form approximated expression for the residual
ISI obtained by blind adaptive equalizers presented in
(Pinchas, 2010b). Thus, it is applicable for type of
blind adaptive equalizers where the error that is fed
into the adaptive mechanism which updates the equal-
izer’s taps can be expressed as a polynomial function
of order three of the equalized output and where the
gain between the source and equalized output signal
is equal to one. It should be pointed out that Godard’s
(Godard, 1980) algorithm for example, belongs to the
mentioned type of blind adaptive equalizers.
The paper is organized as follows: After having
described the system under consideration in Section
II, the closed-form approximated expression for the
achievable SER is introduced in Section III . In Sec-
tion IV simulation results are presented and the con-
clusion is given in Section V.
2 SYSTEM DESCRIPTION
The system under consideration is illustrated in Fig-
ure 1, where we make the following assumptions:
1. The input sequence x(n) belongs to a two indepen-
dent quadrature carrier case constellation input with
variance σ
2
x
where x
r
(n) and x
i
(n) are the real and
imaginary parts of x(n) respectively and σ
2
x
r
is the
variance of x
r
(n). In the following we denote x
r
(n)
as x
r
.
2. The unknown channel h(n) is a possibly nonmin-
imum phase linear time-invariant filter in which the
transfer function has no “deep zeros”, namely, the ze-
ros lie sufficiently far from the unit circle.
3. The equalizer c(n) is a tap-delay line.
4. The noise w(n) is an additive Gaussian white noise
156
Pinchas M..
Symbol Error Rate as a Function of the Residual ISI Obtained by Blind Adaptive Equalizers.
DOI: 10.5220/0004236601560160
In Proceedings of the 3rd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2013), pages 156-160
ISBN: 978-989-8565-43-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

with zero mean and variance σ
2
w
= E[w(n)w
∗
(n)]
where (·)
∗
and E[·] denote the conjugate and expecta-
tion operator on (·) and on [·] respectively.
Figure 1: Block diagram of a baseband communication sys-
tem.
The transmitted sequence x(n) is sent through the
channel h(n) and is corrupted with noise w(n). There-
fore, the equalizer’s input sequence y(n) may be writ-
ten as:
y(n) = x(n) ∗h(n) + w(n) (1)
where ”∗” denotes the convolution operation. The
equalized output signal can be written as:
z(n) = x(n) + p(n) + ˜w(n) (2)
where p(n) is the convolutional noise, namely, the
residual intersymbol interference (ISI) arising from
the difference between the ideal equalizer’s coeffi-
cients and those chosen in the system and ˜w(n) =
w(n) ∗c(n). Next we turn to the adaptation mecha-
nism of the equalizer which is based on a predefined
cost function F(n) that characterizes the intersym-
bol interference, see (Godard, 1980), (Pinchas, 2011),
(Gi-Hong et al., 2009), (Lazaro et al., 2005) and
(Shalvi and Weinstein, 1990). Minimizing this F(n)
with respect to the equalizer parameters will reduce
the convolutional error. Minimization is performed
with the gradient descent algorithm that searches for
an optimal filter tap setting by moving in the direc-
tion of the negative gradient -∇
c
F (n) over the surface
of the cost function in the equalizer filter tap space
(Nandi, 1999). Thus the updated equation is given by
(Nandi, 1999):
c
eq
(n+ 1) = c
eq
(n) + µ ·
−∇
c
eq
F (n)
=
c
eq
(n) −µ
∂F(n)
∂z(n)
y
∗
(n)
(3)
where µ is the step-size parameter, c
eq
(n) is the
equalizer vector where the input vector is y(n) =
[y(n). . . y(n −N + 1)]
T
and N is the equalizer’s tap
length. The operator ()
T
denotes for transpose of the
function ().
3 SER AS A FUNCTION OF
EQUALIZER’S
PERFORMANCE
In this section we derive the closed-form approxi-
mated expression for the SER as a function of the
equalizer’s performance from the residual ISI point
of view.
Theorem. For the following (additional) as-
sumptions:
1. The convolutionalnoise p(n), is a zero mean, white
Gaussian process with variance σ
2
p
= E[p(n)p
∗
(n)].
The real part of p(n) is denoted as p
r
(n) and
E[p
2
r
(n)] = m
p
.
2. The source signal x(n) is a rectangular QAM
(Quadrature Amplitude Modulation) signal ( where
the real part of x(n) is independent with the imaginary
part of x(n)) signal with known variance and higher
moments.
3. The convolutional noise p(n) and the source signal
are independent. Thus,
σ
2
z
= E[z(n)z
∗
(n)] = E[(x(n) + p(n))(x(n) +
p(n))
∗
] = E[x(n)x
∗
(n)] + E[p(n)p
∗
(n)].
4.
∂F(n)
∂z(n)
can be expressed as a polynomial function of
the equalized output namely as P(z) of order three.
5. The gain between the source and equalized output
signal is equal to one.
6. The convolutional noise p(n) is independent with
˜w(n).
The achievable SER may be defined as:
SER
QAM
= 4
M− 1
M
Q
d
σ
T
1−
M− 1
M
Q
d
σ
T
(4)
where M =
p
M
QAM
and M
QAM
is the number of sig-
nal points for a M
QAM
-ary QAM constellation, d is
half the distance between adjacent
p
M
QAM
- ary PAM
signals.
σ
T
=
q
m
p
+ σ
2
˜w
r
; Q
d
σ
T
=
1
√
2π
Z
∞
d
σ
T
e
−u
2
2
du
(5)
and m
p
, σ
2
˜w
r
are according to (Pinchas, 2010b):
for Sol
mp
1
1
> 0 and Sol
mp
1
2
> 0
m
p
= min
Sol
mp
1
1
, Sol
mp
1
2
or
for Sol
mp
1
1
·Sol
mp
1
2
< 0
m
p
= max
Sol
mp
1
1
, Sol
mp
1
2
where
Sol
mp
1
1
=
−B
1
+
√
B
2
1
−4A
1
C
1
B
2A
1
Sol
mp
1
2
=
−B
1
−
√
B
2
1
−4A
1
C
1
B
2A
1
(6)
A
1
=
B
45σ
2
x
r
a
2
3
+ 18σ
2
x
r
a
3
a
12
+ 6a
1
a
3
+
9σ
2
x
r
a
2
12
+ 2a
1
a
12
−2(3a
3
+ a
12
)
+
B
45a
2
3
+ 18a
3
a
12
+ 9a
2
12
σ
2
˜w
r
SymbolErrorRateasaFunctionoftheResidualISIObtainedbyBlindAdaptiveEqualizers
157

B
1
=
B
12
σ
2
x
r
2
a
3
a
12
+ 6
σ
2
x
r
2
a
2
12
+
12σ
2
x
r
a
1
a
3
+ 4σ
2
x
r
a
1
a
12
+ a
2
1
+ 15E
x
4
r
a
2
3
+
2E
x
4
r
a
3
a
12
+ E
x
4
r
a
2
12
−
2
a
1
+ 3σ
2
x
r
a
3
+ σ
2
x
r
a
12
+
B
45a
2
3
+ 16a
3
a
12
+ 9a
2
12
σ
4
˜w
r
+
B
90a
2
3
σ
2
x
r
+ 36a
3
a
12
σ
2
x
r
+ 12a
1
a
3
+
18a
2
12
σ
2
x
r
+ 4a
1
a
12
−2a
12
−6a
3
σ
2
˜w
r
C
1
=
2
σ
2
x
r
2
a
1
a
12
+ σ
2
x
r
a
2
1
+ 2E
x
4
r
σ
2
x
r
a
3
a
12
+
E
x
4
r
σ
2
x
r
a
2
12
+ 2E
x
4
r
a
1
a
3
+ E
x
6
r
a
2
3
+
15a
2
3
+ 6a
3
a
12
+ 3a
2
12
σ
6
˜w
r
+
45a
2
3
σ
2
x
r
+ 18a
3
a
12
σ
2
x
r
+ 6a
1
a
3
+
9a
2
12
σ
2
x
r
+ 2a
1
a
12
σ
4
˜w
r
+
a
2
1
+ 12a
1
a
3
σ
2
x
r
+ 4a
1
a
12
σ
2
x
r
+ 15a
2
3
E
x
4
r
+
12a
3
a
12
σ
2
x
r
2
+ 2a
3
a
12
E
x
4
r
+ a
2
12
E
x
4
r
+
6a
2
12
σ
2
x
r
2
σ
2
˜w
r
B = µNσ
2
x
∑
l=R−1
l=0
|h
l
(n)|
2
+
µNσ
2
x
SNR
(7)
σ
2
˜w
r
∼
=
σ
2
x
r
SNR
∑
l=R−1
l=0
|h
l
(n)|
2
, SNR =
σ
2
x
σ
2
w
, R is the channel
length and a
1
, a
12
, a
3
are properties of the chosen
equalizer and given by (Pinchas, 2010b):
Re
∂F (n)
∂z(n)
=
a
1
(z
r
) + a
3
(z
r
)
3
+ a
12
(z
r
)(z
i
)
2
(8)
where Re(·) is the real part of (·) and z
r
, z
i
are the
real and imaginary parts of the equalized output z(n)
respectively.
Comments:
Assumptions 1 and 3 were also made in (Nikias and
Petropulu, 1993), (Bellini, 1986), (Fiori, 2001) and in
(Haykin, 1991). It should be noted that the described
model for the convolutional noise p(n) is applicable
during the latter stages of the process where the pro-
cess is close to optimality (Haykin, 1991). Accord-
ing to (Haykin, 1991), in the early stages of the iter-
ative deconvolution process, the ISI is typically large
with the result that the data sequence and the convo-
lutional noise are strongly correlated and the convo-
lutional noise sequence is more uniform than Gaus-
sian (Godfrey and Rocca, 1981). However, satisfy-
ing equalization performance were obtained by (Fiori,
2001) and others (Pinchas and Bobrovsky, 2006) in
spite of the fact that the described model for the con-
volutional noise p(n) was used. These results (Fiori,
2001), (Pinchas and Bobrovsky, 2006) may indicate
that the described model for the convolutional noise
p(n) can be used (maybe not in the optimum way)
in the early stages where the ”eye diagram” is still
closed. It should be pointed out that we are interested
in the SER where the blind adaptive equalizer has al-
ready convergedand leaves the system with a residual
ISI which is much lower compared with the initial ISI
(which is the usual situation). Thus, we are far away
from the case where the data sequence and the convo-
lutional noise are strongly correlated.
Proof :
According to (Proakis, 1995), for rectangular QAM
signal constellations in which M
QAM
= 2
k
, where k is
even, the QAM signal constellation is equivalent to
two PAM (Pulse Amplitude Modulation) signals on
quadrature carriers, each having
p
M
QAM
= 2
k
2
signal
points. Since the signals in the phase-quadraturecom-
ponentscan be perfectly separated at the demodulator,
the probability of error for QAM is easily determined
from the probability of error for PAM (Proakis, 1995).
Specifically, the probability of a correct decision for
the M
QAM
-ary QAM system is (Proakis, 1995):
P
c
=
1−P
√
M
QAM
2
(9)
where P
√
M
QAM
is the probability of error of a
p
M
QAM
-ary PAM with one-half the average power
in each quadrature signal of the equivalent QAM sys-
tem. Therefore, the probability of a symbol error for
the M
QAM
-ary QAM is (Proakis, 1995):
P
M
QAM
= 1−
1−P
√
M
QAM
2
(10)
According to (Thompson, 2005), for the M −2 inner
points, the probability of error of a
p
M
QAM
-ary PAM
is:
P
inner
= P(|p
r
(n) + ˜w
r
(n)|> d) =
2P((p
r
(n) + ˜w
r
(n)) > d)
(11)
where ˜w
r
(n) is the real part of ˜w(n). For the two outer
points, the probability error is (Thompson, 2005):
P
outer
= P((p
r
(n) + ˜w
r
(n)) > d) =
P
inner
2
(12)
Therefore, by using (11) and (12), the overall SER of
a
p
M
QAM
-ary PAM (Thompson, 2005) is:
SER
PAM
=
M −2
M
P
inner
+
2
M
P
outer
=
M −1
M
P
inner
(13)
Next we turn to calculate P((p
r
(n) + ˜w
r
(n)) > d).
According to assumptions 1 and 6 from this section,
we may approximate the probability density function
(pdf) of (p
r
(n) + ˜w
r
(n)) as:
ˆ
f(p
r
(n) + ˜w
r
(n)) ≃
1
√
2πσ
T
e
−(p
r
(n)+ ˜w
r
(n))
2
2σ
2
T
(14)
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
158
By using (14) we may write:
P(t > d) ≃
Z
∞
d
1
√
2πσ
T
e
−t
2
2σ
2
T
dt = Q
d
σ
T
(15)
where t = (p
r
(n)+ ˜w
r
(n)). Now, by substituting (15)
into (11) and the obtained expression for P
inner
into
(13) we obtain:
SER
QAM
= 1−
1−P
√
M
QAM
2
=
1−
1−2
M− 1
M
Q
d
σ
T
2
=
4
M− 1
M
Q
d
σ
T
1−
M− 1
M
Q
d
σ
T
(16)
This completes our proof.
4 SIMULATION
In this section we test our new proposed expression
for the SER (4) for the 16QAM case (a modula-
tion using ± {1,3} levels for in-phase and quadra-
ture components) with Godard’s algorithm (Godard,
1980) for various SNR and step-size values. It should
be pointed out that the closed-form approximated ex-
pression for m
p
was tested for various types of equal-
izers, step-size parameters, channel types, equal-
izer’s tap length and input constellations in (Pinchas,
2010b) and (Pinchas, 2010a). Thus it is reasonable
to show here only the performance for the 16QAM
case with a specific channel type. The equalizer taps
for Godard’s algorithm (Godard, 1980) were updated
according to:
c
m
(n+ 1) = c
m
(n)−
µ
G
|z(n)|
2
−
E
[
|x(n)|
4
]
E
[
|x(n)|
2
]
z(n)y
∗
(n−m)
(17)
where µ
G
is the step-size. The values for a
1
, a
12
and
a
3
corresponding to Godards’s (Godard, 1980) algo-
rithm are given by:
a
1
= −
E
[
|x(n)|
4
]
E
[
|x(n)|
2
]
; a
12
= 1; a
3
= 1 (18)
The following channel was considered: Channel1
(initial ISI = 0.44): The channel parameters were de-
termined according to (Shalvi and Weinstein, 1990):
h
n
= (0 for n < 0; −0.4 for n = 0
0.84·0.4
n−1
for n > 0).
The equalizer’s tap length was set to 13. The equal-
izer was initialized by setting the center tap equal to
one and all others to zero.
In the following we denote the SER performance
according to (4) as ”Calculated with Equalizer”. In
10 12 14 16 18 20 22
10
−8
10
−6
10
−4
10
−2
10
0
SNR
SER
Calculated without Equalizer
Calculated with Equalizer
Simulated
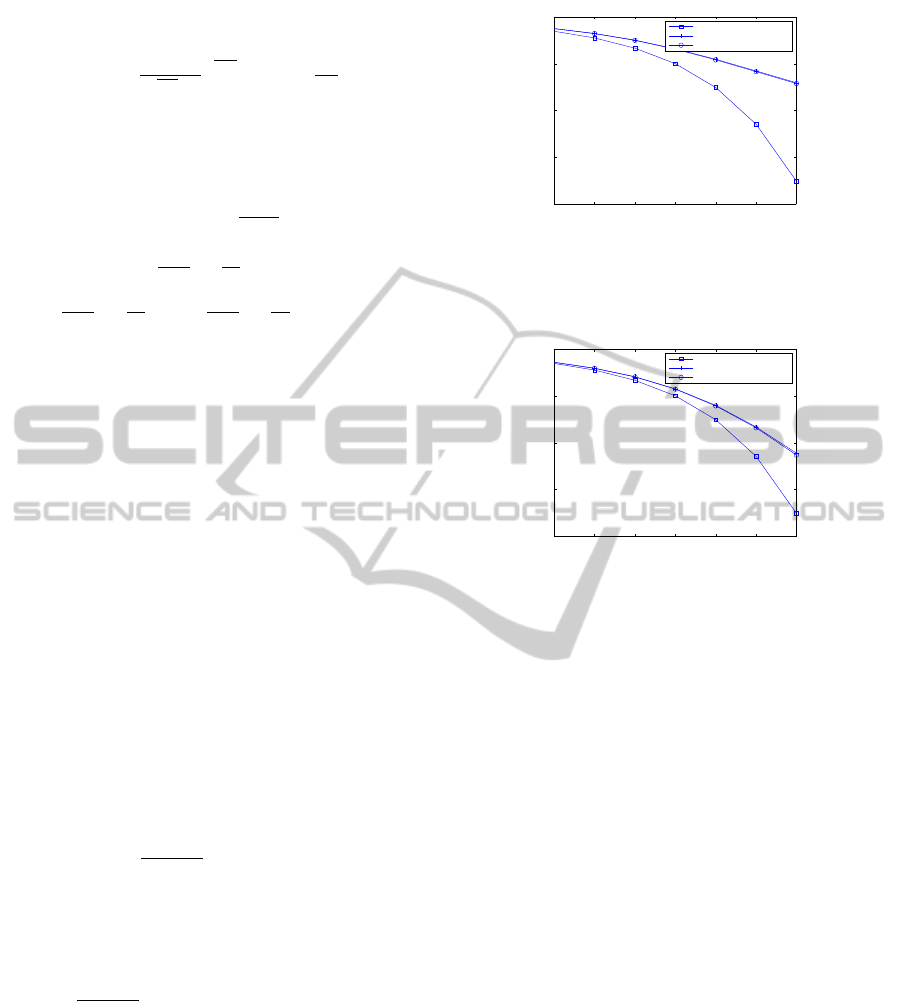
Figure 2: SER comparison with the following parameters:
d = 1, the step-size parameter µ = 0.00005, the averaged re-
sults were obtained in 100 Monte Carlo trials where 128000
symbols were produced for each trial.
10 12 14 16 18 20 22
10
−8
10
−6
10
−4
10
−2
10
0
SNR
SER
Calculated without Equalizer
Calculated with Equalizer
Simulated
Figure 3: SER comparison with the following parameters:
d = 1, the step-size parameter µ = 0.00002, the averaged re-
sults were obtained in 100 Monte Carlo trials where 128000
symbols were produced for each trial.
addition we wish to show the SER performance for
the case where the residual ISI is not taken into ac-
count. Therefore, we denote in the following the SER
performance that does not take into account the resid-
ual ISI as ”Calculated without Equalizer”. Figure 2
and Figure 3 show the SER performance as a function
of SNR of our proposed expression (4) compared with
the simulated results and with those calculated results
that do not take into account the residual ISI. Accord-
ing to Figure 2 and Figure 3, a high correlation is ob-
served between the simulated and calculated results
(4), while the opposite is seen by comparing the simu-
lated and those calculated results that do not take into
account the residual ISI. Figure 4 shows the SER per-
formance as a function of the step-size parameter of
our proposed expression (4) compared with the sim-
ulated results. According to Figure 4, a high correla-
tion is observed between the simulated and calculated
results (4).
5 CONCLUSIONS
In this paper, we propose a closed-form expression
for the SER that takes into account the achievable
SymbolErrorRateasaFunctionoftheResidualISIObtainedbyBlindAdaptiveEqualizers
159
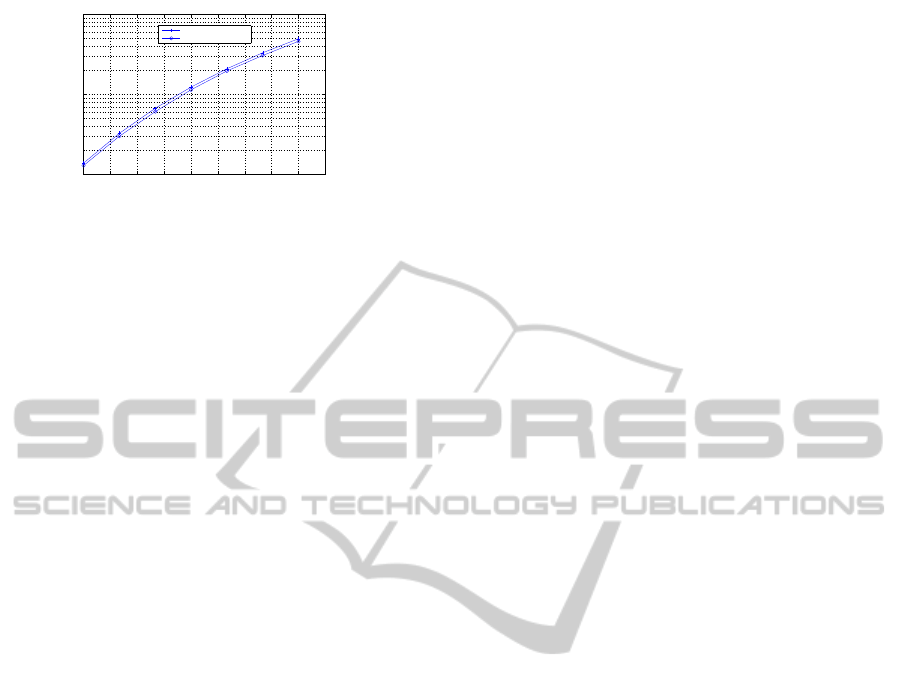
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5
x 10
−5
10
−4
10
−3
10
−2
step−size
SER
Calculated with Equalizer
Simulated
Figure 4: SER comparison with the following parameters:
d = 1, SNR = 20 [dB], the averaged results were obtained
in 100 Monte Carlo trials where 128000 symbols were pro-
duced for each trial.
performance of the chosen blind adaptive equalizer
from the residual ISI point of view. Thus, this expres-
sion depends on the step-size parameter, equalizer’s
tap length, input signal statistics, channel power and
SNR. According to simulation results, a high corre-
lation exists between the simulated and calculated re-
sults.
ACKNOWLEDGEMENTS
I would like to thank the anonymous reviewers for
their helpful comments.
REFERENCES
Bellini, S. (1986). Bussgang techniques for blind equaliza-
tion. In IEEE Global Telecommunication Conference
Records, pages 1634–1640.
Fiori, S. (2001). A contribution to (neuromorphic) blind
deconvolution by flexible approximated bayesian esti-
mation. Signal Processing (Eurasip), 81:2131–2153.
Gi-Hong, I., Park, C., and Won, H. (2009). A blind equal-
ization with the sign algorithm for broadband access.
IEEE Comm. Letters, 5(2):70–72.
Godard, D. N. (1980). Self recovering equalization and car-
rier tracking in two-dimenional data communication
system. IEEE Trans. Comm., 28(11):1867–1875.
Godfrey, R. and Rocca, F. (1981). Zero memory non-linear
deconvolution. Geophys. Prospect, 29:189–228.
Haykin, S. (1991). Blind deconvolution, in: S. Haykin
(Ed.), Adaptive Filter Theory. Prentice-Hall, Engle-
wood Cliffs, NJ.
Lazaro, M., Santamaria, I., Erdogmus, D., Pantaleon, C.,
and Principe, J. (2005). Stochastic blind equaliza-
tion based on pdf fitting using parzen estimator. IEEE
Trans. on Signal Processing, 53(2):696–704.
Nandi, A. K. (1999). Ed., Blind Estimation Using Higher-
Order Statistics. Kluwer Academic, Boston.
Nikias, C. L. and Petropulu, A. P. (1993). EDs. Higher-
Order Spectra Analysis A Nonlinear Signal Process-
ing Framework. Prentice-Hall.
Pinchas, M. (2010a). A closed approximated formed ex-
pression for the achievable residual intersymbol inter-
ference obtained by blind equalizers. Signal Process-
ing Journal (Eurasip), 90(6):1940–1962.
Pinchas, M. (2010b). A new closed approximated formed
expression for the achievable residual ISI obtained by
adaptive blind equalizers for the noisy case. In WC-
NIS2010, IEEE International Conference on Wireless
Communications, Networking and Information Secu-
rity, pages 26–30. Beijing, China.
Pinchas, M. (2011). A MSE optimized polynomial equal-
izer for 16QAM and 64QAM constellation. Signal,
Image and Video Processing, 5(1):29–37.
Pinchas, M. and Bobrovsky, B. (2006). A maximum en-
tropy approach for blind deconvolution. Signal Pro-
cessing (Eurasip), 86(10):29132931.
Proakis, J. G. (1995). Digital Communications. McGraw-
Hill Series in Electrical and Computer Engineering,
3nd edition.
Shalvi, O. and Weinstein, E. (1990). A new criteria for blind
deconvolution of nonminimum phase systems (chan-
nels). IEEE Trans. Information Theory, 36(2):312–
321.
Thompson, S. C. (2005). Constant envelope OFDM phase
modulation. PhD thesis, University of California, San
Diego, Available: http://elsteve.com/thesis/.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
160
