
Dynamic Calibration of Force Platforms by Means of
a Parallel Robot
E. Brau
1
, J. Cazalilla
2
, M. Vallés
2
, A. Besa
3
, A.Valera
2
, V. Mata
3
and A. Page
1,4
1
Instituto de Biomecánica de Valencia, Universitat Politècnica de Valencia, València, Spain
2
Departamento de Ingeniería de Sistemas y Automática, Universitat Politècnica de València, València, Spain
3
Departamento de Ingeniería Mecánica y de Materiales, Universitat Politècnica de València, València, Spain
4
Grupo de Tecnología Sanitaria del IBV, CIBER de Bioingeniería, Biomateriales y Nanomedicina (CIBER-BBN V.),
València, Spain
Keywords: Biomechanics, Force Platform, Calibration, Parallel Robot.
Abstract: Force platforms are the basic equipment to measure ground reaction forces and moments in biomechanical
studies. So, accurate in situ calibration of force platforms is critical for ensuring the accuracy and precision
of the results of experimental studies. Although there are different avaliable approaches for in situ
calibration, most of the existing methods do not use realistic and repeteable force patterns to calibrate
platforms. In this paper, a new technique based on the use of a 3PRS parallel robot for applying a predefined
dynamical load is proposed, where force patterns can be reproduced in a similar way as the used during
actual experimental measures. This robot can be programmed to apply force patterns simulating the
conditions of human gait, running or jumping. Calibration is performed by comparing the forces measured
by the platform and the ones measured by a calibrated load cell. A new algorithm was developed for
correcting the sensitivity coefficients, including an estimation of errors in the orientation of the load cell.
This method has been validated by means of an specific experiment.
1 INTRODUCTION
Force platforms (FP) are the basic device for
measuring forces and moments in biomechanical
studies. Along with human movement analysis
systems, they provide the information necessary for
the development of inverse dynamic models. Hence,
its accuracy is critical in the estimation of the
variables associated with these models (Hatze,
2002).
A standard FP is composed of a flat top plate
supported by four force transducers, usually
piezoelectric or based on strain gauges. Each sensor
provides voltage signals that are transformed into
forces through the sensitivity coefficients obtained
by calibration. Once these forces are measured, it is
possible to compute the resultant force and torque
associated to the ground reaction.
Usually, the sensitivity coefficients of the
transducers are obtained in a calibration process
before they are mounted on the FP. However,
transducers can undergo small changes in their
response over time. There also exist other errors
associated with the cross-talk effects, the orientation
of the transducers or some effects associated to
underload deformations. Therefore, it is necessary to
recalibrate the platform after assembling, and also
periodically, to ensure that measurements are
reliable over time (Schmiedmayer and Kastner,
1999); (Chockalingama et al., 2002).
Several approaches to the recalibration of FP
have been published. The first attempts were static,
based on devices that apply known forces by means
of weights (Hall et al., 1996). Although this kind of
methods is quite simple, the applied forces are static
and they do not reproduce the dynamic effects of
forces during the mesument of actual loads.
Different devices have been proposed to apply
dynamic loads for calibrating FP. Rabuffeti et al.
(2003) used a bar to manually apply a calibration
load, whereas the direction and location of such
force was measured by photogrammetry. The device
proposed by Collins et al. (2009) is similar, but uses
an instrumented bar to fully characterize the applied
load. Another alternative is proposed by Cedraro et
al. (2009) in which a load cell is used to measure the
applied forces. Although all these systems allow
applying dynamic forces, such loads are manually
132
Brau E., Cazalilla J., Vallés M., Besa A., Valera A., Mata V. and Page A..
Dynamic Calibration of Force Platforms by Means of a Parallel Robot.
DOI: 10.5220/0004235901320136
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2013), pages 132-136
ISBN: 978-989-8565-34-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

applied, so they are non-reproducible and rather
deviate from patterns of actual loads during
biomechanical measurements.
Other alternative based on mechanical devices
have been proposed to apply repeatable dynamic
loads. The simplest devices used a pendulum to
generate dynamic loads (Fairburn et al., 2000).
Others use motorized systems that generate forces of
inertia, as proposed by Hsieh et (2011). Although
both systems can reproduce repeteable patterns of
dynamical loads, they are barely versatile and
generate force patterns quite different of those
produced during biomechanical studies, such as
movements during gait, running or jumping.
In addition to the type of device to generate the
reference load, it is necessary to define a calibration
model. The most common used model assumes a
linear relationship between the output signals and
the applied forces and moments (Cappello et al,
2004). Recently, other non-linear models for the
calibration of the COP have been defined (Cappello
et al., 2011; Hsieh et al., 2011). The difference
between using linear or non-linear models is
especially relevant when the loads applied in the
calibration are quite different from those actually
applied during the experiments.
The use of robots can be useful to solve these
problems since they allow a precise and repeatable
generation of dynamical load patterns. In particular,
parallel robots have some interesting characteristics
in terms of accuracy, load capacity and velocity
range, which make them particularly suitable to
simulate dynamic patterns as those which appear in
biomechanical studies (Diaz-Rodriguez et al., 2010).
This paper proposes a method for FP
recalibration by means of a parallel robot
instrumented with a calibrated load cell. This
experimental device allows simulating patterns of
forces similar to the ones produced during walking,
running or any other gesture used in biomechanical
studies. On the other hand, we used a nonlinear
calibration model, which includes an algorithm for
correction of the alignment of the platform and the
reference cell. This algorithm has been validated
through a simulation, while the experimental device
has been applied to the calibration of a trading
platform.
2 MATERIAL AND METHODS
2.1 Calibration Device. Parallel Robot
The calibration tests were performed on a FP
Dinascan-IBV (Farhat et al., 2010). A 3PRS parallel
robot with three degrees of freedom was used to
apply the patterns of forces on the platform (Diaz-
Rodriguez et al., 2010). This robot can be
programmed to implement any predefined load
pattern whitin a wide range of forces and
frequencies (Vallés et al., 2011).
Figure 1: Calibration device. 3PRS parallel robot and
calibrated load cell.
The forces were applied on the platform through a
calibrated load cell (model Delta, ATI - Industrial
Automation), as shown in Figure 1. This cell was
placed in seven positions on the platform, defined by
a calibration grid. A steel ball was located on the cell
to ensure contact at a point. Moreover, a block of
teflon was placed in the contact area of the robot
actuator to prevent friction-induced oscillations.
Two types of load patterns were applied in this
study: a) actual gait patterns, used for the validation
of calibration algorithms, and b) calibration load
patterns consisting of a sinusoidal load of null
minimum value, peak to peak of 500 N and a
frequency of 0,5 Hz.
2.2 Platform Model
The modeled FP was a platform DINASCAN-IBV
(Farhat et al., 2010). This platform uses four sensors
instrumented with strain gauges. Each transducer
uses two channels to measure the vertical force and a
horizontal force component, respectivley. The
equation that relates the applied force and the output
sensor for the transducer k is:
Vk
Hk
k
Vk
Hk
k
dVmVcV
cHdH
Vk
Hk
f
f
f
f
SSS
SS
V
V
S
(1)
where V
Hk
and V
Vk
are the voltage signals measured
by the vertical and horizontal channels, respectively.
S
dH
and S
dV
are the direct sensitivity coefficients,
whereas S
cH
and S
cV
are the cross-talk sensitivity
coefficients. These coefficients are assumed to be
DynamicCalibrationofForcePlatformsbyMeansofaParallelRobot
133

constant, which seems to give a linear relationship
between applied forces and voltage output.
However, S
mV
is a nonlinear cross-sensitivity
coefficient, that models a nonlinear cross-talk effect
associated to deformation of transducer when a
horizontal force is applied. This deformation affects
V
Vk
in the same way regardless of the direction of the
horizontal force f
Hk
; so, S
mV
should change its sign
when f
Hk
changes its direction.
Eq. (1) allows to calculate the forces on each
sensor from measured V
Hk
and V
Vk
. Resultant force
and moment can be calculated as:
4
1
HkHkVkVk
ff uuF
(2)
)(
4
1
HkHkVkVkkO
ff uurM
(3)
where u
Vk
y u
Hk
are the unit vectors corresponding to
the vertical direction (OZ axis) and the horizontal
direction associated to sensor k (OX or OY axis,
depending on the transducer). Vector r
k
is the vector
that defines the location of the centre of transducer k
with respect to centre of the FP, O.
2.3 Recalibration Algorithm
We assume that the measurements obtained with
calibrated load cell are a gold standard. During the
recalibration the load cell was placed at m different
positions (m=7, in our study), and n load forces have
been applied at each position.
j
F
Ci
denotes the force
measured by the load cell corresponding to the i-th
force (i=1, 2, n) applied at the j-th location (j=1, 2,
..m).
j
F
i
corresponds to the same force, but measured
by the FP. The difference between both values is due
to two main sources of error. On the one hand, there
are some errors associated with errors in the
sensitivity coefficients and also it could be a small
error in the alignment of load cell and FP local
reference systems.
The error associated with the sensitivity
coefficients can be quantified by differentiating (1).
Therefore the error in the force measured by sensor
k-th is:
k
mV
dV
cV
cH
dH
ki
HvH
VH
j
k
i
Vk
Hk
j
dS
dS
dS
dS
dS
fff
ff
df
df
00
000
1
S
(4)
where
is coefficient that represents the sign of f
Hk
.
Having in mind Eq. (2), the difference between
force measured by the load cell and the FP is:
k
mV
dV
cV
cH
dH
ki
HvH
VH
j
kVkHk
Ci
j
i
j
i
j
dS
dS
dS
dS
dS
faff
ff
d
00
000
1
Suu
FFF
(5)
Equation (5) represents a linear system with 3
equations and 5•k=20 unknowns (k = 4 sensors),
corresponding to the values of dS
k
=[dS
HH
, dS
HV
,
dS
VH
, dS
VV
, dS
m
] of each sensor. By applying (5) to
the n measurements at the m locations of the load
cell, we obtain a system with 3nm and 20
unknowns that can be solved by least squares. The
computed values of dS
k
are used to correct the
sensitivity coefficients in an iterative process.
In addition to the error associated with the
sensitivity coefficients, it is necessary to consider
the error of alignement between the FP and the load
cell reference systems. This misalignement can be
described as a small rotation,
j
d that propagates as
an error in the forces measured by the load cell:
Ci
jj
Ci
j
dd FθF
(6)
Note that the error associated to the misalignment
j
d is the same for each location of the load cell,
whereas the error in (5) is due to the sensitivity
coefficients, and corresponds to the same
coefficients for any measurement (i, j). Therefore,
j
dF
Ci
can be estimated as the difference between the
measures by the cell and the FP, once the sensitivity
coefficients are corrected. The calculation of
j
dis
immediate since it is formally identical to the
infinitesimal displacements problem, whose solution
is (Page et al., 2009):
i
j
Ci
j
j
Ci
j
j
j
d FFFTθ
[
1
(7)
where,
j
[T] is a matrix similar to the tensor of inertia
of a point cluster, where the point coordinates are
replaced by the components of the forces
j
F
Ci.
The recalibration process consists of an iterative
process in which the Eqs. (5) and (7) are
consecutively solved until it converges into a
stationary solution of the sensitivity coefficients.
Two iterations are ussually enough to get a good
solution.
2.4 Validation
Two checks have been performed to validate the
calibration procedure. First, the recalibration
algorithm was validated by means of a simulation
that used data from actual measurements of the
BIODEVICES2013-InternationalConferenceonBiomedicalElectronicsandDevices
134
platform. These data were obtained from real gait
and running movements. The “actual” forces were
calculated from the nominal values of the sensitivity
coefficients and the voltage signals measured by the
transducers.Then, a random error of 10% was added
to the sensitivity coefficients, thus obtaining the
forces corresponding to the "uncalibrated" FP.
Using these data, the proposed recalibration
algorithm has been applied, and the results were
compared with those obtained with a recalibration
matrix as it is proposed in the literature (Collins et
al, 2009).
The second validation consisted of an
experiment. The platform was recalibrated by
applying a senoidal forces with a null minimum
value, peak to peak value of 500 N and a frequency
of 0.5 Hz. The load cell was placed at seven
different positions and loads with different
orientations of the horizontal force applied at each
location.
3 RESULTS
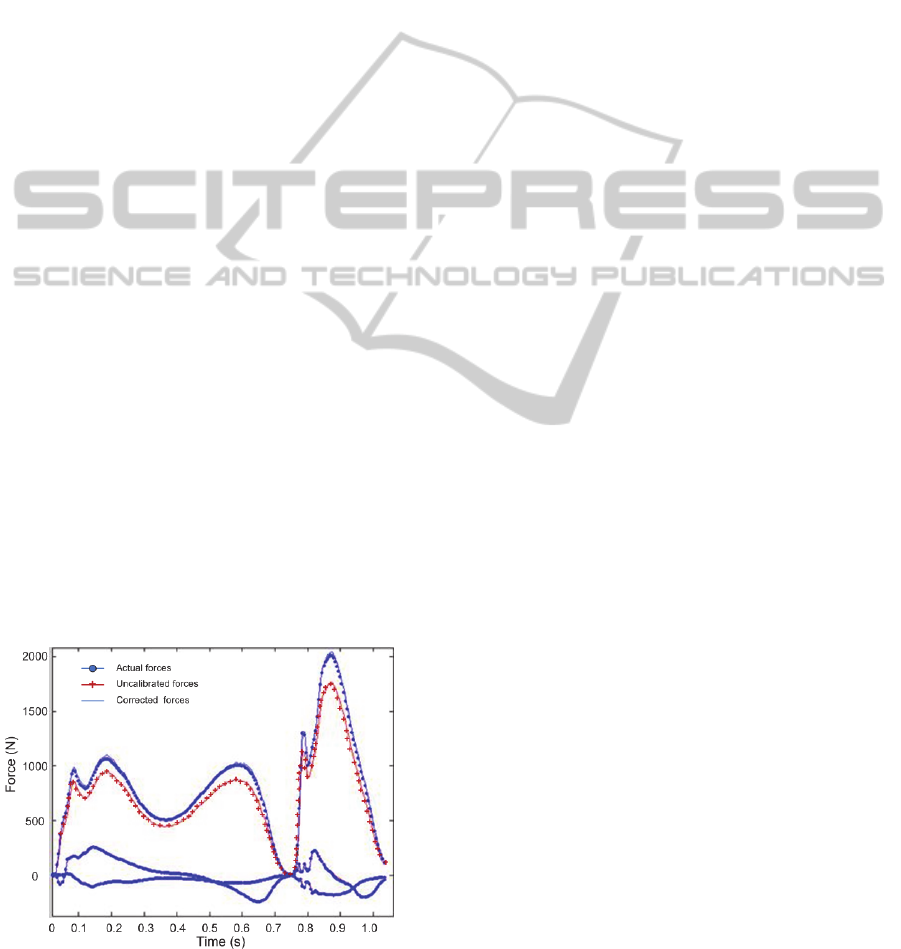
Figure 2 shows the results of a simulation with a gait
force pattern (left side) and a running pattern (right
side). The blue dotted line corresponds to the
"actual" forces calculated from the nominal
sensitivity coefficients and the voltage output of the
transducers. Red line represents the forces
corresponding to the “uncalibrated FP”, calculated
after introducing an error in the sensitivity
coefficients. These errors are large, especially in the
vertical force. Finally, the solid blue line represents
the force obtained after correcting the errors in the
sensitivity coefficients from the proposed algorithm.
Only two iterations were used.
Figure 2: Force patterns in the validation of the calibration
algorithm by simulation.
Table 1 shows the rms values of the errors,
expressed as a percentage of the actual value. The
first column shows the errors in each component of
the force. The second one displays the errors that
would be obtained if a matrix of recalibration had
applied, assuming a linear model. As it can be seen,
the linear approximation provides good
recalibration; however, important errors remain in
the Y component, probably due to the non-linear
nature of the S
mV
coefficient. The X and Z
components present smaller errors. When the
proposed model of FP is applied, the residual errors
are very small, less than 1% in all cases.
Table 1: RMS of errors in force components (% of the
actual values).
Uncalibrated
FP
After linear
recalibration
After recalibration with
the proposed model
X
4.6% 1.8% 0.1%
Y
14.1% 1.1% 0.5%
Z
20.0% 7.6% 0.4%
Table 2 shows the results of the experimental
validation. In this case, the nominal sensitivity
coefficients of the platform were used as initial data.
For these values, the initial error is not too large in
absolute values, which indicates that the coefficients
used in the previous calibration have not
experienced large variations. The greater relative
errors of horizontal components are due to the small
amplitude of such forces in the experiment (around
60 N). However, after applying the recalibration
procedure we obtain an improvement of 30% in the
case of the horizontal forces. On the contrary, the
improvement in the error in the vertical component
is not noticeable. In any case, the results show that
the proposed method allows to effectively
recalibrating FP by using dynamic force patterns.
Table 2: RMS values of force errors before and after the
recalibration process (Newton; in parentheses as a
percentage of the peak to peak values).
Before recalibration After recalibration
X component
4.8 N (8.1%) 2.9 N (4.9%)
Y component
5.3 N (8.8%) 3.9 N (6.5%)
Z component
7.7 N (1.5%) 6.7 N (1.3%)
4 DISCUSSION AND
CONCLUSIONS
This paper presents a device for calibrating FP based
on a 3PRS parallel robot. The robot was
programmed to apply forces similar to those
DynamicCalibrationofForcePlatformsbyMeansofaParallelRobot
135

produced in human gait and running.
Parallel robots can generate dynamic forces in a
realistic and repeatable way. In this sense, realism is
improved compared to static calibration systems
(Hall et al., 1996) or dynamic systems using
mechanical devices, which do not represent real
efforts during clinical applications (Fairburn et al.,
2000); (Hsieh et al., 2011)
Moreover, the system allows programming any
kind of force in a wide range of amplitudes and
temporal patterns, which improves other manual
systems as described by other authors (Rabuffeti et
al., 2003); (Collins et al., 2009); (Cedraro et al.,
2009). The robot is able to apply cyclic repeatable
forces, allowing analyzing effects such as hysteresis
or potential drifts of the sensors.
We also propose a recalibration algorithm that
allows characterizing the sensitivity coefficients of
each sensor. The procedure is not based on a linear
recalibration matrix, but performs the calibration of
each sensor using a nonlinear model. This model
also includes a process for correcting the orientation
of the load cell used as a reference. The results
obtained show that this procedure offers better
results than some systems based on linear models.
In short, parallel robots are robust and versatile
devices able to generate dynamic load patterns
similar to the forces that appear in biomechanical
studies. Combined with a suitable calibration
algorithm, they can be very useful for dynamic
calibration of FP.
ACKNOWLEDGEMENTS
This work has been funded by the Spanish
Government and co-financed by EU FEDER funds
(Grants DPI2009-13830-C02-01, DPI2009-13830-
C02-02 and IMPIVA IMDEEA/2011/ 93).
REFERENCES
Cappello, A., D. Lenzi, D., Chiari, L., (2004). Periodical
in-situ re-calibration of force platforms: a new method
for the robust estimation of the calibration matrix.
Medical and Biological Engineering and Computing,
42, pp. 350–355.
Cappello A., Bagala, F., Cedraro, A., Chiari, L., (2011).
Non-linear re-calibration of force platforms. Gait &
Posture
33, pp: 724–726.
Cedraro, A., Cappello, A., Chiari, L., (2009). A portable
system for in-situ re-calibration of force platforms:
experimental validation.
Gait & Posture, 29, pp. 449–
453.
Chockalingama, N., Giakasb, and Iossifidoua, A., (2002).
Do strain gauge force platforms need in situ
correction?
Gait & posture, 16(3), pp: 233-237.
Collins, S. H., Adamczyk, P. G., Ferris, D. P., Kuo, A. D.,
(2009). A simple method for calibrating force plates
and force treadmills using an instrumented pole
. Gait
Posture
. 2009, 29(1): 59–64.
Díaz-Rodríguez, M., Mata, V., Valera, V., Page, A.
(2010). A methodology for dynamic parameters
identification of 3-DOF parallel robots in terms of
relevant parameters. Mechanisms and Machine
Theory
, 45(9), pp 1337–1356.
Fairburn, P. S., Palmer, R., Whybrow, J., Fielden, S.,
Jones, S., (2000). A prototype system for testing force
platform dynamic performance.
Gait and Posture, pp:
25–33.
Farhat, N., Mata, V., Rosa, D., Fayos, J, (2010). A
procedure for estimating the relevant forces in the
human knee using a four-bar mechanism. Computer
Methods in Biomechanics and Biomedical
Engineering
, 13(5), pp 577-587.
Hall, M. G., Fleming, H. E., Dolan, M. J., Millbank, S. F.
D., Paul, J. P., (1996). Static in Situ Calibration of
Force Plates.
J. Biomechanics, 29(5), pp. 659-665,
1996.
Hatze, H., (2002). The fundamental problem of
myoskeletal inverse dynamics and its implications.
Journal of Biomechanics
, 35(1), pp 109–115.
Hsieh, H.-J., Lu, T.-W. Chen, S.-H., Chang,C.-M., Hung,
C.(2011). A new device for in situ static and dynamic
calibration of force platforms.
Gait & Posture 33, pp:
701–705.
Page, A., de Rosario, H., Mata, V., Atienza, C., (2009).
Experimental analysis of rigid body motion. A vector
method to determine finite and infinitesimal
displacements from point coordinates.
Journal of
Mechanical Design
131, 031005 (8 pp.).
Rabuffetti, M. Ferrarin, M., Mazzoleni, P., Benvenuti, F.,
Pedotti, A. (2003). Optimised procedure for the
calibration of the force platform location.
Gait and
Posture
17, pp: 75-80.
Schmiedmayer, H. B., Kastner, J., (1999). Parameters
influencing the accuracy of the point of force
application determined with piezoelectric force plates.
J. Biomech., 32, pp. 1237–1242.
Vallés, M., Díaz-Rodríguez, M., Valera, A., Mata, V.,
Page, A., (2011) Mechatronic developmentand
dynamic control of a 3 dof parallel manipulator.
MUSME 2011, the Int. Symposium on Multibody
Systems and Mechatronics
, Valencia, Spain, 25-28
October 2011.
BIODEVICES2013-InternationalConferenceonBiomedicalElectronicsandDevices
136
