
Musculoskeletal System Modelling
Interpolation Method for Muscle Deformation
Jana Hájková and Josef Kohout
Department of Computer Science and Engineering, University of West Bohemia, Plzeň, Czech Republic
Keywords: Deformation, Muscle Modelling, Interpolation, Musculoskeletal Model, Action Line, Mesh Skinning.
Abstract: In this paper we present an interpolation method that was derived from the muscle deformation algorithm
computed on the gradient domain deformation technique. The method uses linear constraints to preserve the
local shape of the muscle and the non-linear volume constraints to preserve the volume of the mesh. The
Gauss-Newton method with Lagrange multipliers is used as the main computation algorithm and the inter-
polation approach serves especially to smooth up deformation steps. Thanks to the interpolation of main
bones movement positions by several temporally interpositions, the large distances are optimized and the
muscles of the musculoskeletal model are deformed in a more realistic way. The method was implemented
in C++ language, using VTK framework and was integrated into the human body framework. Despite the
fact that the current implementation is not optimised, all muscles tested were processed in a few minutes on
commodity hardware, which is much faster in comparison with the traditional FEM approaches.
1 INTRODUCTION
The musculoskeletal modelling and simulation is an
important step in predicting and personalizing the
treatment for the osteoporosis patients. In the
VPHOP project (VPHOP, 2012), we aim, therefore,
at creating a virtual multi-scale model of human
body that could be used for the simulation of the
fracture in dependence on the measured parameters
and patient physical predisposition.
Starting from an atlas model of a cadaver, we
perform patient-specific adjustments to get a model
that conforms to the patient’s anatomy. This model
is then fused with the motion data of the movement
to be investigated. The positions and shapes of the
muscles during motion must be calculated, interpen-
etrations being avoided so that muscles wrap proper-
ly around the bones and other muscles. All calcula-
tions must be performed quickly so that the ap-
proach is useful for clinical practice. This is a chal-
lenge that will be address in this paper.
For testing purposes we use data for pelvis and
especially right leg. Our data consists of bones and
musculo-tendon units (aka muscles) represented by
triangular surface meshes, attachment areas of mus-
cles (sites where muscles are attached by tendons to
the bones) and of action lines, straight or piecewise
straight lines joining the points at either end of the
muscle where it is attached to the skeletal bones,
since our approach comes out from the action line
models used in biomechanical practices, e.g., (Any-
Body, 2010), (OpenSim, 2010). An action-line in
our data is a poly-line passing through one or more
via points, which, although being a popular choice,
negatively influences the quality of results. We note,
however, that one could compute a skeleton from the
mesh of the muscle and use it as a more accurate
action line to increase the reliability of the approach.
The remainder of this paper is structured as fol-
lows. In the next section, we give a brief survey of
existing methods, the basic deformation method is
outlined in Section 3, and the proposed interpolated
version of this deformation method is described in
Section 4. Results are discussed in Section 5. Sec-
tion 6 concludes the paper.
2 RELATED WORK
In biomechanics, muscles are traditionally repre-
sented by action lines because, although this does
not provide essential features of the muscle dynam-
ics, using much more accurate representations based
typically on FEM meshes, e.g., (Blemker et al.,
2005), is highly impractical in the clinical context
due to their large time requirements (several hours
73
Hájková J. and Kohout J..
Musculoskeletal System Modelling - Interpolation Method for Muscle Deformation.
DOI: 10.5220/0004214500730078
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 73-78
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

on a supercomputer). Our approach, which is in-
spired with the techniques of computer graphics,
attempts at bringing a compromise by representing a
muscle with a surface mesh that quickly deforms.
Most popular computer graphics methods for de-
formation of the surface mesh are based on mesh-
skinning technique, e.g., in (Blanco et al., 2008), that
binds a mesh to the underlying skeleton so that
change of this skeleton produce a smooth non-rigid
deformation of the mesh. However, these methods
often fail to preserve the volume of the object being
deformed, e.g., (Ju et al., 2005), and they do not
induce impenetrability between objects, which is
undesirable for our purpose.
Shi et al. (Shi et al., 2007) proposed an approach
in which, for each vertex of the mesh, an equation
describing the energy of this vertex derived from its
position is formed and the approach tries to succes-
sively reposition vertices to minimize the total ener-
gy. Each time the intersection between two meshes
is detected, a new equation describing the impulse
force at the intersected area is added into the system.
Our approach is similar to the one by Shi et al.
The most significant differences are as follows. To
speed up the process, we do not minimize the energy
of the original mesh but of a coarse mesh and then
transfer the computed values to the original mesh.
We solve the intersections locally because this gives
us a better control than the impulse force approach.
3 DEFORMATION METHOD
Bones, action lines, and muscles are positioned in
the rest pose (RP), which is the initial position for
the deformation algorithm. For bones and action
lines also their final position, called current pose
(CP), is available. To get a muscle from RP into CP,
the deformation of the muscle has to be provided.
An example can be seen in Figure 1.
a)
b)
c)
Figure 1: Position of bones (pelvis and femur) and shape
of the gluteus maximus: a) muscle and bones in RP;
b) bones in CP, muscle in RP; c) muscle deformed to CP.
The original method is based on algorithm de-
scribed in (Huang et al., 2006). For each muscle, its
outer hull (a low polygon coarse mesh) is needed.
Mostly it is loaded from the pre-computed database;
if not available, the hull is computed by the progres-
sive hull decimation algorithm (Cholt, 2012). This
coarse hull is used to get an initial approximate solu-
tion, which is then refined by a final few iterations in
which the original mesh is used. This strategy saves
both memory and computational power.
The deformation algorithm as described in
(Kellnhofer et al., 2012) defines constraints to pre-
serve the shape of the muscle, its main deformation
direction and its volume. From these constraints the
over-constrained linear system with non-linear
boundary constraint of volume was mathematically
derived. We solve the equations iteratively using
Gauss-Newton method with Lagrange coefficients.
In each iterative step, a new position for every ver-
tex of the mesh being processed (either the coarse
hull mesh or the full mesh) is computed, after which
the intersection corrections are applied to avoid
mutual inter-penetration of meshes.
3.1 Solving Intersections
During the whole deformation, computation inter-
sections are solved on two levels. In each iterative
step, it is checked, if the deformation has not moved
the mesh vertices too far. Because it profits from the
knowledge of the previous vertex position and its
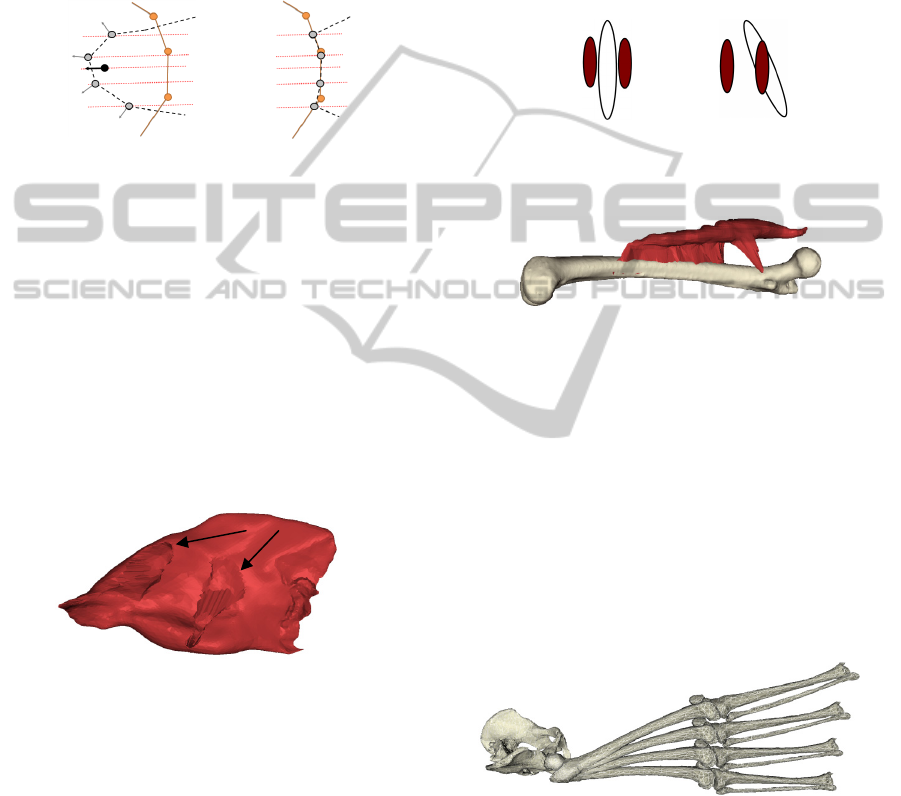
motion, it is called dynamic intersection. As can be
seen in Figure 2, if any vertex is found to lie inside
an obstacle, the adequate triangle of the obstacle in
the direction inverse to the vertex motion direction is
detected and the vertex is moved to the boundary of
the obstacle (on the detected triangle) – left gray
point in Figure 2; or to its previous position, if the
vertex has been already inside the obstacle before
the deformation step – right gray point in Figure 2.
a)
b)
Figure 2: Dynamic intersection solving schema (colour
curve represents the obstacle, black curve the deforming
muscle): a) the original position of vertices (solid line) and
the intersected vertices after deformation iteration (dashed
line); b) situation after intersection solving.
As each vertex of the original muscle mesh is de-
fined as the linear combination of all vertices of the
hull, the linear mapping is not able to represent a
larger pit pushed into the original mesh surface and,
therefore, after all iterations, the final intersection
check, called static intersection, using full meshes
must be done to prevent problems.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
74
Because we need to check the relative position of
muscles and obstacles, we cannot use any infor-
mation about the previous movement; the detection
starts from the relative positions of computed mesh-
es. Intersected vertices are grouped, for each group
its central point is computed (as an average position
of all group vertices) and all vertices of the group
are moved to the nearest triangle of the intersected
object. An example can be seen in Figure 3.
a) b)
Figure 3: Static intersection solving schema: a) central
point position and direction of vertices movement (red
dotted lines); b) intersected vertices moved to the correct
position on the border of the obstacle surface.
4 INTERPOLATION METHOD
The original deformation method described above
works well and quite quickly. But when we have a
look on its result in detail (e.g. in Figure 4) the sharp
cut of the bone into the muscle surface computed by
the original method can be seen well (in this exam-
ple pelvis bone and the gluteus maximus were used).
The enlarged detail can be also found in Figure 12a.
Figure 4: Result of the original deformation method.
This result is caused by static intersection being
solved just once. It would be advantageous to run
the static intersection solving several times to keep
the print of bones in muscles smooth and to deform
muscles more realistically.
Another problem emerges, if we have two muscles
touching a bone in RP, as it is outlined in Figure
5(a). After moving the bone into CP, the bone inter-
sects one of these muscles completely (b). As the
dynamic intersections are being solved in each itera-
tion step, the muscle vertices, which are intersected
before the deformation, remain intersected. The
result can be seen in Figure 6: the shape of the mus-
cle is incorrect as the muscle is fixed on the bone.
The basic idea of the proposed modification is sim-
ple: if the distance between RP and CP positions is
too large, we create several artificial inter-steps in
between because the static intersection will then
move the muscle mesh vertices for a smaller dis-
tance and one can expect that sharp unrealistic-
looking pits would be avoided. To create these inter-
steps, we have to interpolate all obstacles and also
action lines. Both interpolations are described in the
following sections.
a) b)
Figure 5: Schema of position of muscles and bone: a) all
in RP without any intersections; b) muscles before the
deformation in RP, bone already in CP.
Figure 6: Rectus femoris computed by the original defor-
mation method.
4.1 Bones Interpolation
As bones are represented by triangular meshes, their
vertices can be interpolated separately as:
x
i
=rp
i
+j*(cp
i
-rp
i
)/stepCoun
t
(1)
where x
i
are coordinates of the i-th vertex in the j-th
interpolation, rp
i
is the i-th vertex of the RP mesh,
cp
i
represents coordinates of the same vertex in the
CP, stepCount determines the number of interpola-
tion steps. In Figure 7, all interpolation positions of
the right leg can be seen.
Figure 7: Pelvis, right thigh and shank bones in interpolat-
ed positions.
4.2 Action Lines Interpolation
As the poly-lines representing the RP and the CP
paths of the action line may not have the same num-
ber of points, or the distribution of points along
these poly-lines may be very different, first we must
ensure that both poly-lines are matched (both have
MusculoskeletalSystemModelling-InterpolationMethodforMuscleDeformation
75
the same number and distribution of points) to simp-
ly interpolate them.
Let us assume that the RP poly-line C is formed
by the points P
0
... P
m
and the CP poly-line C' by the
points P
0
' ... P
n
'. The matching starts with an
arc-length parameterization of both poly-lines, i.e.,
to points P
i
and P
i
', we assign the parameters t
i
and
t
i
', respectively, such that:
m
k
kk
i
k
kk
i
PP
PP
t
1
1
1
1
,
n
k
kk
i
k
kk
i
PP
PP
t
1
1
1
1
´´
´´
´
(2)
Hence t
0
= t´
0
= 0 and t
m
= t´
n
= 1.
The points of the RP poly-line are now pro-
cessed. Given the point P
i
, the algorithm searches, in
increasing values of j, for a point P
j
that has not
been already matched and for which |t
i
- t
j
'| is small-
er than some allowed tolerance ε. If the outcome of
the search is negative, a new point P
j
' is introduced
on the CP poly-line at the location for which the
parameter value t
j
' = t
i
. The points P
i
and P
j
' are then
said to be matched. Any as-yet-unmatched points on
the CP poly-line are then processed using a similar
approach. By the end of this process, both poly-lines
will have the same number of points and these points
will be matched. The overall matching process is
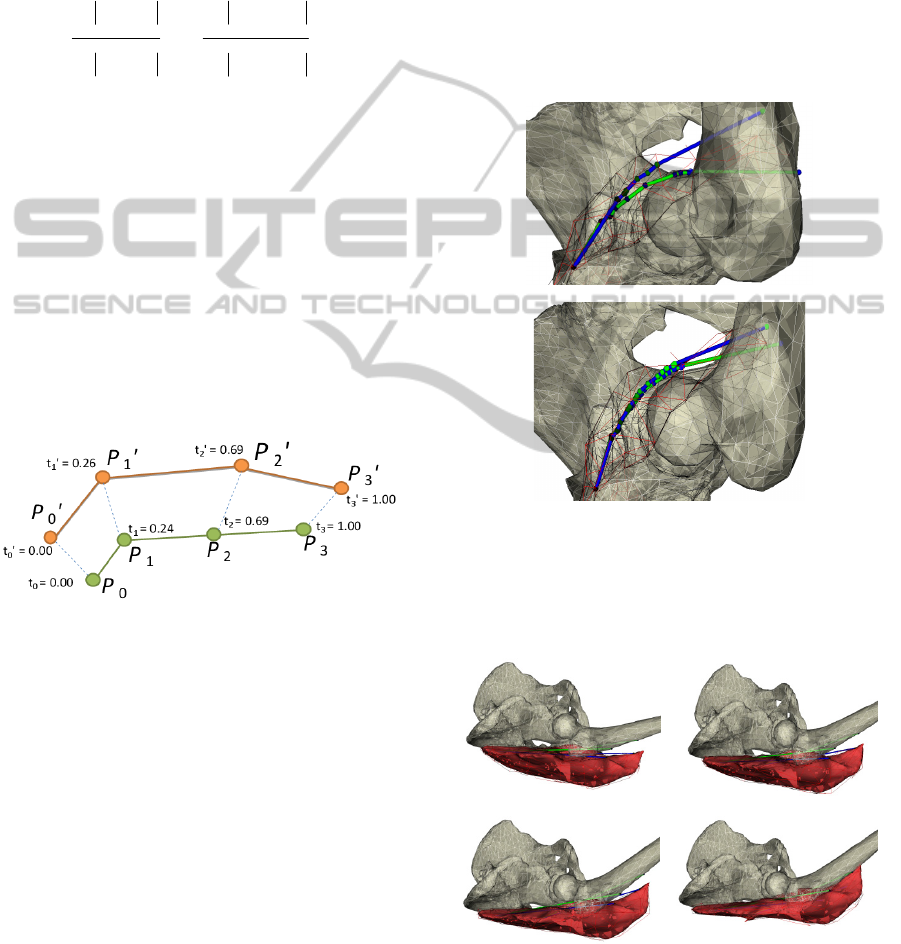
shown in Figure 8.
Figure 8: Matching the RP poly-line P
0
, P
1
, P
2
and the CP
poly-line P
0
’, P
1
’, P
2
’, P
3
’ – arc-length parameterization of
both poly-lines.
When RP and CP action lines are matched, the
interpolation can be done in the same manner as in
the case of bones. In Figure 9a, the original action
lines and their points can be seen (action line in RP
is represented by the green curve with blue points,
the action line in CP is figured as blue curve with
green points). Figure 9b shows the matched RP
action line and the interpolated first step action line.
The triangle mesh around the action lines is the hull
of deformed muscle hull in RP.
4.3 Deformation Computation
Let us assume three-step interpolation (the number
of steps can be specified either by the user or com-
puted automatically from the largest distance differ-
ence between the vertices of the original RP and
CP), i.e., we have four positions: RP = P
0
(see Fig-
ure 10a), P
1
, P
2
and P
3
= CP. The method starts with
the calculation of paths of action lines and positions
of vertices of bones at P
1
and P
2
using linear interpo-
lation of those at P
0
and P
3
. Afterwards, the original
deformation method is run to wrap muscles from P
0
into P
1
(Figure 10b), after which it is run again to
wrap muscles from P
1
to P
2
(Figure 10c) and finally,
in a successive run, to wrap these muscles into the
final position P
3
(Figure 10d).
a)
b)
Figure 9: Action lines of illiacus; RP (the more curved
one) is surrounded by the triangle surface of muscle hull:
a) the original action lines (green curve with blue points in
RP, blue curve with green points in CP); b) recomputed
action lines for the first step of the interpolation.
a)
b)
c) d)
Figure 10: Steps of the interpolation process: a) RP of the
muscle and first interpolated position of bones and action
lines (P
0
); b, c) starting position of second and third inter-
polation steps (P
1
and P
2
); d) final deformation state of the
muscle (P
3
).
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
76

5 RESULTS
Figure 11 shows the impact of the proposed new
method on the static intersection in the case of glu-
teus maximus and pelvis. The original method (a)
shifts the vertices for approx. double distances than
the interpolation method (b) and majority of them
are shifted for a similar distance, while in the new
method the shifting distance decreases to the borders
of the intersected area. This means that the created
bone print shape is smoother. Moreover, each fol-
lowing interpolation step deforms the semi-result
and so any sharp edge is smoothed.
a) b)
Figure 11: Static intersection solving (line segments repre-
sent the trajectory of moved vertices): a) at the end of the
original method computation; b) during the last interpola-
tion step.
Figure 12 compares the shapes of muscles de-
formed by both methods. It can be seen that the
muscle provided by the new method does not con-
tain any sharp edges of the pit and the gradual bor-
ders of the pit seems to correspond more with the
real forming of a consistent muscle.
a) b)
Figure 12: Result of contact area of gluteus maximus and
pelvis computed by: a) the original method; b) the interpo-
lated deformation method.
The only problem, which has yet to be resolved, is
the high computational time. Its main reason is that
it is necessary to construct a new hull before each
step because the static intersection solving at the end
of the interpolation step modifies the original mesh
and while it is possible to easily get the original
mesh from the hull (thanks to the linear mapping of
vertices) it is not possible so far to provide the re-
verse process. The computation of muscle defor-
mation needs just several seconds to get results, as
mentioned already in (Kellnhofer et al., 2012). If we
provide it several times to get the interpolation semi-
results, the computation needs still seconds to finish,
but before each interpolation step the outer low
polygon hull has to be computed again.
The progressive hulls decimation algorithm
needs easily a minute on commodity hardware to
compute a new hull and if we need to repeat it sev-
eral times during the whole interpolation, the com-
putational time grows with each single step. Because
it is not possible to provide the whole computation
on a hull or to avoid the static intersections, our
future research will be focused on possible ap-
proaches on reverse (full mesh to hull) computation.
So far one single muscle deformation together
with surrounding bones was described. The human
body contains of course many muscles which are
placed close to each other and so if more muscles
are taken into the deformation method, it should
keep the bilateral influence. Figure 14a shows the
difference between the single muscle deformation.
The muscle together with involved bones can be
seen also in Figure 13. Parallel deformation of glu-
teus maximus and gluteus medius is shown in Figure
14b-c. (in Figure 14c, only gluteus maximus is visu-
alized and so impact of gluteus medius is visible in
the bottom part of the visualized muscle).
Figure 13: Gluteus maximus computation; computed
bones (pelvis and femur) are visualized.
There was one more problem described in Sec-
tion 4: fixing of the muscle on the bone because of
the dynamic intersections. The result of interpolation
method for the used example – rectus femoris can be
seen in Figure 15. Thanks to the smaller movements
of the bone, no problems appeared.
MusculoskeletalSystemModelling-InterpolationMethodforMuscleDeformation
77
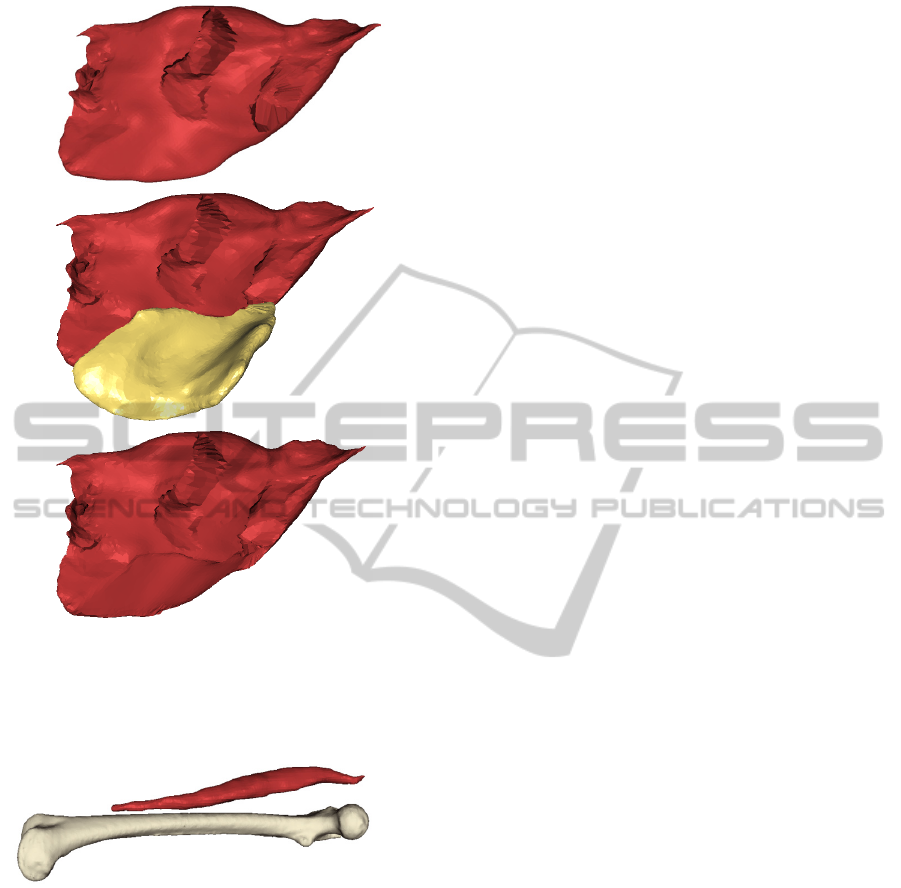
a)
b)
c)
Figure 14: Results of the interpolated deformation method
(4 steps of interpolation were used): a) gluteus maximus
computed only with bones (no other muscle); b) gluteus
maximus computed together with gluteus medius; c) visu-
alization of result from (b), gluteus medius is hiden.
Figure 15: Rectus femoris computed by the interpolated
deformation method.
6 CONCLUSIONS
We have developed method for deformation of mus-
cles in the musculoskeletal model of human body.
Despite of its high computational time (though it is
still much lower than in case of FEM methods), the
interpolation method seems to be an interesting
supplement to the currently used one-pass defor-
mation method especially in such parts of the model,
where the difference between the initial and final
position of bones is too large to provide the compu-
tation at once and where the large bones are pressed
into muscles. Moreover, the further research and
optimization of original mesh to muscle hull conver-
sion may help to decrease the computational time so
that the well looking results could be used also in the
real time model processing.
ACKNOWLEDGEMENTS
This work was partly supported by the Information
Society Technologies Programme of the European
Commission under the project VPHOP (FP7-ICT-
223865).
The authors would like to thank the various peo-
ple who provided condition under which the work
could be done.
REFERENCES
AnyBody technology (2010), available from
http://www.anybodytech.com
Blanco F. R., Oliveira M. M. (2008), Instant mesh defor-
mation, In: Proceedings of the 2008 Symposium on In-
teractive 3D Graphics and Games, Redwood City,
California, 71-78.
Blemker S. S., Delp S. L. (2005), Three-dimensional
representation of complex muscle architectures and
geometries, Annals of Biomedical Engineering 33,
661-673.
Cholt D. (2012), Progressive hulls: application on biomed-
ical data, In Proceedings of the 16th Central European
Seminar on Computer Graphics CESCG 2012, Slo-
vakia, 9-16, ISBN 978-3-9502533-4-4.
Huang, J., Shi, X., Liu, X., Zhou, K., Wei, L.Y., Teng, S.
H., Bao, H., Guo, B., and Shum, H. Y. (2006). Sub-
space gradient domain mesh deformation. ACM
Transactions on Graphics, 25(3): 1126–1134.
Ju T., Schaefer S., Warren J. (2005), Mean value coordi-
nates for closed triangular meshes, ACM Transactions
on Graphics 24 (3): 561–566.
Kellnhofer P., Kohout J. (2012), Time-Convenient Defor-
mation of Musculoskeletal System, In Proceedings of
Conference on Scientific Computing Algoritmy 2012,
Slovakia.
OpenSim project (2010), available from
https://simtk.org/home/opensim.
Richardson M. (2001), Muscle Atlas of the Extremities,
Amazon Whispernet.
Shi, X., Zhou K., Tong Y., Desbrun M., Bao H., Guo B.
(2007) Mesh Puppetry: Cascading Optimization of
Mesh Deformation with Inverse Kinematics, ACM
Transactions on Graphics - Proceedings of ACM
SIGGRAPH 2007, 26(3), ACM New York.
VPHOP (2012). the osteoporotic virtual physiological
human, http://vphop.eu/.
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
78
