
Emergent Segmentation of Topological Active Nets by Means of
Evolutionary Obtained Artificial Neural Networks
Cristina V. Sierra, Jorge Novo, Jos
´
e Santos and Manuel G. Penedo
Computer Science Department, University of A Coru
˜
na, A Coru
˜
na, Spain
Keywords:
Image Segmentation, Topological Active Nets, Differential Evolution, Artificial Neural Networks.
Abstract:
We developed a novel segmentation method using deformable models. As deformable model we used Topo-
logical Active Nets, model which integrates features of region-based and boundary-based segmentation tech-
niques. The deformation through time is defined by an Artificial Neural Network (ANN) that learns to move
each node of the segmentation model based on its energy surrounding. The ANN is applied to each of the
nodes and in different temporal steps until the final segmentation is obtained. The ANN training is obtained
by simulated evolution, using differential evolution to automatically obtain the ANN that provides the emer-
gent segmentation. The new proposal was tested in different artificial and real images, showing the capabilities
of the methodology.
1 INTRODUCTION AND
PREVIOUS WORK
The active nets model for image segmentation was
proposed (Tsumiyama and Yamamoto, 1989) as
a variant of the deformable models (Kass et al.,
1988) that integrates features of region–based and
boundary–based segmentation techniques. To this
end, active nets distinguish two kinds of nodes: in-
ternal nodes, related to the region–based information,
and external nodes, related to the boundary–based in-
formation. The former model the inner topology of
the objects whereas the latter fit the edges of the ob-
jects. The Topological Active Net (TAN) (Ansia et al.,
1999) model was developed as an extension of the
original active net model. It solves some intrinsic
problems to the deformable models such as the initial-
ization problem. It also has a dynamic behavior that
allows topological local changes in order to perform
accurate adjustments and find all the objects of inter-
est in the scene. The model deformation is controlled
by energy functions in such a way that the mesh en-
ergy has a minimum when the model is over the ob-
jects of the scene. This way, the segmentation process
turns into a minimization task.
The energy minimization of a given deformable
model has been faced with different minimization
techniques. One of the simplest methods is the greedy
strategy (Williams and Shah, 1992). The main idea
implies the local modification of the model in a way
the energy of the model is progressively reduced. The
segmentation finishes when no further modification
implies a reduction in terms of energy. As the main
advantages, this method is fast and direct, providing
the final segmentations with low computation require-
ments. However, as a local minimization method, it
is also sensitive to possible noise or complications in
the images. This method was used as a first approxi-
mation to the energy minimization of the Topological
Active Nets (Ansia et al., 1999).
As the local greedy strategy presented relevant
drawbacks, especially regarding the segmentation
with complex and noisy images, different global
search methods based on evolutionary computation
were proposed. Thus, a global search method using
genetic algorithms (Ib
´
a
˜
nez et al., 2009) was designed.
As a global search technique, this method provided
better results working under different complications
in the image, like noise or fuzzy and complex bound-
aries, situations quite common working under real
conditions. However, this approach presented an im-
portant drawback, that is the complexity. The seg-
mentation process needed large times and computa-
tion requirements to reach the desired results. As an
improvement of the genetic algorithm approach, an-
other evolutionary optimization technique was pro-
posed (Novo et al., 2011). This new approach, based
in differential evolution, allowed a simplification of
the previous method and also speed up the segmenta-
tion process, obtaining the final results in less genera-
44
V. Sierra C., Novo J., Santos J. and G. Penedo M..
Emergent Segmentation of Topological Active Nets by Means of Evolutionary Obtained Artificial Neural Networks.
DOI: 10.5220/0004195700440050
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 44-50
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

tions (implying less time).
There is very little work regarding emerging sys-
tems and deformable models for image segmenta-
tion. “Deformable organisms” were used for an au-
tomatic segmentation in medical images (McInerney
et al., 2002). Their artificial organisms possessed de-
formable bodies with distributed sensors, while their
behaviors consisted of movements and alterations of
predefined body shapes (defined in accordance with
the image object to segment). The authors demon-
strated the method with several prototype deformable
organisms based on a multiscale axisymmetric body
morphology, including a “corpus callosum worm” to
segment and label the corpus callosum in 2D mid-
sagittal MR brain images.
In this paper, we used Differential Evolution (DE)
(Price and Storn, 1997)(Price et al., 2005) to train
an Artificial Neural Network (ANN) that works as
a “segmentation operator” that knows how to move
each TAN node in order to reach the final segmenta-
tions. Section 2 details the main characteristics of the
method. It includes the basis of the Topological Ac-
tive Nets, deformable model used to achieve the seg-
mentations (Sub-section 2.1), the details of the ANN
designed (Sub-section 2.2) and the optimization of the
ANN parameters using the DE method (Sub-section
2.3). In Section 3 different artificial and real images
are used to show the results and capabilities of the ap-
proach. Finally, Section 4 expounds the conclusions
of the work.
2 METHODS
2.1 Topological Active Nets
A Topological Active Net (TAN) is a discrete imple-
mentation of an elastic n−dimensional mesh with in-
terrelated nodes (Ansia et al., 1999). The model has
two kinds of nodes: internal and external. Each kind
of node represents different features of the objects:
the external nodes fit their edges whereas the internal
nodes model their internal topology.
As other deformable models, its state is governed
by an energy function, with the distinction between
the internal and external energy. The internal en-
ergy controls the shape and the structure of the net
whereas the external energy represents the external
forces which govern the adjustment process. These
energies are composed of several terms and in all the
cases the aim is their minimization.
Internal Energy Terms. The internal energy de-
pends on first and second order derivatives which con-
trol contraction and bending, respectively. The inter-
nal energy term is defined through the following equa-
tion for each node:
E
int
(v(r, s)) = α (|v
r
(r, s)|
2
+ |v
s
(r, s)|
2
) +
β (|v
rr
(r, s)|
2
+ |v
rs
(r, s)|
2
+ |v
ss
(r, s)|
2
)
(1)
where the subscripts represent partial derivatives, and
α and β are coefficients that control the first and sec-
ond order smoothness of the net. The first and second
derivatives are estimated using the finite differences
technique.
External Energy Terms. The external energy repre-
sents the features of the scene that guide the adjust-
ment process:
E
ext
(v(r, s)) = ω f [I(v(r,s))]+
ρ
|ℵ(r, s)|
∑
p∈ℵ(r,s)
1
||v(r,s)−v(p)||
f [I(v(p))]
(2)
where ω and ρ are weights, I(v(r,s)) is the intensity of
the original image in the position v(r,s), ℵ(r,s) is the
neighborhood of the node (r,s) and f is a function,
which is different for both types of nodes since the
external nodes must fit the edges whereas the internal
nodes model the inner features of the objects.
If the objects to detect are bright and the back-
ground is dark, the energy of an internal node will
be minimum when it is on a point with a high grey
level. Also, the energy of an external node will be
minimum when it is on a discontinuity and on a dark
point outside the object. Given these circumstances,
the function f is defined as:
f [I(v(r, s))] =
IO
i
(v(r, s)) + τIOD
i
(v(r, s)) for internal nodes
IO
e
(v(r, s)) + τIOD
e
(v(r, s)) + for external
ξ(G
max
− G(v(r, s))) + δGD(v(r,s)) nodes
(3)
where τ, ξ and δ are weighting terms, G
max
and
G(v(r, s)) are the maximum gradient and the gradient
of the input image in node position v(r,s), I(v(r,s))
is the intensity of the input image in node position
v(r, s), IO is a term called “In-Out” and IOD a term
called “distance In-Out”, and GD(v(r,s)) is a gradi-
ent distance term. The IO term minimizes the energy
of individuals with the external nodes in background
intensity values and the internal nodes in object inten-
sity values meanwhile the terms IOD act as a gradi-
ent: for the internal nodes (IOD
i
) its value minimizes
towards brighter values of the image, whereas for the
external nodes its value (IOD
e
) is minimized towards
low values (background).
The adjustment process consists of minimizing
these energy functions, considering a global energy as
the sum of the different energy terms, weighted with
the different exposed parameters, as used in the opti-
mizations with a greedy algorithm (Ansia et al., 1999)
or with an evolutionary approach (Ib
´
a
˜
nez et al., 2009;
Novo et al., 2011).
EmergentSegmentationofTopologicalActiveNetsbyMeansofEvolutionaryObtainedArtificialNeuralNetworks
45
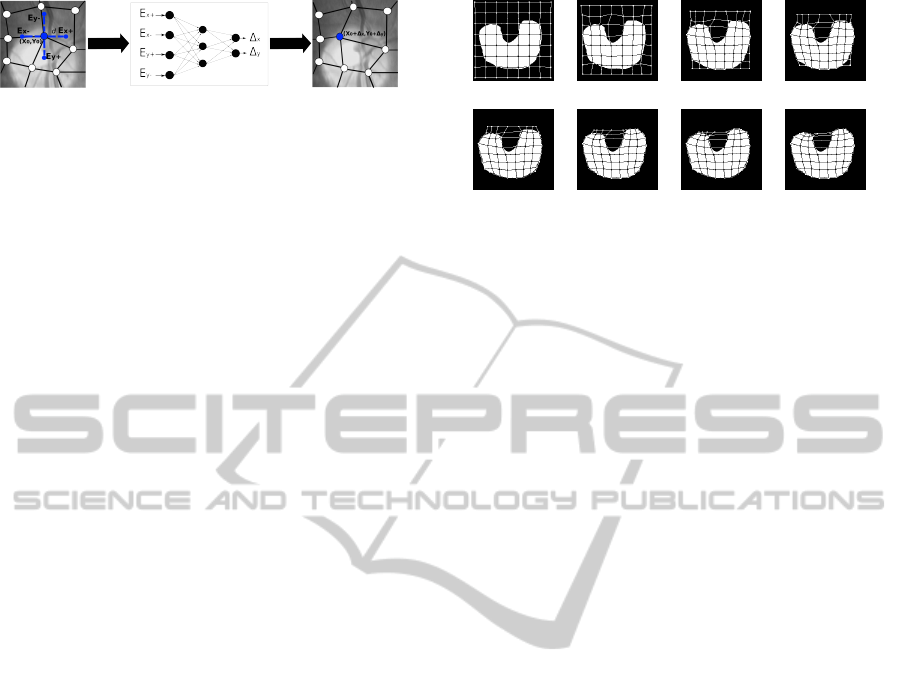
Figure 1: Diagram of the shift production for a given TAN
node using the ANN.
2.2 Artificial Neural Networks for the
Image Segmentation
A new segmentation technique that uses Artificial
Neural Networks (ANNs) to perform the optimiza-
tion of the Topological Active Nets is proposed in this
work. In particular, we used a classical multilayer per-
ceptron model that is trained to know how the TAN
nodes have to be moved and reach the desired seg-
mentations.
The main purpose of the ANNs consist of pro-
viding, for a given TAN node, the most suitable
movement that implies an energy minimization of the
whole TAN structure. This is not the same as the
greedy algorithm, which determines the minimization
for each node movement. All the characteristics of the
network were designed to obtain this behavior, and
are the following:
Input. The ANN is applied iteratively to each of the
TAN nodes. The network has as input the four hy-
pothetical energy values that would take the mesh
if the given node was moved in the four cardinal
directions. Moreover, these values are normalized
with respect to the energy in the present position,
given the high values that the energy normally
takes, following the formula:
E
0
i
= (E
i
− E
c
)/E
c
(4)
where E
i
is the given hypothetical energy to be
normalized and E
c
is the energy with the TAN
node in the present location.
Hidden Layers. One single hidden layer composed
by a different number of nodes. The sigmoid
transfer function was used for all the nodes.
Output. The network provides the movement that
has to be done in each axis for the given TAN
node. So, it has two output nodes that specify the
shift in both directions of the current position.
These characteristics can be seen in Figure 1. In
this case, we obtain the values of the hypothetical en-
ergies that would be taken if we move the central node
in the x and y axes, represented by the E
x−
,E
x+
,E
y−
and E
y+
values. These are introduced as the input val-
ues in the corresponding ANN, that produces, in this
example, a horizontal displacement for the given TAN
Step 0 Step 9 Step 23 Step 31
Step 38 Step 47 Step 52 Step 65
Figure 2: Emergent segmentation provided by the ANN in
different steps.
node. This movement, provided by the network out-
puts, is restricted in a small interval of pixels around
the current position, typically between 1 and 5 pixels
in both axes and directions.
Once we have the ANN correctly trained (with the
evolutionary algorithm), we can use it as a “segmenta-
tion operator” that progressively moves the entire set
of TAN nodes until, after a given number of steps, the
TAN reaches the desired segmentation. In this pro-
cess, the ANN is applied to each of the nodes sequen-
tially. Such a temporal “step” is the application of
the ANN to all the nodes of the TAN. An example of
segmentation is shown in Figure 2, where the TAN
was established initially in the limits of the image and
all the nodes were moved until a correct segmentation
was reached.
2.3 Differential Evolution for the
Optimization of the Artificial
Neural Network
Differential Evolution (DE) (Price and Storn,
1997)(Price et al., 2005) is a population-based
search method. DE creates new candidate solutions
by combining existing ones according to a simple
formula of vector crossover and mutation, and then
keeping whichever candidate solution which has the
best score or fitness on the optimization problem at
hand. The central idea of the algorithm is the use
of difference vectors for generating perturbations in
a population of vectors. This algorithm is specially
suited for optimization problems where possible so-
lutions are defined by a real-valued vector. The basic
DE algorithm is summarized in the pseudo-code of
Figure 3.
One of the reasons why Differential Evolution is
an interesting method in many optimization or search
problems is the reduced number of parameters that
are needed to define its implementation. The parame-
ters are F or differential weight and CR or crossover
probability. The weight factor F (usually in [0, 2])
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
46

1. Initialize all individuals x with random
positions in the search space
2. Until a termination criterion is met,
repeat the following:
For each individual x in the population do:
2.1 Pick three random individuals x
1
,x
2
,x
3
from the population they must be distinct
from each other and from individual x.
2.2 Pick a random index Rε1,...,n, where the
highest possible value n is the dimensionality
of the problem to be optimized.
2.3 Compute the individual’s potentially new position
y = [y
1
,...,y
n
] by iterating over each iε1,...,n as follows:
2.3.1 Pick r
i
εU (0, 1) uniformly from the open
range (0,1).
2.3.2 If (i = R) or (r
i
< CR)
let y
i
= x
1
+ F (x
2
− x
3
), otherwise let y
i
= x
i
.
2.4 If ( f (y) < f (x)) then replace the individual x
in the population with the improved candidate
solution, that is, set x = y in the population.
3. Pick the individual from the population that has the
lowest fitness and return it as the best found
candidate solution.
Figure 3: Differential Evolution Algorithm.
is applied over the vector resulting from the differ-
ence between pairs of vectors (x
2
and x
3
). CR is the
probability of crossing over a given vector (individ-
ual) of the population (x
1
) and a vector created from
the weighted difference of two vectors (F(x
2
− x
3
)),
to generate the candidate solution or individual’s po-
tentially new position y. Finally, the index R guaran-
tees that at least one of the parameters (genes) will be
changed in such generation of the candidate solution.
One of the main advantages of DE is that it pro-
vides an automatic balance in the search. As it was
indicated (Feoktistov, 2006), the fundamental idea of
the algorithm is to adapt the step length (F(x
2
− x
3
))
intrinsically along the evolutionary process. At the
beginning of generations the step length is large, be-
cause individuals are far away from each other. As
the evolution goes on, the population converges and
the step length becomes smaller and smaller.
2.3.1 ANN Genotypic Encoding
In our application, a single ANN was used to learn
the movements that have to be done by the internal
and the external nodes. In the evolutionary popula-
tion, each individual encodes the ANN. The geno-
types code all the weights of the connections between
the different nodes of the ANN. The weights were en-
coded in the genotypes in the range [−1,1], and de-
coded to be restricted in an interval [-MAX VALUE,
MAX VALUE]. In the current ANN used, the inter-
val [−1,1] was enough to determine output values in
the whole range of the transfer functions of the nodes.
We initialized the TAN nodes in the borders of the
images and applied a fixed number of steps. Each step
consists of the modification produced by the ANN for
each of the nodes of the TAN. Finally, the fitness as-
sociated to each individual or encoded ANN is the en-
ergy that has the final configuration of the TAN which
must be minimized. So, the fitness is defined only by
the final emergent segmentation provided by an en-
coded ANN.
Moreover, the usual implementation of DE
chooses the base vector x
1
randomly or as the indi-
vidual with the best fitness found up to the moment
(x
best
). To avoid the high selective pressure of the
latter, the usual strategy is to interchange the two pos-
sibilities across generations. Instead of this, we used
a tournament to pick the vector x
1
, which allows us to
easily establish the selective pressure by means of the
tournament size.
3 RESULTS
Different representative artificial and real CT images
were selected to show the capabilities and advantages
of the proposed method. Regarding the evolutionary
DE optimization, all the processes used a population
of 1000 individuals and the tournament size to select
the base individual x
1
in the DE runs was 5% of the
population. We used a fixed value for the CR param-
eter (0.9) and for the F parameter (0.9). These values
provided the best results in all the images. In the cal-
culation of the fitness of the individual, we applied a
number of steps between 50 and 400, depending on
the complexity and the resolution of the image.
Table 1 includes the energy TAN parameters used
in the segmentation examples. Those were experi-
mentally set as the ones in which the corresponding
ANN gave the best results for each training.
Table 1: TAN parameter sets used in the segmentation pro-
cesses of the examples.
Figures Size α β ω ρ ξ δ τ
4,5,6 8 × 8 1.0 1.0 10.0 4.0 0.0 6.0 30.0
7 12 × 12 0.0 2.0 20.0 3.0 0.0 5.0 0.0
9 8 × 8 4.5 0.8 10.0 2.0 7.0 20.0 40.0
10 8 × 8 4.5 0.8 10.0 2.0 7.0 20.0 40.0
3.1 Segmentation of Artificial Images
Firstly, we tested the methodology with artificial im-
ages with different characteristics. In this case, we
used a training set of 4 artificial images, each one with
different characteristics (different shapes, inclusion of
EmergentSegmentationofTopologicalActiveNetsbyMeansofEvolutionaryObtainedArtificialNeuralNetworks
47
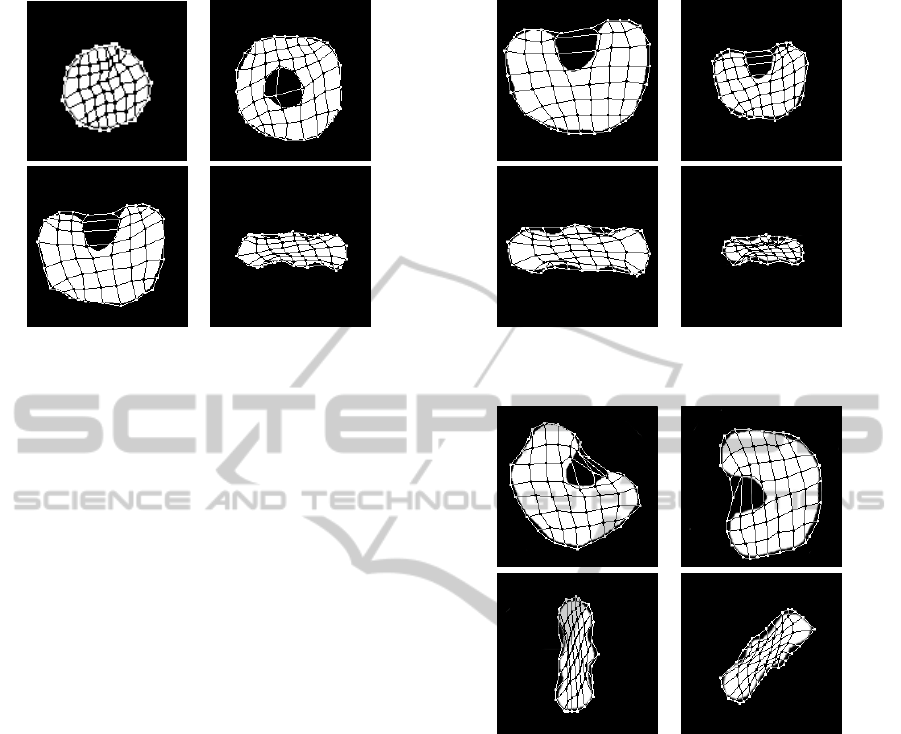
Figure 4: Results obtained with the best ANN for the seg-
mentation of the training images.
concavities, holes, etc.). The fitness is defined as the
sum of the individual fitnesses provided by the same
ANN (individual) in all the training images.
Figure 4 shows the final segmentations obtained
with the training set. Moreover, we tested the trained
ANNs with a different set of images. Once we have
the ANNs trained, the segmentation is fast and direct,
applying the modifications to the TAN nodes a given
number of steps until we reach the final segmentation.
Note that two of the images have great difficulties for
a perfect segmentation, with a big hole and a deep
concavity, so some nodes can incorrectly fall in the
hole or the concavity. For testing the trained ANN,
we scaled and rotated a couple of difficult images of
the training dataset, to verify the independence of the
training regarding modifications in the used objects.
Figures 5 and 6 show the final results with the test
set of images. As the Figures show, the ANNs are
able to reach correct results, which demonstrates that
the ANN has learned to move correctly the nodes, in-
dependently of the training image or images used, to
provide a final correct segmentation.
3.2 Comparison of the proposed
Method and the Greedy Algorithm
We compared the proposed method with respect to the
greedy approach previously defined. We selected a
domain with real difficult images, as we segmented
the optic disc in eye fundus images, as detailed in
(Novo et al., 2009). The objective is the segmentation
of the optic disc (oval bright area in the image) which
also provides the localization of the center of the op-
tic disc. As Figure 7 shows, the greedy local search
falls in local minima quite fast, being impossible to
reach the optic disc boundary (Figure 7 (a)). On the
Figure 5: Results obtained when the best ANN is tested
with scaled artificial objects.
Figure 6: Results obtained when the best ANN is tested
with rotated artificial objects.
contrary, the ANN learned how to move all the nodes
and was capable to reach an acceptable result (Figure
7 (b)–(d)). Note the capability of the evolved ANN
to overcome the high level of noise, that prevents the
correct segmentations by the greedy methodology.
In this case, additionally to the TAN energy pa-
rameters depicted in Table 1, we also used the ad-hoc
energy terms designed for this specific task, as de-
tailed in (Novo et al., 2009). These energy terms are
“circularity”, that potentiates a circular shape of the
TAN, and “contrast of intensities”, that tries to put
the external nodes in locations with bright intensities
in the inside and dark intensities outside. This term
was designed to avoid the falling of the external nodes
in the inner blood vessels. In this segmentation, the
corresponding energy parameters of these two ad-hoc
energy terms took values of cs = 30.0 and ci = 15.0,
respectively.
To explain why the greedy local search and the
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
48
(a) (b)
(c) (d)
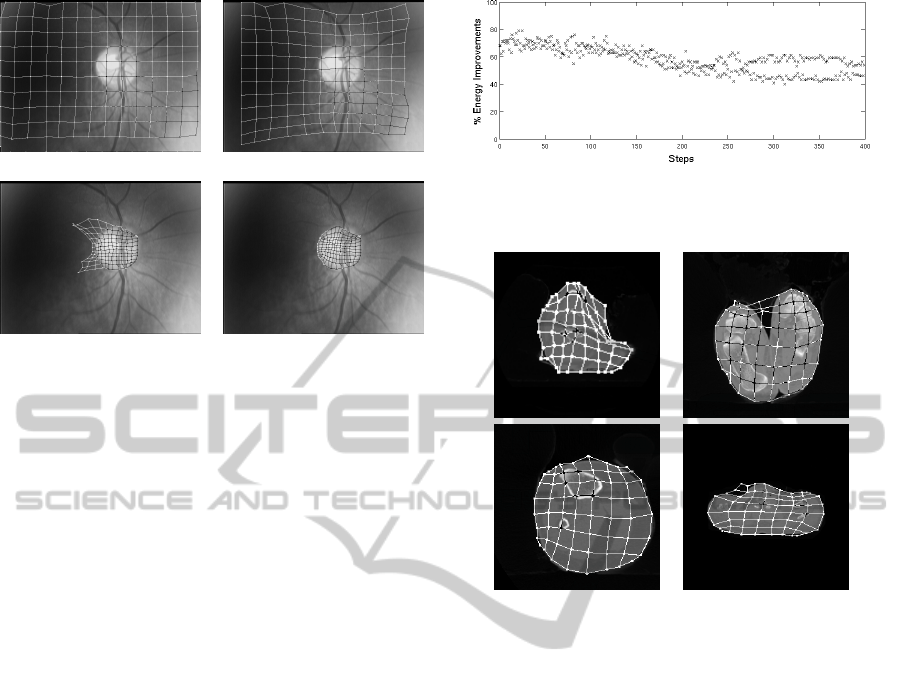
Figure 7: Comparison between the greedy algorithm and
the proposed method. (a) Final result with the greedy ap-
proach. (b)–(d) Segmentation provided by the ANN in dif-
ferent temporal steps: 30, 171 and 399.
proposed method behave differently, we included, in
Figure 8, a graphic with the percentage of the TAN
node shifts that implied a maintenance or improve-
ment (decrement) in terms of energy, and for each
step in the segmentation of the optic disc of Figure
7. In the graphic, the main difference between the
proposed method and the greedy local search is clear.
Using the greedy method, all the movements of the
TAN nodes imply a new position with an energy at
least the same as the previous one, and better if pos-
sible (100% in the graph). That is why, in this par-
ticular segmentation, the greedy method falls in local
minima, because the nodes cannot find a better posi-
tion in the neighborhood and in few steps. However,
with the proposed method, the ANN learned to pro-
duce “bad” movements (an average of 50% at the final
steps), that implied worse energies in the short term,
but they were suitable to find a correct segmentation
in terms of the entire segmentation process.
3.3 Segmentation of Real Images
Moreover, as in the case with artificial images, we
trained the ANNs with a given set of medical CT im-
ages, and after that, we tested the method with a dif-
ferent dataset. We selected a set of images that in-
cluded objects with different shapes and with differ-
ent levels of complexity. The CT images correspond
to a CT image of the head, the feet, the knee and a
CT image at the level of the shoulders. The images
used in the testing correspond to CT images of the
same close areas, but with a slightly different shape
and with deeper concavities. All these CT images pre-
sented some noise surrounding the object, noise that
Figure 8: Percentage of TAN node movements with an en-
ergy maintenance or improvement, over the temporal steps,
and using the trained ANN in the segmentation of Figure 7.
Figure 9: Results obtained with the best evolved ANN and
the training set of real CT images.
was introduced by the capture machines when obtain-
ing the medical CT images.
Figure 9 includes the final segmentations with the
training dataset, whereas Figure 10 details the final
segmentations obtained with the best trained ANN
and the test set of images. In both cases, the evolved
ANN was capable to provide acceptable results, in-
cluding a correct boundary detection and overcoming
the presence of noise in the images.
Again, in the difficult parts of the images, like the
concavities, some external nodes fall incorrectly in
the background. This can be improved changing the
energy parameters, increasing the TAN energy GD
(Gradient Distance), but it deteriorates other objec-
tives like smoothness. So, the energy parameters are
always a compromise to obtain acceptable results in
different kind of images.
4 CONCLUSIONS
We proposed a new methodology for image segmen-
tation using deformable models. We used Topological
Active Nets as extended model which integrates fea-
tures of region-based and boundary-based segmenta-
EmergentSegmentationofTopologicalActiveNetsbyMeansofEvolutionaryObtainedArtificialNeuralNetworks
49
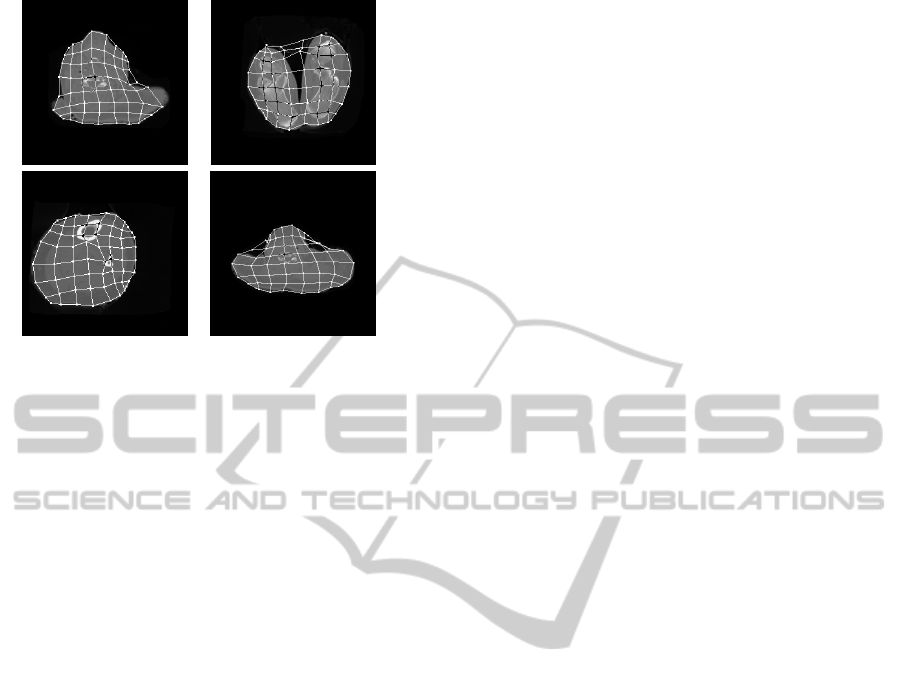
Figure 10: Results obtained with the best evolved ANN and
the test dataset of real CT images.
tion techniques. The deformation through time was
defined by an evolutionary trained ANN, since the
ANN determined the movements of each one of the
nodes. The process was repeated for all the nodes and
in different temporal steps until the final segmentation
was obtained.
Thus, the ANN provides an “emergent” segmen-
tation, as a result of the local movements provided by
the ANN and the local and surrounding energy infor-
mation that the ANN receives as input. The methodol-
ogy was proved successful in the segmentation of dif-
ferent artificial and real images, and overcoming noise
problems. Moreover, we tested the ANN, trained with
a set of images, with different testing images, obtain-
ing acceptable results. So, our trained ANNs can be
considered as “segmentation operators”.
ACKNOWLEDGEMENTS
This paper has been partly funded by the Ministry
of Science and Innovation through grant contracts
TIN2011-25476 and TIN2011-27294 and by the Con-
seller
´
ıa de Industria, Xunta de Galicia through grant
contract 10/CSA918054PR using FEDER funds.
REFERENCES
Ansia, F., Penedo, M., Mari
˜
no, C., and Mosquera, A.
(1999). A new approach to active nets. Pattern Recog-
nition and Image Analysis, 2:76–77.
Feoktistov, V. (2006). Differential Evolution: In Search of
Solutions. Springer, New York, USA.
Ib
´
a
˜
nez, O., Barreira, N., Santos, J., and Penedo, M. (2009).
Genetic approaches for topological active nets opti-
mization. Pattern Recognition, 42:907–917.
Kass, M., Witkin, A., and Terzopoulos, D. (1988). Snakes:
Active contour models. International Journal of Com-
puter Vision, 1(2):321–323.
McInerney, T., Hamarneh, G., Shenton, M., and Terzopou-
los, D. (2002). Deformable organisms for automatic
medical image analysis. Medical Image Analysis,
6:251–266.
Novo, J., Penedo, M. G., and Santos, J. (2009). Locali-
sation of the optic disc by means of GA-Optimised
Topological Active Nets. Image and Vision Comput-
ing, 27:1572–1584.
Novo, J., Santos, J., and Penedo, M. G. (2011). Optimiza-
tion of Topological Active Nets with differential evo-
lution. Lecture Notes in Computer Science: Adaptive
and Natural Computing Algorithms, 6593:350–360.
Price, K. and Storn, R. (1997). Differential evolution - a
simple and efficient heuristic for global optimization
over continuous spaces. Journal of Global Optimiza-
tion, 11(4):341–359.
Price, K., Storn, R., and Lampinen, J. (2005). Differential
Evolution. A Practical Approach to Global Optimiza-
tion. Springer - Natural Computing Series.
Tsumiyama, K. and Yamamoto, K. (1989). Active net: Ac-
tive net model for region extraction. IPSJ SIG notes,
89(96):1–8.
Williams, D. J. and Shah, M. (1992). A Fast algorithm for
active contours and curvature estimation. CVGIP: Im-
age Understanding, 55(1):14–26.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
50
