
A Stochastic Queueing Model for Multi-robot Task Allocation
Ang´elica Mu˜noz-Mel´endez
1,2
, Pritviraj Dasgupta
2
and William Lenagh
2
1
Computer Science Department, National Institute of Astrophysics, Optics, and Electronics,
Luis Enrique Erro 1, Sta Ma Tonantzintla, Puebla 72840, Mexico
2
Computer Science Department, University of Nebraska at Omaha, Omaha NE 68182, U.S.A.
Keywords:
Robot Team, Task Allocation, Demand, Stochastic Queue.
Abstract:
A central problem in multi-robot systems is to solve the multi-robot task allocation problem. In this paper, a
decentralized stochastic model based on stochastic queueing processes is applied for an application of collec-
tive detection of underground landmines where the robots are not told the distribution or number of landmines
to be encountered in the environment. Repeat demands of inspection in the environment to ensure the accu-
racy of robot findings are necessary in this application. The proposed model is based on the estimation of a
stochastic queue of pending demands that represents the alternatives of action for a robot and is used to nego-
tiate possible conflicts with other robots. We compare and contrast this method with a decentralized greedy
approach based on the distance towards the sites where inspection demands are required. Experimental results
obtained using simulated robots in the Webots
c
environment are presented. The performance of robots is
measured in terms of two metrics, completion time and distance traveled for processing a demand. Robots
applying the stochastic queueing model obtained competitive results.
1 INTRODUCTION
Over the past few years, multi-robot systems have
been successfully employed to solve problems in
several robotic domains such as unmanned search
and rescue, autonomous exploration of regions that
are difficult for humans to maneuver in, automated
surveillance and security, automated agriculture and
domestic applications, etc. In each of these appli-
cations, the operations performed by the robots to
achieve the desired objective are abstracted as tasks.
A central problem in multi-robot systems is to solve
the multi-robot task allocation problem (MRTA) -
how to find a suitable assignment of tasks to robots
so that the tasks performed by the robots can be com-
pleted in an efficient manner in terms of time and
energy expended by the robots. We consider a cat-
egory of MRTA problems called ST-MR-TA (single
task robot, multi-robot tasks, time extended assign-
ment) (Gerkey and Matari´c, 2004), where ST stands
for single-task robots, i.e., each robot is able to ex-
ecute as most one task at a time, MR means multi-
robot tasks, tasks that require multiple robots to be
completed, and TA means time-extended assignment,
problems where the information to allocate tasks to
robots arrives over time. As a motivating application
of such an MRTA problem, we consider a multi-robot
landmine detection scenario. A task in this scenario
corresponds to a certain number of robots visiting the
location of a potential landmine, not necessarily at the
same time, to analyze the object using the robots’ sen-
sors. The location of potential landmines arrives dy-
namically and is made available to the robots. MRTA
in such a scenario correspondsto the multi-city travel-
ing salesman problem that has been shown to be NP-
hard (Miller et al., 2006) (Dasgupta, 2011). Previ-
ous work in MRTA for ST-MR-TA problem consid-
ers local or market-based heuristics. In this paper,
we propose to use a stochastic model called stochastic
queueing to address the MRTA problem (Huang and
Serfozo, 1999). Using spatial queueing is attractive
for our ST-MR-TA MRTA problem as it provides a
formal framework for distributed decision making by
the robots so that they can respond efficiently to dy-
namic changes in the task distribution. We compare
the performance of the spatial queueing MRTA algo-
rithm with a greedy MRTA algorithm based on the
distance to reach tasks. We have validated our algo-
rithm on the Webots simulator using a wheeled robot
called Corobot for different numbers of robots and
tasks. Our experimental results done with Corobot
robots on the Webots
c
simulator for spatially dis-
tributed task allocation scenario show that teams of 5
and 10 robots using the stochastic queuing algorithm
256
Muñoz-Meléndez A., Dasgupta P. and Lenagh W..
A Stochastic Queueing Model for Multi-robot Task Allocation.
DOI: 10.5220/0004049102560261
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 256-261
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

perform less useless movements that result in shorter
traveled distances and completion time compared to
the robots using the greedy algorithm.
2 RELATED WORK
The problem of MRTA has been investigated us-
ing different techniques (Gerkey and Matari´c, 2004;
Mataric et al., 2003), and, recently with market-based
approaches (Dias et al., 2006). One of the earliest sys-
tems using for MRTA was the M+ system (Botelho
and Alami, 1999). In (Gerkey and Matari´c, 2004)
a widely accepted taxonomy for MRTA problems is
provided. The problems are classified along three
dimensions: (a) single task robots (ST) vs. multi-
task (MT) robots, related to the parallel task perform-
ing capabilities of robots, (b) single robot (SR) task
versus multi-robot (MR) tasks, related to the num-
ber of robots required to perform a task, and, (c) in-
stantaneous assignment (IA) versus time extended as-
signment (TA), related to the planning performed by
robots to allocate tasks. Mataric et al. compare per-
formance of robots teams using auction-based strate-
gies for coordination and commitment and report that
the least time is required to complete all tasks (put
out all alarms) when the robots are allowed to coor-
dinate their plans with each other as well as to dy-
namically change their plans (Mataric et al., 2003).
The traderbots approach by (Dias, 2004) uses multi-
round, single-item auctions for dynamic task alloca-
tion across multiple robots, while in (Jones et al.,
2006) the traderbots approach is augmented using
the Skill, Tactics, Play (STP) approach for coordi-
nated teamwork. The MRTA problem has also been
approached as an exploration problem of matching
a set of robots to a set of targets using an algo-
rithm called PRIM-ALLOCATION (Lagoudakis et al.,
2005). Zlot and his team havealso used auction-based
algorithms for multi-robot task allocation (Zlot, 2006;
Jones et al., 2011). The MRTA problem has also been
combined with techniques from multi-agent coordi-
nation and optimization techniques such as negotia-
tion (Viguria et al., 2007), coalition formation (Tang
and Parker, 2007), reinforcement learning (Schneider
et al., 2005), vector regression learning (Jones et al.,
2006), Hungarian algorithm (Liu and Shell, 2011),
vacancy chains (Dahl et al., 2009), and dynamic vehi-
cle routing (Bullo et al., 2011) to improve the perfor-
mance of the robots and deal with uncertainty.
3 PROBLEM FORMULATION
Our MRTA model is based on spatial queueing the-
ory. Probability and queueing approaches provide an
attractive formalism to model settings where multi-
ple targets have to be kept under surveillance by mul-
tiple mobile units in applications such as automated
surveillance, automated reconnaissance, etc. In the
queueing model, the requirement of an operation by a
robot on or at a target is referred to as a demand corre-
sponding to that target. In our model, the demands at
different targets are generated stochastically depend-
ing on the availability of target. A solution to the
problem consists of each robot calculating an ordered
sequence of demands based on the costs to process de-
mands while minimizing certain metrics such as the
distance traveled by the robots to process demands,
or, the waiting/idle time for targets. When the spatial
distribution of demands(targets) in the environment
is known, a queueing approach can be enriched by
applying a spatial framework. These systems gener-
ally evolve over time as Markovian processes and the
robots select tasks according to a Markovian mecha-
nism.
Let E ⊂ R
2
represent a bounded 2-D environment
and R = {r
i
: 1 ≤ i ≤ m} represent a set of m mo-
bile robots that are deployed within E. p
r
i
(t) ∈ E de-
notes the position of robot r
i
at time t. There are n
stationary targets distributed within the environment.
Each target requires a subset of robots in R to oper-
ate upon it. The set of operations performed by dif-
ferent robots on a target is referred to as a task. Let
T = {τ
i
: 1 ≤ i ≤ n} represent a set of tasks. Each
task τ
i
is associated with four attributes: its position
in the environment p
τ
i
∈ E, a demand value nd
τ
i
∈ Z
that denotes the number of robots that need to operate
on the task to complete it, a progress value ad
τ
i
∈ Z
that denotes the number of robots that have already
serviced the task, and, a Boolean availability value
avail
τ
i
denoting whether the task is currently being
serviced by a robot and is consequently unavailable.
Let T
open
= {τ
i
∈ T : ad
τ
i
< nd
τ
i
}, T
closed
= T \ T
open
,
and, T
avail
= {τ
i
∈ T
open
:avail
τ
i
= true} represent the
sets of open, closed and available tasks respectively.
d
ij
=|| p
τ
i
− p
τ
j
|| is the Euclidean distance between
tasks τ
i
and τ
j
and
ˆ
d
ij
=|| p
r
i
(t) − p
τ
j
|| is the Eu-
clidean distance between robot r
i
at time t and task
τ
j
. When a robot reaches the location of a task, one
unit of the task’s demand is processed and its progress
increases by 1. A task is completed when its progress
matches its demand, i.e., when ad
τ
i
= nd
τ
i
.
We represent the probability of a robot to select
task τ
j
after it has serviced task τ
i
as an inter-task
transition matrix M
τ
given by:
AStochasticQueueingModelforMulti-robotTaskAllocation
257

M
τ
=
π
11
π
12
... π
1n
π
21
π
22
... π
2n
...
π
n1
π
n2
... π
nn
, (1)
where π
ij
=
1
d
ij
∑
j6=i
1
d
ij
is the inverse of the Euclidean
distance between tasks τ
i
and τ
j
normalized over all
tasks. Note that
∑
i
π
ij
= 1. Also, since a robot needs
to service a task’s demand at most once, π
ii
= 0.
Using this inter-task transition matrix, a robot has a
higher likelihood of selecting available tasks that are
closer than those that are further away.
The problem facing robot r
i
is to select a task τ us-
ing the probabilities in the inter-task transition matrix.
However, selecting the probabilities from M
τ
does not
incorporate the dynamic nature of the system man-
ifested through robots servicing and accomplishing
tasks. Therefore, each robot r
i
maintains a local copy
of M
τ
denoted by M
τ,r
i
and updates it using its own
task servicing information. When a robot services a
demand of task τ
j
, it sets the column j in M
τ,r
i
corre-
sponding to task τ
j
to zero, to indicate that it will not
service demands from task τ
j
in the future and con-
sequently, not include τ
j
in making its decisions. To
select tasks, each robot r
i
represents its probability of
selecting a task at time t as a vector state matrix V
r
i
,
robot r
i
’s initial vector state, V
r
i
(0), is given by:
V
r
i
(0) =
ˆ
π
i1
ˆ
π
i2
...
ˆ
π
in
, (2)
where
ˆ
π
ij
=
1
ˆ
δ
ij
∑
j6=i
1
ˆ
δ
ij
is the inverse of the Euclidean dis-
tance between robot r
i
’s initial location and the loca-
tion of task τ
j
, normalized over the distances of r
i
to
all tasks.
V
r
i
is updated using the equation:
V
r
i
(t) = V
r
i
(t − 1) × M
τ,r
i
(t) (3)
Robot r
i
makes a decision about the next task to
process by selecting a next task according to the high-
est probability of tasks in V
r
i
(t). Since the robots se-
lect tasks in a distributed manner, more than one robot
end up selecting the same task. In that case, the task
is allocated to the robot with the higher probability
of performing the task. If more than one robot have
the same probability, the task is allocated to the robot
with the highest identifier.
From the probabilities in V
r
i
(t) a robot can order
a queue of open tasks at time t, Q
r
i
(t) ⊆ V
r
i
(t), ac-
cording to the probabilities of the tasks. The values
of Q
r
i
, corresponding to the original values
ˆ
π
ij
sorted
in descending order, represent the set of current alter-
natives for robot r
i
at time t, as expressed in Equation
4. Note that q
1r
i
∈ Q
r
i
represents the first option for
robot r
i
. The stochastic queue represents, at the same
time, a negotiation tool to apply in case of conflicts
generated in task selection by other robots.
Q
r
i
(t) =
q
1r
i
,q
2r
i
,. .., q
n(t)r
i
: q
jr
i
≥ q
j+1 r
i
∧
τ
j
∈ T
open
(4)
4 STOCHASTIC QUEUEING
BASED ALGORITHM FOR
MRTA
The algorithm provides robots a mechanism for sort-
ing prospective tasks according to the available knowl-
edge. Prospective tasks are arranged in a queue of
probabilities Q
r
i
(t) that represents the list of preferred
tasks to be serviced by robot r
i
as described in Section
3. The procedure applied for robots to allocate tasks
demands is summarized in Algorithms 1 and 2.
The environment is explored applying transition
matrix M
τ
and vector states of the robot V
r
i
(0) and
V
r
i
(t) calculated from the spatial distribution of tasks
and location of robot, as expressed in Eqs. (1) - (2),
see lines 3-16 of Algorithm 1.
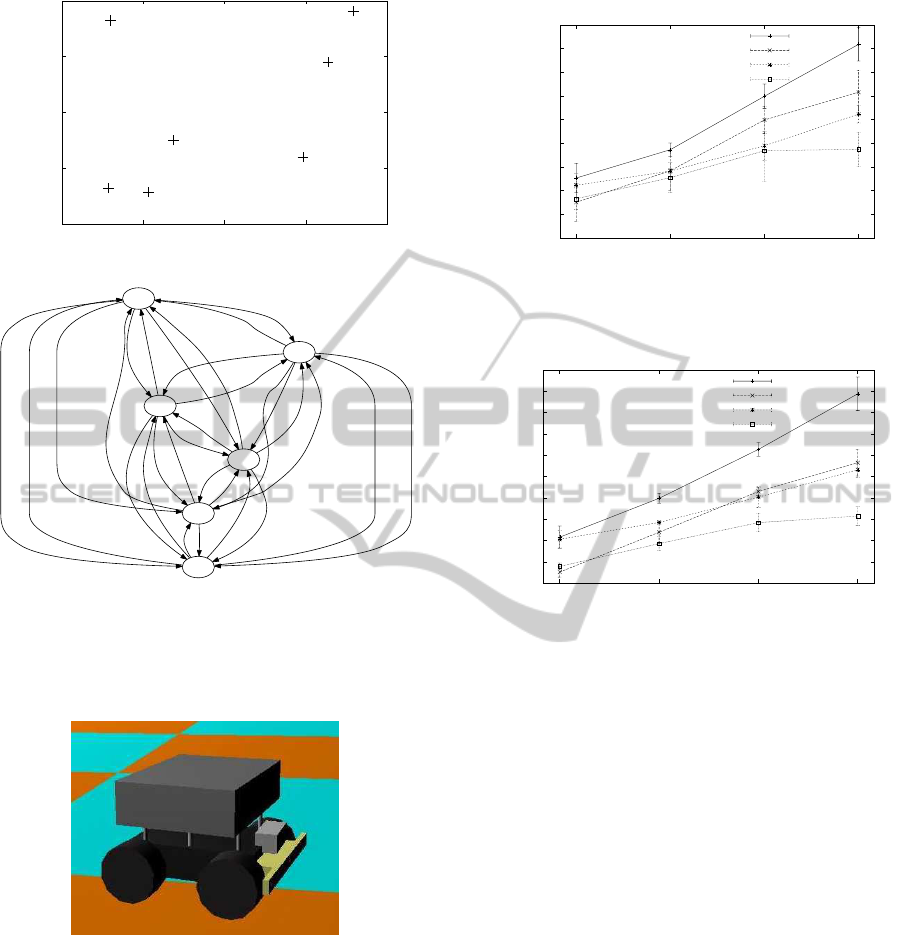
Figure 1 illustrates the graph based on the transition
probabilities calculated using an environment compris-
ing 6 tasks.
5 EXPERIMENTAL RESULTS
The stochastic queueing based algorithm was com-
pared with a greedy algorithm under identical scenar-
ios of tasks service. In our greedy approach incom-
ing requests of service are released by a call center to
the robot team, and tasks are allocated to the nearest
available robot, on a first-come first-served basis. The
greedy algorithm allocates tasks to robots based on the
distance between robots and demands as the first crite-
rion, and as a second criterion in the numerical identi-
fier of robots to solve eventual conflicts that cannot be
solved by the former. In the stochastic approach robots
receive a copy of the list of tasks and estimate locally
the transition probabilities, vector state and queue of
lists to service.
Since this research focuses on task allocation we do
not deal with localization or path planning issues. We
assume a robot is able to reach the point in the environ-
ment where a demand of service is active.
We conducted a set of experiments using simulated
robots in the Webots
c
environment. We used three
robot teams with 5 and 10 robots, with a varying num-
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
258

Algorithm 1: Stochastic Queueing based Task Allocation.
Input: set of tasks, T; current position of the robot, p
r
i
.
Local variables: list of open tasks, T
open
; list of avail-
able tasks T
avail
; list of non inspected tasks for robot r
i
,
T
non−insp
; transition probability matrix, M
τ
; vector state of
the robot, V
r
i
(t); subsequent vector state of the robot,V
r
i
(t+
1); list of open available tasks selected by robot r
i
, Qt
r
i
(t);
list of probabilities of tasks in Qt
r
i
, qp
r
i
; boolean result of an
allocation, talloc.
1: begin
2: Initialize τ
k
.ad ← 0 ∀τ
k
∈ T.
3: Calculate T
open
← {τ
k
} : τ
k
.ad < τ
k
.nd ∀τ
k
∈ T
4: Calculate T
avail
← {τ
k
} : p
t
k
6= p
r
j
∀τ
k
∈ T
open
∧ ∀r
j
∈
R
5: Calculate T
non−insp
← {τ
k
} : τ
k
.ad = 0 ∀τ
k
∈ T
open
6: Calculate the transition matrix M
τ
from T, applying Eq.
(1).
7: Calculate the initial state vector of robot r
i
,V
r
i
(0), using
p
r
i
, coordinates of tasks in T, and the next state vector
V
r
i
(1), applying Eqs. (2) and (3).
8: Build a queue of preselected tasks Q
r
i
(t) with probabil-
ities qp
r
i
from V
r
i
(1), applying Eq. (4).
9: while T
non−insp
6=
/
0 do
10: talloc ← SelectOneTask(T
open
,qt
r
i
,qp
i
i
).
11: if talloc = true then
12: Remove the serviced tasks from the local copy of
T and recalculate T
τ
.
13: Update the set of current open tasks T
open
.
14: Update V
r
i
(t) and V
r
i
(t + 1) considering the cur-
rent position of the robot and applying Eqs. (2)
and (3).
15: Build a queue of preselected tasks Q
r
i
(t) with
probabilities qp
r
1
from V
r
i
(t + 1), applying Eq.
(4).
16: end if
17: end while
18: end
ber of tasks from 6, 12, 18 and 24. The robot model
used in these experiments is based on the Coroware
CoroBot robot, illustrated in Figure 2. It is equipped
with a four-wheel drive base and four infra-red sen-
sors, two located in the front and two on the sides of the
robot, for avoiding collisions, and a GPS for localiza-
tion. The maximum speed at which a robotcan travel is
0.8m/s. The robots are able to communicate wirelessly
within the environment that measures 20m× 20m. We
assume reliable communication.
The simulations were run on Webots 6.3.0 on Win-
dows 7. The location of tasks and robots were gen-
erated randomly applying a uniform distribution. The
number of demands for each task is a random num-
ber between 3 and 5. Since each task represents an
inspection site for ground landmines, one task cannot
be serviced twice by the same robot. The problem is
considered solved if all the tasks have been inspected
the associated number of demands.
We compare the performance of robot teams rely-
ing on both methods, greedy and stochastic in terms of
two metrics: completion time and distance. The men-
Algorithm 2: SelectOneTask (T,T
open
,qt
r
i
,qp
r
i
).
Input: set of tasks; T; set of open tasks, T
open
; list of open
tasks selected by robot r
i
, qt
r
i
; list of probabilities of tasks
in qt
r
i
, qp
r
i
.
Output: boolean value, talloc.
Global variables: set of robots R.
Local variables: float: max qp
1
; list of robots: Ω.
Functions: max(x
1
,... , x
n
) returns the maximum
value of the set {x
1
,... , x
n
}; id(r
i
) returns i.
1: begin
2: Select the first open task from qt
r
i
, qt
1r
i
3: Broadcast qt
1r
i
and qp
1r
i
.
4: if qt
1r
i
6= qt
1r
j
,∀r
j
∈ R : r
j
6= r
i
then
5: qt
1r
i
is allocated to robot r
i
.
6: talloc ← true (there are no conflicts)
7: else
8: if qp
1r
i
> qp
1r
j
∀r
j
∈ R : r
j
6= r
i
∧ qt
1r
j
= qt
1r
i
then
9: qt
1r
i
is allocated to robot r
i
.
10: talloc ← true (r
i
has the highest probability to
reach the task).
11: else
12: max qp
1
← qp
1r
k
: qp
1r
k
> qp
1r
j
∧qt
1r
k
= qt
1r
j
=
qt
1r
i
∀r
k
,r
j
∈ R.
13: if qp
1r
i
= max p
1
then
14: Ω ← {r
j
} ∀r
j
∈ R : r
j
6= r
i
∧ qt
1r j
= qt
1ri
∧
qp
1r
j
= max qp
1
.
15: if Ω 6=
/
0 then
16: if id(r
i
) = max(id(r
1
),... , id(r
x
)) : r
x
∈ Ω
then
17: qt
1r
i
is allocated to robot r
i
, the robot
with the highest id.
18: else
19: talloc ← f alse (qt
1r
i
is allocated to a
robot in Ω with an id higher than id(r
i
)).
20: end if
21: else
22: talloc ← false (r
i
/∈ Ω, qt
1r
i
is allocated to
a robot with better probability to reach it).
23: end if
24: else
25: talloc ← false (qt
1r
i
is allocated to a robot
with better probability to reach it).
26: end if
27: end if
28: end if
29: if talloc = true then
30: Update state of allocated task qt
1r
i
in T and broad-
cast information.
31: Service task qt
1r
i
and update qt
1r
i
.ad in T.
32: Remove qt
1r
i
and qp
1r
1
from qt
r
i
and qp
r
i
.
33: Update state of qt
1r
i
T, and content of T
open
and
broadcast information.
34: else
35: Remove qt
1r
i
and qp
1r
1
from qt
r
i
and qp
r
i
.
36: end if
37: return talloc.
38: end
tioned metrics were averaged across 5 runs of each
set of settings. Environments are selected from a set
AStochasticQueueingModelforMulti-robotTaskAllocation
259
5
10
15
20
5 10 15 20
Y
X
τ6
τ1
τ2
τ3
τ4
τ5
Tasks
(a)
t1
t2
0.17
t3
0.24
t4
0.26
t5
0.12
t6
0.21
0.11
0.07
0.22
0.09
0.52
0.29
0.15
0.22
0.19
0.16
0.18
0.25
0.13
0.13
0.30
0.17
0.19
0.21
0.25
0.18
0.12
0.48
0.07
0.25
0.08
(b)
Figure 1: Example of environment containing 6 tasks, the
values on the axes represent meters (a), and corresponding
transition matrix (b) based on the extrapolation of inverse
distances between pairs of tasks.
Figure 2: Corobot robot simulated in the environment We-
bots.
of 30 environments previously generated. Algorithms
are tested under identical conditions.
Completion time is the time in the simulation
when all the tasks are completed. This metric, plot-
ted in Figure 3, indicates how long it takes to the
robot team inspecting the environment. Note that, in
general, robots using the stochastic algorithm invest
less time to completedemands of inspection than their
partners using the greedy algorithm.
The distance traveled by robots to service tasks is
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
6 12 18 24
Time (ticks)
Number of Tasks
Average Completion Time
GREEDY: 5 robots
10 robots
STOCHASTIC: 5 robots
10 robots
Figure 3: Average Completion Time.
20
40
60
80
100
120
140
160
180
200
220
6 12 18 24
Distance (m)
Number of Tasks
Average Distance
GREEDY: 5 robots
10 robots
STOCHASTIC: 5 robots
10 robots
Figure 4: Average Distance.
also considered in this comparison, and it is shown
in Figure 4. This plot shows how the time invested
by robots when selecting tasks has a positive effect
in their decisions, and that the greedy approach can
face drawbacks when dealing with complex environ-
ments in terms of number of robots and tasks. Re-
garding the distance the robots using the stochastic
algorithms travel up to 50% less that their partners
using the greedy algorithm, and that happens again in
the scenarios using 18 and 24 tasks.
6 CONCLUSIONS AND
PERSPECTIVES
One stochastic queueing based algorithm for task al-
location for robot teams is presented and compared
with a simple greedy algorithm in terms of comple-
tion time and distance. These algorithms have been
tested in a scenario of landmine detection where the
inspection points are modeled as tasks that are ser-
viced by different robots a number of demands.
In the near future, we plan to conduct experi-
ments in dynamic scenarios where information of
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
260

some tasks is available a priori, but also information
of new tasks arrives on-line, and is shared and in-
tegrated by robots in their decision making process.
The stochastic queueing algorithm already recalcu-
lates a transition matrix probability during the explo-
ration of the environment in one sense, by shrinking
the alternatives for the robot. A similar procedure will
be investigated to renormalize and extend the transi-
tion probability matrix.
We also plan to extend our algorithms for scenar-
ios in which heterogeneousrobots select tasks accord-
ing to their skills, that represent different sensing ca-
pabilities for identifying objects of interest. Finally,
we are working on the implementation of MRTA al-
gorithms for a team of physical robots for landmine-
like object detection.
REFERENCES
Botelho, S. and Alami, R. (1999). M+: A scheme for multi-
robot coopeation through negotiated task allocation
and achievement. In Proc. Int. Conf. on Robotics and
Automation, pages 1234–1239, Detroit, MI.
Bullo, F., Frazzoli, E., Pavone, M., Savla, K., and Smith, S.
(2011). Dynamic vehicle routing for robotic systems.
In Proc. of the IEEE, volume 99, pages 1482–1504.
Dahl, T., Matari´c, M., and Sukhatme, G. (2009). Multi-
robot task allocation algorithm based on vacancy
chain scheduling. Robotics and Autonomous Systems,
57(6-7):674–687.
Dasgupta, P. (2011). Multi-robot task allocation for per-
forming cooperative foraging tasks in an initially un-
known environment. In Jain, L., editor, Innovations
in Defense Support Systems - 2, pages 5–20. Springer-
Verlag.
Dias, M. (2004). TraderBots: A New Paradigm for Ro-
bust and Efficient Multirobot Coordination in Dynam-
ics Environments. PhD thesis, The Robotics Institute,
Carnegie Mellon University.
Dias, M. B., Zlot, R., Kalra, N., and Stentz, A. (2006).
Market-based multirobot coordination: a survey and
analysis. In Proceedings of the IEEE, Special Issue on
Multirobot Systems, volume 94, pages 1257– 1270.
Gerkey, B. and Matari´c, M. (2004). A formal analysis
and taxonomy of task-allocation in multi-robot sys-
tems. The International Journal of Robotics Research,
23(9):939–954.
Huang, X. and Serfozo, R. (1999). Spatial queueing
processes. Mathematics of Operations Research,
24(4):865–886.
Jones, E., Browning, B., Dias, M., Argall, B., Veloso, M.,
and Stentz, A. (2006). Dynamically formed hetero-
geneous robot teams performing tightly coordinated
tasks. Proceedings of the International Conference on
Robotics and Automation.
Jones, E., Dias, M., and Stentz, A. (2011). Time-extended
multi-robot coordination for domains with intra-path
constraints. Autonomous robots, 30(1):41–56.
Lagoudakis, M., Markakis, V., Kempe, D., Keskinocak,
P., Koenig, S., Kleywegt, A., and Tovey, C. (2005).
Auction-based multi-robot routing. In Proc. of the In-
ternational Conference on Robotics: Science and Sys-
tems, pages 343–350, Boston, MA.
Liu, L. and Shell, D. (2011). Assessing optimal as-
signment under uncertainty: An interval-based algo-
rithm. The International Journal of Robotics Re-
search, 30(7):936–953.
Mataric, M., Sukhatme, G., and Ostergaard, E. (2003).
Multi-robot task allocationin uncertain environments.
Autonomous Robots, 14:255–263.
Miller, D., Dasgupta, P., and Judkins, T. (2006). Dis-
tributed task selection in multi-agent based swarms
using heuristic strategies. In SAB’06 Proceedings of
the 2nd international conference on Swarm robotics,
pages 158–172. Springer-Verlag.
Schneider, J., Apefelbaum, D., Bagnell, D., and Simmons,
R. (2005). Learning opportunity costs in multi-robot
market based planners. In Proceedings of the Interna-
tional Conference on Robotics and Automation, pages
1151 – 1156, Barcelona, Spain.
Tang, F. and Parker, L. (2007). A complete methodology for
generating multi-robot task solutions using asymtre-
d and market-based task allocation. In Proceedings
of the International Conference on Robotics and Au-
tomation, pages 3351–3358, Rome, Italy.
Viguria, A., Maza, I., and Ollero, A. (2007). Set: An al-
gorithm for distributed multirobot task allocation with
dynamic negotiation based on task subsets. In Pro-
ceedings of the International Conference on Robotics
and Automation, pages 3339–334, Rome, Italy.
Zlot, R. (2006). Complex Task Allocation for Multi-robot
Teams. PhD thesis, Carnegie Mellon University.
AStochasticQueueingModelforMulti-robotTaskAllocation
261
