
Autonomously Traversing Obstacles
Metrics for Path Planning of Reconfigurable Robots on Rough Terrain
Michael Brunner, Bernd Br
¨
uggemann and Dirk Schulz
Unmanned Systems Group of the Fraunhofer Institute for Communication, Information Processing and Ergonomics FKIE,
Wachtberg, Germany
Keywords:
Metric, Traversability, Obstacle, Rough Terrain, Reconfigurable Chassis, Motion Planning, Mobile Robot,
Autonomy.
Abstract:
The fixed chassis design of commonly employed mobile robots restricts their application to fairly flat environ-
ments, as the wheel diameters or the track heights impose hard limits on their mobility. Unstructured outdoor
and urban environments alike comprehend many different invincible obstacles for most of those systems, like
stairs, boulders or rubble. However, there are mobile robots with reconfigurable chassis providing a higher
degree of mobility and enabling them to overcome such obstacles. Yet, current planning algorithms rarely ex-
ploit those enhanced capabilities, limiting these systems to the same environments as the fixed chassis robots.
This paper focuses on the metrics used by our motion planner. The employment of a two-stage planning ap-
proach allows us to use different cost functions for the initial path search and the detailed motion planning
step. The purpose of the initial search is to quickly find a fast environment-driven path to the goal. Hence,
it uses fast computable heuristics to assess the drivability, i.e. a risk quantification and the utmost operation
limits of the robot model. The detailed planning step determines the desired robot configurations. For this
purpose, we consider the actuator controls, the system’s stability, an estimate of the traction, and the driving
speed in addition to the quantities used in the first stage.
We present experiments to illustrate the influence of the safety weights and real world experiments which
prove the validity and feasibility of the metrics used by our motion planning algorithm.
1 INTRODUCTION
Fixed chassis robot platforms are commonly used to-
day. These platforms are limited to fairly flat areas, as
their design prevents them from traversing structures
with high edges or steep inclinations. Unstructured
outdoor and urban environments alike include many
different invincible obstacles for most of those robotic
systems, like stairs, boulders or debris. However, mo-
bile robot with reconfigurable chassis exist. Altering
the system configuration enhances the mobility of the
robot and enables it to traverse a wide variety of ob-
stacles, which would be insuperable otherwise.
To drive a mobile robot across the above men-
tioned obstacles is a challenging task even for a
trained operator. There are many aspects which have
to be considered when driving over obstacles, most of
which can be neglected for 2D navigation on flat ter-
rain. Especially, the stability of the robot is essential
as the robot falls over more easily. Inertia and mo-
mentum are increasingly important when a fast robot
is operated close to its limits. Moreover, varying con-
Figure 1: The Telemax robot model, a tracked platform with
four actuators, enabling the system to overcome more com-
plex obstacles than many other robot systems.
tact points of the mobile system change the system’s
behavior to actuator and driving commands.
Introduced planning and controlling algorithms
for traversing rough terrain or overcoming obstacles
depend heavily on the robot’s shape, actuators, and
abilities. This may be comprehensible by considering
that these systems ought to traverse very rough terrain
for which they must operate at their limits. This, in
turn, requires to exhaust the often unique capabilities
58
Brunner M., Brüeggemann B. and Schulz D..
Autonomously Traversing Obstacles - Metrics for Path Planning of Reconfigurable Robots on Rough Terrain.
DOI: 10.5220/0004033400580069
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 58-69
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

given by their specific actuators. However, more gen-
eral algorithms often apply only to a subset of robots
as the designs of mobile robots differ vastly and use
specific mechanisms for obstacle traversal.
We developed a two-stage motion planning ap-
proach for reconfigurable robots to traverse rough, un-
structured outdoor environments as well as to over-
come obstacles in urban surroundings. We generate a
preliminary path using the platform’s operating limits
instead of the complete robot state and, subsequently,
we apply a detailed motion planning step to refine the
initial path in rough regions. Our algorithm is gen-
eral in the sense that we do not rely on predefined
motion sequences or obstacle classifications. Further-
more, our algorithm can be used with different robot
models if given a model that can be queried for stabil-
ity.
The metrics used by our motion planner are at the
center of this paper. Many different metrics and cost
functions are proposed for path planning in 2D nav-
igation as well as for rough terrain traversal. Some
quantities, like time or path length, are applicable to
both scenarios. In 2D navigation, aspects like sta-
bility, traction or risk are usually neglected because
they can safely be assumed. In contrast, quantifying
these aspects during planning on rough terrain is es-
sential. In our approach, we use a risk assessment to
adjust the robot’s actions. If performed solely, actua-
tor movements do not increase the path length, thus,
we measure the path execution time to account for
these actions. In rough areas we resort to often em-
ployed quantities, e.g. stability or traction, and incor-
porate them as costs into our approach to determine
appropriate robot configurations.
The remainder of this paper is structured as fol-
lows: section 2 provides an overview of some related
work. In section 3 we describe the robot model used
for this work. We give a brief scheme of our algo-
rithm in section 4. Section 5 discusses issues of the
sensor coverage for obstacle traversal, the necessity
of global information, and introduces the risk assess-
ment. Sections 6 and 7 illustrate the metrics used for
the initial path search, and the metrics utilized by the
detailed planner in hazardous areas, respectively. We
provide an evaluation of the safety weights and real
world experiments in section 8 and conclude in 9.
2 RELATED WORK
Extensive work has been done on traversability met-
rics and cost functions for path planning of mobile
robots. A binary notion of traversability and the path
length are generally accepted as sufficient measures
in 2D navigation. However, as the terrain becomes
more challenging, more detailed traversability assess-
ments are used and further aspects, like the stability,
the amount of turning, or traction are considered dur-
ing path planning. In this section we outline some of
the previous work done in this area of research.
The National Institute of Standards and Technol-
ogy (NIST) has introduced stepfields as a means of
repeatable test methods for robot mobility to capture
statistically significant performance information (Ja-
coff et al., 2008). The NIST also proposed three met-
rics for stepfields; two concerning the coverability of
the terrain, i.e a difficulty measure of the entire re-
gion, and one called crossability which depicts the
difficulty to move between two specified locations.
While the coverability is based on the variations in
height difference, the crossability is given by the least
cost path in terms of the terrain roughness along the
path, the amount of turning and the path length. All
metrics are scaled by the robot size and wheel diam-
eter or track height since these parameters influence
the ability of the robot to overcome obstacles (Molino
et al., 2007). The NIST’s crossability metric is based
on (Iagnemma and Dubowsky, 2004) where the same
quantities are used to include the robot model into
the traversability measure. Since we intent to use the
traversability measure to guide our search algorithm,
a global definition like the coverability is not suitable.
Similarly, we consider roughness, the amount of turn-
ing and the path length for planning. In contrast, since
the robot size and wheel or track height are not fix for
robots with reconfigurable chassis, we do not include
these parameters. Further, we measure the execution
time of a path rather than the path length to account
for actuator movements which do not influence the
path length, but require time.
In the area of planetary rovers most of the pro-
posed traversability concepts are heavily based on ter-
rain, robot and dynamic models to capture the terrain-
vehicle interactions in detail (Howard and Kelly,
2007). Mechanical models are used to identify the
cohesion and internal friction angles of the terrain
in order to quantify traversability (Iagnemma et al.,
2004). The Traversability Index is a fuzzy rule-based
measure quantifying the slope of the terrain and the
roughness with respect to the size and density of rocks
within the camera frame (Seraji, 1999). It was ex-
tended in (Howard et al., 2001), additionally incorpo-
rating the terrain discontinuity (i.e. cliffs) and hard-
ness as it affects traction. In our approach we also
incorporate an estimate of the vehicle traction, how-
ever, it is less model based.
Many different stability margins were proposed
for measuring the stability of a mobile robot. A
AutonomouslyTraversingObstacles-MetricsforPathPlanningofReconfigurableRobotsonRoughTerrain
59

comparative overview can be found in (Garcia et al.,
2002). A common way to measure the static stability
of a system is to project the center of mass onto the
supporting polygon. Other stability margins are more
accurate as they consider the height of the center of
mass. In (Miro et al., 2010) the Force-Angle Stabil-
ity Margin (FASM) is incorporated as slowness value
into the Fast Marching Method (FMM) to favor more
stable paths. As we do not contemplate any forces
at this point we use the Normalized Energy Stability
Margin (NESM) (Hirose et al., 2001), also employed
in (Magid et al., 2008).
Others classify the environment using fuzzy rules
and Markov Random Fields to generate so called be-
havior maps which encode preconditions and costs
for a skill-based traversal algorithm (Dornhege and
Kleiner, 2007). Or they label the terrain through ge-
ometric heuristic rules as flat, vertical, stairs or un-
known along with associated costs (penalizing steep
slopes and rough terrain) to apply specific motion
primitive planners for each class (Rusu et al., 2009).
However, we do not want to base our motion plan-
ning algorithm on a structure classification scheme as
this will limit the algorithm to the set of defined struc-
tures. Hence, our metrics solely use general proper-
ties, rather than semantic structure labels.
3 ROBOT PLATFORM
We use a Telerob Telemax robot model in our re-
search, see figure 1. The robot is 60cm long, 40 cm
wide, and weighs about 70kg. It has 4 tracks which
can be rotated 170
◦
from entirely hinged all the way
down lifting the robot about 45 cm up. Completely
stretched the robot has a length of 120 cm. The robot
is equipped with a skid-drive, and its maximal trans-
lational speed is 1.2
m
s
.
4 BRIEF ALGORITHM
OVERVIEW
In this section we give a short overview of our algo-
rithm. We employ a two-stage planning algorithm for
reconfigurable robots to traverse rough environments
and to overcome obstacles in urban areas. Given a
map we first compute the risk distribution (section
5) and build a motion graph according to the robot’s
operating limits (section 6). We perform a Dijkstra
search to find the initial path in this motion graph.
Afterwards, we identify the path segments leading
through rough terrain and construct a state graph for a
tube-like area around each rough path segment (sec-
tion 7). Using a Dijkstra search we find sequences of
robot states including the desired actuator positions.
Finally, applying a default configuration for segments
in flat areas, all segment paths are combined to pro-
vide the final path.
5 MAP AND RISK
DISTRIBUTION
Whether a given structure is traversable or not, is not
easily determined. In 2D navigation, this is usually
handled with a simple threshold on the height differ-
ences; everything above this threshold is invincible.
When aiming at overcoming structures, this question
becomes very hard to answer. For 2D navigation a 2D
laser range finder is sufficient to gather the necessary
information about the surroundings. In contrast, us-
ing a 3D sensor for traversing obstacles and navigat-
ing through rough environments is not enough, due to
the still very limited sensor coverage.
First, installing sensors on a mobile robot intro-
duces a very narrow view; second, determining what
will come after successfully climbing onto an obsta-
cle is very difficult when using common sensors; and
third, while traversing an obstacle the robot’s pose
will often orient the sensors in a way that they are un-
able to cover the environment. For example, consider
the traversal of a flight of stairs; the very narrow view
makes it hard to recognize the stairs especially all the
way up, and while on the stairs and close to the top
the sensors cover very few of the ground. This means,
deciding on the traversability of an obstacle based on
local sensor information is very hard. Therefore, we
came to the conclusion that traversing rough terrain
and obstacles cannot be addressed without global in-
formation like a map. Means of how to deduce the
traversability of a greater area from local sensor in-
formation is beyond the scope of this work.
Further, discovering that an obstacle is actually in-
vincible during traversal is an unpleasant situation. In
this case the robot may be on top of an obstacle and
be required to retreat backwards or, worse, since ob-
stacles are generally not traversable from every an-
gle, the robot may be stuck and, thus, unable to move
safely off the obstacle. A map may help reducing
such incidents but certainly cannot account for all sit-
uations, as a map usually is not detailed enough and
physical aspects, like friction coefficients, are gener-
ally unavailable.
Also related to the first point, especially for rough
environments it cannot be assumed that a path to a de-
sired goal exists at all. Moreover, a map allows to as-
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
60

sess the risk of a path and, thus, enables to determine
whether driving through a hazardous area is worth the
risk or circumventing the obstacle with reasonable ad-
ditional costs is more appropriate.
In addition, a map may be used to improve local-
ization by comparing the robot’s actual pose with the
expected pose deduced from the map. However, the
localization and an enhanced controller are subject to
future work.
Using a map for motion planning in rugged en-
vironments introduces another problem. The validity
of the planning is closely related to the level of detail
of the map. However, large detailed maps are rarely
available. This can be addressed by detailed patches
for rough regions and a greater coarse map.
5.1 Risk Distribution
In our approach we use a heightmap to represent the
environment because it is simple to use and sufficient
for our application. In order to assess the difficulty
of a position within the map, we use techniques from
image processing to compute a risk distribution of the
map. As indicator how difficult an area of the map
is, we use the height differences between cells. For
a given map cell c(x,y) we determine the maximal
height difference within a window w of size k
x
× k
y
around the cell, i.e., we apply a maximum filter
c(x,y) = max
(i
1
, j
1
),(i
2
, j
2
)∈w
x,y
{
|c(i
1
, j
1
) − c(i
2
, j
2
)|
}
with
w
x,y
=
{
(i, j) : |x − i| ≤ k
x
∧ |y − j| ≤ k
y
}
.
However, we prevent a distortion of the range of
values through a threshold h
max
, which conveniently
can be set to the robot model’s maximal traversable
height. Further, the values are scaled to [0,1] using
h
max
. Subsequently, we perform a Gaussian blur on
this grid of height differences to smooth the transi-
tions and, more importantly to propagate the risk, i.e.
inflate large heights and sharp edges. The Gaussian
kernel for a two dimensional blur is defined as
G(x,y) =
1
2πσ
2
e
−
x
2
+y
2
σ
2
.
Given kernel sizes of k
x
and k
y
for both dimen-
sions, this leads to a matrix G ∈ M(k
x
+1,k
y
+1) with
elements
G(i, j) =
1
2πσ
2
e
−
|
i−
k
x
2
|
2
+
j−
k
y
2
2
σ
2
,
where k
x
/2 and k
y
/2 indicate integer divisions. For
each cell in the map we convolve this kernel matrix
Figure 2: Risk distributions of two different maps; left of
a real map build by a laser range finder and right for an
artificial urban map. The risk of a region is based on the
height differences in this area. The roughness quantifica-
tion is used to control the planning process. The colors are
indicating the degree of risk, ranging from blue for flat re-
gions over green and yellow to red, high risk areas.
with the window of the same size around the cell. As
the height differences directly correspond to the risk
for the system, we call this smoothed grid of maximal
height difference a risk distribution. Figure 2 shows
the final risk distribution of some maps.
Note, comparing, for instance, a flight of stairs
to a ramp of the same gradient angle, the stairs pro-
vides less contact points for traversal with a tracked
robot, and turning is much more severe on these dis-
crete contacts. Hence, a flight of stairs should have
a higher risk compared to a ramp of the same gradi-
ent angle. Using the introduced formulation allows
us to distinguish between those two structures in ex-
actly this way. Moreover, using an appropriate win-
dow size allows us to virtually inflate the hazardous
areas, which is commonly done in 2D navigation to
keep the robot away from obstacles. In contrast, high
risk areas are avoided by the robot but if required, do
not prohibit traversal. Another benefit is that the com-
putation is simple and highly parallelizable.
We use this risk distribution in both metrics, for
the initial path search as well as for the detailed mo-
tion planning, to adjust the behavior according to the
difficulty of the environment.
6 METRICS FOR THE INITIAL
PATH SEARCH
Driving with reconfigurable robots on rough terrain
and over obstacles introduces a large search space and
more constraints compared to 2D navigation must be
satisfied. Additionally, the robot’s actuators must be
incorporated into the planning process and the quality
of the path must be judged not only by its length but
also by the robot’s stability and traction, the amount
of turning and time required for actuator movements.
We, therefore, employ a first path search to quickly
find an environment-driven and fast path to the de-
sired goal location. The path is subsequently used to
AutonomouslyTraversingObstacles-MetricsforPathPlanningofReconfigurableRobotsonRoughTerrain
61

restrict the search space for the second planning phase
which determines the final path consisting of the robot
configurations including the actuator commands.
Our initial path search employs the introduced risk
distribution. This roughness quantification is used to
steer the robot away from hazardous areas and to pre-
fer less risky routes. Usually, an environment consists
of fairly flat areas as well as rugged and challenging
parts. In flat areas, the consideration of the robot’s
complete configuration including actuator values is
not necessary. In contrast, it is essential in rough
areas to increase robot safety and ensure successful
traversal. At this planning phase, we do not know
through which parts of the environment the path will
lead, therefore, we omit the complete state during this
planning stage. We rather stick to the utmost operat-
ing limits of the mobile base neglecting the actuators.
These operation limits do include the maximal roll
and pitch angles before tipover as well as the maximal
traversable height. We identify the least restrictive op-
erating limits through the most stable configuration on
flat ground. However, using a greater set of configu-
rations generally improves the robot states in terms of
stability as more configurations can compensate for a
greater variety of situations.
We build a motion graph G
m
= (V
m
,E
m
) which
represents the ability of the mobile robot to traverse
the environment. The vertices v
i
∈ V
m
model posi-
tions p
i
of a dense
1
regular grid. A vertex v is added
to V
m
if the maximal risk value r within the robot’s
footprint does not exceed some threshold. If the tran-
sition from a position p
i
to a neighboring position p
j
does not violate the robot’s limits in terms of inclina-
tion and height differences, the edge e
i j
= (v
i
,v
j
) is
included in E
m
. Examples of motion graphs are given
in figure 3.
Using the risk distribution, we are able to define
the required time t
v
(i j) to move from a position p
i
to
a neighboring position p
j
as a simple function of the
risk. Let d
i j
be the distance between p
i
and p
j
, and
let r
i j
= max(r
i
,r
j
) be the higher risk of the involved
positions. Then t
v
is defined as
t
v
(i, j) =
d
i j
max(v
min
,(1 − r
i j
· w
is
) · v
max
)
, (1)
where v
min
and v
max
are the minimal and maximal for-
ward velocity, respectively. w
is
∈ [0, 1] is the safety
weight for the initial path search; low values will
diminish the influence of the risk distribution and,
hence, lead to possibly shorter, yet more risky paths.
1
The resolution of the grid is usually half the robot size
to avoid the requirement of intermediate validity test. Also,
situations in which solutions are lost due to the discretiza-
tion are few.
Figure 3: Examples of motion graphs for two different
maps; left for a map of a training hill and right for an ar-
tificial urban map. The motion graphs encode whether the
given robot model is able to traverse the terrain. Areas with
risk values and slopes below a convenient level are green,
areas with higher risk levels and convenient slopes are yel-
low, and areas with higher risk values and higher slopes are
orange.
Whereas, high values increasingly force the robot to
take low risk paths. Note, the less risky the area, the
faster the robot can drive and the shorter the time.
By using a graph based formulation and encoding the
costs in the edge weights, we are able to perform a
Dijkstra search.
The main purpose of this planning phase is to find
a path to the goal which can be used to restrict the
search space for the subsequent detailed motion plan-
ner. Therefore, we differentiate between areas with
risk values and slopes below a convenient level, ar-
eas with higher risk levels and convenient slopes, and
areas with higher risk values and higher slopes (see
figure 3).
We split the path into segments leading through
flat areas with low risk or no environmental slopes and
segments through rough regions with high risks and
slopes. See figure 4 for examples. For flat segments
the stability of the robot system can be safely assumed
as done in 2D navigation. Further, any robot configu-
ration may be applied with no or little risk (given the
pose is stable in itself). Therefore, we do not perform
a detailed motion planning of the robot’s actuator con-
figurations for flat segments. However, rough regions
require an additional planning of the robot’s actuator
controls and the consideration of the stability to en-
sure safety and task completion. This planning phase
and the metrics used are described in more detail in
section 7. In regions with higher risk values but still
convenient slopes we reduce the velocity of the robot.
Distinguishing between flat and rough areas dur-
ing this planning stage allows us to speed up planning
since we are avoiding unnecessary planning in a high
dimensional space for easily accessible parts of the
environment. However, we ensure the stability and
safety of the robot through a detailed planning step for
rough path segments. Disregarding the robot state and
using the operating limits simplifies the traversability
assessment, hence, the initial path search is fast.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
62
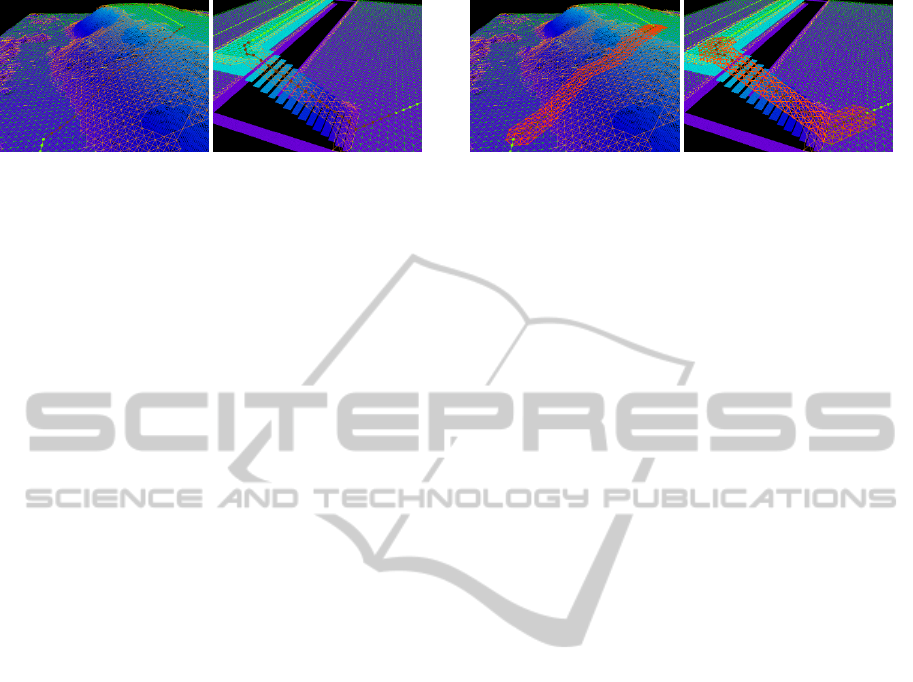
Figure 4: Path segments of the initial paths for two planning
queries on different maps. Segments through flat regions
which do not require further planning are shown in light
green, segments through rough regions will be refined in
the second planning phase and are shown in dark red.
7 METRICS FOR PLANNING IN
ROUGH AREAS
Compared to flat environments, driving on rough ter-
rain is more challenging and exposes the mobile robot
to a greater risk. Therefore, using simply the operat-
ing limits of the robot is not sufficient. We need to
consider the complete robot configuration including
actuator values to estimate the robot’s stability and
traction instead. The configuration of a reconfigurable
robot may look like
(x,y, z, θ, ψ,φ,v,ω, ˙v,
˙
ω,a
1
,...,a
n
),
where the first part describes the 6D pose of the robot.
The translational and rotational velocities are v and ω,
and the corresponding accelerations are depicted by ˙v
and
˙
ω. a
i
are the control values of n actuators. The
stability or the contact points with the environment
may also be included in this state. Reducing the state
vector to the controllable part leads to
(x,y, θ, v, ω, ˙v,
˙
ω,a
1
,...,a
n
).
The controllable states still build a large and high
dimensional search space, which cannot be searched
exhaustively. Sample-based methods are usually em-
ployed to handle high dimensional search spaces.
However, sample-based methods provide the first
sampled solution, i.e. not necessarily a optimal or
even good. Further, due to their random nature, those
methods struggle to find a solution if only a few exist
at all, i.e. they suffer from the narrow passage prob-
lem. Addressing the narrow passage problem and ap-
plying sample-based methods to optimal control is an
active field of research. Due to the fundamental is-
sues, we consider sample-based methods as not suited
for solving the problem of traversing rough terrain
and obstacles.
Consequently, we introduce a graph-based ap-
proach using the initial path as basis to restrict the
space of robot states to a tube around this path (see
Figure 5: Two examples of tubes (light red) around the ini-
tial paths in rough areas. The tubes are used to restrict the
search space of the detailed motion planning step.
figure 5). We, therefore, assume that the best path
with respect to the complete robot configurations
complies with or is close to the initial path. This as-
sumption mostly holds. It would be violated primarily
if time consuming actuator movements are necessary
by which no distance is gained. This rarely happens
since, first, we advocate simultaneous execution of
movements (as described later) and, second, the ini-
tial path prefers less risky routes which generally re-
quire less actuator movements. Finally, the best path
considering the robot’s entire configuration must also
be a fast path.
By using a subsequent planner to refine the path in
rough areas, we are able to apply another cost func-
tion. This, in turn, allows us to increase the impor-
tance of the robot’s safety. The detailed motion plan-
ning accounts for the system’s stability and traction
and for the time consumed by rotation and actuator
movements in order to prevent unnecessary actions.
Since the robot’s speed is very low when traversing
hazardous areas, we neglect forces and dynamic sta-
bility for now. The terms of the cost function for this
planning phase can be divided into a safety term and
a time term.
First, we define the state graph G
s
= (V
s
,E
s
)
which models a discrete subspace X
s
⊂ X of the state
space. Each vertex v
i
∈ V
s
corresponds to a state
x
i
∈ X
s
. Each edge e
i j
∈ E
s
models a valid transition
from state x
i
to x
j
. The validity of a transition is sub-
ject to the movement constraints of the robot model.
The edge weights are given by the cost function de-
rived in this section. In the following we will use the
state space notation to introduce the metrics.
7.1 System Safety Metric
The safety of the system is affected by several fac-
tors. We incorporate the risk assessment, the system
stability and an estimate of the traction into the safety
metric. To quantify these values we approximate the
robot’s footprint by the best fitting plane using a least-
squares method.
AutonomouslyTraversingObstacles-MetricsforPathPlanningofReconfigurableRobotsonRoughTerrain
63
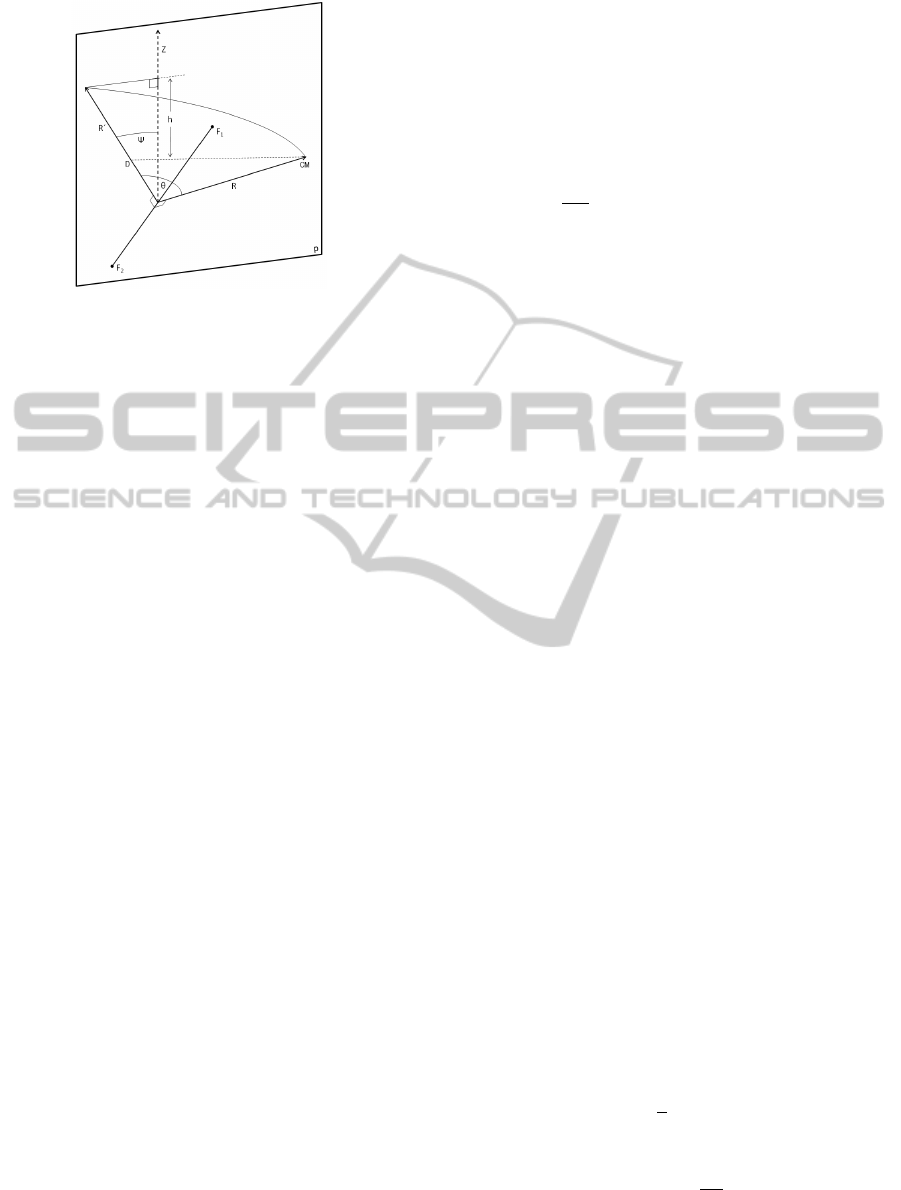
Figure 6: Illustration of the Energy Stability Margin. F
1
and
F
2
represent a border of the supporting polygon, i.e. a rota-
tion axis within the plane p. R is the vector from the border
to the center of mass (CM). Θ depicts the angle between R
and the vertical plane and ψ the inclination of the rotation
axis with respect to the horizontal plane. R
0
is obtained by
rotating R around the rotation axis until it is contained in
plane p. D is computed through D = |R|(1 − cos(Θ)) and
h = |R|(1 − cos(Θ)) · cos(ψ) provides the energy stability
level. Finally, the NESM is defined as s = min
i
(h
i
) with
h
i
being the normalized energy level of the ith edge of the
supporting polygon.
7.1.1 System Stability
We assess the static stability of the robot using the
Normalized Energy Stability Margin (NESM), see
(Garcia et al., 2002) for a comparative overview of
several stability margins. In contrast to the commonly
used projection of the center of mass onto the support-
ing polygon, the NESM directly provides a notion of
quality.
We will give a short overview of the Normalized
Energy Stability Margin, for a detailed discussion see
(Hirose et al., 2001). The NESM basically indicates
the amount of energy which must be applied to tip the
robot over the “weakest” edge of the supporting poly-
gon. It is derived from the Energy Stability Margin
(ESM) (Messuri, 1985) which is illustrated in figure
6.
The rotation axis is given by F
1
and F
2
as a bor-
der of the supporting polygon within the plane p. R
is the vector from the border to the center of mass
(CM). The angle between R and the vertical plane is
given by Θ, and ψ depicts the inclination of the ro-
tation axis with respect to the horizontal plane. R
0
is
obtained by rotating R around the rotation axis un-
til it is contained in plane p. D is computed through
D = |R|(1 − cos(Θ)). Finally,
h = |R|(1 − cos(Θ)) · cos(ψ) (2)
provides the energy stability level for the given rota-
tion axis. The NESM is now defined as
s = min
i
(h
i
), (3)
where h
i
is the normalized energy level with respect
to the ith boundary of the supporting polygon. Our
stability cost is the stability of a robot state x, i.e.
S = 1 − ξ
s
· s(x), (4)
where ξ
s
=
1
s
max
is a normalization term using the
maximal stability value of a given robot model to
scale the cost to [0,1].
The computation of the stability of the system de-
pends on the accuracy of the center of mass. There-
fore, we compute the distributed center of mass, as
CM =
n
∑
i=1
c
i
· m
i
, (5)
where CM is the position of the center of mass of the
system. c
i
and m
i
are the centers of mass and the
masses of the n body parts, i.e. the chassis and the
actuators. Thereby, we can determine the center of
mass with respect to the actuator positions which in-
creases the accuracy of the position of the center of
mass.
Due to the minimum function in the stability mar-
gin the stability value may stay the same for several
actuator positions. In order to reach a more stable
configuration the robot might have to perform a se-
quence of actuator movements which do not have an
immediate gain in stability. Therefore, we need an-
other quantity which helps to pass through such se-
quences. We decided to use an estimate of the robot’s
traction.
7.1.2 Traction Estimate
The traction of the robot is increasingly important
when traversing rough terrain or obstacles. However,
we do not want to use any information about the sur-
face properties because maps with information accu-
rate enough to aid planning are very hard to obtain.
Therefore, we estimate the actuators’ ground contact
as an indicator of the traction. The ground contact of
an actuator a
k
is defined as its angle to the surface.
Then, the traction cost T of a state x ∈ X
s
is given as
the average over those n angles.
T = ξ
t
·
1
n
n
∑
i=1
ψ(a
k
), (6)
where ψ(a
k
) is a function providing the angle to the
surface of an actuator a
k
. ξ
t
=
1
π/2
normalizes the cost
to [0, 1]. Hence, the smaller the angle, the greater the
estimated traction, the safer the robot state in terms of
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
64

traction. Note, measuring the ground contact of the
actuators in terms of their angle to the surface pro-
vides a qualitative measure of the traction. It can be
viewed as an indicator for traction as the traction be-
tween two objects generally increases with the con-
tact area between those objects. Also, this estimate
serves our purpose of lowering the robot’s actuators
on rough terrain.
The combination of the stability cost, the traction
cost and the risk value of the roughness quantification
constitutes the safety term c
safety
of our cost function.
Given two states x
i
,x
j
∈ X
s
the safety cost is defined
as
c
safety
(i, j) =
r
i j
+
1
2
(S
i j
+ T
i j
)
2
, (7)
where r
i j
= max(r
i
,r
j
) is the higher risk of both
states. Similar, S
i j
= max(S
i
,S
j
) is the greater stabil-
ity cost of both involved states, and T
i j
= max(T
i
,T
j
)
is the maximum traction cost.
7.2 Execution Time Metric
Besides a save path we also want to find a fast path to
the goal. In addition, we consider the time required
for rotation and actuator movements which the setup
of the initial path search does not facilitate. For the
initial path search we defined the translational veloc-
ity as a function of the maximum velocity and the
roughness. Since we now have a better understand-
ing of the risk of a robot state, we use the safety cost
c
safety
of the previous section to adjust the velocity.
t
v
(i, j) = ξ
v
·
d
i j
max
v
min
,(1 − w · c
safety
(i, j)) · v
max
,
(8)
where d
i j
is the distance between x
i
and x
j
, and v
min
and v
max
are the minimal and maximal forward veloc-
ity, respectively. w ∈ [0,1] is the safety weight of the
second planning phase and controls the impact of the
state safety on the planning. This term is also normal-
ized to [0,1] using ξ
v
=
1
max
i, j
t
v
.
The maximal physically possible rotational veloc-
ity depends on the ground contact of the robot’s actu-
ators. For instance, if the actuators of the Telemax
model are completely stretched with a total length
of 1.2m, rotating is practically impossible. We per-
formed several experiments to determine the rota-
tional velocities given the actuator positions and com-
posed a look-up table (for continuous values this
would be a function). Please note, the quantities
are sufficient for planning at this level of detail,
even though they are experimentally established on
flat ground and different surface frictions are ne-
glected. The essential information these values pro-
vide is that the maximum rotational velocity varies
with the robot configuration, and some configurations
are more qualified for turning than others. Using this
information the time required for turning from state x
i
to state x
j
is given by
t
ω
= t
ω
(i, j) = ξ
ω
·
|θ
i
− θ
j
|
1
2
(ω(a
i
) + ω(a
j
))
, (9)
where θ
i
and θ
j
are the orientations of the poses cor-
responding to x
i
and x
j
, respectively. ω(·) provides
the rotational velocity of an actuator configuration,
i.e. in our case the value of the look-up table. Fur-
ther, a
i
= (a
1
(i),...,a
n
(i)) is the vector of actuator
controls of x
i
; a
j
is defined accordingly. ξ
ω
=
1
max
i, j
t
ω
normalizes the time values to [0,1].
Similar to the previous formulas, we define the
cost of the actuator movements as the normalized
movement time.
t
a
= t
a
(i, j) = ξ
a
·
|a
i
− a
j
|
1
2
(v
a
(i) + v
a
( j))
, (10)
where a
i
and a
j
are defined as before and v
a
(·) is the
actuator velocity. Again, ξ
a
=
1
max
i, j
t
a
scales the val-
ues to [0,1].
To save execution time we would like the system
to perform actions simultaneously. Therefore, the for-
mulation of the time value of our cost function favors
simultaneous execution by implementing the triangle
inequality. We omitted the state variables i and j for
simplicity.
c
time
(i, j) =
t
2
v
+t
2
ω
+(1−w·c
safety
)
2
·t
2
a
t
v
+t
ω
+(1−w·c
safety
)·t
a
. (11)
The time value measuring the actuator movements
is scaled by the inverse safety cost since in hazardous
areas and especially in unstable states, we want the
system to apply actuator adjustments which improve
the robot state even if they are time consuming. Note,
this cost function is only applied in rough regions and
may not be applicable in flat areas. In flat areas actu-
ator movements are generally unnecessary and solely
introduce costs, thus, should not be favored.
The cost function used to determine the edge
weights consists of the safety metric and the time
measure. The trade-off between safety and speed can
be adjusted by w ∈ [0, 1] for different mission goals.
Given two neighboring states x
i
,x
j
∈ X
s
the cost of the
transition is defined by
c(i, j) = w · c
safety
(i, j) + (1 − w) · c
time
(i, j). (12)
Note, since all quantities are normalized, the value
of the cost function is also bound to [0,1]. It is im-
portant to state here, that even though we introduced
AutonomouslyTraversingObstacles-MetricsforPathPlanningofReconfigurableRobotsonRoughTerrain
65
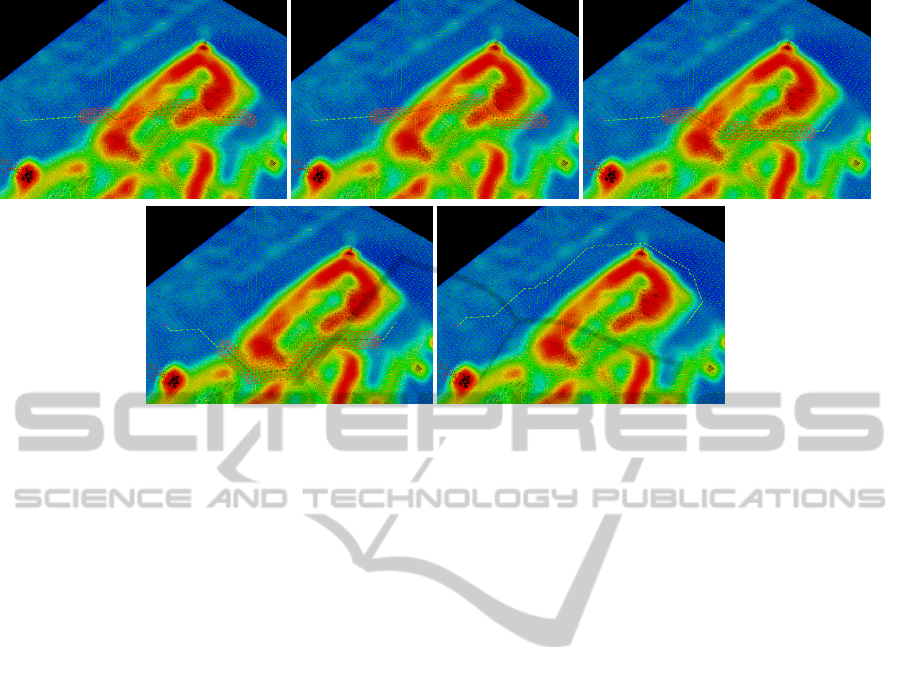
Figure 7: Influence of the safety weight of the initial path search. It determines the primary direction of the final path.
several normalization terms, the only arbitrary values
are the minimal velocity v
min
and the safety weights
w
is
and w. All other values are identified by the robot
model and its abilities. Using a graph-based model
with the defined edge weights allows us to perform
a Dijkstra search on the state graph G
s
to find the
most stable, yet, fastest path to the goal considering
the complete robot state.
8 EXPERIMENTAL RESULTS
In this section we present several experiments. First,
we illustrate the influence of both safety weights on
the initial path search w
is
and the detailed motion
planning step w. Second, we preformed tests on real-
world maps with a real robot to prove that our metrics
and plans are valid and executable. To the best of our
knowledge, there are no other approaches which aim
at overcoming arbitrary obstacles with similar recon-
figurable robots. Hence, we do not provide a com-
parison with other approaches. However, it would be
possible to compare single aspects of our metrics but
we consider this unfit to provide any insight of how
well our metrics are suited as a whole for obstacle
traversal compared to others.
8.1 Impact of the Safety Weights
The safety weight of the initial path search w
is
de-
termines the main direction of the final path. Small
weights will lead to short paths, higher values will
cause low risk paths. Figure 7 shows the different
paths obtained for a given start and goal position and
the safety weights 0.0, 0.25, 0.5, 0.75 and 1.0. As
one can see for a weight of 0.0 the path leads to a di-
rect path to the goal position. Increasing the safety
weight forces the algorithm to face the direction of
the steepest gradient when climbing inclinations and
to avoid more and more high risk areas (red). Even-
tually, the path avoids even less risky regions (green)
and circumvents the hill.
While the safety weight of the initial path search
determines the primary course of the final path, the
safety weight of the detailed motion planning step w
influences the driving velocity and the applied actu-
ator configurations. With an growing importance of
the robot safety the translational velocity decreases
and the changing actuator positions becomes cheaper.
Also, the time required to move the actuators ampli-
fies the execution time. Therefore, with an increasing
safety weight the execution time rises and the safety
cost declines. This trend is shown in figures 8 and 9.
For these experiments we restricted the detailed mo-
tion planning to the initial path in order to prevent the
path adjustments within the tube to disturb the results
and build a common basis for the comparison.
8.2 Real-world Experiments
We performed tests with the Telerob Telemax model
to prove that the plans proposed by our motion plan-
ner are valid and executable by a real robot. The envi-
ronments are shown in figures 10 and 12. Both maps
were recorded using a laser range finder and were sub-
sequently filled and smoothed to facilitate planning.
Their sizes are 36.4 × 30.45 m and 43.95 × 32.95 m
respectively. For those tests we used the following
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
66
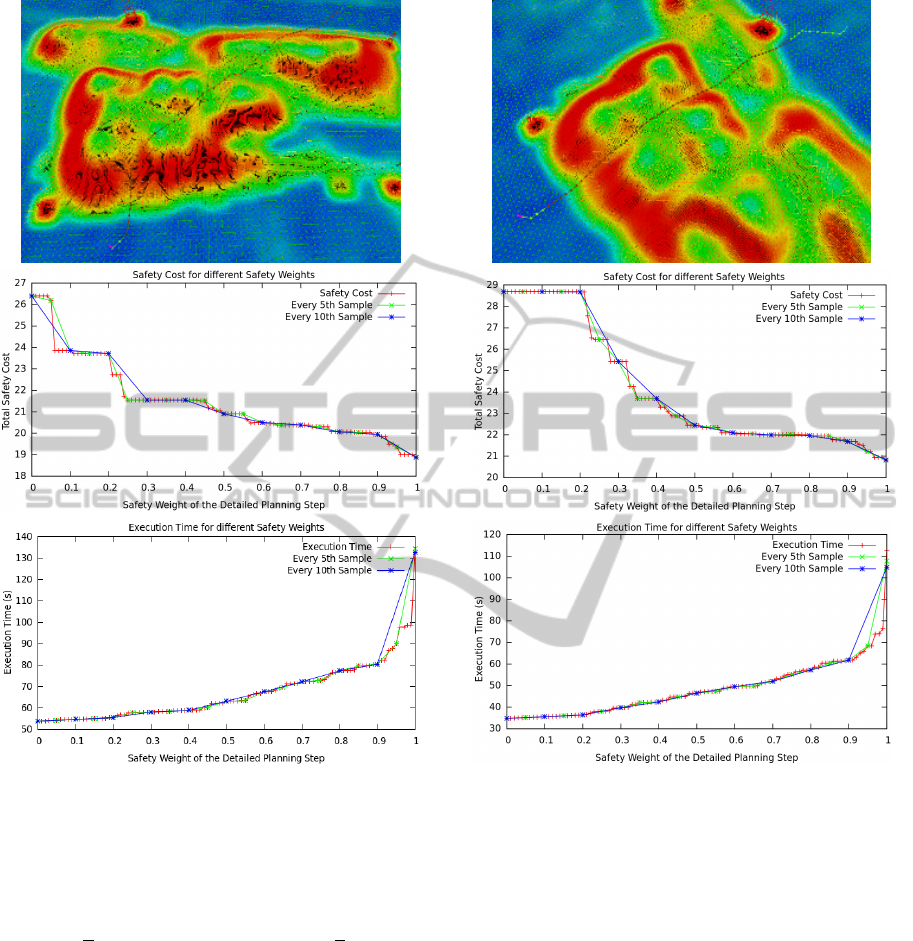
Figure 8: Influence of the safety weight of the detailed mo-
tion planning step on the execution time and safety of the
path. The top image shows the first path used for evalua-
tion.
values: The robot’s maximal traversable height is
h
max
= 0.5 m. In high risk areas it is allowed to drive
v
min
= 0.2
m
s
and on flat ground v
max
= 1.2
m
s
. The dis-
cretization of the maps was 5 cm and the window size
of the filters is 20 by 20 cells. The resolution of the
motion graph was 30 cm (half the robot length) and we
considered 8 orientations in each point (correspond-
ing to a resolution of 45
◦
). By taking half the robot
length we do not need to perform intermediate valid-
ity tests between two neighboring positions. With re-
spect to the actuator values, both front and both rear
actuators were required to be the same. Further, the
positions were limited to [−45
◦
,45
◦
] in steps of 15
◦
.
The safety weights were set to w
is
= 0.75 and w = 0.5.
On the two outdoor environments, we performed
several planning queries of which we present two, one
Figure 9: Influence of the safety weight of the detailed mo-
tion planning step on the execution time and safety of the
path. The top image shows the second path used for evalu-
ation.
for each map. Figures 11 and 13 show the planned
paths and pictures of the execution by our robot. In
the first scenario (figure 11) the robot had to cross
the hill of rubble through the dips, avoiding the high
risk elevations. The robot was able to follow the pro-
posed path while the planned actuator configurations
prevented the robot from falling over. Problems dur-
ing the execution where related to the small-grained
material of the rubble which caused the robot to slip
casually. Equally, our robot traversed the hill of the
second scenario given the motion plan shown in fig-
ure 13. The localization was solely based on GPS. In
combination with the inaccuracy of the map made it
difficult for the controller to determine which part of
the plan must be executed.
However, in general, the robot was able to exe-
AutonomouslyTraversingObstacles-MetricsforPathPlanningofReconfigurableRobotsonRoughTerrain
67
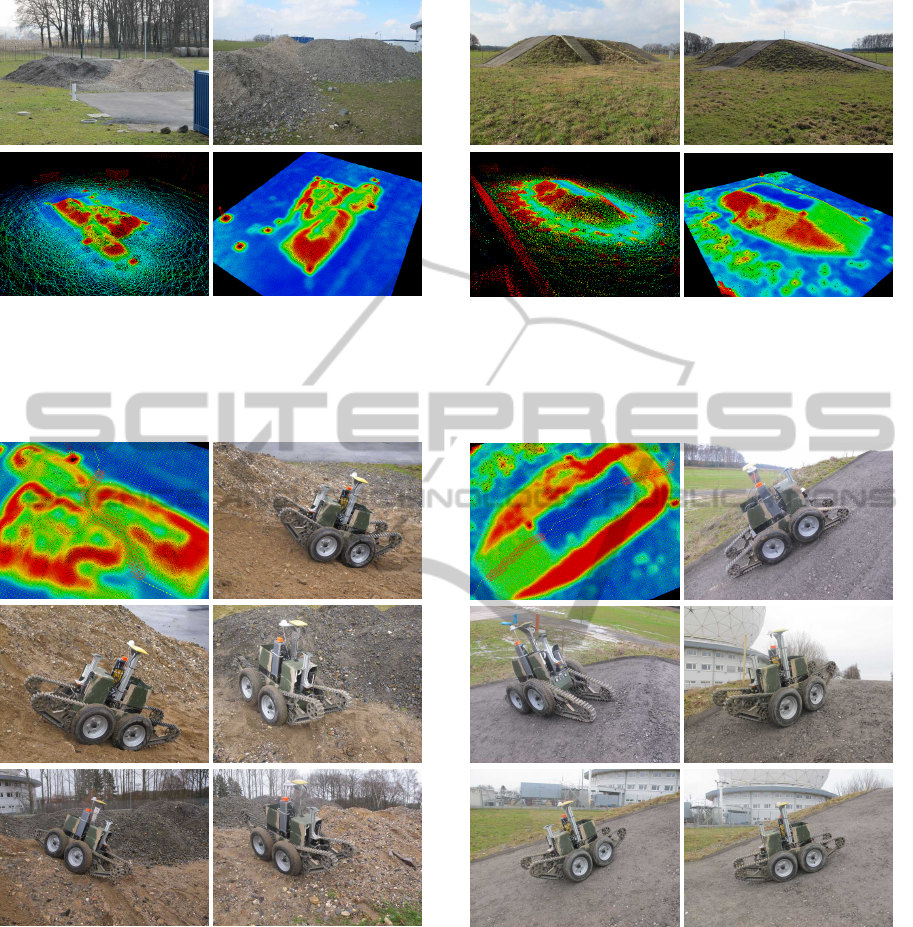
Figure 10: First real-world scenario. The top row shows
two images of the hill of rubble. The bottom row depicts
the point cloud and the filled, smoothed map. The size of
the map is 36.4 × 30.45 m. The colors indicate the risk of
traversal, ranging from blue for flat regions over green and
yellow to red, high risk areas.
Figure 11: Results of the first real-world experiments. The
first image depicts the plan given to the robot. The other
pictures show the robot during the execution. If the robot
safety permits, configurations are sometimes applied in ad-
vanced or while in motion to avoid stop-and-go movement.
cute all plans of our motion planning algorithm and
successfully traversed the obstacles. Further, the pro-
posed configurations proved to be suited to ensure the
safety of the robot. Problems during the execution
were related to terrain parameters or to inaccuracy of
the sensor data.
Figure 12: Second real-world scenario. The top row shows
two images of the testing hill. In the bottom row the point
cloud and the filled, smoothed map are depicted. The size
of the map is 43.95 × 32.95 m. The colors indicate the risk
of traversal, ranging from blue for flat regions over green
and yellow to red, high risk areas.
Figure 13: Results of the second real-world experiments.
The first image depicts the plan given to the robot. The
other pictures show the robot during the execution. If the
robot safety permits, configurations are sometimes applied
in advanced or while in motion to avoid stop-and-go move-
ment.
9 CONCLUSIONS AND FUTURE
WORK
In this paper we presented different metrics used by
our motion planning algorithm for robots with recon-
figurable chassis to find paths through rough terrain
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
68

and over obstacles. By introducing a two-phase plan-
ner we are able to use two different cost functions, one
to find a low-risk path to the goal and another suited to
achieve safe robot configurations along the path. We
introduced a roughness quantification which, based
on filtered height differences, provides an estimate
of the risk the robot is exposed to. The presented
cost functions include costs of risk adjusted execu-
tion times and safety parameters, like the stability of
the system and an traction estimate. Using these met-
rics we provided several experiments which prove the
validity of our measures.
As stated in the experiment section, the algorithm
works on a subset of the robot state space X. Im-
proving the state space representation and enhancing
the search method to facilitate a more comprehensive
search for robot configurations is at the core of our fu-
ture work. Also, we look at the possibilities to over-
come extreme obstacles up to about 40cm in height
as this is the limit given by the manufacturer. This
might require new metrics and a more sophisticated
controller to cope with arising challenges.
REFERENCES
Dornhege, C. and Kleiner, A. (2007). Behavior maps for
online planning of obstacle negotiation and climbing
on rough terrain. In IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS).
Garcia, E., Estremera, J., and de Santos, P. G. (2002). A
Comparative Study of Stability Margins for Walking
Machines. Robotica, 20:595–606.
Hirose, S., Tsukagoshi, H., and Yoneda, K. (2001). Nor-
malized Energy Stability Margin and its Contour of
Walking Vehicles on Rough Terrain. In IEEE Interna-
tional Conference on Robotics & Automation (ICRA).
Howard, A., Seraji, H., and Tunstel, E. (2001). A rule-
based fuzzy traversability index for mobile robot navi-
gation. In IEEE International Conference on Robotics
and Automation (ICRA).
Howard, T. M. and Kelly, A. (2007). Optimal Rough
Terrain Trajectory Generation for Wheeled Mobile
Robots. International Journal of Robotics Research,
26(2):141–166.
Iagnemma, K. and Dubowsky, S. (2004). Mobile Robots
in Rough Terrain - Estimation, Motion Planning, and
Control with Application to Planetary Rovers, chap-
ter Rough Terrain Motion Planning, pages 51–79.
Springer Tracts in Advanced Robotics.
Iagnemma, K., Kang, S., Shibly, H., and Dubowsky,
S. (2004). Online terrain parameter estimation for
wheeled mobile robots with application to planetary
rovers. IEEE Transactions on Robotics, 20:921 – 927.
Jacoff, A. S., Downs, A. J., Virts, A. M., and Messina, E. R.
(2008). Stepfield Pallets: Repeatable Terrain for Eval-
uating Robot Mobility. In Performance Metrics for
Intelligent Systems (PerMIS) Workshop.
Magid, E., Ozawa, K., Tsubouchi, T., Koyanagi, E., and
Yoshida, T. (2008). Rescue Robot Navigation: Static
Stability Estimation in Random Step Environment. In
Carpin, S., Noda, I., Pagello, E., Reggiani, M., and
von Stryk, O., editors, Simulation, Modeling, and Pro-
gramming for Autonomous Robots, volume 5325 of
Lecture Notes in Computer Science, pages 305–316.
Springer Berlin / Heidelberg.
Messuri, D. A. (1985). Optimization of the locomotion of a
legged vehicle with respect to maneuverability. PhD
thesis, Ohio State University.
Miro, J., Dumonteil, G., Beck, C., and Dissanayake, G.
(2010). A kyno-dynamic metric to plan stable paths
over uneven terrain. In IEEE/RSJ International Con-
ference on Intelligent Robots and Systems (IROS).
Molino, V., Madhavan, R., Messina, E., Downs, A., Bal-
akirsky, S., and Jacoff, A. (2007). Traversability met-
rics for rough terrain applied to repeatable test meth-
ods. In IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS).
Rusu, R. B., Sundaresan, A., Morisset, B., Hauser,
K., Agrawal, M., Latombe, J.-C., and Beetz, M.
(2009). Leaving Flatland: Efficient Real-Time Three-
Dimensional Perception and Motion Planning. Jour-
nal of Field Robotics, 26:841–862.
Seraji, H. (1999). Traversability index: a new concept for
planetary rovers. In IEEE International Conference
on Robotics and Automation (ICRA).
AutonomouslyTraversingObstacles-MetricsforPathPlanningofReconfigurableRobotsonRoughTerrain
69
