
Rotor Speed Sensor Fault Detection in Induction Motors
Riccardo Marino, Stefano Scalzi, Patrizio Tomei and Cristiano Maria Verrelli
Department of Electronic Engineering, University of Rome “Tor Vergata”, Via del Politecnico 1, 00133 Rome, Italy
Keywords:
Fault Detection, Speed Sensor Faults, Induction Motors.
Abstract:
The problem of detecting a speed sensor fault in induction motor applications with load torque and rotor/stator
resistances uncertainties is addressed. It is shown that in typical operating conditions involving constant
rotor speed and flux modulus and non-zero load torque, a constant non-zero (sufficiently large) difference
between the measured speed and the actual speed may be on-line identified by an adaptive flux observer
which incorporates a convergent rotor resistance identifier and relies on the measured rotor speed and stator
currents/voltages.
1 INTRODUCTION
Three-phase induction motors are widely used for
electric railway and automotive traction (Hill, 1994)
since they offer several advantages such as no com-
mutator, no brushes, no rotor windings in squirrel
cage motors, simple rugged structure, inherent regen-
erative braking capability, ability of tolerating heavy
overloading and of producing high torques with low
weights, small sizes, and low rotating masses. In high
impact automotive applications (see Rehman, 2008)
such as electrical and hybrid electrical vehicles, the
operation continuity is a key feature and high relia-
bility of the drive system should be guaranteed (see
Benbouzid et al., 2007). On the other hand, traction
main drives are often equipped with rotor speed sen-
sors (Guzinski et al., 2009) which are used by clas-
sical induction motor control schemes such as direct
or indirect field oriented controls (see Marino et al.,
2010b) for recent adaptive results). In the case of ro-
tor speed sensor fault, a proper and prompt fault de-
tection is required so that an effective action can be
performed and the fault effect is not widely propa-
gated with a resulting hard system failure.
The idea underlying a model-based approach to
fault diagnosis (see for instance (Isermann, 2011) and
(Ding, 2008)) relies on the assumption that certain
process signals carry information about the faults of
interest. The gist of the approach is then to gener-
ate, on the basis of measurements from (and knowl-
edge of) the system, a set of ”residual signals” which
are zero when no fault is present and non-zero when
faults occur (Bennet et al., 1999). However sev-
eral difficulties naturally arise for the specific applica-
tion to induction motors: induction motor dynamics
are nonlinear; flux measurements are not available;
three critical parameters, namely rotor and stator re-
sistances (which vary during operations due to motor
heating) and load torque (which depends on applica-
tions), are typically uncertain and are required to be
on-line estimated.
A first intuitive solution (I S ) to speed sensor fault
detection problems relies on designing an adaptive
flux/speed observer which does not use the measured
speed but only stator currents and voltages measure-
ments (see (Guzinski et al., 2010) and (Guzinski et al.,
2009)). The gist of the above design is then to com-
pare the measured speed with the estimated one with
the aim of identifying the possibly occurring speed
sensor fault. Since suitable identifiers for the uncer-
tain parameters are to be incorporated in the adaptive
observer in order to avoid false fault detections, the
drawback of the above approach is then constituted
by the well-known identifiability and observability is-
sues which arise when only stator currents and volt-
ages are measured. It is in fact well-established
that when the motor operates at constant rotor speed
and flux modulus with non-zero load torque to mini-
mize power losses and maximize power efficiency at
steady-state (see Marinoet al., 2010b), the simultane-
ous estimation of rotor speed and rotor resistance can-
not be achieved (see (Ha and Lee, 2000), (Marino et
al., 2008), as well as (Marino et al., 2010a)) and ref-
erences therein) since only a linear combination
L = R
r
+ γω
of the rotor resistance R
r
and speed ω (along with
the real γ) can be on-line identified by stator currents
59
Marino R., Scalzi S., Tomei P. and Maria Verrelli C..
Rotor Speed Sensor Fault Detection in Induction Motors.
DOI: 10.5220/0004026500590066
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 59-66
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

and voltages measurements. This structural difficulty
may be used to our advantage by noting that when the
(constant) measured speed ω
m
is used by a suitable
adaptive flux observer AF O, the identifiable linear
combination becomes
L
e
= R
r
+ γ(ω −ω
m
).
If the rotor speed is measured and no speed sensor
fault fault occurs, i.e. ω ≡ ω
m
, estimating L
e
coin-
cides with estimating R
r
; on the other hand, in the
presence of speed sensor failures, estimating L
e
coin-
cides with estimating a quantity which, depending on
(ω −ω
m
), may be larger or smaller than any admissi-
ble R
r
∈ [R
rm
,R
rM
] for the specific motor in consider-
ation, that is
R
r
+ γ(ω −ω
m
) < R
rm
or
R
r
+ γ(ω −ω
m
) > R
rM
.
In this case a speed sensor fault may be on-line
identified by designing a speed measurement-based
adaptive observer and by monitoring the estimate of
L
e
on the basis of the boundary values R
rm
and R
rM
.
The aim of this paper is to show that an adaptive
flux observer A F O which incorporates a convergent
rotor resistance identifier and relies on the measured
rotor speed and stator currents/voltages may be ef-
fectively used to on-line identify a constant non-zero
(sufficiently large) difference ω − ω
m
in typical oper-
ating conditions involving non-zero load torque and
constant rotor speed and flux modulus. In particular,
denoting by α ∈ [α
m
,α
M
] (α
m
= L
r
R
rm
, α
M
= L
r
R
rM
)
the ratio between the rotor resistance R
r
and the ro-
tor inductance L
r
and by
ˆ
α its estimate (provided by
the AF O), we will show that a residual signal for
the speed sensor fault detection may be chosen as
the steady-state distance of
ˆ
α(t) from the compact set
[α
m
,α
M
], i.e.
lim
t→+∞
dist(
ˆ
α(t); [α
m
,α
M
]).
A similar idea (though not analytically motivated)
has been also recently presented in Najafabadi et al.
(2011) even though it relies on an observer which is
adaptive with respect to the rotor resistance only. In
contrast to Najafabadi et al. (2011), we propose a
candidate adaptive flux observer belonging to the set
of all adaptive flux observers which provide conver-
gent estimates of the rotor resistance despite uncer-
tainties in critical parameters such as load torque and
stator resistance. This is to avoid false fault detections
which may be related to uncertainties in those criti-
cal parameters. With this respect, among the adap-
tive observers which have been proposed in the lit-
erature since 1978 (see for instance (Castaldi et al.,
2005), (Hasan and Husain, 2009), (Jeon et al., 2002),
(Kenn
´
e et al., 2010), (Marino et al., 2000), (Marino
et al., 2011), (Najafabadi et al., 2011), (T¸ iclea and
Besanc¸on, 2006) and references therein), we con-
sider in this paper the one presented in Marino et al.
(2011) which is simultaneously characterized by: i)
an overall structural simplicity with no use of sign
functions, high gains or output time derivatives which
lead to well-known implementation difficulties and
high noise sensitivity; ii) persistency of excitation
conditions which are naturally related to motor ob-
servability and parameter identifiability and are guar-
anteed to be satisfied in the typical case of constant
motor speed and flux modulus and non-zero electro-
magnetic torque; iii) exponential convergence prop-
erties guaranteeing a certain degree of robustness. It
is constituted by an adaptive flux observer which is
able to estimate the motor fluxes and to identify the
rotor resistance and by a stator resistance identifier
whose design is performed on a different time scale
in order to isolate its estimation from the estimation
of motor fluxes and rotor resistance (see also (Jadot
et al., 2009), (Marino et al., 2010c)) for a similar ap-
proach to parameter estimation in induction motors).
Simulation and experimental results illustrate the ef-
fectiveness of the proposed solution and show satis-
factory fault detection performances. Such a speed
sensor fault detector constitutes a first step toward the
design of effective fault-tolerant control architectures
which involve output feedback adaptive tracking con-
trols (Marino et al., 2010b) minimizing power losses
in conjunction with sensorless adaptive tracking con-
trols (Marino et al., 2010c) imposing rotor speed ob-
servability and resistance identifiability. Those fault-
tolerant architectures may be of special interest for
speed-controlled traction applications in which induc-
tion motor controls are required to tolerate rotor speed
sensor faults (see (Benbouzid et al., 2007), (Guzinski
et al., 2010), (Guzinski et al., 2009)) and to main-
tain at the same time high power efficiency at every
speed (see (Bennet et al., 1999), (Diallo et al., 2004),
(Lee and Ryu, 2003), (Romero et al., 2010), (Wang et
al., 2006) for the general problem of designing fault-
tolerant induction motor controls).
2 PHYSICAL MODELING
Assuming linear magnetic circuits, the dynamics of a
balanced non-saturated induction motor with one pole
pair in a fixed reference frame attached to the stator
are given by the well known fifth-order model (see for
instance (Marino et al., 2010a) and references therein)
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
60

dω
dt
= µ(ψ
ra
i
sb
− ψ
rb
i
sa
) −
T
L
J
dψ
ra
dt
= −αψ
ra
− ωψ
rb
+ αMi
sa
dψ
rb
dt
= −αψ
rb
+ ωψ
ra
+ αMi
sb
(1)
di
sa
dt
= −
R
s
σ
+ βαM
i
sa
+
1
σ
u
sa
+ βαψ
ra
+ βωψ
rb
di
sb
dt
= −
R
s
σ
+ βαM
i
sb
+
1
σ
u
sb
+ βαψ
rb
− βωψ
ra
in which: ω is the rotor speed, (ψ
ra
,ψ
rb
) are the ro-
tor fluxes, (i
sa
,i
sb
) are the stator currents, (u
sa
,u
sb
)
are the stator voltages in a fixed reference attached
to the stator. The constant model parameters are:
load torque T
L
; motor moment of inertia J; rotor and
stator windings resistances (R
r
,R
s
) and inductances
(L
r
,L
s
); mutual inductance M. To simplify nota-
tions we use the reparameterization: α =
R
r
L
r
, β =
M
σL
r
,
µ =
M
JL
r
, σ = L
s
(1 −
M
2
L
s
Lr
). The rotor fluxes (ψ
ra
,ψ
rb
)
are unmeasured variables since flux sensors are usu-
ally not available while the parameters T
L
, α and R
s
are typically uncertain owing to load torque depen-
dence on applications and owing to resistance varia-
tions which depend on motor heating. We will only
assume, in the following, the boundedness of state
and input variables while any restriction concerning
the boundedness of stator currents integrals, which
has been proposed for the design of similar adaptive
flux observers in Jeon et al. (2002), (Marino et al.
(2000), is not required.
3 OBSERVER DESIGN
The first idea in Marino et al. (2011) is to introduce
the variables z
a
= i
sa
+ βψ
ra
, z
b
= i
sb
+ βψ
rb
so that
the motor electro-magnetic equations in (1) become
˙z
a
= −
R
s
σ
i
sa
+
1
σ
u
sa
˙z
b
= −
R
s
σ
i
sb
+
1
σ
u
sb
di
sa
dt
= −
R
s
σ
i
sa
− α(1 +βM)i
sa
− ωi
sb
+ αz
a
+ωz
b
+
1
σ
u
sa
(2)
di
sb
dt
= −
R
s
σ
i
sb
− α(1 +βM)i
sb
+ ωi
sa
+ αz
b
−ωz
a
+
1
σ
u
sb
.
The advantage of using the (z
a
,z
b
) variables,
which are physically related to the stator fluxes, is that
their dynamics depend neither on the unmeasured ro-
tor fluxes nor on the uncertain rotor resistance. On the
basis of model (2), the following observer is designed
(k
i
is a positive design parameter):
˙
ˆ
i
sa
= −
ˆ
R
s
σ
i
sa
−
ˆ
α(1 + βM)i
sa
− ω
ˆ
i
sb
+
ˆ
αˆz
a
+ωˆz
b
+
u
sa
σ
+ k
i
(i
sa
−
ˆ
i
sa
)
˙
ˆ
i
sb
= −
ˆ
R
s
σ
i
sb
−
ˆ
α(1 + βM)i
sb
+ ω
ˆ
i
sa
+
ˆ
αˆz
b
−ωˆz
a
+
u
sb
σ
+ k
i
(i
sb
−
ˆ
i
sb
) (3)
˙
ˆz
a
= −
ˆ
R
s
σ
i
sa
+
u
sa
σ
+ v
a
˙
ˆz
b
= −
ˆ
R
s
σ
i
sb
+
u
sb
σ
+ v
b
which is a copy of system (2) with: i) the estimates
(ˆz
a
, ˆz
b
,
ˆ
α,
ˆ
R
s
) in place of the unmeasured/uncertain
(z
a
,z
b
, α, R
s
); ii) stabilizing terms on the current esti-
mation errors (i
sa
−
ˆ
i
sa
), (i
sb
−
ˆ
i
sb
); iii) the compensat-
ing terms v
a
,v
b
yet to be designed. According to the
stability analysis in Marino et al. (2011), the estima-
tion laws for
ˆ
α and
ˆ
R
s
and the feedback terms v
a
,v
b
are chosen as
˙
ˆ
α = −k
α
h
[(1 + βM)i
sa
− ˆz
a
]
˜
i
sa
+ [(1 +βM)i
sb
− ˆz
b
]
˜
i
sb
i
˙
ˆ
R
s
= −k
R
(v
a
i
sa
+ v
b
i
sb
)
v
a
= −k
z
ω
˜
i
sb
−
ˆ
α
˜
i
sa
v
b
= k
z
ω
˜
i
sa
+
ˆ
α
˜
i
sb
(4)
in which
˜
i
sa
= i
sa
−
ˆ
i
sa
,
˜
i
sb
= i
sb
−
ˆ
i
sb
are the stator
current estimation errors, k
z
and k
α
are positive design
parameters, k
R
is a sufficiently small positive design
parameter.
The two-time-scale arguments in Marino et al.
(2011), under certain identifiability assumptions at
steady-state, allow for isolating the estimation of the
stator resistance from the estimation of motor fluxes
(achieved through the estimation of (z
a
,z
b
)) and rotor
resistance so that the following persistency of excita-
tion condition:
P
e
: there exist two positive reals t
p
and k
p
such that
the persistency of excitation condition (I
3
is the
3 × 3 identity matrix)
Z
t+t
p
t
Γ
T
(τ)Γ(τ)dτ ≥ k
p
I
3
, ∀ t ≥ 0 (5)
holds with
Γ =
α ω β(ψ
ra
− Mi
sa
)
−ω α β (ψ
rb
− Mi
sb
)
is obtained. Inequality (5) is naturally related to mo-
tor observability and parameter identifiability: when
the rotor speed and the rotor flux modulus are con-
stant and the load torque is zero so that ψ
ra
= Mi
sa
RotorSpeedSensorFaultDetectioninInductionMotors
61
and ψ
rb
= Mi
sb
, it cannot be satisfied; when a positive
load torque is applied and when the rotor speed and
the rotor flux modulus are constant with ψ
2
ra
+ ψ
2
rb
=
c
ψ
> 0, it is satisfied.
The gist of the estimation design in Marino et al.
(2011) and the required assumptions can be simply
explained in the following terms: if the adaptive ob-
server (3)-(4) (with no stator resistance identifier) is
used with a constant value of the stator resistance that
is slightly different from its actual value, then a non-
zero steady-state solution appears that causes a suit-
able measured output function s
π
= v
a
i
sa
+v
b
i
sb
to be,
in first approximation, monotone with respect to the
R
s
-estimation error
˜
R
s
= R
s
−
ˆ
R
s
; thus, by adjusting
the R
s
-estimate
ˆ
R
s
on the basis of this output func-
tion (slowly, in order not to deviate too much from
the steady-state solution) one can obtain the correct
estimation of R
s
and the consequent exponential con-
vergence to zero of all the estimation errors
˜
i
sa
,
˜
i
sb
,
z
a
− ˆz
a
, z
b
− ˆz
b
, α −
ˆ
α,
˜
R
s
. Exponential rotor flux re-
covering can be finally obtained by
ˆ
ψ
ra
ˆ
ψ
rb
= −
1
β
ˆ
i
sa
− ˆz
a
ˆ
i
sb
− ˆz
b
where the filtered estimates (
ˆ
i
sa
,
ˆ
i
sb
) are preferred to
the measured (i
sa
,i
sb
) for practical implementation is-
sues. The following second-order load torque identi-
fier (k
ω
and k
T
are positive design parameters):
˙
ˆ
ω = µ(
ˆ
ψ
ra
i
sb
−
ˆ
ψ
rb
i
sa
) −
ˆ
T
L
J
+ k
ω
(ω −
ˆ
ω)
˙
ˆ
T
L
= −k
T
(ω −
ˆ
ω)
is finally proposed in Marino et al. (2011). It can be
used in conjunction with the adaptive observer (3)-(4)
to provide an exponentially convergent estimate of the
load torque once convergent estimates of rotor fluxes
have been obtained. The proof, which is reported in
Marino et al. (2010a), is based on the quadratic func-
tion
V
T
=
1
2k
T
J
˜
T
2
L
+
1
2
˜
ω
2
+ ε
˜
ω
˜
T
L
in which
˜
ω = ω −
ˆ
ω,
˜
T
L
= T
L
−
ˆ
T
L
and ε > 0 is a suf-
ficiently small positive real.
4 SENSOR FAULT DETECTION
The aim of this section is to prove that a constant non-
zero (sufficiently large) difference between the mea-
sured speed and the actual speed may be on-line iden-
tified by the adaptive flux observer (3)-(4) (in which
the measured speed ω
m
replaces the actual speed ω) in
typical operating conditions involving non-zero load
torque and constant rotor speed and flux modulus. To
this purpose, we preliminarly note that in those con-
ditions we have
˙
z }| {
ψ
2
ra
+ ψ
2
rb
≡ 0
˙
ω ≡ 0,
from which we obtain
Mi
sa
= ψ
ra
− cψ
rb
Mi
sb
= ψ
rb
+ cψ
ra
(6)
with (ω
s
is the slip speed [see (Marino et al., 2010a)])
c =
T
L
M
Jµc
ψ
=
T
L
L
r
c
ψ
= ω
s
/α.
By adding and subtracting in (2) suitable terms
proportional to ω
e
= ω − ω
m
and by using (6), equa-
tions (2) can be equivalently rewritten as
˙z
a
= −
R
s
σ
i
sa
+
1
σ
u
sa
˙z
b
= −
R
s
σ
i
sb
+
1
σ
u
sb
di
sa
dt
= −
R
s
σ
i
sa
− ω
m
i
sb
+ ω
m
z
b
+
1
σ
u
sa
+α[z
a
− (1 +βM)i
sa
] + ω
e
(z
b
− i
sb
)
di
sb
dt
= −
R
s
σ
i
sb
+ ω
m
i
sa
− ω
m
z
a
+
1
σ
u
sb
+α[z
b
− (1 +βM)i
sb
] − ω
e
(z
a
− i
sa
)
with the last two equations reading
di
sa
dt
= −
R
s
σ
i
sa
− ω
m
i
sb
+ ω
m
z
b
+
1
σ
u
sa
+
α +
ω
e
c
(z
a
− (1 +βM)i
sa
)
di
sb
dt
= −
R
s
σ
i
sb
+ ω
m
i
sa
− ω
m
z
a
+
1
σ
u
sb
+
α +
ω
e
c
(z
b
− (1 +βM)i
sb
).
In other terms, in typical operating conditions in-
volving non-zero load torque and constant rotor flux
modulus and (measured and actual) speeds, an equiv-
alent constant α
e
= α + ω
e
/c appears in the motor
model (with ω
m
in place of ω): it incorporates any
possibly non-zero difference between the measured
speed and the actual speed.
By virtue of the same analysis presented in Marino
et al. (2011) and discussed in Section 3 (with ω
m
in
place of ω), the adaptive observer (3)-(4) is able to
guarantee exponential convergence to zero of all the
estimation errors
˜
i
sa
,
˜
i
sb
, z
a
− ˆz
a
, z
b
− ˆz
b
, α
e
−
ˆ
α,
˜
R
s
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
62
(provided that initial errors belong to the region of at-
traction of the origin for the error system dynamics).
Exponential estimation of motor fluxes, equivalent α
and stator resistance are therefore achieved. In par-
ticular, lim
t→+∞
dist(
ˆ
α(t);[α
m
,α
M
]) may be used as a
residual signal for speed sensor fault detection since
when rotor speed ω and flux modulus
q
ψ
2
ra
+ ψ
2
rb
are
constant along with the measured speed ω
m
, the α-
estimate
ˆ
α(t) is guaranteed to exponentially converge
to α
e
. It is clear that only the speed sensor faults that
lead to a value of α
e
outside the compact set [α
m
,α
M
]
can be in this way identified. An estimate of ω
e
(and
therefore of the sensor failure magnitude) can be fi-
nally obtained according to
T
L
L
r
c
ψ
(α
e
− α) = ω
e
once the load torque (through the load torque identi-
fier) and the rotor fluxes have been estimated.
5 SIMULATION RESULTS
The aim of this section is to illustrate the previ-
ously presented results even in the presence of time-
varying perturbations of the motor resistances and
step-wise variations of the load torque. To this pur-
pose, the nonlinear adaptive observer (3)-(4) and the
load torque identifier are simulated for the three-phase
single pole pair 0.6-kW induction motor OE-MER
7-80/C in Marino et al. (2010a) whose parameters
are: J = 0.0075 kgm
2
, R
s
= 5.3 Ohm, R
r
= 3.3 Ohm,
L
s
= 0.365 H, L
r
= 0.375 H, M = 0.34 H. The motor
(with initial conditions ψ
ra
(0) = ψ
rb
(0) = 0.1 Wb) is
illustratively controlled by the input-output feedback
linearizing control reported in Section 2.4 of Marino
et al. (2010a) (which relies on exact rotor speed
and stator current measurements and on the perfect
knowledge of all motor parameters). The rotor speed
and the flux modulus are reported in Figure 1. The de-
sign parameters are chosen as (all the values are in SI
units): k
i
= 120, k
z
= 3, k
α
= 450, k
R
= 0.1, k
ω
= 200,
k
T
= 100
2
J. All the observer initial conditions are set
to zero excepting for
ˆ
α(0) = 9 s
−1
and
ˆ
R
s
(0) = 5.4
Ohm. For t < 1.8 s the measured speed is equal to the
actual one (ω ≡ ω
m
) while for t ≥ 1.8 s a speed sensor
fault occurs leading to ω − ω
m
= 0.4ω. The equiva-
lent rotor resistance R
e
= L
r
α
e
is thus equal to R
r
for
t < 1.8 s and equal to R
r
+ω
e
c
ψ
/T
L
for t ≥ 1.8 s. The
rotor fluxes, the load torque, the equivalent rotor resis-
tance, the stator resistance along with the correspond-
ing converging estimates are reported in Figures 2-5.
Fast estimation is obtained: the speed sensor fault can
be promptly identified by monitoring the estimated
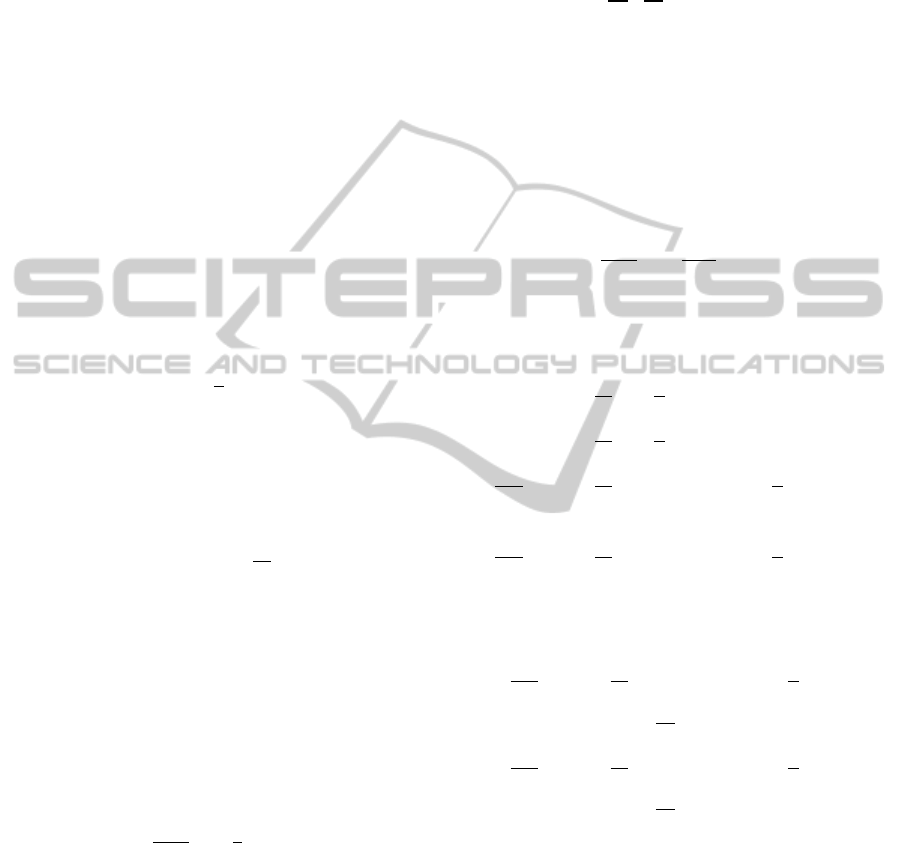
Figure 1: Rotor speed ω and flux modulus
q
ψ
2
ra
+ ψ
2
rb
.
Figure 2: Rotor fluxes ψ
ra
,ψ
rb
(dash) and their estimates
ˆ
ψ
ra
,
ˆ
ψ
rb
(solid); rotor fluxes ψ
ra
,ψ
rb
estimation errors.
Figure 3: Load torque T
L
(dash) and its estimate
ˆ
T
L
(solid).
Figure 4: Equivalent rotor resistance R
re
(dash) and its esti-
mate
ˆ
R
r
(solid).
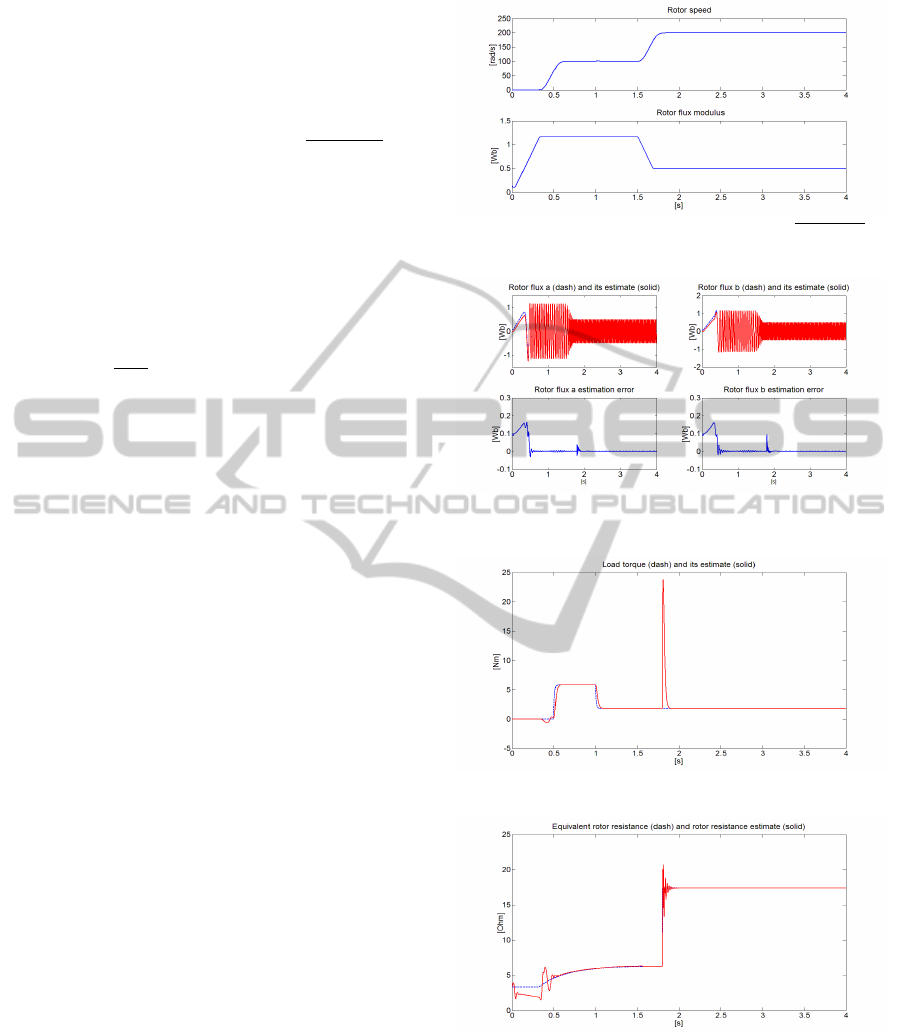
rotor resistance on the basis of the available bound-
ing values R
rm
= L
r
α
m
= 2.8 Ohm, R
rM
= L
r
α
M
= 6.9
Ohm. In order to illustrate the possibility of detecting
false faults by using adaptive observers with no stator
resistance identifier (as in (Najafabadiet al., 2011)),
the same simulation is carried out in the presence of
no speed sensor fault for the adaptive observer (3)-
RotorSpeedSensorFaultDetectioninInductionMotors
63
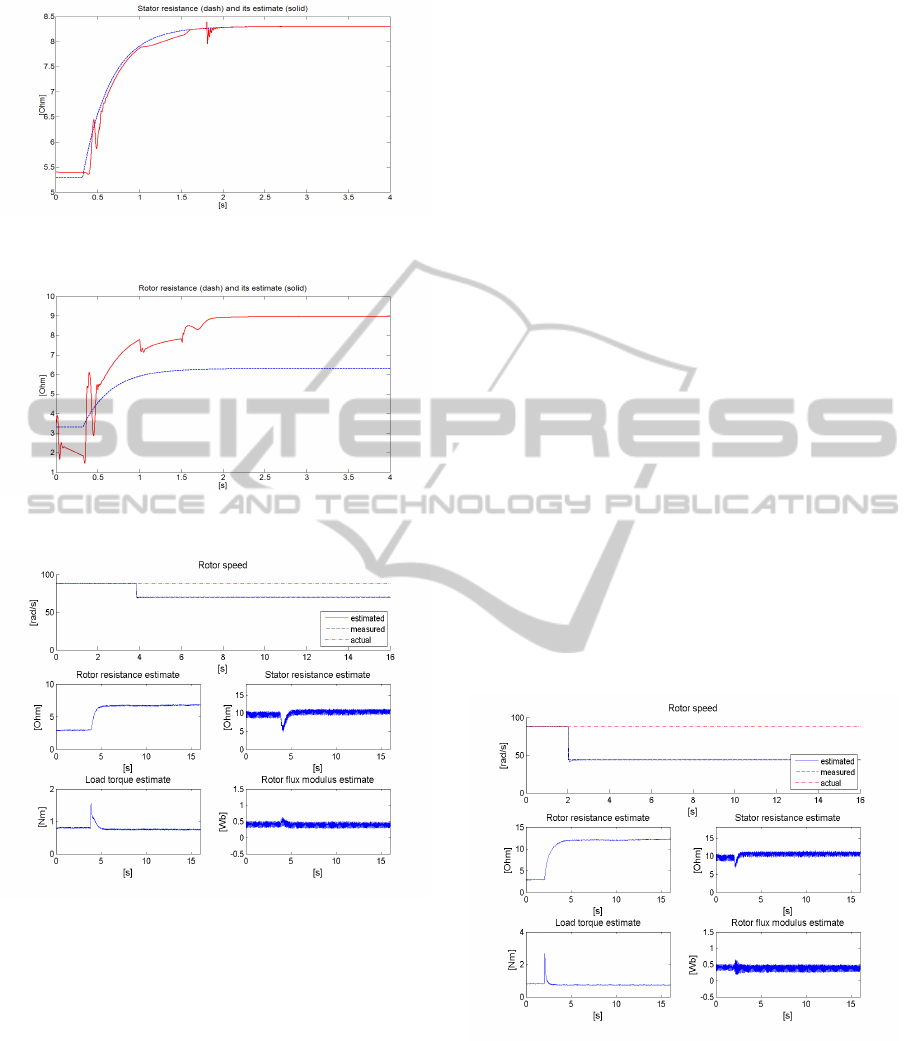
Figure 5: Stator resistance R
s
(dash) and its estimate
ˆ
R
s
(solid).
Figure 6: Observer with no R
s
-adaptation: rotor resistance
R
r
(dash) and its estimate
ˆ
R
r
(solid).
Figure 7: First experimental test (ω
m
= 70 rad/s, ω = 88
rad/s).
(4) with the stator resistance value 5.4 Ohm in place
of
ˆ
R
s
. As illustrated by Figure 6, a non-zero resid-
ual results even in the case of no speed sensor fault:
this is only due to stator resistance uncertainties and
motivates the use of adaptive observers which provide
convergent rotor resistance estimates despite stator re-
sistance uncertainties.
6 EXPERIMENTAL RESULTS
In this section we present the results of three exper-
imental tests which have been carried out with ref-
erence to a 0.25 kW C4T34FB5B Leeson induction
motor driven by a 20 kHz PWM-based open loop
voltage/frequency control (61 V, 16.7 Hz). The ap-
plied load torque, which is proportional to the induc-
tion motor speed, is provided by the WSM-3-32-1
Sangalli Servomotori DC permanent magnet motor
directly connected to the shaft of the induction mo-
tor. The nonlinear adaptive observer (3)-(4) and the
load torque identifier are executed (at 12.5 kHz) when
the motor has reached its steady-state. The nomi-
nal values of the parameters (provided by the man-
ufacturer) L
s
= 0.268 H, L
r
= 0.298 H, M = 0.258
H, J = 0.005 kgm
2
are used, the control gains (all
the values are in SI units) k
i
= 600, k
z
= 3, k
α
= 10,
k
R
= 0.65, k
ω
= 100, k
T
= 5 are chosen while zero ini-
tial conditions, excepting for
ˆ
α(0) and
ˆ
R
s
(0) (equal
to 12.75 s
−1
and 10.45 Ohm) are set. The first test,
whose steady-state results are reported in Figure 7,
involves a partial speed sensor fault (ω
m
= 70 rad/s,
ω = 88 rad/s) occurring at t = 3.84 s. The second
test, whose steady-state results are reported in Figure
8, involves a larger partial speed sensor fault (ω
m
= 44
rad/s, ω = 88 rad/s) occurring at t = 2.02 s. The third
test, whose steady-state results are reported in Figure
9, finally involves a full speed sensor fault (ω
m
= 0
rad/s, ω = 88 rad/s) occurring at t = 1.66 s. All the
three tests confirm the theoretical results presented in
the paper: as expected, the speed sensor fault can be
promptly identified (R
rM
= 6 Ohm) by monitoring the
estimated rotor resistance which converges to α
e
.
Figure 8: Second experimental test (ω
m
= 44 rad/s, ω = 88
rad/s).
7 CONCLUSIONS
A constant non-zero (sufficiently large) difference be-
tween the measured speed and the actual speed may
be on-line identified, even in the presence of uncer-
tainties in load torque and rotor/stator resistances, in
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
64
Figure 9: Third experimental test (ω
m
= 0 rad/s, ω = 88
rad/s).
typical operating conditions involving non-zero load
torque, constant rotor speed and flux modulus. An
adaptive flux observer which incorporates a conver-
gent rotor resistance identifier and relies on the mea-
sured rotor speed and stator currents/voltages is used
to this purpose. A relevant consequence of the pre-
sented analysis is that rotor fluxes (and therefore mo-
tor torque), load torque and stator resistance can be
actually estimated even in the presence of speed sen-
sor faults.
REFERENCES
M. E. H. Benbouzid, D. Diallo, and M. Zeraoulia (2007).
Advanced fault-tolerant control of induction-motor
drives for EV/HEV traction applications: from con-
ventional to modern and intelligent control tech-
niques. IEEE Transactions on Vehicular Technology,
56(2), 519-528.
S. M. Bennet, R. J. Patton, and S. Daley (1999). Sensor
fault-tolerant control of a rail traction drive. Control
Engineering Practice, 7, 217-225.
P. Castaldi, W. Geri, M. Montanari, and A. Tilli (2005). A
new adaptive approach for on-line parameter and state
estimation of induction motors. Control Engineering
Practice, 13(1), 81-94.
D. Diallo, M. E. H. Benbouzid, and A. Makouf (2004). A
fault-tolerant control architecture for induction motor
drives in automotive applications. IEEE Transactions
on Vehicular Technology, 53(6), 1847-1855.
S. X. Ding (2008). Model-based Fault Diagnosis Tech-
niques. Springer, Berlin.
J. Guzinski, H. Abu-Rub, M. Diguet, Z. Krzeminski, and A.
Lewicki (2010). Speed and load torque observer appli-
cation in high-speed train electric drive. IEEE Trans-
actions on Industrial Electronics, 57(2), 565-574.
J. Guzinski, M. Diguet, Z. Krzeminski, A. Lewicki, and
H. Abu-Rub (2009). Application of speed and load
torque observers in high-speed train drive for diagnos-
tic purposes. IEEE Transactions on Industrial Elec-
tronics, 56(1), 248-256.
I.-J. Ha and S.-H. Lee (2000). An online identification
method for both stator and rotor resistances of in-
duction motors without rotational transducers. IEEE
Transactions on Industrial Electronics, 47(4), 842-
853.
S. M. N. Hasan and I. Husain. A Luenberger-sliding mode
observer for online parameter estimation and adap-
tation in high-performance induction motor drives
(2009). IEEE Transactions on Industry Applications,
45(2), 772-781.
R. J. Hill (1994). Electric railway traction. Power Engineer-
ing Journal, 8(3), 143-152.
R. Isermann (2011). . Fault-Diagnosis Applications.
Springer, Berlin.
F. Jadot, F. Malrait, J. Moreno-Valenzuela, and R. Sepul-
chre (2009). Adaptive regulation of vector-controlled
induction motors. IEEE Transactions on Control Sys-
tems Technology, 17(3), 646-657.
S. H. Jeon, K. K. Oh, and J. Y. Choi (2002). Flux ob-
server with online tuning of stator and rotor resis-
tances for induction motors. IEEE Transactions on In-
dustrial Electronics, 49(3), 653-664.
G. Kenn
´
e, R. S. Simo, F. Lamnabhi-Lagarrigue, A.
Arzand
´
e, and J.C. Vannier (2010). An online simpli-
fied rotor resistance estimator for induction motors.
IEEE Transactions on Control Systems Technology,
18(5), 1188-1194.
K.-S. Lee and J.-S. Ryu (2003). Instrument fault detection
and compensation scheme for direct torque controlled
induction motor drives. IEE Proceedings on Control
Theory and Applications, 150(4), 376-382.
R. Marino, S. Peresada, and P. Tomei (2000). On-line sta-
tor and rotor resistance estimation for induction mo-
tors. IEEE Transactions on Control Systems Technol-
ogy, 8(3), 570-579.
R. Marino, P. Tomei, and C. M. Verrelli (2010a). Induction
Motor Control Design. Springer, London.
R. Marino, P. Tomei, and C. M. Verrelli (2008). An adap-
tive tracking control from current measurements for
induction motors with uncertain load torque and rotor
resistance. Automatica, 44(10), 2593-2599.
R. Marino, P. Tomei, and C. M. Verrelli (2010b). Adaptive
output feedback tracking control for induction mo-
tors with uncertain load torque and resistances. Inter-
national Symposium on Power Electronics, Electrical
Drives, Automation and Motion, 419-424, Pisa, June
14-16.
R. Marino, P. Tomei, and C. M. Verrelli (2010c). Tracking
control for sensorless induction motors with uncertain
load torque and resistances. 8
th
IFAC Symposium on
Nonlinear Control Systems, Bologna, September 1-3.
R. Marino, P. Tomei, and C. M. Verrelli (2011). A new flux
observer for induction motors with on-line identifica-
tion of load torque and resistances. 18
th
IFAC World
Congress, 18, Milano, 28 August-2 September.
T. A. Najafabadi, F. R. Salmasi, and P. Jabehdar-Maralani
(2011). Detection and isolation of speed-, DC-link
RotorSpeedSensorFaultDetectioninInductionMotors
65

voltage-, and current-sensor faults based on an adap-
tive observer in induction-motor drives. IEEE Trans-
actions on Industrial Electronics, 58(5), 1662-1672.
H. U. Rehman (2008). An integrated starter-alternator and
low-cost high-performance drive for vehicular appli-
cations. IEEE Transactions on Vehicular Technology,
57(3), 1454-1465.
M. E. Romero, M. M. Seron, and J. A. De Don
´
a (2010).
Sensor fault-tolerant vector control of induction mo-
tors. IET Control Theory and Applications, 4(9),
1707-1724.
A. T¸ iclea and G. Besanc¸on (2006). Observer scheme for
state and parameter estimation in asynchronous mo-
tors with application to speed control. European Jour-
nal of Control, 12(4), 400-412.
H. Wang, S. Pekarek, and B. Fahimi (2006). Multilayer
control of an induction motor drive: a strategic step for
automotive applications. IEEE Transactions on Power
Electronics, 21(3), 676-686.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
66
