Fast Algorithm of Short-time DCT for Low Resolution Signal
Processing
Vitaly Kober
Department of Computer Science, Division of Applied Physics, CICESE,
Carretera Ensenada-Tijuana No. 3918, Ensenada, B.C. 22860, Mexico
Keywords: Discrete Cosine Transform, Fast Algorithm.
Abstract: A fast algorithm for computing the discrete cosine transform (DCT) in a window running on a signal with a
step higher than one is proposed. The algorithm is based on a second-order recursive relation between DCT
spectra computed in windows which are equally spaced with a given distance. The computational
complexity of the proposed algorithm is compared with that of common fast and running DCT algorithms.
A fast inverse DCT transform is also presented.
1 INTRODUCTION
The discrete cosine transform (DCT) is widely used
in many signal processing applications such as
adaptive filtering, video signal processing, feature
extraction, and data compression. This is because the
DCT performs close to the Karhunen-Loeve
transform for the first-order Markov stationary data,
when the correlation coefficient is close to unity
(Jain, 1979).
In many applications, time-varying signals have
inherently infinite length. Since the signal properties
(amplitudes, frequencies, and phases) usually change
with time, a single orthogonal transform is not
sufficient to describe the entire signal. The concept
of short-time signal processing with filtering in the
domain of an orthogonal transform may be utilized
(Oppenheim & Shafer, 1989). A particular case of
the short-time processing is a local signal processing
in the domain of an orthogonal transform calculated
in a running window. The running orthogonal
transform of a signal x
k
can be defined as (Vitkus &
Yaroslavsky, 1987)
()
2
1
,
N
kp
skpn
nN
X
xns
ψ
+
=−
=
∑
,
(1)
where
()
{}
,
ψ
ns
represents the basis of orthogonal
transform functions, k is integer value, p is the step
of the running window, and
kp
s
X
displays the
orthogonal transform coefficients of the signal
around time
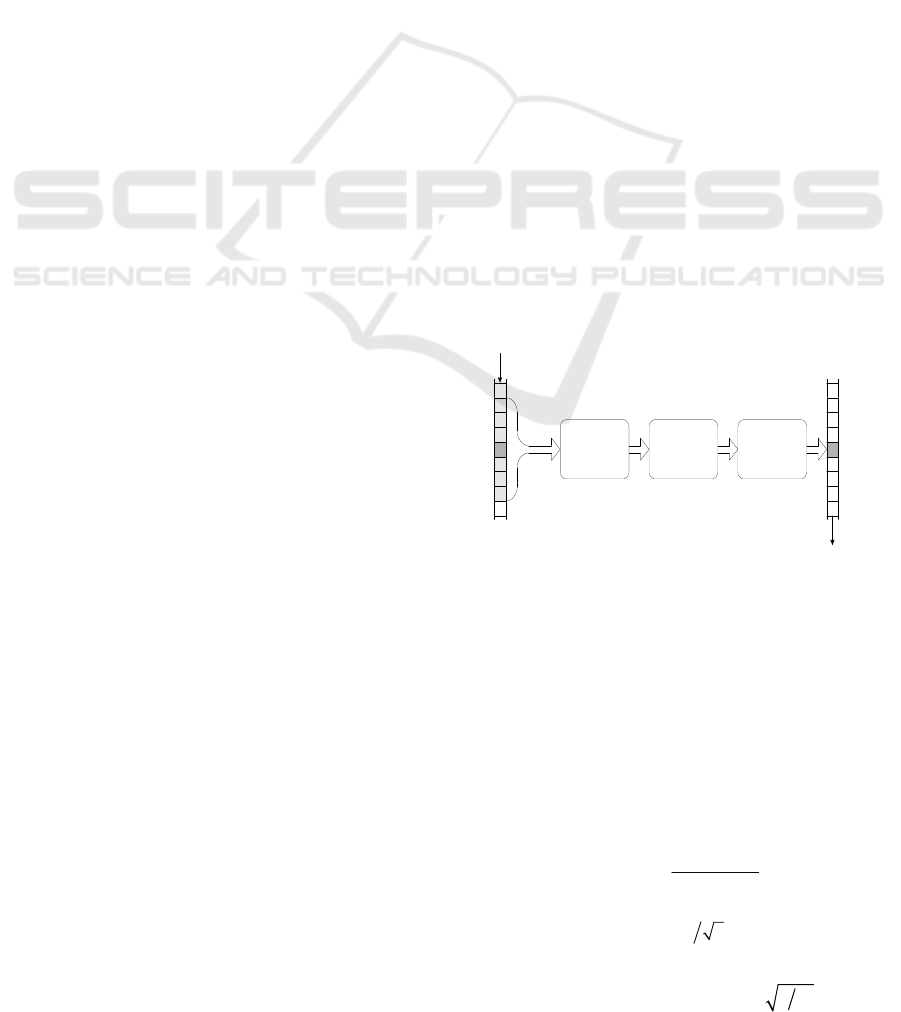
kp. A block-diagram of this processing
is illustrated in Fig. 1.
Figure 1: A block-diagram of local signal processing in
the domain of an orthogonal transform in a running
window.
The choice of orthogonal transform for running
processing depends on many factors. The DCT is
one the most appropriate transforms with respect to
the accuracy of power spectrum estimation from the
observed data that are required for local filtering, the
filter design, and computational complexity of the
filter implementation. The kernel of the DCT for the
order
N is defined as
(2)
where n, s=0,…, N-1,
For clarity, the normalization factor can be
OT Filtering
Inverse
OT
input sequenc
e
output sequence
xn
^
xn
xn-N1
x
n+N2
()
12
π
⎧
⎫
+
⎛⎞
⎪
⎪
=
⎨
⎬
⎜⎟
⎪
⎪
⎝⎠
⎩⎭
/
cos
Ns
sn
DCT k
N
12 0
1
⎧
=
⎪
=
⎨
⎪
⎩
,
,
s
if s
k
otherwise
2 N
71
Kober V..
Fast Algorithm of Short-time DCT for Low Resolution Signal Processing.
DOI: 10.5220/0004017800710074
In Proceedings of the International Conference on Signal Processing and Multimedia Applications and Wireless Information Networks and Systems
(SIGMAP-2012), pages 71-74
ISBN: 978-989-8565-25-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

neglected until the inverse transform. The
computation of the DCT at each position of a
moving window is an intensive task. When the
window moves with a step of one, the shift
properties of discrete sinusoidal transforms may be
used for updating the transform coefficients. The
shift properties of the first-order were derived (Yip
and Rao, 1987). However, this approach is not very
efficient with respect to computational complexity.
The second-order recursive expressions and rapid
algorithms for the computation of the running DCT
with a step of one were suggested (Macias and
Exposito, 1998); (Kober and Cristobal, 1999); (Xi
and Chiraro, 2000); (Kober, 2004). In real
applications, it is often necessary to process a signal
with a high rate and a low resolution; for instance, in
order to obtain preliminary results for further data
analysis. In this case, signal processing in the
domain of the sliding DCT with a given arbitrary
step (higher that one) is appropriate technique.
In this paper, a fast recursive algorithm for
computing the DCT in a window running on a signal
with an arbitrary step with less computation than
that of known recursive and fast DCT algorithms is
proposed. Moreover, intervals for the window step
in which the proposed algorithm is more effective
than the fast DCT algorithms are calculated. A fast
inverse DCT transform is also presented.
2 RECURSIVE ALGORITHM
FOR COMPUTING RUNNING
DCT WITH ARBITRARY STEP
The running DCT with a step of p can be defined as
follows:
(
)
1
2
1
12
cos
π
+
=−
++⎛⎞
=
⎜⎟
⎝⎠
∑
N
skpn
nN
kp
nN s
Xx
N
,
(3)
where {x
k
; k =…, -N
1
, - N
1
+1,…, 0, 1,…, N
2
,
N
2
+1….} is an infinite-length signal,
{}
,0,1,...1=−
kp
s
Xs N
are the transform coefficients
around time
kp, N= N
1
+ N
2
+1 is the length of the
running window. Here N is an arbitrary integer
value. For clarity, the normalization factor and
specific scaling of the
0
kp
X
component are
neglected. The coefficients of the DCT can be
obtained as {
00
2=
kp kp
CX
;
,
kp kp
s
s
CX=
1, ... 1sN=−
}. A recursive relationship between
three consecutive running spectra
2−k
s
X
,
1
−
k
s
X
and
k
s
X
is given by (Kober, 2004)
12kkkk
s
ss s s
X
aX X f
−−
=
−+
,
(4)
where
()
()
(
)
21 1
11 22
1
s
k
skN kN kNkN
fx x x x
−− −− + + −
=−+− − x
(
)
cos 2
s
α
,
(
)
2cos
α
=
s
s
a
, and
π
α
=
s
s
N
.
This is a second-order liner inhomogeneous
difference equation defined on k. The roots of the
corresponding characteristic equation (Kelley &
Peterson, 1991; Mickens, 1990) are equal to
exp( )
λ
α
=
s
s
j and exp( )
γ
α
=
−
s
s
j . After some
manipulations, the general solution of the difference
equation (4) can be expressed as
()
() ( )
() ( )
()() ()()
1
00
1
1
1
001
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
, 0
sin sin
x
sin sin
sin sin sin ,
1, ... 1
k
km kk
sss
m
kk
km
s
m
k
km kk
ss s ssk
m
s
ss
kk
km
ssss
m
kX k k mf X
k
mf s
Xkf mX
X
k
kk f m
sN
αα
αα
ααα
−
++
−
=
−
−+
=
−
++
=
−
−+
=
+− +
=
+−
=
−+
=−
⎧⎛ ⎛ ⎞⎞
⎜⎜ ⎟⎟
⎪
⎝⎝ ⎠⎠
⎪
⎪
⎪
⎪
⎪
⎛⎞
⎪
⎜⎟
⎝⎠
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
∑
∑
∑
∑
,
(5)
where
0
k
s
X
and
1
k
s
X
are initial DCT spectra
computed at arbitrary window positions k
0
and k
1
(k
0
< k
1
), respectively.
Since the window moves on a signal with a step
of p, the local spectra are calculated in equally
spaced window positions kp, where k is integer
value, and k> k
1
. In this case, a recursive relation
between three spectra
(2)−kp
s
X ,
(1)−kp
s
X , and
kp
s
X
can
be obtained from equation (5) as follows:
()
()
()
()
()
()
()
1
(1) (2) (2) 1 1
1
(1) 1
(1) (2)
1
(2) 1 1
1
(1) 1
2
, 0
2cos
sin
sin
sin
,1,...1
sin
p
kp kp kpm kpm
ss s s
m
kp
s
kp k p
kp s s s
s
p
kpm kpm
s
ss
m
s
kp
s
s
s
X
Xffm
fps
XpX
X
m
ff
p
fsN
α
α
α
α
α
−
−− −++−+
+
=
−+
−−
−
−++ −+
+
=
−+
−
++
=
−+
=
++
=−
⎧
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎩
∑
∑
(6)
We see that the computation of the DCT at the
SIGMAP2012-InternationalConferenceonSignalProcessingandMultimediaApplications
72

window position kp involves values of the input
signal x
k
as well as the DCT's coefficients computed
in two previous positions (k-1)p and (k-2)p of the
moving window. If p=1 the recursive equation is
simplified to one given in (4).
The number of arithmetic operations required for
computing the DCT with p>1 at a given window
position is evaluated as follows: if N is odd, the
complexity is N(p+1) multiplication operations and
N(p+1)+5(p-1) addition operations; if N is even,
from the property of symmetry of the functions
()()
(
)( )
sin sin sin sin
αα α α
−−
=
s s Ns Ns
mm
and
() ()
11,1,...1,
−
−=− = −
sNs
sN
1,...=mp, the
computational complexity with respect to
multiplication operations is reduced to N(p+3)/2.
The total number of required arithmetic operations
can be estimated as follows: 2N(p+1)+5(p-1) and
()()
355 1
2
++ −
N
pp
when N is odd and even,
respectively.
Table 1: Comparison of algorithms for computing running
DCT in terms of arithmetic operations flops (real adds and
mults), N=256.
p-step of running
window
Algorithms
Fast DCT Recursive DCT Proposed DCT
1 3708 1024 1024
2 3708 2048 1413
3 3708 3072 1802
4 3708 4096 2191
5 3708 5120 2580
6 3708 6144 2969
7 3708 7168 3358
8 3708 8192 3747
9 3708 9216 4136
The recursive running DCT algorithm (Rosendo
et al., 1998); (Kober and Cristobal, 1999) requires
approximately 4Np arithmetic operations for
computing the DCT spectra in equally spaced
window positions kp. One can observe that the
proposed algorithm with p>1 is more effective than
the use of the sliding recursive algorithm. Table 1
shows numerical results of computational
complexity for the proposed, fast DCT (Johnson and
Frigo, 2007); (Shao and Johnson, 2008), and running
recursive algorithms (Rosendo et al., 1998); (Kober
and Cristobal, 1999) for N=256 when p is varied.
We see that the proposed algorithm yields better
results when the window step p is less than a
boundary value of 8. The boundary values for the
step versus the window length N are provided in
Table 2.
Table 2: Boundary values of the step p for the proposed
algorithm versus N.
N 16 32 64 128 256 512 1024
p 3 4 6 7 8 9 10
The length of a moving window for the proposed
algorithm may be an arbitrary integer value
determined by characteristics of the signal to be
processed.
The inverse algorithms for the sliding DCTs can
be written as follows:
(
)
1
1
0
1
1/ 2
1
2cos
N
ks
s
kk
Ns
xX X
NN
π
−
=
+
=+
⎛⎞
⎛⎞
⎜⎟
⎜⎟
⎝⎠
⎝⎠
∑
,
(7)
where N=N
1
+N
2
+1. The computational complexity is
N multiplication operations and N addition
operations. If x
k
is the central pixel of the window,
that is, N
1
=N
2
and N=2N
1
+1, then the inverse
transform is given by
()
1
20
1
1
21
=
⎛⎞
=−+
⎜⎟
⎝⎠
∑
N
s
ks
s
kk
xXX
N
,
(8)
So, in the computation only the spectral coefficients
with even indices are involved. The computation
requires one multiplication operation and N
1
+1
addition operations.
3 CONCLUSIONS
A rapid recursive algorithm for computing the DCT
in a window running on a signal with an arbitrary
step was proposed. The algorithm is based on a
recursive relationship between three consequent
local DCT spectra which are computed in equally
spaced signal windows. The computational
complexity of the algorithm was compared with that
of common fast and running DCT algorithms.
Intervals for the window step in which the proposed
algorithm is more effective than the fast DCT
algorithms were calculated. The algorithm can be
used for local signal processing with an arbitrary
resolution in the short-time DCT domain.
REFERENCES
Jain, A. K., 1979. ‘A sinusoidal family of unitary
transforms’, IEEE Trans. Pattern Anal. Machine
Intell., vol. PAMI-1, pp. 356-365.
FastAlgorithmofShort-timeDCTforLowResolutionSignalProcessing
73

Johnson, S. G. & Frigo, M. 2007. ‘A modified split-radix
FFT with fewer arithmetic operations’, IEEE Trans.
Signal Process., vol. 55, pp 111-119.
Kelley, W. G. & Peterson, A. C. 1991. Difference
equations. An introduction with Applications,
Academic, New York.
Kober, V. & Cristobal, G., 1999. ‘Fast recursive
algorithms for short-time discrete cosine transform’,
Electronics Letters, vol. 35, pp. 1236-1238.
Kober, V. 2004. ‘Fast algorithms for the computation of
sliding discrete sinusoidal transforms’, IEEE Trans.
Signal Process., vol. 52, pp. 1704-1710.
Mickens, R., 1990. Difference equations, Van Nostrand
Reinhold, New York.
Oppenheim, A. V. & Shafer, R. W., 1989. Discrete-time
signal processing, Prentice Hall, Englewood Cliffs NJ.
Rosendo Macias, J. A. & Gomez Exposito, A., 1998.
‘Recursive formulation of short-time discrete
trigonometric transforms’, IEEE Trans. Circuits. Syst.
II, vol. 45, pp. 525-527.
Shao, X. & Johnson, S. G. 2008. ‘Type-II/III DCT/DST
algorithms with reduced number of arithmetic
operations’, Signal Process., vol. 88, pp. 1553-1564.
Vitkus, R. Y. & Yaroslavsky, L. P., 1987. ‘Recursive
algorithms for local adaptive linear filtration’, in
Mathematical research, eds L.P. Yaroslavsky, A.
Rosenfeld & Wilhelmi, Academy Verlag, Berlin.
Xi, J. & Chiraro, J. F., 2000. ‘Computing running DCT's
and DST's based on their second-order shift
properties’, IEEE Trans. Circuits. Syst. I, vol. 47, pp.
779-783.
Yip, P. & Rao, K. P., 1987. ‘On the shift properties of
DCT’s and DST’s’, IEEE Trans. Acoust., Speech,
Signal Processing, vol. ASSP-35, pp. 404–406.
SIGMAP2012-InternationalConferenceonSignalProcessingandMultimediaApplications
74
