
From a Multi-robot Global Plan to Single-robot Actions
Bernd Br¨uggemann
1
, Elmar Langetepe
2
, Andreas Lenerz
2
and Dirk Schulz
1
1
Research Group “Umanned Systems”, Fraunhofer Institute for Communication, Information Processing and Ergonomics,
Neuenahrer Str 20, Wachtberg, Germany
2
Department of Computer Science I, University of Bonn, Bonn, Germany
Keywords:
Multi-robot Systems, Planning, Plan Execution, Coordination, Algorithmic Geometry.
Abstract:
Planning for and coordinating robots in a multi-robot system (MRS) is crucial for optimizing the performance
of the whole MRS. Thus a plan for the movement of the MRS must exist. If some centralized entity calculates
the plan, it may result in one plan for the whole group. Such a global plan, which shows how the MRS can
reach a goal state, has to be transformed into action guidelines for each robot. This task becomes harder if such
a global plan includes dependencies caused by necessary cooperation of the robots. In this paper we present
an approach to transform a global multi-robot plan into single-robot actions. We also provide a method to
determine how many robots are needed to fulfil the global plan while obeying some constraints. Here we
use plans generated by a coordinated navigation planner with spatial constraints, but the method could be
expanded to a more general class of plans built from a centralized entity.
1 INTRODUCTION
Currently, decentralized planning for multi-robot sys-
tems is known as the more flexible and robust way of
coordinating robots. But often this results in a more
autonomous and a more ”free” behaviour of the sin-
gle robots (see, for example, (Alami et al., 1998)). As
the robots have to coordinate themselves and figure
out how to achieve the goal, their autonomous abil-
ities have to be strengthened. Additionally, the be-
haviour of each robot cannot be predicted in advance
very often. Thus, the operator has to accept that the
robot shows unpredictable behaviour to some extend
(for more information about decentralized MRS see,
for example, (Parker, 2008)).
In most cases such an autonomous decentralized
behaviour of the robots is desirable and benefiting,
especially if the robustness of such approaches is
needed. But there are certain situations imaginable
where the behaviour of the robot group should be as
predictable as possible. In such situations (like dan-
gerous environments where the danger cannot be de-
tected by the robots) a centralized coordination of the
robots may provide advantages.
Another precondition for an advantageous use of
MRS is a proper coordination of the robots. Such co-
ordination often leads to constraints the robots have
to obey. One of the most common constraints a MRS
has to fulfil is to keep up the communication between
the robots. This results in a MRS plan with spatial
and temporal constraints: the robots have to be at a
certain place on a certain time.
In this paper we present a method to determine
how many robots are needed to execute the con-
strained multi-robot global plan and how to transform
it into single actions for each robot. This multi-robot
plan does not only consist of a planned path for the
MRS but also of commands how to follow possible
constraints resulting from the robots’ coordination.
The resulting approach can automatically transform a
certain group of global plans into plans for each robot.
As there are numerous applications and algo-
rithms for centralized multi-robot control, there are
also several ways to deal with the transition of the
general MRS goal into the actions of the single robots.
In (Burgard et al., 2000) a multi-robot system has to
explore an unknown environment. In their approach a
central entity chooses target positions for each robot
by estimating the information gain of those positions.
In (Alami and da Costa Bothelho, 2002) a general
planning framework for a multi-robot system is pre-
sented. Here centralized and decentralized planning
algorithms are combined. The global plan is formu-
lated in a chain of subtasks which can be understood
by the corresponding robots. The tasks can be trans-
formed into robot actions on the robot as they are pre-
defined behaviours. Sanchez and Latombe show that
some problems occur when transferring centralized
419
Brüeggemann B., Langetepe E., Lenerz A. and Schulz D..
From a Multi-robot Global Plan to Single-robot Actions.
DOI: 10.5220/0004016304190422
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 419-422
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
to decoupled planning. In (Sanchez and Latombe,
2002) they show that sometimes a solution cannot be
found because the decoupled planning process loses
the completeness. Although it is not expected that
the decentralized approach fails in general, you can
expect that the solutions will be slightly worse than
the centralized ones. Decoupled planning also often
needs some mechanisms to detect and to solve dead-
locks (like in (Ryan, 2010) or (Kaminka et al., 2010)).
In contrast to global planners which are planning
directly on robot actions our approach introduces an
intermediate step between global planning and local
action execution. This enables the use of global plans
which are better understandable for human operators.
The remainder of the paper is as follows: first,
in section 2, constrained global plans as we are us-
ing them for multi-robot systems are defined and mo-
tivated. As such global plans do not directly re-
port about the resources needed to execute them, we
analyse the question how many robots are needed.
This results in an algorithm which not only gives the
needed number of robots but also a visiting sequence
for the target positions. Section 3 shows the resulting
approach to compute a plan for each robot. We close
the paper with our conclusions and some words about
future work.
2 GLOBAL PLANS
As stated in the introduction, we have to coordinate
the robots to take advantage of the MRS. So in a MRS
the robots can, for example, serve as communication
relays. Thus, to keep up communication to robots far
away from the operator additional robots have to be
placed. The need of robots as relay station can be
viewed in a more general way to allow additional con-
straints besides communication. A centralized plan-
ner for such constrained navigation problems can be
found in (Br¨uggemann and Schulz, 2010). Such an
application leads to a different kind of global plan,
the constrained multi-robot global plan. Here the po-
sition of each robot is chosen so the constraint is not
violated. Each position is either a target position for
one robot or a relay position a robot has to take over.
As such relay positions assure that the constraint is
not violated, a robot is not allowed to move any more
as soon as it is placed there.
As the constraint should not be violated during the
execution of the plan, the order of arrival at the posi-
tions is crucial. Additionally, there are situations in
which the constraint is obeyed between the relay po-
sitions but not at the path in between. In such cases
additional temporary relays are needed. Such tem-
porary relay robots are needed during the movement
of other robots, but when all robots have reached the
next relay position, the temporary relay robots are al-
lowed to move away. An example of such an con-
strained multi-robot global plan can be seen in figure
1.
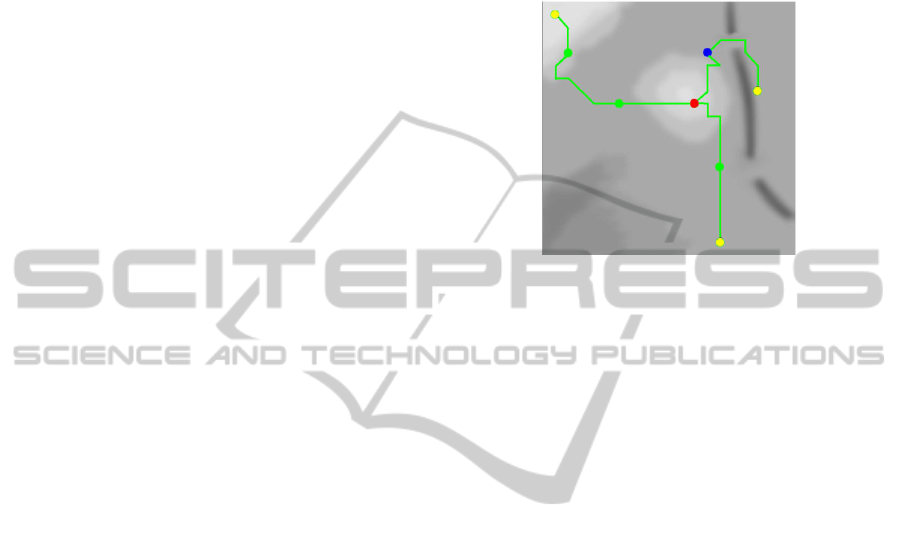
Figure 1: An example of a constrained multi-robot global
plan. The red marker indicates the starting position. The
green markers are relay positions. These are necessary to
keep up the communication between the starting point and
the target positions (yellow markers). The blue marker is
a temporary relay position. To reach the rightmost target
position a robot has to be placed there. If it is taken, a new
task can be assigned to the robot on the temporary relay
position.
3 TRANSFER GLOBAL PLANS
TO LOCAL ACTIONS
To transform the constrained global multi-robot plan
into local robot actions we have to determine at first
how many robots are needed to fulfil the plan without
violating the constraint. As normally the number of
robots is limited within a MRS, we try to minimize
the number of robots needed to execute the plan. This
turns out to be a difficult problem due to the tempo-
rary relay robots. They are needed to get one or more
robots over certain paths of the plan but then can be
used somewhere else. Hence, if there are temporary
relay robots needed ,there are situations in which they
raise the total amount of needed robots and other sit-
uations in which they do not.
To get a more formal view of the problem we re-
formulate the global plan into so called navigation
trees. Here the relay positions are the nodes. Two
nodes are connected if there is a path between them
in the global plan. Each edge in the navigation tree
has a weight equal to the number of temporary relay
positions on the corresponding path. A transforma-
tion of a global plan into a navigation tree can be seen
in figure 2.
With the help of the navigation tree, the problem
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
420
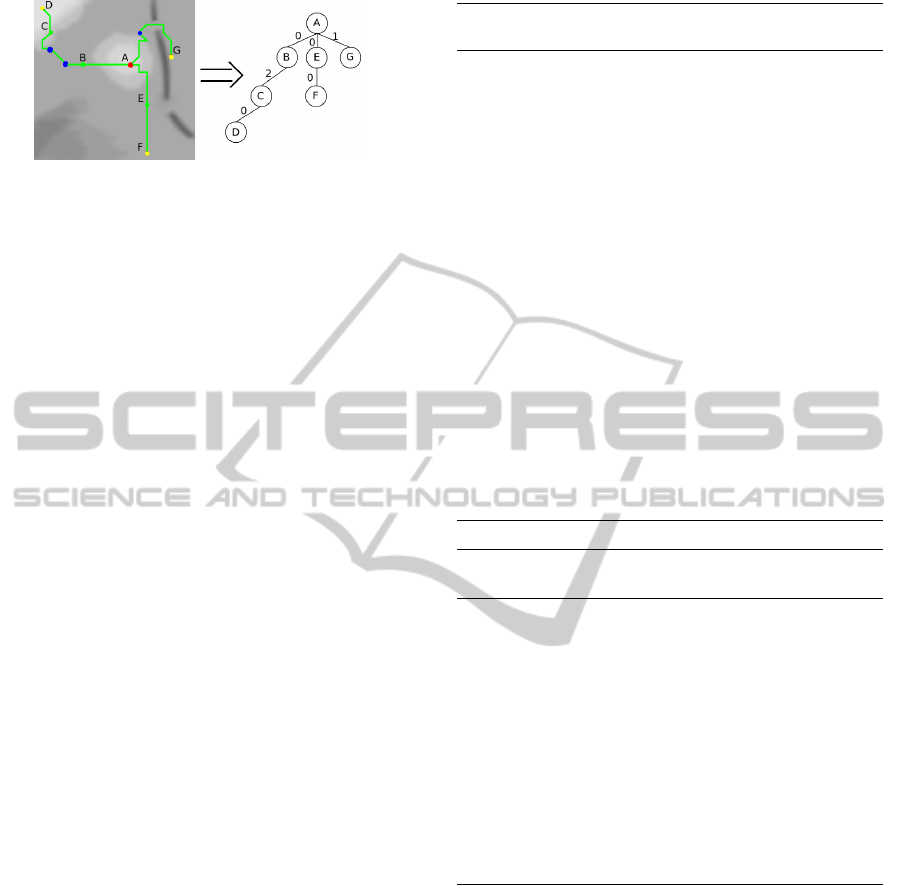
Figure 2: Transformation of a global plan into a navigation
tree.
of finding the lowest number of robots needed for the
global plan can be reformulated as multi-agent graph
traversal problem: Find the lowest number of agents
which are needed to visit every node of the navigation
tree while obeying the following rules:
• If an agent visits an unvisited node, that agent has
to stay there.
• To pass an edge the number of agents must be at
least
– equal to the edge weight if the following node
is already visited, and
– equal to 1 plus the edge weight if the following
node is not yet visited.
A sequence S which obeys the rules above and needs
n robots provides a base for the translation of global
maps into local actions. Additionally, we want to min-
imize n. This results in the following algorithms:
Algorithm 1 computes the number of robots
needed to visit every node in the sub-tree of v
m
and
return to v
m
. The dominating edges are those edges
which have a higher weight than any other edge in
their sub-tree. A cluster is the sub-tree of a dominat-
ing edge. Algorithm 2 computes the minimal number
of robots needed to traverse the navigation tree. The
traversal of the robots can be expressed as a sequence
of leafs visited. Unfortunately, trying out every pos-
sible sequence would result in exponential computing
time. However, it can be shown that all leafs, except
one leaf the robot group stops at, have to be visited
in the descending order of their corresponding domi-
nating edges’ weights. Thus, algorithm 2 counts how
many robots are needed for each leaf taken as the leaf
the robots have to stop at. This not only gives the
minimal number of robots needed to execute the glo-
bal plan but also the visiting order of all target posi-
tions.
With this visiting order and the following notation
we are able to transform the global plan into local
robot actions:
• → A : Go to position A
• A
′
: Wait at position A until the robot which stays
at A arrives
• ||x, y: Wait until the robots with number x and y
have reached the next relay node
Algorithm 1: Count number of robots when returning to
node v
m
.
1: procedure TRAVERSE1(node v
m
)
2: Be v
r
the node the group of agents is at the
moment
3: for every node v
′
6= v
m
on the path π =
v
m
. . . v
r
do
4: if v
′
is not visited before then
5: mark v
′
as visited
6: change m (total robots) and u (robot
available) corresponding to the need of v
′
7: end if
8: end for
9: Let cluster C be the first unvisited cluster in
v
m
10: if u < # nodes in C+ weight of e
m
then
11: m = m + (# nodes in C+ weight of e
m
−u)
12: u = # nodes in C+ weight of e
m
13: end if
14: mark the dominating edge e
m
(C) as visited
15: u = u - # nodes in C+ weight of e
m
16: end procedure
Algorithm 2: Find minimal number of robots needed and
corresponding visiting sequence.
1: procedure TRAVERSE2(node v
m
)
2: for all clusters C
v
in v
m
do
3: mark C
v
as visited
4: TRAVERSE1(v
m
)
5: mark C
v
as unvisited
6: TRAVERSE2(v)
7: if k
opt
> counter then
8: k
opt
= counter
9: end if
10: mark all clusters as unvisited
11: end for
12: end procedure
The two wait commands are necessary to ensure
that no robot violates the constraint given by the con-
strained global map as well as to gather enough robots
to pass the edges. At first we assume that we move all
robots as one group. Then we present an optimization
of the robot actions which results in a parallel execu-
tion of those actions.
To find an optimal visiting sequence, we build the
action guidelineof each robot step by step. Each robot
gets its own plan. The path is split into sub-paths
consisting only of positions and temporary nodes.
Whenever a robot receives the command ”move to X”
”→ X
′
” is added to the action guideline. Please notice
that we always add the command ”wait until robot for
that node is there (’)”. This guarantees that the con-
FromaMulti-robotGlobalPlantoSingle-robotActions
421

Action guidelines:
0 :→ A
1 :→ A
′
→ B
2 :→ A
′
→ B
′
→ tR1||5, 6, 7, 8 → tR2
′
→ tR3
′
→ D
3 :→ A
′
→ B
′
→ tR1
′
→ tR2||5, 6, 7, 8, 2 → tR2
′
→ D
′
→ tR4||4, 5, 6, 7, 8 → v
l,2
4 :→ A
′
→ B
′
→ tR1
′
→ tR2
′
→ tR3||5, 6, 7, 8, 2, 3→ D
′
→ tR4
′
→ v
′
l,2
→ tR4||5, 6, 7, 8→ D
′
→ v
l,1
5 :→ A
′
→ B
′
→ tR1
′
→ tR2
′
→ tR3
′
→ D
′
→ tR4
′
→ v
l,2
→ tR4
′
→ D
′
→ v
′
l,1
→ D
′
→ tR3||8 → tR2
′
→ tR1
′
→ B
′
→ tR5||6, 7, 8 → v
l,3
6 :→ A
′
→ B
′
→ tR1
′
→ tR2
′
→ tR3
′
→ D
′
→ tR4
′
→ v
′
l,2
→ tR4
′
→ D
′
→ v
′
l,1
→ D
′
→ tR3
′
→ tR2||8, 5 → tR1
′
→ B
′
→ tR5
′
→ v
′
l,3
→ tR5||7, 8 → B
′
→ A
′
→ tR6||7, 8 → C
7 :→ A
′
→ B
′
→ tR1
′
→ tR2
′
→ tR3
′
→ D
′
→ tR4
′
→ v
′
l,2
→ tR4
′
→ D
′
→ v
′
l,1
→ D
′
→ tR3
′
→ tR2
′
→ tR1||8, 5, 6 → B
′
→ tR5
′
→ v
′
l,3
→ tR5
′
→ B
′
→ A
′
→ tR1
′
→ C
′
→ tR7||8 → E
8 :→ A
′
→ B
′
→ tR1
′
→ tR2
′
→ tR3
′
→ D
′
→ tR4
′
→ v
′
l,2
→ tR4
′
→ D
′
→ v
′
l,1
→ D
′
→ tR3
′
→ tR2
′
→ tR1
′
→ B
′
→ tR5
′
→ v
′
l,3
→ tR5
′
→ B
′
→ A
′
→ tR6
′
→ C
′
→ tR7
′
→ E
′
→ v
l,4
Figure 3: Resulting action guidelines from the navigation tree in figure 4.
0 1
3 1 1
0
10
v v
v
l,1
l,2
l,3
v
l,4
A
B C
D E
Figure 4: Example navigation tree.
straint is never violated. It also does no harm because,
if the robot for that node is already there, then this
command has no effect.
We also have to deal with temporary relay posi-
tions, which we name tR
x
. While crossing edges with
a weight, a defined number of robots is needed. They
are placed on thetR
x
nodes and have have to stay there
until the whole group reaches the next non-tR
x
node.
After that the temporary robots can also go forward.
The robot farthest away from the position of the group
has to move first, then the second farthest, and so on.
Up to this point we have moved all robots from
the beginning in one group. In most cases this is
not necessary. Thus, we propose an optimizing step
which can be done after calculating the action guide-
lines for the robot group. This optimization uses the
fact that a robot which passes a node v
i
in the di-
rection of the leafs and back without getting at least
one ”||” command in between is not necessary. So all
the commands between two appearances of v
i
can be
removed. However, this remove operation has some
side effects: As the waiting commands ”||” are always
related to the whole robot group, a robot whose action
guideline was partly removed has to be removed from
the waiting lists of the other robots. A resulting plan
transformation can be seen in figure 3.
4 CONCLUSIONS
In this paper we address the problem of transforming
a constrained global multi-robot plan into plans for
each single robot in that multi-robot system. There-
fore, we introduce navigation trees to determine the
minimal number or robots for a general global plan.
This results not only in the minimal number of robots
but also in a visiting sequence for the target positions.
Although the combined approaches, building a global
plan with our planning approach together with the
automatic translation to robot action guidelines are
tested on real robots (on a MRS with up to 6 robots)
an exhaustive evaluation of the performance is nec-
essary. Especially the online optimization via inter-
changing guidelines is a focus of future work.
REFERENCES
Alami, R. and da Costa Bothelho, S. (2002). Plan-based
multi-robot cooperation. In Beetz, M., Hertzberg, J.,
Ghallab, M., and Pollack, M., editors, Advances in
Plan-Based Control of Robotic Agents, volume 2466
of Lecture Notes in Computer Science, pages 65–95.
Springer Berlin / Heidelberg. 10.1007/3-540-37724-
7 1.
Alami, R., Fleury, S., Herrb, M., Ingrand, F., and Robert, F.
(1998). Multi-robot cooperation in the martha project.
Robotics Automation Magazine, IEEE, 5(1):36–47.
Br¨uggemann, B. and Schulz, D. (2010). Coordinated navi-
gation of multi-robot systems with binary constraints.
In 2010 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems. IEEE Computer Society.
Burgard, W., Moors, M., Fox, D., Simmons, R., and Thrun,
S. (2000). Collaborative multi-robot exploration. vol-
ume 1, pages 476–481 vol.1.
Kaminka, G., Erusalimchik, D., and Kraus, S. (2010).
Adaptive multi-robot coordination: A game-theoretic
perspective. In Robotics and Automation (ICRA),
2010 IEEE International Conference on, pages 328–
334. IEEE.
Parker, L. E. (2008). Distributed intelligence: Overview
of the field and its application in multi-robot systems.
Journal of Physical Agents, 2(1).
Ryan, M. (2010). Constraint-based multi-robot path plan-
ning. In IEEE International Conference on Robotics
and Automation.
Sanchez, G. and Latombe, J.-C. (2002). Using a prm
planner to compare centralized and decoupled plan-
ning for multi-robot systems. In Robotics and Au-
tomation, 2002. Proceedings. ICRA ’02. IEEE Inter-
national Conference on, volume 2, pages 2112–2119
vol.2.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
422
