
Semi-static Object Detection using Polygonal Maps for Safe Navigation
of Industrial Robots
Dario Lodi Rizzini, Gionata Boccalini and Stefano Caselli
Dipartimento di Ingegneria dell’Informazione, University of Parma, viale G.P. Usberti 181A, 43124 Parma, Italy
Keywords:
Mapping, Range Sensing.
Abstract:
The collision and safety control of industrial UGVs equipped with laser range finders is often based on con-
servative area-oriented policies that lack in flexibility and does not deal well with non ephemeral environment
changes due to semi-static objects (e.g. passive misplaced objects). In this paper, we propose a method to de-
tect and represent semi-static objects using polygonal local maps in order to improve robot navigation. Each
local map consists of polylines representing the boundary of an object detected inside a safety area. Polylines
are extracted from laser scans and associated with the polylines of a reference map using a similarity measure
criterion. Finally, the map is updated by merging the new polylines. The proposed polygonal representation
allows the recognition of new semi-static obstacles in the environment and supports more flexible policies for
safe navigation. An EKF localizer using artificial landmarks and a fixed path navigation system have been im-
plemented to replicate the navigation system of industrial UGVs. The precision of environment reconstruction
has been assessed with experiments in simulated and real environments.
1 INTRODUCTION
Unmanned Ground Vehicles (UGVs) are more and
more used to manage logistics, individually or in co-
ordinated teams, in industrial plants and warehouses.
Being completely autonomous, these vehicles are
usually equipped with laser range finders to perceive
obstacles and to localize and navigate in the environ-
ment. Laser range finders for localization are usu-
ally mounted on the LGV top to avoid occlusions and
to perceive artificial landmarks with high remission
value that have been previously placed in the envi-
ronment. An Extented Kalman Filter (EKF) local-
izer tracks and estimates the pose of the robot using
the observed landmarks and an a priori map of the
landmarks. Safety lasers (e.g. Sick S300) are usu-
ally placed slightly above floor level for the detec-
tion of any object lying in the proximity of the robot.
One common safety policy consists of partitioning the
space in front of the laser idle, warning and protective
areas. The warning and the protective areas are sup-
posed to be free in normal working conditions so an
appropriate size for the areas must be defined for each
segment of the LGV trajectory. When an object is per-
ceived in the warning area (shown in yellow in bottom
of Figure 1), the UGV slows down according to the
warning. When the protective area (in red in Figure 1)
is not free, the vehicle stops. For any plant operating
with LGVs, the dimensions of warning and protective
areas vary in the different regions of the working en-
vironment. This strict and conservative policy grants
the safety of people and things, but it is inefficient and
inflexible. Sizing the safety areas is a time-consuming
and tedious operation that must be repeated whenever
the environment layout changes. Furthermore, while
it is mandatory that the robot stops when a collision
with a person or an obstacle may occur, the efficiency
of the system is often affected by objects thought-
lessly left in the assumed free space. Although the
area classification scheme has been conceived to en-
sure safety margin in presence of human operators,
the majority of reduction in UGV navigation speed is
actually due to passive misplaced objects. These ob-
jects may be modeled as semi-static objects that do
not belong to the persistent structure of the environ-
ment. Semi-static objects change their location with
low frequency (e.g. after several hours) and while the
robot is not observing them.
In this paper, we propose a method to detect and
represent semi-static objects using polygonal local
maps in order to improve robot navigation. In the pro-
posed solution, the representation of semi-static ob-
jects is assigned to a collection of local maps where
each local map covers a specific path segment. Local
maps are more manageable than a single global map
and can be more easily integrated with the existent
191
Lodi Rizzini D., Boccalini G. and Caselli S..
Semi-static Object Detection using Polygonal Maps for Safe Navigation of Industrial Robots.
DOI: 10.5220/0003989601910198
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 191-198
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
navigation system. Such maps consist of polygonal
lines or, shortly, polylines that represent the bound-
ary of the obstacles found inside the warning and
protective areas. Polygonal representation is mem-
ory and bandwidth inexpensive, compact and seman-
tically rich. A similarity measure is used to asso-
ciate the observed polylines with a preexisting map
for robust detection of semi-static objects. When a
semi-static object is found inside a safety area, the
corresponding local map is updated and the dimen-
sion of the safety areas of the laser range sensor may
be adapted to the reduced free space. Thus, the next
LGV visiting the same region is not forced to slow
down or to stop since the updated area does not con-
tain semi-static object. More advanced and efficient
policies may be implemented by giving up the con-
servative safety area. The proposed approach has
been assessed in simulation and in a real experimen-
tal setup. For this purpose, an EKF localizer based on
landmark and a navigation system have been imple-
mented.
2 RELATED WORK
Research on robot localization and map building early
met the problem of representing dynamics in the en-
vironment. The first and most common approach is
the removal of moving objects when detected. Fox
et al. (Fox et al., 1999) proposed a sensor model
for range finders that can deal with dynamic objects
by modeling them as noise. The work of Wolf et
al. (Wolf and Sukhatme, 2005) is one of the first si-
multaneous localization and mapping (SLAM) meth-
ods that explicitly distinguishes between dynamic en-
tities and static environments using two different oc-
cupancy grid maps. Stachniss et al. (Stachniss and
Burgard, 2005) focus on the semi-static objects, i.e.
objects that infrequently change their location while
the robot is not observing them. Semi-static objects
like doors, parking locations, etc., often define the
discrete state of the environment providing also long-
term semantic information. Recent localization meth-
ods represent static, semi-static and dynamic objects
in the map (Meyer-Delius et al., 2010). The majority
of these techniques are based on an occupancy grid
map, which is suitable to integrate range measure-
ments into a robust representation of the environment,
but it does not carry shape or semantic information
(an object corresponds to a group of cells) and is not
apt to be shared among distributed robots.
Several other works identifies either generic (Katz
et al., 2008) or specific moving entities like peo-
ple (Spinello et al., 2009) from consecutive range
measurements. Tipaldi and Ramos (Tipaldi and
Ramos, 2009) proposed a method performing simul-
taneously scan matching and moving cluster detection
using Conditional Random Fields (CRF). These ap-
proaches are oriented only to the detection and short-
term tracking of people and objects and represent
their targets as clusters of points.
Strict-sense polygonal representations have not
been extensively used for mapping, since a polyline is
a composite element and cannot be represented with
a fixed number of variables as would be convenient
for state estimation algorithms like Bayesian filters.
On the other hand, EKF localization and mapping al-
gorithms often utilize line segment feature maps ac-
cording to models like SP-map models (Arras, 2003).
Latecky et al. (Latecki et al., 2004) illustrated a tech-
niques for integrating the polylines extracted by range
measurements by exploiting shape similarity measure
and scan order.
Laser scan
Polyline
extraction
-0.5
0
0.5
1
1.5
2
2.5
0 1 2 3 4 5 6 7
m
m
-0.5
0
0.5
1
1.5
2
2.5
0 1 2 3 4 5 6 7
m
m
Polyline
association
Polyline
merge
Polyline
join
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
10 10.5 11 11.5 12 12.5 13
m
m
Point of view
P
1
P
2
New polyline points
New polyline
-3
-2.5
-2
-1.5
-1
-0.5
0 0.5 1 1.5 2
m
m
Point of view
P
1
P
2
New polyline points
New polyline
-3
-2.5
-2
-1.5
-1
-0.5
0 0.5 1 1.5 2
m
m
Point of view
P
1
P
2
New polyline points
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
10 10.5 11 11.5 12 12.5 13
m
m
Point of view
P
1
P
2
New polyline points
Map
update
-2
-1.5
-1
-0.5
0
0.5
1
1.5
1 2 3 4 5 6 7 8 9 10
m
m
Warning area
Protective area
Map
Current scan
0
1
2
3
4
0
Robot poses
-0.5
0
0.5
1
1.5
2
2.5
0 1 2 3 4 5 6 7
m
m
P
1
P
0
P
0
P
1
P
2
P
2
P
3
P
3
P
4
P
4
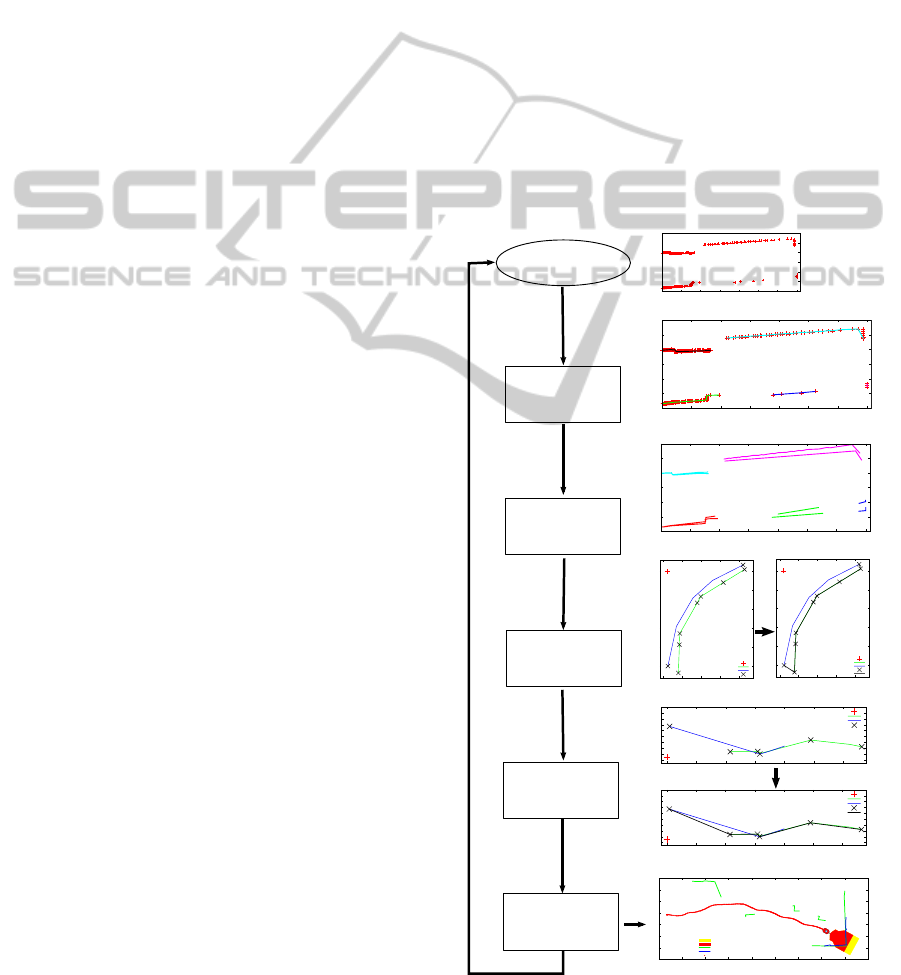
Figure 1: Diagram illustrating the algorithm for building
polygonal maps from laser scans.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
192

3 POLYGONAL MAP
REPRESENTATION
This work aims to detect and track the non ephemeral
changes occurring inside the region of environment
covered by the robot range sensors. The robot moves
along a collection of path segments defined a priori.
On each path segment a specific safety area (consist-
ing of warning and protective areas) is defined to de-
tect potential obstacles without including the static
part of environment. When a stationary entity is de-
tected inside a safety area, the system should record
such semi-static object in a map of the environment.
Instead of managing a single global map, the natu-
ral segmentation of the robot path can be exploited to
cover the working environment with more manage-
able local maps of limited dimensions. The reference
frames of these local maps are anchored to the refer-
ence frame on the path segments.
A local map consists of polygonal lines or poly-
lines that are represented by the list of their vertices.
Polylines are compact geometric features that repre-
sent the countour of obstacles and that can be easily
extracted by laser range scans. Polygonal maps meet
several of the system requirements. First, polylines
require limited storage and bandwidth for their trans-
mission among the LGVs working together in the en-
vironment. Second, the result of polylines extraction
from laser scan is already a segmented set since each
polyline represents an object or a portion of an ob-
ject, though the extraction algorithm must handle er-
rors due to occlusions and sensor noise. Finally, poly-
lines encode shape information that would be implicit
in occupancy grid representations and that can be ex-
ploited for robust data association.
The steps of the algorithm for extracting and inte-
grating the polylines from the laser scan into a consis-
tent map are illustrated in Figure 1. The algorithm ex-
tracts polylines from current laser scan (polyline ex-
traction) and associates them with the polylines con-
tained in the existing map using the similarity mea-
sure (polyline association). Then, the scan polylines
are merged with the associated elements of the map
(polyline merge). Finally, the close polygonal lines
are joined to remove inconsistent and redundant items
(polyline join). In the following, the details of the pro-
posed algorithm are discussed.
3.1 Polyline Extraction
Polylines are extracted from each raw laser range scan
by removing outliers, by splitting the scan into inter-
vals and finally by choosing the vertices of the poly-
lines. Scans are commonly represented as sorted vec-
tors of ranges or, equivalently, of points (symbols r
i
and p
i
will refer to range or Cartesian point hence
after). The implicit angular order of ranges is used
by the standard extraction techniques (Xavier et al.,
2005) as those applied in this work.
First processing step is the statistical out-
lier removal. For each window of ranges
r
i−k
, . . . , r
i
, . . . , r
i+k
centered on i −th range the mean
value µ
i
and standard deviation σ
i
are computed. The
two statistics are used to detect isolated measure-
ments. If the difference between range r
i
and win-
dow mean value µ
i
is greater than a threshold α σ
i
(α is a parameters set by the user), then measurement
i is removed from the scan. The scan is then split
into intervals in correspondence to a strong disconti-
nuity between consecutive ranges. The discontinuity
is detected according to the standard adaptive thresh-
old criterion. The line connecting two consecutive
discontinuous points represents the border of the oc-
cluded region.
Each scan interval corresponds to a polyline repre-
senting an object or a part of an object. All the points
of an interval may serve as vertices of the polyline.
However, when points are approximatively aligned,
the polyline is better represented by a less redundant
list of points. Such result can be easily achieved us-
ing Douglas-Peuker algorithm for curve simplifica-
tion (Douglas and Peuker, 1973). A similar result
could be obtained using the discrete curve evolution
(DCE) proposed in (Latecki et al., 2004).
3.2 Metric for Polylines
The association of polylines belonging to different
sets is a crucial operation for the construction of lo-
cal map and for the detection of the objects that have
been already observed or not yet observed. Associ-
ation is performed on two sets of polylines, i.e. the
polylines extracted from the laser scan and the poly-
lines belonging to the existing local map. Polyline
association requires a metric to measure the likeness
of a single pair of polylines and a procedure to esti-
mate the most consistent joint set of associated pairs.
The latter aspect is discussed in the next section.
In this work, two different metrics are used. The
first one aims at measuring the shape similarity be-
tween two polylines. The second estimates a bound
on the Euclidean distance between the points of two
polylines to validate the similarity. Since the robot
pose can be accurately estimated using a localizer, the
pose of polylines in the map is accurate enough to use
proximity as a validation of data association.
Two simple curves in the plane are perceived as
similar if their tangent vector “turns” in the same way.
Semi-staticObjectDetectionusingPolygonalMapsforSafeNavigationofIndustrialRobots
193

0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
m
m
0
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
m
m
1
0
0.5
1
1.5
2
2.5
3
3.5
0 0.2 0.4 0.6 0.8 1
Hystogram Polyline 0
0
0.5
1
1.5
2
2.5
3
3.5
0 0.2 0.4 0.6 0.8 1
Hystogram Polyline 1
Figure 2: Polyline shape similarity of polyline 0 (top-left)
and polyline 1 (bottom-left) is measured comparing their re-
spective tangent space histograms (top- and bottom-right).
The concept of similarity has been originally formal-
ized in (Latecki and Lakaemper, 1999) for closed
polygons and then extended to polylines (Latecki
et al., 2004). The idea is to compare the normal-
ized tangent histograms of two polylines P
0
and P
1
.
The polygonal curves P
0
s and P
1
s are parameterized
w.r.t. their normalized arclength s ∈ [0, 1]. The tan-
gent function T
P
0
(s) : [0, 1] 7→ [0, 2π] (and T
P
1
(s)) re-
turns the angle between the axis x and the tangent
vector to the polyline in P
0
(s) (and P
1
(s)). Since the
polyline consists of edges and the tangent angle on
each edge is constant, the tangent space function has
the appearance of a histogram. Figure 2 illustrates the
normalized tangent space histograms of two different
polylines. Tangent histogram is invariant to transla-
tion and a rotation applied to a polyline shifts up or
down all the values of the corresponding tangent his-
togram, but the difference between tangent angles re-
mains invariant. Furthermore, tangent histogram is
not affected by the scale of the polylines since it is
parameterized w.r.t. the normalized arc length. Thus,
tangent histograms can be used to define a metric that
is invariant to both rigid motion and scale. Similarity
measure S(P
0
, P
1
) of polylines P
0
and P
1
is formally
defined by equation
s(P
0
, P
1
) =
Z
1
0
(T
P
1
(s) − T
P
0
(s) + θ
0
)
2
ds max
l
1
l
0
,
l
0
l
1
(1)
θ
0
=
Z
1
0
(T
P
1
(s) − T
P
0
(s))ds (2)
where l
0
and l
1
are the lengths respectively of the
polygons P
0
and P
1
and θ
0
is the angle that minimizes
the mean difference between the histograms. The sec-
ond term of equation (1) is introduced to weight the
length of the polylines in the similarity that would
be otherwise invariant to scale. The above integral is
-8.1
-8.05
-8
-7.95
-7.9
-7.85
-7.8
-7.75
-7.7
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0
m
m
Map
Observation
Figure 3: An example of the computation of restricted poly-
lines P
0
|
P
1
and P
1
|
P
0
: the red arrows point out the vertices
of P
0
not belonging to P
0
|
P
1
.
concretely computed on a refinement of the arclength
intervals.
The invariance of similarity measure is clearly an
advantage beacuse repeated observations of the same
object are seldom gathered from the same point of
view. However, if the object shape is ambigous or not
enough distinctive, similarity measure may be mis-
leading. The association procedure defined in the fol-
lowing may attenuate such problem, but a validation
of similarity that takes into account the distance be-
tween polylines should be performed through a proper
metric. Hausdorff distance provides a worst case es-
timate of the distance between two polylines P
0
and
P
1
and is often used to compute the distance between
two composite geometric sets. When two polylines
represent the same object and one of them is ob-
tained from a partial view of the object, the Haus-
dorff distance may overestimate the Euclidean dis-
placement between the polylines. To overcome this
inconvenience we define a metric that compares the
distance of two polylines restricted to the overlap-
ping part. The definition is based on the correspon-
dence between the index order of vertices and the an-
gular order of the original laser scan points that re-
main in the polylines also after several merges. Let
P
0
and P
1
be two polylines respectively with vertices
p
0,0
, p
0,1
, . . . , p
0,n
0
−1
and p
1,0
, p
1,1
, . . . , p
1,n
1
−1
. Let
0
1
i
k
be the index of the segment of P
0
closer to vertex
p
1,k
of polygon P
1
or, formally,
0
1
i
k
, argmin
j=1,...,n
0
−1
d(p
1,k
; p
0, j−1
p
0, j
) (3)
The minimum and maximum indices are defined
as follows
0
1
i
min
= min{
0
1
i
0
, . . . ,
0
1
i
n
1
} and
0
1
i
max
=
max{
0
1
i
0
, . . . ,
0
1
i
n
1
}. Thus, the polyline P
0
|
P
1
re-
stricted to P
1
consists of the vertices p
0i
with i =
0
1
i
min
, . . . ,
0
1
i
max
. Similarly, we define the polyline P
1
|
P
0
restricted to P
0
. Figure 3 illustrates the effect of re-
striction on polylines. Thus, the restricted Hausdorff
distance is defined as the Hausdorff distance of the re-
stricted polylines and can be used to limit the risk of
misleading estimations.
3.3 Polyline Association
The metrics defined in the previous section can be
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
194

used to associate the polylines extracted from the
scan with the polylines contained in the existing lo-
cal map. The natural order of the polylines in the
laser scan can be exploited to reduce the risk of wrong
association. Map polylines can also be dynamically
sorted according to the current viewpoint of the robot.
Such constrained order also reduces the complexity
of data association problem and that be solved us-
ing dynamic programming optimization as suggested
in (Latecki et al., 2004). Let S
i
= {S
0
, S
1
, . . . , S
i
} be
the sorted list of the scan polylines from the first to
the i − th (i = 0, . . . , n) and M
j
= {M
0
, M
1
, . . . , M
j
}
be the sorted list of the map polylines till the j − th
( j = 0, . . . , m). The solution of polyline association
problem restricted to S
i
and M
j
is given by the sorted
list of index pairs A
i j
and the total distance between
the associated polylines is
d(A
i j
) =
∑
(
¯
i,
¯
j)∈A
i j
s(S
¯
i
, M
¯
j
) (4)
where s(·) is the similarity measure of polylines dis-
cussed in previous section. The solution A
i j
is the list
of pairs that minimizes the distance of equation (4)
of the restricted problem. Given two distinct asso-
ciation pairs (i
1
, j
1
), (i
2
, j
2
) ∈ A
i j
the strict condition
i
1
≤ i
2
and j
1
≤ j
2
, briefly (i
1
, j
1
) < (i
2
, j
2
), must hold
(without loosing generality, otherwise swap i
1
with i
2
and j
1
with j
2
). Hence, the best association A
i j
can
be estimated considering the solution of sub-problems
A
i−1, j
, A
i, j−1
and A
i−1, j−1
. In particular, the total dis-
tance of the solution is such that
A
i j
= {(i, j)} ∪ argmin
A
i−1, j
;A
i, j−1
;A
i−1, j−1
d(A ) (5)
Observe that according to the above definition A
i j
contains many-to-many associations. The proce-
dure is iterated until the final association set A
nm
is
achieved. Since at each iteration a new pairs is in-
serted according to equation (5), the final set contains
pairs that have been forcibly included in spite of their
similarity. Thus, the restricted Hausdorff distance can
be used to validate the associations contained in A
nm
by fixing a threshold on the maximum distance.
3.4 Merging Polylines in the Map
Once the polylines from the scan are associated to the
the polylines in the map, the map is updated by merg-
ing the associated polygonal items and by inserting
the unassociated ones. The counterclockwise scan or-
der around the viewpoint discussed previously is also
exploited to merge the polylines. The polylines di-
rectly extracted from a scan are already sorted and
the map polylines are sorted counterclockwise w.r.t.
the current viewpoint. Our algorithm for polyline
merging scans the two sorted lists, while keeping the
pointer P
0
to the current map polyline aligned with
the current scan polyline P
1
. When P
0
and P
1
overlap,
the vertices of polyline P
1
are projected on P
0
(i.e. on
the map) and the resulting merg polyline is smoothed
using Douglas-Peucker algorithm. Otherwise, P
0
and
P
1
are respectively kept or added to the map.
The previously illustrated union of polylines pro-
duces a new collection of polylines from the old lo-
cal map and the features extracted from the scan. The
new map may contains overlapping polylines or small
inconsistencies caused by partial views of the same
object and by inaccuracies in polygon extraction. To
correct such faults and to reduce the size of the map,
such polylines are joined together. First, the poly-
lines are sorted once again according to the same scan
viewpoint order to detect overlapping parts through
a linear scan of the polylines list. The overlapping
items are found using the restricted Hausdorff dis-
tance. Second, the joining method is similar to the
merging algorithm is applied.
4 SEMI-STATIC MAPS
The algorithm described in the previous section can
be used to build a polygonal map from a sequence of
laser scans. For each path segment, the robot keeps
a local map consisting of polylines that contains the
objects found inside the safety areas. Since the aim
of this work is to improve area based policies for in-
dustrial environments, only the polylines that inter-
sect the safety areas are considered. Furthermore, the
proposed technique takes care of merging and join-
ing overlapping polylines. Thus, we can assume that
each polyline represents a distinguishable semi-static
object of the environment.
Every time an UGV visits a region of the envi-
ronment, polylines are extracted from each scan and
associated with the polylines of the local map corre-
sponding to this region. The data association tech-
nique described in section 3.3 is crucial for the de-
tection of environmental changes. In particular, the
similarity measure and the scan order help to identify
the candidate association pairs and the reduced Haus-
dorff distance is used for the validation according to
a validation gate criterion. The results presented in
section 6 show that a convenient acceptance thresh-
old for our experimental setup is slightly above 10 cm.
The unassociated scan polylines are classified as new
semi-static objects and inserted into the local map.
The unassociated polylines in the map are marked as
blank and removed after they have not been not ob-
served for k times.
Semi-staticObjectDetectionusingPolygonalMapsforSafeNavigationofIndustrialRobots
195

The simple semi-static map can be used to define
new navigation policies. In particular, when semi-
static obstacles are detected, the system can reduce
one or both the safety areas (the warning and protec-
tive areas) for the path segments so that no obstacle
lies inside these maps. A less conservative and more
flexible rule could compare the polylines without re-
gard to the areas and classify the obstacle as an al-
ready observed obstacle that can be ignored. How-
ever, the aim of this work is not to define a policy, but
to provide the means for efficiently dealing with non
static environments to the developers of the naviga-
tion system.
5 LOCALIZATION AND
NAVIGATION
5.1 EKF Localization
The standard localization system of industrial LGVs
works with artificial landmarks that can easily de-
tected by laser range scanners due to the remission
value of landmark material. Localization is funda-
mental to perform robot navigation and also to build
the local maps as illustrated in section 3. Navigation
based on path following requires an accurate measure
of pose displacement between the current and the de-
sired pose to perform the proper correction as will be
discussed in the next subsection. A correct estimate of
robot pose allows consistent positioning of the poly-
lines in the local map.
This work aims at assessing the viability and
effectiveness of semi-static object detection in the
working condition of industrial mobile robots. For
this purpose, a localization system based on artificial
landmarks has been setup in our laboratory. Artifi-
cial landarks have been placed in the environment as
shown in Figure 4(a)-(c) and a map containing the
position of landmarks is available. The details of
the experimental setup will be described in section 6.
Given the approximate information about the group
of markers visibile at the robot location, a triangu-
lation algorithm (Esteves et al., 2003) provides the
initial estimate of the robot pose. The algorithm re-
quires three visible landmarks to provide the estimate
of pose since it belongs to the category of three object
triangulation methods. The triangulation also returns
the estimation of covariance matrix representing the
uncertainty on pose.
The Extended Kalman Filter (EKF) is the core
component of the localizer and has the responsibil-
ity of keeping updated the estimate of the robot pose.
The EKF uses a prediction model based on reference
frame transformation rather than a velocity model and
a point-landmark sensor model. In our setup, an iter-
ation of EKF including prediction and correction is
performed in about 40 ms and is rather efficient.
The state of the localizer representing the robot
pose is referred to a unique global reference system
instead of the local map frame. Currently, the local-
izer is completely independent from the map build-
ing component. Such solution is convenient since
it does not interfere with the preexistent localization
system. In future works, the polygonal features of the
local map could be used by the EKF within the ar-
tificial markers, e.g. adopting an extended SP-map
model (Arras, 2003).
5.2 Navigation
A complete navigation system like those described
in the introduction works at different level from the
path planning to reach specific goals. Our aim is only
to partially reproduce the portion of the system re-
quired to build a local map. To this purpose the robot
moves on a fixed path consisting of connected third
order splines so that the complete path is continu-
ous and smooth. Figure 4(right) shows an example
of path represented by a red line. The path following
algorithm used in this paper is the classical chained-
form controller for unicycle robots (Morin and Sam-
son, 2008). The controller require an estimate of the
position and orientation errors x
e
, y
e
and θ
e
expressed
in the robot reference frame. Given the reference val-
ues of linear and angular velocities, respectively u
r,1
and u
r,2
, the control equations are given by
u
1
= u
1,r
− K
1
|u
1,r
|x
e
u
2
= u
2,r
− K
2
u
1,r
y
e
− K
3
|u
1,r
| tanθ
e
(6)
In our experiments we use the following values of
control parameters K
1
= 3, K
2
= 1.5 and K
3
= 1.5.
6 RESULTS
The proposed method for building semi-static maps
has been assessed using both simulation data and ex-
periments in the real environment. The tests have
been performed in two simulated environments (Sim1
and Sim2) and in the hallways of building 1 (Pal1) and
building 3 (Pal3) of the Computer Engineering De-
partment of the University of Parma. In environment
Pal3 two experiments have been executed that are la-
beled respectively as Pal3a and Pal3b. In the latter
experiments, a person moved in front of the robot to
assess how small objects affect the map. The results
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
196
MARKERS
-1
-0.5
0
0.5
1
1.5
2 3 4 5 6 7 8 9 10 11 12
m
m
Building 1 (Pal1)
Warning Area
Protective Area
Mappa
Observation
0
1
2
0
Robot
Markers
(a) (b)
MARKERS
-2
-1.5
-1
-0.5
0
0.5
1
1.5
1 2 3 4 5 6 7 8 9 10
m
m
Building 3 Test B (Pal3b)
Warning Area
Protective Area
Map
Observation
0
1
2
3
4
0
Robot
Markers
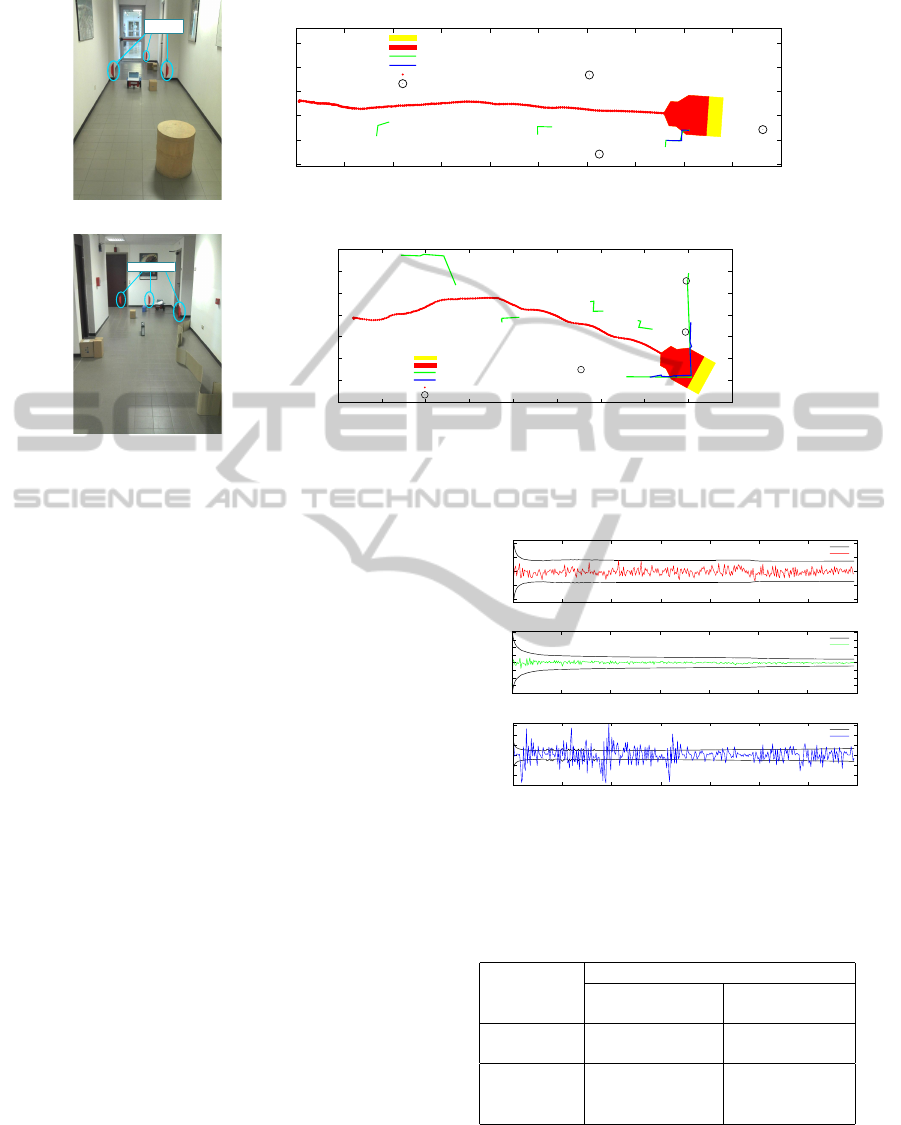
(c) (d)
Figure 4: Pictures of experimental environments in Building 1 (Pal1) (a) and Building 3 (Pal3 (c) and the respective polygonal
maps (b) and (d).
shown in the following are not significantly differ-
ent from those achieved in other environments, even
without a specific filter for dynamic objects. Sim-
ulations have been performed using the MobileSim
simulator provided within the MobileRobots ARIA
library that introduces noise both to odometry and
range finder measurements, although not controlled
by the user. Real experiments have been executed on
a MobileRobots Pioneer 3DX equipped with a Sick
LMS100 laser scanner. Figures 4(a)-(c) illustrate the
real environments Pal1 and Pal3.
In each environment, the robot repeatedly moved
on a fixed path consisting of the union of third or-
der splines. The length of the path is approximatively
9 − 12 m in each test run. Obstacles have been placed
so that, while the robot moves along its trajectory,
such objects partially or totally lie inside the warning
or the protective areas. The measurements collected
during the first transit of the robot are used to build the
local map of each environment that is used as refer-
ence map for the successive acquisitions. During each
next transit, the robot extracts polylines from each
laser scan and associates them to the corresponding
polylines of the reference map according to the pro-
posed algorithm. The new polylines are not merged
into the reference map since the purpose of the ex-
periment is the assessment of the proposed represen-
tation. Figures 4(b)-(d) illustrate the polygonal maps
obtained in the experimental tests Pal1 and Pal3b.
In the simulation tests, the robot pose has been
estimated only by integrating odometry information
-0.01
-0.005
0
0.005
0.01
0 50 100 150 200 250 300 350
correzione x [m]
iterazioni
Deviazione standard x
Correzione x
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0 50 100 150 200 250 300 350
correzione y [m]
iterazioni
Deviazione standard y
Correzione y
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0 50 100 150 200 250 300 350
correzione θ [rad]
iterazioni
Deviazione standard θ
Correzione θ
Figure 5: Corrections performed by the EKF localizer on
state variables x, y and θ during an experiment.
Table 1: Average, minimum and maximum restricted Haus-
dorff distances of the polylines w.r.t. reference maps within
the respective standard deviation for each simulated and real
environment.
Distance [cm]
Environment Mean Std Dev
Avg Min Max Avg Min Max
Sim1 4.71 2.19 6.62 1.89 1.25 2.69
Sim2 4.46 1.20 12.37 2.13 0.91 5.14
Pal1 2.46 1.78 2.86 1.09 0.99 1.16
Pal3a 3.99 2.14 5.94 1.68 0.70 3.18
Pal3b 4.55 2.88 6.86 1.72 1.21 3.45
due to the limitations of the simulator. In particular,
the simulated groundtruth is not directly accessible by
the application and the laser data do not include the
beam remission values making impossible to detect
reflective markers. Thus, the EKF localizer described
Semi-staticObjectDetectionusingPolygonalMapsforSafeNavigationofIndustrialRobots
197

in section 5 can be used only for tests in real environ-
ment. Figure 5 illustrates the trend of the correction
performed by the EKF filter on robot state variables x,
y and θ for a single test run in Pal1 within the corre-
sponding σ-bound computed from the covariance ma-
trix. The value of correction is bound by or compara-
ble to the σ-bound. Similar measures have been per-
formed in all the runs and for all the environments. In
all cases, the standard deviation is less than 6 mm for
position and 0.020 rad for angular variables.
The precision of the polygonal maps is measured
by the restricted Hausdorff distances between the cor-
responding polylines of the reference map and of cur-
rent observation. Table 1 reports the results for the
different environments. For each polyline i of the ref-
erence map, the mean restricted Hausdorff distance
µ
i
and the corresponding standard deviations σ
i
have
been estimated. The results in the table are respec-
tively the average, minimum and maximum values of
mean distances µ
i
and standard deviations σ
i
for all
the polylines. The mean distance and variance in the
simulated environments are greater than in the real en-
vironments. This outcome can be explained with the
high accuracy achieved by the localizer. The overall
error is always less than 10 cm.
7 CONCLUSIONS
In this paper, we have presented a method to build
polygonal local maps that manage semi-static objects
in order to improve the navigation of industrial UGVs.
The maps consists of polylines extracted from laser
scans representing the boundary of objects. The pro-
posed methods extracts, associates and merges the
polylines obtained from the scan into a consistent
map. The proposed data association algorithm is
based on both the shape similarity measure and the re-
stricted Hausdorff distance, a novel metric proposed
in this work. The accurate environment reconstruc-
tion allows the identification of semi-static objects
and the definition of efficient navigation policies. To
replicate the navigation system of industrial UGVs,
an EKF localizer and a fixed path navigation system
have been implemented. Experimental results show
that the error of the reconstruction is smaller than
10 cm. In our future works, we expect to exploit the
polygonal into a complete localization and mapping
algorithm.
ACKNOWLEDGEMENTS
This research is partially supported by SICK SPA.
REFERENCES
Arras, K. O. (2003). Feature-Based Robot Navigation
in Known and Unknown Environments. PhD the-
sis, Swiss Federal Institute of Technology Lausanne
(EPFL), Th
`
ese No. 2765.
Douglas, D. and Peuker, T. (1973). Algorithms for the re-
duction of the number of points required to represent
a digitized line or its caricature. Cartographica: Int.
Jour. for Geographic Information and Geovisualiza-
tion, 10(2):112–122.
Esteves, J. S., Carvalho, A., and Couto, C. (2003). Gen-
eralized geometric triangulation algorithm for mobile
robot absolute self-localization. In Proc. of IEEE
International Symposium On Industrial Electronics
(ISIE).
Fox, D., Burgard, W., and Thrun, S. (1999). Markov lo-
calization for mobile robots in dynamic environments.
Journal of Artificial Intelligence Research, 11:391–
427.
Katz, R., Douillard, B., Nieto, J., and Nebot, E. (2008). A
self-supervised architecture for moving obstacles clas-
sification. In Proc. of the IEEE/RSJ Int. Conf. on In-
telligent Robots and Systems (IROS).
Latecki, L. and Lakaemper, R. (1999). Convexity rule for
shape decomposition based on discrete contour evo-
lution. Computer Vision and Image Understanding,
73(3):441–454.
Latecki, L., Lakaemper, R., Sun, X., and Wolter, D. (2004).
Building polygonal maps from laser range data. In
ECAI Int. Cognitive Robotics Workshop.
Meyer-Delius, D., Hess, Grisetti, G., and Burgard, W.
(2010). Temporary maps for robust localization in
semi-static environments. In Proc. of the IEEE/RSJ
Int. Conf. on Intelligent Robots and Systems (IROS),
Taipei, Taiwan.
Morin, P. and Samson, C. (2008). Motion control of
wheeled mobile robots. In Siciliano, B. and Khatib,
O., editors, Springer Handbook of Robotics, pages
799–826. Springer Berlin Heidelberg.
Spinello, L., Triebel, R., and Siegwart, R. (2009). Multi-
class multimodal detection and tracking in urban en-
vironments. In Proc. of The 7th International Confer-
ence on Field and Service Robotics (FSR).
Stachniss, C. and Burgard, W. (2005). Mobile Robot Map-
ping and Localization in Non-Static Environments. In
Proc. of the National Conference on Artificial Intelli-
gence (AAAI).
Tipaldi, G. and Ramos, F. (2009). Motion clustering and
estimation with conditional random fields. In Proc. of
the IEEE/RSJ Int. Conf. on Intelligent Robots and Sys-
tems (IROS).
Wolf, D. and Sukhatme, G. (2005). Mobile robot simulta-
neous localization and mapping in dynamic environ-
ments. Journal of Autonomous Robots, 19:53–65.
Xavier, J., Pacheco, M., Castro, D., and Ruano, A. (2005).
Fast line, arc/circle and leg detection from laser
scan data in a player driver. In Proc. of the IEEE
Int. Conf. on Robotics & Automation (ICRA).
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
198
