
OLYMPUS: AN INTELLIGENT INTERACTIVE LEARNING
PLATFORM FOR PROCEDURAL TASKS
Aitor Aguirre
1
, Alberto Lozano
1
, Mikel Villamañe
2
, Begoña Ferrero
2
and Luis Matey
3
1
CEIT, Manuel de Lardizábal 15, 20018 San Sebastián, Spain
2
Department of Computer Languages and Systems, University of the Basque Country UPV/EHU, San Sebastián, Spain
3
CEIT and Tecnun, University of Navarra, 20018 San Sebastián, Spain
Keywords: Simulation, Interactive System, Intelligent Tutoring System, Procedural Tasks, Authoring Tool.
Abstract: Providing Interactive Systems with educational capabilities is essential in order to achieve real effectiveness
in simulation based training. However, the development cost of adding intelligence to those systems is huge.
In this paper we present OLYMPUS, a generic learning platform that allows integrating Interactive Systems
with an Intelligent Learning System. The platform is able to diagnose students’ activity while they solve
procedural tasks, it assists them with feedback and helps instructors follow students’ progress with a
monitoring tool. Additionally, OLYMPUS provides the instructional designers with authoring tools to help
them during the knowledge acquisition process.
1 INTRODUCTION
Human beings spend a considerable part of their
lives learning how to carry out every type of
activity. During our lives we acquire different types
of skills, and a lot of them share a common feature:
they are procedural tasks. The learning process of
this type of task is not easy. Sometimes the tasks to
be learned can be dangerous, or they must be
acquired in real environments. Unfortunately, most
of the time the cost of trainings is unaffordable, and
for this reason, the use of Virtual Reality (VR) or
Mixed Reality (MR) based training systems is the
best solution.
In order to achieve real effectiveness, VR
systems need to be combined with Intelligent
Learning Systems (Mellet d’Huart, 2002). This
means Interactive Intelligent Learning Systems
(IILS) are a step ahead of common VR training
systems, because they assist the students in the
learning process of a task or a set of tasks. An IILS
is composed of an Interactive System (IS, an
interface based on VR or MR), and of an Intelligent
Learning System (ILS). The former aims at
achieving faithful reproduction of reality, while the
latter is centered in the instruction and learning
processes. Combining those two, IILSs that are
capable of supporting students in their learning
process are obtained.
Our objective in this work has been to mimic a
real student-expert learning process, that is,
transferring expert knowledge to students. In order
to achieve this, we propose OLYMPUS, a generic
learning platform that has the ability of diagnosing
students’ activity while they solve procedural tasks,
it assists them with feedback when needed and
provides the instructors with a monitoring tool. In
order to give students this intelligent assistance, our
platform’s kernel contains a set of generic modules
that execute a methodological process to give
intelligent feedback in any Interactive System for
training procedural tasks. The process has three
main steps: firstly the events happening in the virtual
environment are observed; then, captured
observations are interpreted, so high level
representation of students’ activity is obtained; and
lastly, the activity is diagnosed in order to detect
students’ errors and possible gaps in their
knowledge. The diagnostic results are used by other
modules of the platform to generate feedback for the
students or by any other educational component that
might be integrated. Still, the amount of information
required for this process is huge and it needs to be
modelled, which usually is a tedious and time
consuming task.
In this paper, we present a general overview of
OLYMPUS, which is composed of a framework that
facilitates the development of IILSs for specific
543
Aguirre A., Lozano A., Villamañe M., Ferrero B. and Matey L. (2012).
OLYMPUS: AN INTELLIGENT INTERACTIVE LEARNING PLATFORM FOR PROCEDURAL TASKS.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 543-550
DOI: 10.5220/0003943605430550
Copyright
c
SciTePress

domains, its runtime kernel, a set of tools that help
to complete the knowledge models required by the
runtime kernel (also known as knowledge
acquisition process), and a monitoring tool that
provides the instructors with visual information
about the students activity. The paper begins
briefing some other relevant related works in the
field of Intelligent Tutoring Systems which have
inspired our work. After that, the learning platform
is described and, next, an example of the knowledge
acquisition process provided by OLYMPUS’ expert
tool for a top-of-the-range truck driving IILS is
presented. Finally the main conclusions are stated
and some of our current lines of reasearch are
indicated.
2 RELATED WORK
The area of Artificial Intelligence (AI) in education
has followed different paradigms of development
throughout history. Among them, during the 80s and
90s, Intelligent Tutoring Systems (ITS) started to
emerge. ITSs are computer systems for intelligent
tutoring which provide many of the benefits of one-
on-one instruction without requiring a tutor for every
student (Bloom, 1984). These systems have also
been integrated with ISs, allowing the students to
“learn by doing” in real world contexts. Since the
first ITSs, three important approaches have been
established: model-tracing tutors (Anderson and
Pelletier, 1991), constraint based tutors (Mitrovic et
al., 2009) and example based tutors (Aleven, 2005).
Constraint based tutors and example based tutors
were developed to reduce the cost of the process of
building an ITS, although it still requires substantial
expertise in AI and programming, and that is why
ITSs are difficult and expensive to build. In order to
avoid this obstacle, authoring systems have been
shown as a successful solutions. Some of them can
build tutors that integrate simulators, but their
simulation capabilities are quite limited. XAIDA
(Wenzel et al., 1999), RIDES (Munro et al., 1997),
VIVIDS (Munro and Pizzini, 1998) and SIMQUEST
(Joolingen and Jong, 1996) can be placed in this
group.
Remolina´s flight training simulator (Remolina,
2004) is a more sophisticated ITS authoring tool. It
is designed for non-programmers so it offers a GUI
to edit task-principles, exercises and student models.
Further, tasks are described by finite state machines
where the situations that the students are going to
face are defined. These state machines are related to
students’ activity, so they are able to discern if the
previously defined learning objectives have been
achieved. Depending on the skills acquired by the
students, the student model will be modified.
Although these features are quite powerful, they
require some programming skills. In addition, the
relation between the authoring tool and the simulator
is high, which involves representing low level
information, and hence, it increases the probability
of generating an incomplete domain model. A
similar approach is followed by The Operator
Machine Interface Assistant (OMIA) (Richards,
2002), which includes a scenario generator tool and
an ITS. The scenarios are edited using a visual
authoring tool, where elements of the simulation are
defined so they can be detected later in the
simulation. It also allows for configuring some
parameters for the ITS. OMIA is capable of
providing automatic diagnosis and, depending on the
exercise definition, it provides students with
enhancements and simulates different discussions
with other crew members.
In recent years, more ITS authoring tools have
been proposed, which address more efficiently the
problems involved on ITS development. CTAT
(Aleven et al., 2006) is composed of a set of
authoring tools that allow creating Example-Tracing
tutors. For this kind of tutor, the author carries out
demonstrations of how the students should solve a
particular problem. CTAT offers tools to implement
student interfaces and to add correct and incorrect
examples of solutions. Using these authoring tools
implies defining each solution separately, which can
be time consuming as the number of possible
solutions increases (eg. environments with a high
grade of unpredictability). With the aim of reducing
the tutor development time, SimStudent (Matsuda et
al., 2007) generalizes authors’ demonstrations, so
not all the possible solutions need to be defined.
ASPIRE (Mitrovic et al., 2009) is another authoring
system for both procedural and non procedural tasks.
The system allows creating domain independent
constraint based ITSs. To achieve this, it provides a
workspace to generate the domain ontology, which
is the base for the author to define the solutions of
the tasks that are going to be learned. These
solutions are defined using constraints, and one of
the advantages of ASPIRE is that it can generate the
constraints automatically. Another domain
independent ITS framework is ASTUS (Paquette et
al., 2010), which focuses its efforts on knowledge
representation. Among its strengths are the capacity
of recognizing the composition of errors made by
the students, the generation of feedback for specific
errors, and the generation of hints and
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
544
demonstrations for specific steps. However, it is
only suitable for well-defined domains, so it can be
difficult to use for ill-defined domains.
OLYMPUS was designed with the objective of
adding educational capabilities to a wide range of
Interactive Systems. In addition, our efforts are
centred on achieving sophisticated knowledge
representation independently from the learning
domain. OLYMPUS allows the instructional
designers to create personalised learning courses.
The platform is composed of various tools: The
Virtual Environment Management Tool allows the
instructional designers to identify objects of the
virtual environment that are interesting for the task
solutions and to define knowledge about them. The
Expert’s Tool lets them create different knowledge
models in order to design tasks for the students, as
well as capture and analyze experts’ activity as an
aid to define the models. In this manner, the IILSs
created with OLYMPUS are able to automatically
diagnose, assist and monitor students while they
perform tasks. In comparison with the above
mentioned ITS authoring tools, OLYMPUS offers a
multi-technique diagnosis module. Thanks to this
feature, different diagnosis techniques can be
integrated depending on the domain where the IILS
is going to be used.
3 OLYMPUS’ ARCHITECTURE
In order to obtain the benefits of a real one-on-one
tutoring, an IILS has to be able to diagnose, give
suitable feedback and monitor students’ activity. In
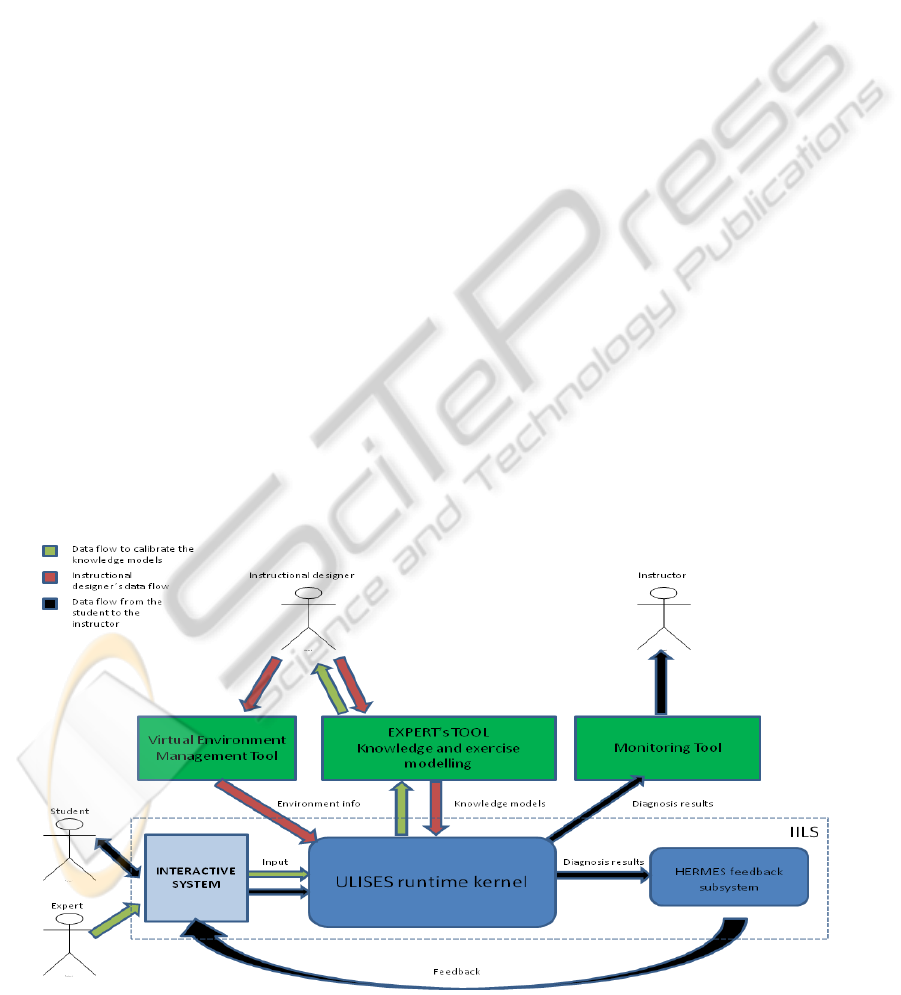
order to attain this, we defined the architecture of
OLYMPUS that is shown in Figure 1. This
architecture involves the complete process from
knowledge acquisition to assisting students during
the tasks, and four different roles can be
distinguished:
• Student: the user to be trained.
• Instructional Designer: the teacher that designs
the tasks.
• Expert: the professional that the instructional
designers capture solving the tasks so they can
define the knowledge models needed by
OLYMPUS.
• Instructor: the one that supervises the students
in the training sessions.
The whole process starts by designing the tasks that
the instructors are going to propose to the students.
This design process is guided by the methodology
defined by ULISES: a generic framework for the
development of IILSs that establishes the
communication process between an Interactive
System and other educational components in three
steps: observation, interpretation and diagnosis. For
the first step, the ULISES framework needs to gather
information from the virtual scene where the tasks
are executed, which will be defined by the
instructional designer with the help of the Virtual
Environment Management Tool. For example, in a
driving simulation environment, various elements of
interest can be defined with this tool: lanes, vehicle
properties (eg. speed, acceleration), road signs, etc.
Figure 1: OLYMPUS architecture.
OLYMPUS: AN INTELLIGENT INTERACTIVE LEARNING PLATFORM FOR PROCEDURAL TASKS
545

Once the observable information is defined,
instructional designers can model the rest of the
knowledge needed by the system. To make this
possible, they have to make use of the Expert’s Tool.
With this tool, instructional designers can capture
the experts’ activity in the IS and thereby, design the
“ideal” knowledge models. Following this process,
the ULISES runtime kernel will be able to generate
diagnosis information that will be delivered to
HERMES, an adaptive and configurable feedback
module that selects feedback messages in real time
in response to the students’ activity.
After the tasks have been modelled, instructors
can launch them and supervise the students through
the Monitoring Tool. As is shown in the student’s
data flow in Figure 1, a student’s activity is sent
from the IS to the ULISES runtime KERNEL, which
generates a diagnosis and transmits the results to the
Monitoring Tool. These results are displayed
graphically in real time to help the instructors follow
and control the training sessions.
In the following sections, the components that
compose OLYMPUS are explained more
thoroughly.
3.1 ULISES Framework
ULISES (Lozano-Rodero, 2009) is a framework for
the development of IILSs. It is the core system of
OLYMPUS, as it defines how the educational
functionalities must be integrated with the IS.
ULISES is based on the natural process that the
teachers follow when they are supervising students.
Firstly they perceive what is happening in their
environment, then they interpret what is happening
out there and lastly they make a diagnosis about
students’ activity. In order to follow this behaviour,
ULISES is based on a metamodel that is divided into
three main abstraction levels: observation,
interpretation and diagnosis levels. These three
levels describe generically the elements that have to
be particularised to describe an IILS. In other words,
the methodology specifies how to observe the
actions being carried out in the interactive system,
how to interpret the steps made by the students and
the context where they are executed, and lastly, how
to diagnose them.
ULISES represents each level of the metamodel
with a corresponding model, thus, the framework
needs to have the observation, interpretation and
diagnosis models. For this reason, ULISES’s
architecture is composed with the corresponding
three subsystems. ULISES runtime kernel
subsystems communicate with the others via multi-
agent architecture, using the FIPA standard of
interoperability. This architecture allows the agents
to exchange information by subscription, request and
query communication protocols.
3.2 HERMES Feedback Subsystem
HERMES is a domain independent feedback system
whose behaviour is customisable to suit the student’s
characteristics and the task’s context (Lopez, 2011).
What is more, it takes advantage of the multimodal
capabilities of ISs. HERMES selects its feedback
based on the diagnosis results generated by ULISES.
This feedback selection process discerns the most
important action among all the actions that are being
executed by a student in a particular moment.
Further, it also determines what the most appropriate
message is, taking into account students’
characteristics. The selection algorithm takes into
account both assimilation of the messages and
educational factors. Besides, the algorithm makes it
possible for HERMES to customise its behaviour to
the characteristics of the domain and to the experts’
preferences.
3.3 Virtual Environment Management
Tool
The objective of the tool is to interactively generate
knowledge associated with the elements in the
training scenarios. To achieve this, three steps need
to be followed according to the following: (1) define
the scene ontology, (2) create the knowledge-mesh
and (3) validate knowledge observation.
1. Firstly, the objects that are going to appear in
the simulation need to be specified. Those
objects are contained in an ontology that is
called scene ontology. This ontology will be
composed of classes and their properties. For
example, if a lane needs to be defined in the IS,
a class will be created for it with its
corresponding properties: maximum speed of
the lane, type of lane, etc.
2. Once the scene ontology is created, the next
step is to define the physical representation of
the objects. This definition is done by assigning
customisable geometries called knowledge-
mesh. Additionally, the simulation
environment can be provided by observers.
Their function is to observe the environment
during a simulation session. To achieve this,
they are equipped with sensors, so when they
collide with an instance of a knowledge-mesh,
the system is able to recognise the object and to
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
546

identify its properties.
3. Lastly, the tool offers the possibility of
validating whether or not all the generated
elements are consistent and if the generated
knowledge satisfies the requirements.
3.4 Expert’s Tool
The main objective of this tool is to give expression
to expert’s knowledge, without requiring any
expertise in AI. As we have seen, ULISES and
HERMES subsystems need some knowledge, which
is provided by the expert’s authoring tool. Regarding
the ULISES framework, interpretation and task
models are two models that need to be defined.
Before explaining these two models, it is
indispensable to refer to the lower layer; the
observation model. The basic unit of this level is the
observation, which describes a fact taking place in
an interval of time. Without defining observations it
would be impossible to define further levels. For
example, if an overtaking in the right lane needs to
be described at the interpretation level, first the lane
change needs to be observed. The definition of the
observation model is done manually taking into
account the ontologies defined in the Virtual
Environment Management Tool, that is,
observations are the link to join the scenario
information with the ULISES framework. However,
making this connection requires some programming
and a simple process needs to be followed, which is
out of the scope of our tools.
One step ahead in the completion of the
knowledge models is the definition of the
interpretation model. Its aim is to represent the
necessary information to guess what actions (steps)
the students are executing in the virtual
environment. To do so, detecting the context where
the actions are being carried out is decisive. For
example, accelerating before a traffic light is not the
same as in an overtaking situation. Therefore, the
authoring tool provides modelling steps and
situations using a constraint based approach. In
domains that are not well structured, events do not
occur in a predictable manner, so temporal
knowledge is not relative. For this reason, the use of
constraints to define relations is an appropriate
solution (Allen, 1983).
Once the steps and situations are modelled in the
interpretation model, that is, once the system is able
to discern what is happening in the IS, the next step
is to state the correction of the actions made by the
students in a given situation. This information is
defined in the Task Model, which is composed in the
following manner: a task is composed of situations,
and each situation has one or many possible
solutions. As has been noted, this framework is
independent of how to define solutions, in other
words, it is independent of the diagnosis technique.
Either way, the solutions define how each step of a
situation is solved correctly or incorrectly. At the
same time, the Task Model will also gather the
necessary information for HERMES.
Defining the information for those two models is
not an easy task. The grade of complexity of the
maneuvers that can occur in the IS is unpredictable.
Thus, the variety of signals that come from the
virtual environment can be high and the relations
and patterns between these signals needs to be
identified in order to generate accurate interpretation
and task models. To give a solution to this problem,
the Expert’s Tool offers a Capturing Tool. Its
objective is to capture experts while they interact in
the IS to monitor their activity in the form of signals
and to show it in the Expert’s tool afterwards.
Further, the tool allows analysing rigorously the
information and establishing patterns between them,
which is a great asset for the definition of the
required models.
3.5 Monitoring Tool
Visualising the diagnosis results is as important as
generating an accurate diagnosis and that is why
OLYMPUS offers another visual resource: the
Monitoring Tool. This tool allows the instructors to
monitor students’ activity in real time. The activity
shows which steps are being executed and in which
situations they are happening. And, what is more,
the monitoring tool indicates if each situation and
step has been carried out correctly or incorrectly.
Figure 2: View of the expert capturing tool.
Although the diagnosis results are showed in real
time (Figure2), when the exercise is completed a
OLYMPUS: AN INTELLIGENT INTERACTIVE LEARNING PLATFORM FOR PROCEDURAL TASKS
547
thorough report of the exercise can be displayed. In
this report, the marks obtained for each situation and
steps can be consulted, as well as information about
the acquisition grade of the learning objectives.
Besides, students’ results from each exercise are
saved for the instructor to follow the progress that
the students are having over time.
4 THE MODELLING PROCESS
WITH THE EXPERT’S TOOL
After having done a general overview of the
different tools that OLYMPUS offers, in this
chapter, examples of how to model a task with the
Expert’s Tool will be described. This tool is the core
tool of OLYMPUS, as it makes the rest of the tools
run. Firstly, it uses the information defined in the
scenario, and then it generates the interpretation and
task models, which feed the ULISES runtime kernel
and HERMES feedback subsystem. In this manner,
HERMES can generate personal feedback for the
students and the Monitoring Tool can show
diagnosis results successfully, which would be
impossible without the Expert’s Tool.
4.1 Defining the Task Model
Defining the Task Model implies that experts think
about the situations that the students are going to
face during their training. In each task the students
will need to acquire certain learning objectives,
which will help the experts to know if the students
are acquiring the desired skills or not. In an
economical driving context, an expert may want to
measure if the students act with sufficient
anticipation when they face a traffic light. In this
case, for example, a TrafficLight situation could be
defined. The next step is more difficult, the solution
or solutions for the TrafficLight situation need to be
defined. In such a context, some possible steps of
interest can be accelerating, breaking and passing
the traffic light. The conditions for this situation are:
• Accelerating when the traffic light is yellow or
red is incorrect if the car is less than 30 metres
from the traffic light.
• Passing the traffic light in red is incorrect.
Once the situation and the steps are identified, the
solution for the situation needs to be specified. As
noted before, these solutions will be diagnosed with
a specific diagnosis technique. As our diagnosis
module allows integrating different diagnosis
techniques, in this case a constraint based approach
has been developed due to the high unpredictability
that a driving context implies. So this time, the
correct steps performance will be modelled with
constraints. The Accelerate step would be defined
with this constraint:
(S.TrafficLightDistance>30.0)
OR
(S.LightState=2.0
AND
S.TrafficLightDistance < 30.0)
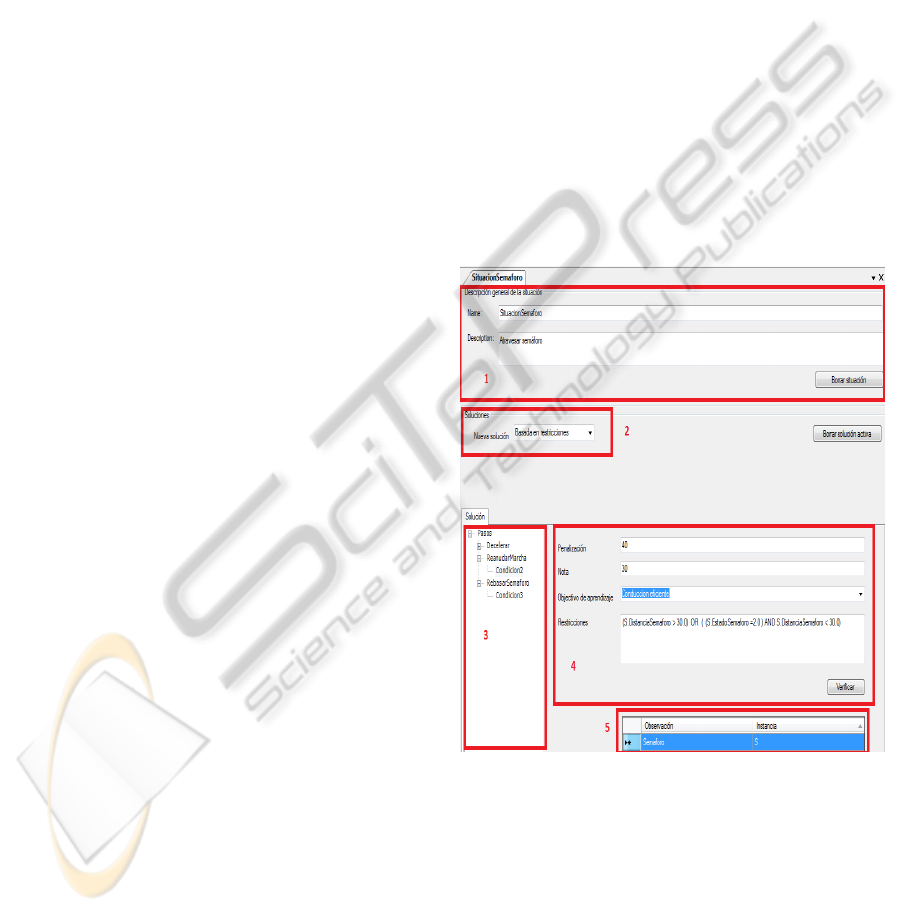
Figure 3 shows the solution definition for the
Accelerate step within the TrafficLight situation. In
order to define a constraint, instances of the
observation will be used. In the constraint definition
for Acceleration just one instance (S) of the
TrafficLight is used. TrafficLightDistance and
LightState are properties of the observation
TrafficLight (S). On the other hand, each constraint
is related to a learning objective, so when an action
is executed by the student, it will affect the
corresponding learning objective.
Figure 3: 1.Name and description of the situation
2.Selection of the diagnosis technique 3.Steps that are
inside a situation (decelerate, accelerate and
passTrafficLight 4.Definition of the constraints and
parameters to calculate the marks related to a learning
objective. 5.Definition of instances.
4.2 Interpreting Students’ Activity
In order to diagnose the correctness of the situations
and the steps that have been defined in the Task
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
548

Model, firstly they have to be interpreted, which is
achieved thanks to the modelling of the steps and
situations in the interpretation model. Following
with the previous example, the situation TrafficLight
and the steps Accelerate, Break and PassTrafficLight
need to be modelled. Unlike the diagnosis module,
the interpretation module always need that its
elements be modelled using constraints. The
interpretation interface allows entering different
types of constraints, as constraints to detect the
starting point of an action as well as its end point. As
the cited steps are easy to model (we just need to
detect if we are breaking, accelerating etc.), a more
complex step is explained to illustrate the definition
of a step: StartCar. For the case of StartCar, the
constraints below will indicate the beginning and
end of the step:
Start constraint: P2 [Meets] P3 AND P3 [Meets] P2
End constraint: P3 [Meets] P2
P2 and P3 correspond to the contact and start
position of the key when the car is going to start.
The meets relation keyword indicates that an
observation (P3) starts at the same time that another
observation (P2) ends.
4.3 Capturing Experts Activity
The design process of interpretation and task models
is a complex task. In order to define the constraints,
the relation between observations and the threshold
values of the observations is unpredictable just by
observing a student while interacting in the virtual
environment. As the experts are the ones that have
expertise in a particular domain, the objective of the
tool is to capture their activity and to model the
necessary models according to their activity. For
example, if the objective is to define correct
overtaking, the expert would have to define
parameters as distance to the car ahead or how to
make a lane change. For this purpose, the Expert’s
tool offers a tool to capture experts and to monitor
their activity. The capturing tool offers interfaces
that can be distributed as graphs and tabs, where the
signals of interest will be placed as best suits.
Furthermore, the tool offers methods to record
sessions, zoom and other features that provide visual
benefits that will let the instructional designers
analyze the observations that interest them.
Once the models have been completed, one last
step remains: their validation. In order to check
whether the results of the generated models are the
desired ones, the Expert’s tool uses the same visual
resource of the monitoring tool. In this manner, the
experts will be able to see if the diagnosis results
meet their criteria.
5 GENERAL DISCUSSION AND
CURRENT WORK
The OLYMPUS platform has been successfully
applied in an IILS for training professional truck
drivers and in another IILS for the training of
mentally challenged people in gardening tasks. Our
IILS paradigm has been shown effective for the
driving and gardening simulation domains where the
unpredictability of the actions carried out by the
students is high. Compared to an ITS authoring tool,
our platform has proven itself capable of saving the
majority of the software development effort.
However, some domain specific software, as
observations, need to be programmed for any
domain. In order to justify this “problem”, some
factors need to be kept in mind. Our platform is not
designed for a specific domain, so we prioritised
preserving the high flexibility of the platform to
avoid eliminating all programming effort. The most
domain specific software in this kind of simulation
based scenarios forces us to program all the cases
that can occur in the simulation context and to write
the code for action/decision correctness evaluation.
In our case, thanks to the Expert’s tool and ULISES,
all this effort is saved.
The constraint based approach used in this work
has provided a good base for the definition of task
models. Still, there have been some situations where
we have missed other diagnosis techniques. For
example, regarding to the truck simulation, in the
case of crossroads the constraint based diagnosis
technique was not sufficient. This is because when a
crossroad is going to be exited, some previous steps
need to be taken into account in order to diagnose
correctly such a situation. Nevertheless, this is not
an unsolvable case; our platform allows integrating
multiple diagnose techniques at the same time. This
hybrid diagnose technique can be really useful in
various domains. In some domains, it is
advantageous to use knowledge discovery
techniques for automatically learning a partial
problem space, but in other cases, as in the driving
domain, it is not suitable.
Although the scenario definition and the
knowledge models definition take a relatively short
time, the Virtual Environment Management Tool
and the Expert’s tool need a learning process. Both
tools have proven themselves easy to use, but due to
the number of features they provide, it takes time
learning to use the tools. In our opinion, it is worth
OLYMPUS: AN INTELLIGENT INTERACTIVE LEARNING PLATFORM FOR PROCEDURAL TASKS
549

spending the time on the familiarisation process with
the tools, due to the huge amount of programming
time that is saved.
At the moment, OLYMPUS has been tested in
the truck driving domain and in the development of
an IILS of gardening tasks for disabled people, so
further evaluation of the platform is needed in order
to test the limits of its generality. While for the
driving domain just the constraint based diagnosis
technique has been implemented, a research avenue
would be to integrate other diagnosis techniques and
in order to take advantage of the benefits of each
technique. For beginners, our intention is to apply
our platform in an ill-defined domain. Completing
solutions with a constraint based solution in ill-
defined domains can be a tedious task, so our
intention is to implement techniques similar to the
ones used in model-tracing tutors in order to
expedite even more the knowledge definition
process for OLYMPUS. Following the same
principle, we are working on automating the
generation of interpretation models by using data
mining methods.
REFERENCES
Aleven, V., Mclaren, B. M., Sewall, J., & Koedinger, K.
R. (2005). Example-Tracing Tutors : A New Paradigm
for Intelligent Tutoring Systems. Human-Computer
Interaction.
Aleven, V., Mclaren, B. M., Sewall, J., & Koedinger, K.
R. (2006). The Cognitive Tutor Authoring Tools
(CTAT): Preliminary Evaluation of Efficiency Gains.
Anderson, J. R., Pelletier, R., (1991). “A Development
System for Model-Tracing Tutors”. In Proceedings of
the International Conference of the Learning Sciences.
Charlottesville.
Bloom, B. S., 1984. “The 2 sigma problem: The search for
methods of group instruction as effective as one-to-
one tutoring”, Educational Researcher, 13(6): 4-16).
Joolingen, W. R., Jong, T. d., (1996). “Supporting the
authoring process for simulation-based discovery
learning”, In Proceedings of European Conference on
Artificial Intelligence in Education, pp. 66-73, Brna.
Lopez-Garate, M., (2011). “Sistema de Selección de
Feedback Adaptativo y Configurable para Sistemas
Interactivos Inteligentes de Ayuda al Aprendizaje”.
Thesis, University of Navarra, Donostia (Spain).
Lozano-Rodero, A., (2009). “Metodología de Desarrollo
de Sistemas Interactivos Inteligentes de Ayuda al
Aprendizaje de Tareas Procedimentales basados en
Realidad Virtual y Mixta”. Thesis, University of
Navarra, Donostia (Spain).
Pizzini, Q., Munro, A., Wogulis, J., Towne, D., (1996).
“The Cost-Effective Authoring of Procedural
Training”. In Proceedings of Intelligent Tutoring
Systems.
Matsuda, N., Cohen, W. W., Sewall, J., Lacerda, G., &
Koedinger, K. R. (2007). Predicting Students ’
Performance with SimStudent : Learning Cognitive
Skills from Observation 1. Learning.
Mellet d’Huart, D., 2002. “Virtual Environment for
Training: An Art of Enhancing Reality”. In Workshops
of the Intelligent Tutoring Systems conference.
Donostia (Spain).
Mitrovic, A., Martin, B., Suraweera, P., Zakharov, K.,
Mcguigan, N., & Zealand, N. (2009). ASPIRE : An
Authoring System and Deployment Environment for
Constraint-Based Tutors. International Journal of
Artificial Intelligence in Education, 19, 155-188.
Munro, A., Jonhson, M., Pizzini, Q., Surmon, D., Towne,
A., Wogulis, J., (1997). “Authoring simulation-
centered tutors with RIDES”, International Journal of
Artificial Intelligence in Education, vol. 8 (3-4), Pp.
284-316.
Paquette, L., Lebeau, J.-françois, & Mayers, A. (2010).
Authoring Problem-Solving Tutors : A Comparison
between ASTUS and CTAT. Advances, (Murray
2003), 377-405.
Remolina, E., Ramachandran, S., & Stottler, R. (2004).
Intelligent Simulation-Based Tutor for Flight Training.
Security, (1743).
Richards, R. A., 2002. Common Cockpit Helicopter
Training Simulator. In AVSIM.
Wenzel, B. M., Dirnberger, M. T., Hsieh, P. Y.,
Chudanov, T. J., Halff, H. M., “Evaluating Subject
Matter Experts’ Learning and Use of an ITS Authoring
Tool”. In Proceedings of the 4
th
International
Conference on Intelligent Tutoring Systems.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
550
