
ANALYSIS OF DEFORMATION PROCESSES
USING BLOCK-MATCHING TECHNIQUES
Alvaro Rodriguez
1
, Carlos Fernandez-Lozano
1
, Jose-Antonio Seoane
1
, Juan R. Rabuñal
1
and Julian Dorado
2
1
Information and Communications Technologies, University of A Coruña, Campus Elviña sn, 15007, A Coruña, Spain
2
Centre of Technological Innovation in Construction and Civil Engineering, University of A Coruña,
Campus Elviña sn, 15007, A Coruña, Spain
Keywords: Computer Vision, Optical Flow, Deformation, Block-matching.
Abstract: Non rigid motion estimation is one of the main issues in computer vision. Its applications range from civil
engineering or traffic systems to medical image analysis. The challenge consists in processing a sequence of
images from of a physical body subjected to deformation processes and extracting its displacement field. In
this paper, an iterative Block-Matching technique is proposed to measure displacements in deformable
surfaces. This technique is based on successive interpolation and smoothing phases to calculate the dense
displacement field of a body. The proposed technique was experimentally validated by studying the
Yosemite sequence and it was tested in the analysis of strength test and biomedical images.
1 INTRODUCTION
The motion estimation in deformable surfaces has
been an issue of continuous major interest in several
areas ranging image diagnosis in medicine, structure
analysis in civil engineering and others.
In a general formulation of the problem, it is
necessary to estimate the motion in a scene in a time
interval Δt. By analysing two frames; I and I’
representing the states in the instants t and t+ Δt.
Optical flow techniques are a field of computer
vision born in the 80s (Horn and Schunk, 1981).
They provide a flexible approach to extract the
motion field of a scene.
A group of these techniques, the Block-Matching
techniques, calculate the displacement from a pair of
images, dividing the first one into small regions or
blocks and finding the correspondence for each block
in the second image using a search range.
Although the Block-Matching techniques are
limited due to the size and shape of the blocks, they
have been applied successfully in several fields such
as civil engineering (Raffel et al. 2000) and in
medical image analysis (Basarab et al. 2007).
Currently it is one of the most robust methods for
extracting the displacement field of a surface without
reference points such as corners or edges.
Several contributions have been made to Block-
Matching techniques. The most important are the
inclusion of pyramidal decomposition techniques to
reduce computational cost and to avoid local minima
(Amiaz et al. 2007), the use of Fourier Transforms
(FTs) and subpixel estimators (Raffel et al. 2000) to
increase accuracy.
More recently, the use iterative warping
techniques have been proposed (Basarab et al. 2007 ;
Raffel et al. 2007), some models to improve the
performance with rotational displacements have been
analysed (Ng et al. 2010) and new similarity metrics
have been proposed (Grewenig et al. 2011).
2 PROPOSED TECHNIQUE
The technique proposed follows the main principles
of any block matching technique. Dividing the image
in non overlapping regular regions called blocks and
solving the correspondence problem for each block
in the next image.
The proposed algorithm calculates the motion
vectors of the scene using an iterative represented in
Fig.1. The main steps of the algorithm are the
following.
1. The sequence of images is acquired with a digital
camera or a similar device.
327
Rodriguez A., Fernandez-Lozano C., Seoane J., Rabuñal J. and Dorado J..
ANALYSIS OF DEFORMATION PROCESSES USING BLOCK-MATCHING TECHNIQUES.
DOI: 10.5220/0003872003270332
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 327-332
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
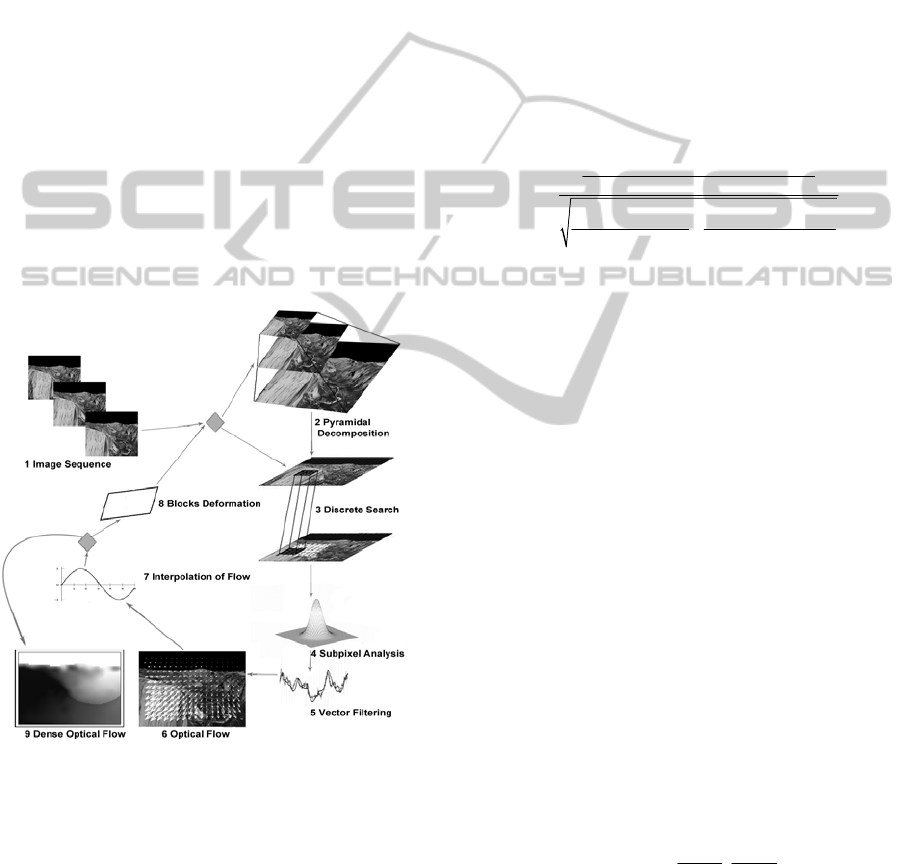
2. The image is downsampled with a standard
pyramidal decomposition algorithm.
3. A similarity metric and a search algorithm are
used to calculate the best discrete displacement.
4. The similarity values are used to perform a fitting
to a 2D Gaussian function with the Levenberg-
Marquardt technique to achieve a subpixel accuracy.
5. The obtained vectors are filtered and smoothed.
6. The optical Flow (formed by the vectors of
displacement for each block) has been obtained.
7. The Optical Flow is processed with an
interpolation algorithm, obtaining the displacements
for each pixel of each block.
8. The blocks are deformed using the information of
the displacement; a new interpolation step is required
to obtain the new blocks from the image. The new
blocks are used to improve the results from the
previous iteration or to estimate the initial position of
the blocks in the next frame.
9. If the last iteration has been performed, The
Dense Deformation Field (the vectors of
displacement for each pixel of the image) has been
obtained.
Figure 1: General scheme of the proposed algorithm.
2.1 Discrete Displacement
To measure the degree of correspondence for each
block of I with another block from I’, the proposed
algorithm uses the statistical similarity of the grey
levels in both regions.
The original block is centered in the point (i, j) in
the image I. After applying a displacement
d(i,j)=(x,y), this block will correspond with the
region centered in (i’,j’) in I’. This is described in (1).
(i', j') = (i + x, j + y) (1)
This approach is based on the assumption
expressed in (2).
I(i, j) + NF = I' (i + x, j + y) (2)
NF being a noise factor following a specific and
unknown statistical distribution, I the original image
and I' the deformed one.
To find the point (i’, j’) a set of candidate blocks
will be defined in I’ using a search range from (i, j).
Therefore, the objective will be to find the candidate
region maximizing a similarity function with the
original one.
In this work, the Pearson's correlation quotient
(R) is used to that end (3).
()
()
(
)
(
)
(
)
()
()
()
()
´´
22
,,´'
(', ')
,´´,´'
N
ij
NN
Iij I i j
N
Rij
Iij I i j
NN
μμ
μμ
−× −
=
−−
×
∑
∑∑
(3)
Where N is the size of the block, µ and µ’ are the
average intensity values of the blocks centered in
I(i,j) and I'(i',j') respectively.
The chosen metric (R) has the advantages of
being invariant to the average gray level and
therefore it is robust in presence of some natural
variability processes such as those present in
common light sources.
2.2 Subpixel Accuracy
The accuracy of the technique presented so far is
limited to the pixel level due to the digital nature of
the images.
However, the correlation value itself contains
some useful information, given that the values
achieved in the pixels surrounding the best value will
reflect one part of the displacement located between
both pixels.
Thus, the correlation can be translated to a
continuous space using a numerical fitting technique.
Here, the two-dimensional Gaussian function defined
in (4) has been used as a continuous model of the
correlation values.
()()
22
22
22
(, )
xy
fxy e
μμ
σσ
λ
⎡
⎤
−−
⎢
⎥
−+
⎢
⎥
××
⎣
⎦
=×
(4)
Being λ, µ
x,
µ
y,
σ
x
and σ
y
the parameters of the
function. This parameters are calculated by
performing a fitting using the Levenberg-Marquardt
(LM) method as defined in (5).
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
328

(
)
() ()
() ()
5
55 55151
11
5
11
,,
...
λλ
... ... ...
,,
...
n
TT
nn n n
nn
n
nn
yy
J
JdIIncJ E
fxy fxy
J
fxy fxy
σσ
×
×× ×××
×
×+×× = ×
⎡⎤
∂∂
⎢⎥
∂∂
⎢⎥
⎢⎥
=
⎢⎥
∂∂
⎢⎥
⎢⎥
∂∂
⎣⎦
(5)
With d
∈
N
+
, d ≠ 0 adjusted for each algorithm
iteration, E is the error matrix, J the Jacobian matrix
of f and Inc the vector of increments for the next
iteration.
The following initial estimation for the function
parameters have been used: λ=max(R
ij
), µx= 0,
µy=0, σx=2 and σy= 2.
The algorithm for updating d is shown in (6).
According to it, the Residual Sum of Squares (RSS)
is calculated from the error matrix (E), so that if the
RSS decreases, the d value is fixed to a constant near
to 0, so the algorithm gets close to the Gauss-Newton
one; in other instances, the d value increases so that
the algorithm behaves as a gradient descent method.
()
()
()
0
110
11
17
1
,2
,2
kkk
kkkk
de
k kMax d dMax FINISH
RSS RSS d d v
RSS RSS d d v v v
−+
−+
=−
⎧
−≥ > ⇒
⎪
⎪
<=−=
⎨
⎪
≥=×=×
⎪
⇒
⎩
⇒
∪
(6)
Where kMax and dMax can be adjusted by the user.
2.3 Vector Filtering
Once the displacement vectors have been calculated,
a vector processing algorithm has been used to
replace the anomalous vectors and to obtain a soft
vector field. This is done in two steps:
1. First, the root mean square (RMS) of the
neighbors of each vector is calculated. If the
difference of this value with the estimated one is
greater than a threshold set by the user, the vector is
replaced by the RMS.
2. Finally, the vector field is smoothed with a
bidimensional Gaussian filter. The default filter uses
a 3x3 sized window.
2.4 Deformation of the Blocks
It should be noted that, if non-rigid displacements are
considered the assumption expressed in (2) is
generally false because neither rotation nor second
order effects are included in the model.
Generally, it can be assumed that if the regions or
blocks are small enough, then the second order
effects may be disregarded and strains can be
calculated from the locally linear displacements in
every region.
If deformations are considered, the objects in the
scene start in an initial non-deformed stage and
develop to a final deformed one. The same principle
can be applied to blocks. They start with a regular
rectangular shape and, using the information from the
measured displacement, the shape of the block can be
changed according to the deformations of the body in
the scene.
Thus, using the vector field obtained in the
previous iteration or from a previous frame of the
scene, a dense displacement field is obtained by
interpolating the motion vectors.
The dense field can be used to obtain the new
positions of the pixels in the block and with this
information a second interpolation step can be used
to obtain the deformed block.
The deformed block is used to improve the
measurement from the previous iteration or to predict
the shape of the surface in the next frame.
In the presented work, bilinear and bicubic B-
spline interpolation methods were used to interpolate
the displacement field and the data of the block
respectively.
3 EXPERIMENTAL RESULTS
3.1 Synthetic Images
The first assay was performed with synthetic images.
In this experiment, the Yosemite synthetic sequence
was used. This is a standard test for benchmarking
optical flow algorithms. It was created by Lynn
Quam (Heeger, 1987) and it was widely studied in
different works (Austvoll, 2005).
Besides, this sequence is one of the best to
perform a evaluation of a Block-Matching algorithm,
since it contains a single surface with a complex
motion, which is the kind of motion where the use
Block-Matching technique makes sense.
This experiment was performed analyzing the
motion between consecutive frames, calculating the
statistics of error according to the true ground data
and using the metrics and methodologies published
in (Scharstein et al. 2007). According to this, the
error was calculated using the dense displacement
field except a border region with a size of 10 pixels
(7).
The obtained results were calculated using non
overlapped blocks of 15x15 pixels and 5 iterations.
An example of obtained results is shown in Fig.2.
ANALYSIS OF DEFORMATION PROCESSES USING BLOCK-MATCHING TECHNIQUES
329
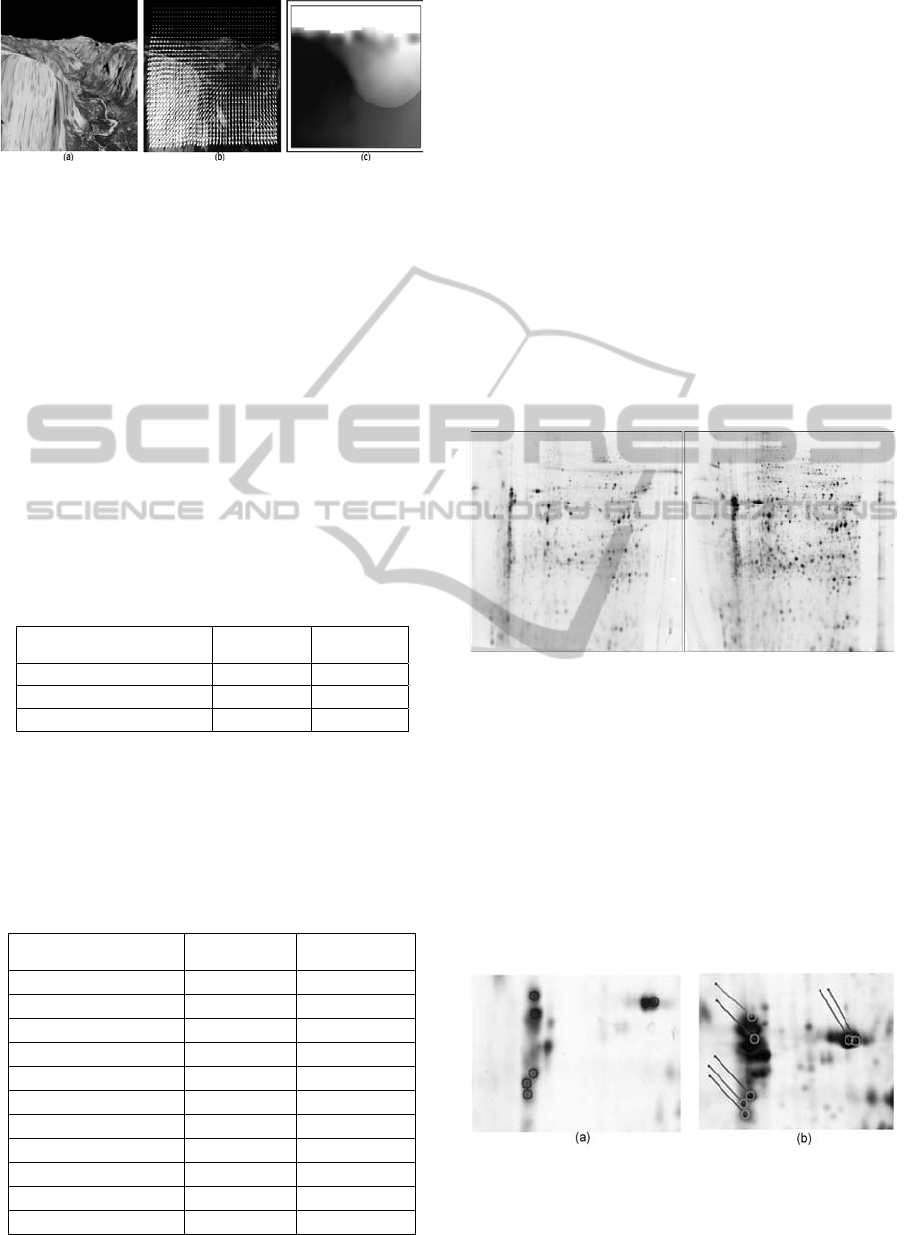
Figure 2: Yosemite experiment. (a) First frame (b) Last
frame and motion vectors of the blocks. (c) Dense motion
field (gray level represents the magnitude of the
displacement).
Table 1 shows the comparative results with other
block matching methods. The following techniques
were used:
1. The DaVis system, from LA Vision (PIV, 2011).
It is a block-matching based technique introduced in
(Raffel et al. 2000) and enhanced in (Raffel et al.
2007). It has been widely used in publications and
experiments in various fields (Deng et al. 2004).
2. The Block-Matching technique provided by the
computer vision library OpenCv available at
(
OPENCV, 2011).
Table 1: Comparative results in the Yosemite sequence
using Block-Matching algorithms.
Algorithm
Average
Error
SSD Error
This Work
0.11
0.11
LaVision (Raffel et al. 2007) 0.26
0.26
OpenCv (OPENCV, 2011)
0.43
0.55
Table 2 shows the results obtained with the
proposed technique compared with those obtained by
the top 15 grayscale algorithms from the Middlebury
Ranking.
Table 2: Comparative results in the Yosemite sequence
using the top 10 grayscale algorithms of the Middlebury
ranking. More results and references are available in [4]
Algorithm
Average
Error
SSD Error
2D-CLG 0.10 0.10
This Work
0.11
0.11
GroupFlow 0.11 0.26
LocallyOriented 0.12 0.11
Ad-TV-NDC 0.12 0.14
Modified CLG 0.12 0.16
Dynamic MRF 0.13 0.14
F-TV-L1 0.13 0.14
Learning Flow 0.14 0.16
Adaptive 0.14 0.17
Nguyen 0.14 0.13
The proposed technique obtained much better
results than the tested block matching technique and
the second best results for grayscale optical flow
algorithms in the Middlebury ranking.
3.2 Application Field: 2D Gel Images
In proteomics, to separate proteins obtained from a
sample the two-dimensional electrophoresis is
commonly used. After the proteins have been
separated, each dark spot represents different kind of
proteins present in the sample and its size depends on
the amount of protein.
In a typical association study, images are
compared in pairs to find differences in proteins of
interest. For this purpose, it is necessary to find the
spot correspondence in the images (Almansa et al.
2007).
Figure 3: Example of two images in a 2D Gel experiment
where it is necessary to find a spot correspondence.
The task is nowadays a bottleneck in the
proteomics research (Voss and Haberl, 2000) and
automatic analysis techniques can improve this
process considerably.
The proposed technique has been used to match
proteins of interest in 2D gel images. With this
purpose blocks were defined using the position of the
proteins in a reference frame and a simple analysis
was performed avoiding the filtering and smoothing
steps. This procedure is shown in Fig.4.
Figure 4: 2D Gel experiment. (a) Reference frame with
marked proteins. (b) Protein displacement to achieve its
final position in test image.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
330

Table 3: Comparative results in proteomics.
Algorithm
Easy Medium Complex
n
cor
n
inc
% n
cor
n
inc
% n
cor
n
inc
%
This Work 204 4 98.1 154 4 97.5 46 9 83.7
Hybrid (Wrz et al. 2008)
203 5 97.6 153 5 96.8 - - -
Intensity (Wrz et al. 2008)
200 8 96.2 150 8 94.9 - - -
Hybrid (Rohr et al. 2004)
201 7 96.6 149 9 94.3 - - -
Intensity (Rohr et al. 2004)
187 21 89.9 137 21 86.7 - - -
The data used in the present work was built using
images extracted from the Wolfson MIC Laboratory
test sequences. In these data, every couple of images
was assigned a complexity level according to the
criterion of an expert.
Obtained results are shown in and summarized in
Table 3. These results were compared with those
published in (Rohr, 2004) and (Wrz et al. 2008)
where the same data is used (although no results with
high complexity images are provided).
Analysing the obtained results, it may be seen
that the success rates obtained with biomedical
images were higher than the rates reached by specific
works using the same data.
3.3 Application Field: Strength Tests
Some of the main needs in Civil Engineering are to
know the stress-strain response of materials used
structures. For this purpose, strength tests are usually
carried out by applying controlled loads or strains to
a test model.
In, strength tests, information about the material's
behavior is traditionally obtained using strain gauges
or extensometers, these devices are expensive or non
reusable and they must be physically linked to the
material interfering with the experiment. Furthermore
these devices provide only information about the
length variation of the structure in a given point and
in a single direction.
The proposed technique can be used to extract the
full displacement field of the body without
considering the points of interest or the main
direction of deformation in the body.
In the next assay, a tensile test was performed
with a cylindrical aluminum bar of 30cm length x
8mm diameter. The experiment was recorded with a
video camera and the calibration technique proposed
in (Zhang, 1999) was used to obtain measurements in
a real scale. Fig.5 and Fig.6 illustrate how
measurements were performed.
A traditional contact extensometer was used in
this assay to compare the obtained results with those
provided by traditional instrumentation.
Figure 5: 2D Gel experiment. (a) Reference frame with
marked proteins. (b) Protein displacement to achieve its
final position in test image.
Figure 6: Displacement vectors estimated during the test
and the extensometer attached to the material.
The vertical strain obtained (expressed in µ
strains) for the section of the aluminum bar where the
extensometer has been attached is shown in Fig.7.
Analysing the obtained results it may be seen that
the proposed technique produces virtually identical
results to those by extensometer.
Figure 7: Graphic of the test with the aluminum. Strain
obtained with the extensometer is shown together with the
strain measured with the proposed technique.
4 CONCLUSIONS
The present paper introduces a new technique to
analyze general deformable displacements in
different surfaces without using displacement or
deformation models.
The obtained results show that the proposed
technique can retrieve the complete displacement
field of a surface, obtaining accurate and robust
results.
ANALYSIS OF DEFORMATION PROCESSES USING BLOCK-MATCHING TECHNIQUES
331

In the analysis of 2D gel images better results
than specific works in the field were obtained and in
the analysis of strength test the same precision as
traditional devices was obtained avoiding the
limitations of contact sensors.
ACKNOWLEDGEMENTS
This work was partially supported by the General
Directorate of Research, Development and Innovation of
the Xunta de Galicia (Ref. 08TMT005CT), grant
(Ref.10SIN105004PR) funded by Xunta de Galicia and
Consellería of Economy and Industry of the Xunta de
Galicia (Ref. 10MDS014CT).
REFERENCES
Almansa A, Gerschuni M, Pardo A and Preciozzi J: 2007.
Processing of 2D Electrophoresis Gels Iccv -
Workshop on Computer Vision Applications for
Developing Countries.
Amiaz T, Lubetzky E and Kiryati N: 2007. Coarse to
overfine optical flow estimation.Pattern Recognition.
40(9):2494-1503.
Austvoll I: 2005. A study of the yosemite sequence used as
a test sequence for estimation of optical flow. Lecture
Notes in Computer Science. 3540(2005):659-668.
Baker S, Scharstein D and Lewis JP. Middlebury
computer vision pages, an evaluation of optical flow
algorithms. http://vision.middlebury.edu/ow/eval.
(Accessed: 2011).
Basarab. A, Aoudi W, Liebgott H, Vray D and Delachartre
P. Parametric Deformable Block Matching for
Ultrasound Imaging. IEEE International conference
on Image Processing. (2007).
Deng Z, Richmond MC, Guest GR and Mueller RP: 2004.
Study of Fish Response Using Particle Image
Velocimetry and High-Speed, High-Resolution
Imaging, Technical Report PNNL-14819.
Grewenig S, Zimmer S and Weickert J: 2011. Rotationally
invariant similarity measures for nonlocal image
denoising. Journal of Visual Communication and
Image Representation. 22(2):117-130.
Heeger D: 1987. Model for the extraction of image flow.
Journal of the Optical Society of America A: Optics,
Image Science, and Vision 4(1987):1455–1471.
Horn BKP and Schunk BG: 1981. Determining optical
flow. Artificial Intelligence 17:185-203.
Ng KH, Po LM, Cheung KW and Wong KM: 2010.
Block-Matching Translational and Rotational Motion
Compensated Prediction Using Interpolated Reference
Frame. Journal on Advances in Signal Processing.
OPENCV. Open Source Computer Vision.
http://opencv.willowgarage.com (Accessed: 2011).
PIV. Particle image Velocimetry. http://www.piv.de
(Accessed: 2011).
Raffel M, Willert C and Kompenhans J: 2000. Particle
image velocimetry, a practical guide. Springer, Berlin.
Raffel M, Willert C and Kompenhans J: 2007. Particle
image velocimetry, a practical guide, Second Edition.
Springer, Berlin.
Rohr K, Cathier P and Wrz S: 2004. Elastic registration of
electrophoresis images using intensity information and
point landmarks. Pattern Recognition 37:035-1048 .
Scharstein D, Baker S, and Lewis JP: 2007. A database
and evaluation methodology for Optical Flow. ICCV.
Voss T and Haberl P: 2000. Observations on the
reproducibility and matching effciency of two-
dimensional electrophoresis gels: consequences for
comprehensive data analysis. Electrophoresis
21:3345-3350.
Wrz S, Winz M and Rohr K: 2008. Geometric alignment
of 2D gel electrophoresis images using physics-based
elastic registration. IEEE International Symposium on
Biomedical Imaging: From Nano to Macro.
Zhang: 1999. Flexible Camera Calibration by Viewing a
Plane From Unknown Orientations. IEEE International
Conference on Computer Vision. 1: 666-673.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
332
