
MULTIMODALITY AND MULTIRESOLUTION IMAGE FUSION
Paul M. de Zeeuw, Eric J. E. M. Pauwels and Jungong Han
Centrum Wiskunde & Informatica, P.O. Box 94079, NL–1090 GB, Amsterdam, The Netherlands
Keywords:
Multimodality, Multiresolution, Image Fusion.
Abstract:
Standard multiresolution image fusion of multimodal images may yield an output image with artifacts due to
the occurrence of opposite contrast in the input images. Equal but opposite contrast leads to noisy patches,
instable with respect to slight changes in the input images. Unequal and opposite contrast leads to uncertainty
of how to interpret the modality of the result. In this paper a biased fusion is proposed to remedy this, where
the bias is towards one image, the so-called iconic image, in a preferred spectrum. A nonlinear fusion rule
is proposed to prevent that the fused image reverses the local contrasts as seen in the iconic image. The rule
involves saliency and a local match measure. The method is demonstrated by artificial and real-life examples.
1 INTRODUCTION
Image fusion seeks to combine images in such a way
that all the salient information is put together into
(usually) one image suitable for human perception or
further processing. One can roughly divide the field
into two categories: monomodal and multimodal im-
age fusion. An example of the need for the first can
be found in light microscopy where one encounters
the problem of limited depth-of-field, i.e. only part
of the specimen under consideration will be in focus.
By fusing multiple images with different focus one
acquires an image which has overall focus.
Examples of multimodal imaging are found in the
realm of medical imaging where one seeks to com-
bine CT with MRI images, or PET with MRI images.
Another important example is surveillance imaging
where often one and the same scene is recorded by
cameras operating with different modalities like vi-
sual and infrared (viz. SWIR, MWIR and LWIR).
Typically, in pairs of images opposite contrast may
occur, e.g. see the poles in the top images of Fig-
ure 5. In this paper, we elaborate upon multimodal
image fusion by multiresolution-methods. The latter
requires that images that have to be fused are reg-
istered (aligned). Already the registration of mul-
timodal images requires an approach different from
the case of monomodal images. Registration based
on features like lines and contours appear more suit-
able for such images than registration based on corre-
lation of intensity values, e.g. see (Zitov
´
a and Flusser,
2003) and references therein (recently also (Han et al.,
2011)). We confine ourselves to the mere fusion part.
Section 2 provides a brief recapitulation of the mul-
tiresolution aspects. Section 3 elaborates in detail on
the proposed (biased) fusion rule. This rule is irre-
spective of the particular multiresolution scheme and
of the activity measure.
2 MULTIRESOLUTION IMAGE
FUSION
There exist various categories of techniques for im-
age fusion, but we merely consider methods by means
of the multiresolution (MR) approach. It is founded
on the observation that multiresolution decomposition
of an image allows for localization of features at the
proper scale (resolution). Early proofs of principles
already exist (Burt and Kolczynski, 1993; Li et al.,
1995). The basic idea is demonstrated by Figure 1 (cf.
(Piella, 2003a, Figure 6.6)). At the decomposition
stage the input images (i
A
, i
B
) are transformed into
multiresolution representations (m
A
, m
B
). The trans-
form is symbolized by Ψ. At the combination stage
(C ) the transformed data are fused. In the context of
wavelets, it was proposed to apply the maximum se-
lection rule (Li et al., 1995) for the detail coefficients
as fusion rule. For instance, in the case of two input
images, we select from each duo of geometrically cor-
responding detail coefficients the one that is largest in
absolute value. From the composite multiresolution
representation m
F
thus obtained, the fused image i
F
is derived by application of the backtransform Ψ
−1
.
151
M. de Zeeuw P., J. E. M. Pauwels E. and Han J..
MULTIMODALITY AND MULTIRESOLUTION IMAGE FUSION.
DOI: 10.5220/0003866501510157
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 151-157
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

i
A
-
Ψ
-
c
A
@
@
@R
i
B
-
Ψ
-
c
B
C
-
c
F
-
Ψ
−1
-
i
F
Figure 1: Simple MR image fusion scheme. Left: MR transform Ψ of the input sources i
A
and i
B
. Middle: combination in
the transform domain. Right: inverse MR transform Ψ
−1
producing the composite image i
F
.
A framework for more sophisticated fusion rules
has been proposed by Burt et al. (Burt and Kolczyn-
ski, 1993), for an overview of rules see (Piella, 2003b;
Piella, 2003a).
2.1 Choice of Multiresolution
For the multiresolution part of the fusion algorithm
many schemes are available to us, ranging from pyra-
mid schemes as Laplacian Pyramids (Burt and Adel-
son, 1983), Steerable Pyramids (Simoncelli and Free-
man, 1995), Gradient Pyramids (Burt and Kolczyn-
ski, 1993), an abundance of wavelets (Mallat, 1989)
and even a multigrid method solving diffusion equa-
tions on a range of grids (De Zeeuw, 2005; De Zeeuw,
2007). So far, our method of choice is the Gradi-
ent Pyramid (GP). Based on anecdotal evidence, it
appears less prone to artifacts like ringing effects.
The latter are often perceived when image regions of
high contrast are fused with the use of (standard, real-
valued) wavelets (Forster et al., 2004). A theoretical
disadvantage of the GP scheme is that it cannot boast
of perfect reconstruction. However, this appears not
to pose a problem in practice for many applications.
Gradient Pyramid. The gradient pyramid (Burt
and Kolczynski, 1993) is derived from a Gaussian
pyramid using a specific kernel. The Gaussian pyra-
mid involves the application of a generating kernel
followed by downsampling. The process is repeated,
producing Gaussians at a sequence of levels. At each
level per pixel (discrete) gradients are computed in 4
separate directions: horizontal, vertical and 2 diago-
nal. At each gradient pyramid level, the gradients are
applied again, leading to a pyramid of second deriva-
tives. These four second derivatives (computed per
level, per pixel) play a role similar to the one of detail
coefficients in discrete wavelet methods. Such detail
coefficients are also referred to as bands. With the last
computed Gaussian as coarsest approximation of the
original image and the above detail coefficients the
original image can be reconstructed accurately, albeit
not perfectly. An annotated MATLAB
R
implementa-
tion of the scheme is available as part of the toolbox
Matifus
1
, see (De Zeeuw et al., 2004).
3 FUSION OF MULTIMODAL
IMAGES
Introduction. As an example of fusion of multi-
modal images we consider two input images where
one resides in the visible spectrum and the other one
in the (far) infrared. This is typically a situation where
opposite contrast may occur. If one considers stan-
dard fusion schemes, it appears that input images al-
ways receive equal treatment: one may interchange
the input images, the output of fusion remains the
same. Here, we abandon this principle. Instead, we
select a so-called iconic image from our set of input
images. The other images are called companion im-
ages. The goal of fusion becomes that the information
held in the iconic image is to be enhanced by the com-
panion input images but without reversing the con-
trast. In the said example, we choose the image in the
visible spectrum as the iconic image. Figure 2 pro-
vides an illustration, albeit an artificial one. It shows
an actual result of our new scheme described below
(Section 3.1). The iconic image contains two objects
with strong contrasts to the background and two ob-
jects with faint contrasts. The other input image (top
right) contains four objects all with strong contrasts.
The image produced by the standard fusion scheme
(middle left) shows two undesirable consequences.
Firstly, the contrast of one of two of the faint objects
is not just enhanced but also, unfortunately, reversed.
Secondly, the bright object in the iconic image is sub-
1
http://homepages.cwi.nl/˜pauldz/Bulk/Codes/MATIFU
S/
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
152
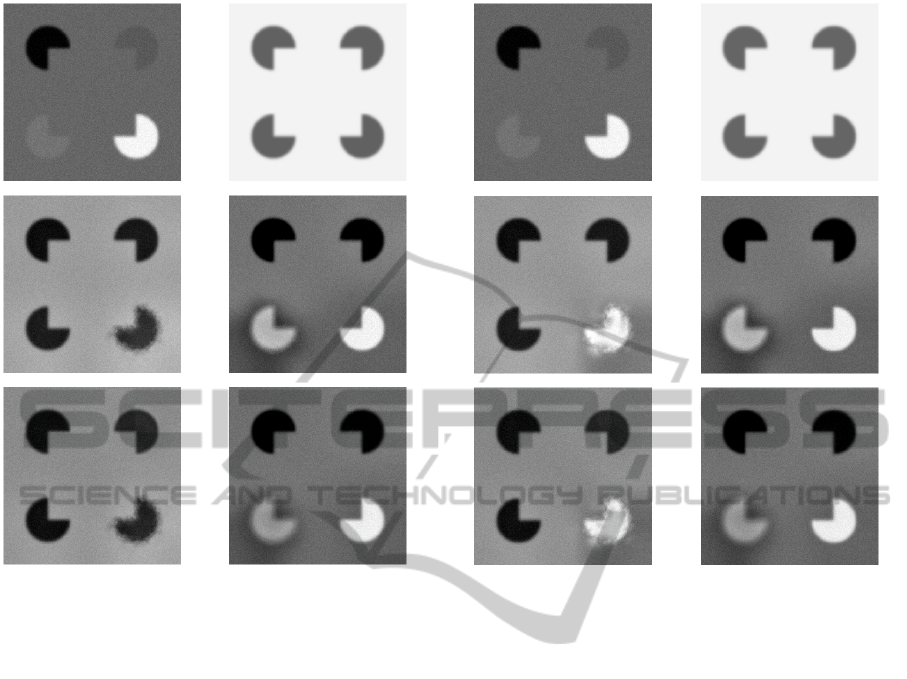
Figure 2: An artificial example. Top left: visual image,
iconic. Top right: far infrared image. Middle left: fused
image, standard fusion rule (selection). Middle right: fused
image, iconic fusion rule (selection). Bottom left: Burt &
Kolczynski fusion rule. Bottom right: iconic fusion rule
(smooth).
stituted by a blurry and dark object. Moreover, the
latter object is unstable in the sense that its intensity
can change dramatically if the companion input image
is changed slightly, this is demonstrated by Figure 3.
The wavering is caused by the selection mechanism
for the detail coefficients and the averaging out of ap-
proximation coefficients at the coarsest grid in case
of opposite contrast. Below we give an outline of the
new fusion scheme, followed by explicit fusion rules
(old and new ones).
Framework. Figure 4 (cp. (Piella, 2003a, Figure
6.7) & (Burt and Kolczynski, 1993, Figure 2)) shows
the general framework with the building blocks of im-
portance, i.e. the computations of match measure, ac-
tivity measure (saliency), the fusion decision and the
combination (weights).
We adopt a notation similar to the one that has
been used in Piella’s thesis (Piella, 2003a, Chapter 6).
Saliency. Contrast in (local) image regions is
sensed by the detail coefficients of the multiresolu-
tion scheme: the larger the coefficients at a pixel, the
Figure 3: Artificial example revisited, slightly altered in-
put images. Top left: visual image, iconic. Top right: far
infrared image. Middle left: fused image, standard fusion
rule (selection). Middle right: fused image, iconic fusion
rule (selection). Bottom left: Burt & Kolczynski fusion
rule. Bottom right: iconic fusion rule (smooth).
higher the contrast can be expected to be. The max-
imum selection rule (Li et al., 1995), already men-
tioned, in the combination stage (C ) is based on this
assumption but wants refinement. Instead of a sep-
arate treatment for each band (per level, per pixel),
we opt for a collective treatment of the detail coeffi-
cients based on the saliency at a pixel. We choose to
measure this collective saliency a
k
(.) as the Euclidean
norm of the detail coefficients over all bands (per level
k, the dot denotes the location of the coefficients per
pixel).
Match Measure. Burt et al. (Burt and Kolczynski,
1993) introduced the use of a (local) match measure
to determine whether to use selection or averaging at
the combination of detail coefficients. In the next sec-
tion we propose a much heavier role, depending on
the value (including sign) we will use it to adjust the
contrast of input images to a favorite spectrum. A
possible measure of choice is local normalized cross-
correlation of vectors over small (e.g. square) regions
of coefficients per band, per level k, per pixel. This
particular choice would involve substraction of aver-
MULTIMODALITY AND MULTIRESOLUTION IMAGE FUSION
153

i
A
i
B
Ψ
c
A
Ψ
c
B
//
Match
m
AB
oo
//
Saliency
s
A
Saliency
s
B
oo
//
Fusion Decision
d
oo
//
Combination
c
F
oo
Ψ
−1
i
F
Figure 4: Generic MR image fusion scheme involving
matching and saliency measuring. Two input sources i
A
and
i
B
are turned into one output composite image i
F
.
ages of detail coefficients which already themselves
correspond to modes of zero average. Therefore we
simplify to the computation of the inner products of
normalized vectors of coefficients. The latter can also
be expressed in terms of angles between the vectors.
Whatever the choice at hand, we assume that a value
of 1 stands for identity, 0 for orthogonality and −1 for
identity but with opposite sign. It measures similarity,
independent of amplitudes,. A possible refinement
would be to consider small geometrical variations of
the local region in one image with respect to the coun-
terpart image and compute the maximum similarity
over the variations. This might be useful in the case
of small registration errors. The local match measure
can be implemented efficiently and without chang-
ing the order of complexity of the fusion method as
a whole.
Outline. After the multiresolution decomposition
of the input images, the fusion proceeds as follows.
One computes the local match measure between the
iconic and the other image(s) (recall that for Gradient
Pyramids the number of bands equals four, for stan-
dard 2D wavelets it equals three). Where the match
measure is positive or close to zero (i.e. no match)
there is no reason to deviate from the standard fusion
rules. Where the match measure is distinctly nega-
tive, this is indicative of locally similar structures but
with opposite contrast and we enforce that the sign
of the coefficient of the composite (fused) image con-
curs with that of the corresponding coefficient of the
iconic image. The above is materialised in the next
section.
3.1 Iconic Fusion Rules
We start by defining a simple decision map for a rather
simple fusion rule
δ
k
I
(.) =
a
k
I
(.)
a
k
I
(.) + a
k
A
(.)
(1a)
δ
k
A
(.) =
a
k
A
(.)
a
k
I
(.) + a
k
A
(.)
, (1b)
where a
k
I
(.) and a
k
A
(.) are activity measures (saliency)
referring to images I and A respectively. Obviously
δ
k
I
(.) + δ
k
A
(.) = 1 and both δ
k
I
(.), δ
k
A
(.) ≥ 0. A stan-
dard choice for the composite coefficient would be the
weighted combination
c
k
F
(.|p) = ω
k
I
(.)c
k
I
(.|p) + ω
k
A
(.)c
k
A
(.|p) (2)
where p denotes the specific band and the weights are
chosen as
ω
k
I
(.) = δ
k
I
(.) and ω
k
A
(.) = δ
k
A
(.).
In case of standard wavelets the number of bands is
3 (horizontal, vertical, diagonal coefficients), in case
of Gradient Pyramids the number of bands is 4 (see
Section 2.1). We refer to the above rule as the smooth
standard fusion rule. Alternatively, a selection (i.e.
thresholded) variant of the above rule would be de-
fined by
ω
k
I
(.) =
1 δ
k
I
(.) ≥ δ
k
A
(.)
0 otherwise
(3a)
ω
k
A
(.) = 1 − ω
k
I
(.). (3b)
One notes the symmetry of the roles of images I and
A. However, as we want to prevent the local con-
trasts of the iconic image from reversing, we are go-
ing to propose a biased scheme. In the paragraph on
saliency we already mentioned the relationship be-
tween contrast in an image and the detail coefficients
of a multiresolution method: the larger the contrast
the larger the detail coefficients. But the relationship
goes further: with respect to contrast one can reverse
the transition from light to dark, by reversing the sign
of the detail coefficients. The new scheme is based on
this observation. Firstly, we compute the local match
measure m
k
IA
(.|p) discussed earlier (I is the iconic im-
age, A the additional input image). That is, per level,
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
154
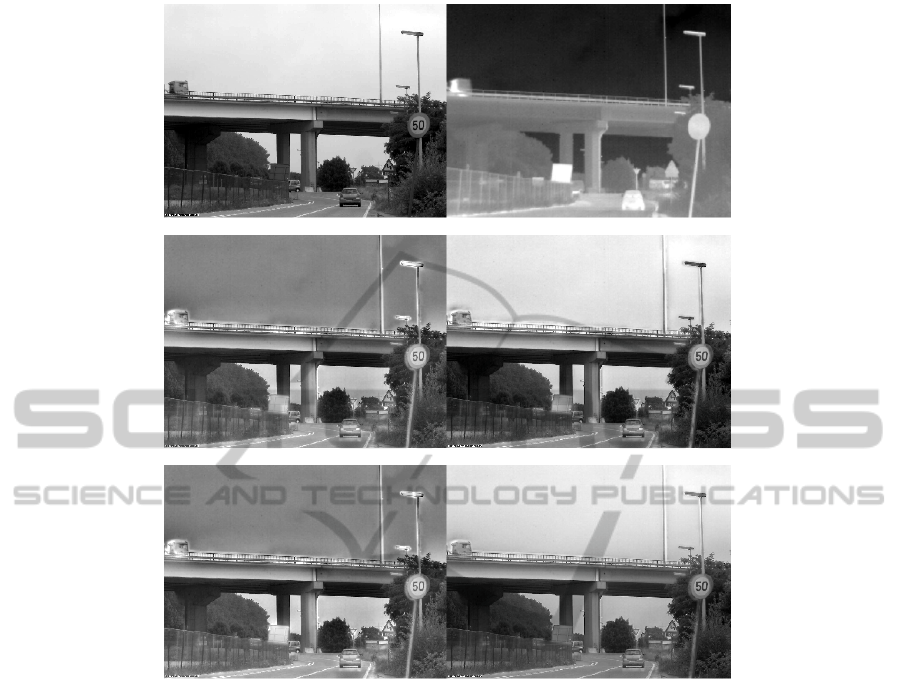
Figure 5: Top left: visual image, iconic. Top right: far infrared image. Middle left: fused image, standard fusion rule
(selection). Middle right: fused image, iconic fusion rule (selection). Bottom left: Burt & Kolczynski fusion rule. Bottom
right: iconic fusion rule (smooth). Top (input) images by courtesy of Xenics.
per band and per location we determine the similar-
ity of the detail coefficients of the input images in a
small region surrounding the location. We put several
requirements to the scheme to be, based on desired
outcomes for local circumstances. For convenience
we introduce
σ
k
I
(.|p) = Sign(c
k
I
(.|p)) and σ
k
A
(.|p) = Sign(c
k
A
(.|p))
(where Sign is the well-known sign function with val-
ues +1 for a positive argument, −1 for a negative ar-
gument and 0 for a zero argument). If signs are op-
posite, we demand that ω
k
A
(.|p) = −δ
k
A
(.), provided
that the absolute local match measure |m
k
IA
(.|p)| ≈ 1.
If the local match measure happens to be around 0
(orthogonality) we want to resort to the above stan-
dard scheme. Likewise, when signs are not opposite
we also want to resort to the standard scheme. These
requirements lead to the following scheme
ω
k
I
(.|p) = δ
k
I
(.),
ω
k
A
(.|p) = δ
k
A
(.)( 1 − |m
k
IA
(.|p)|
(1 − σ
k
I
(.|p)σ
k
A
(.|p)) ).
(4)
Inserting (4) into (2) yields
c
k
F
(.|p) = δ
k
I
(.)c
k
I
(.|p) + δ
k
A
(.)(
(1 − |m
k
IA
(.|p))c
k
A
(.|p)+
|m
k
IA
(.|p)|σ
k
I
(.|p)|c
k
A
(.|p)|).
(5)
We refer to the above rule as the smooth iconic fu-
sion rule. Alternatively, a selection (i.e. thresholded)
variant of rule (4) leads to the following composite
coefficient:
c
k
F
(.|p) =
c
k
I
(.|p) δ
k
I
(.) ≥ δ
k
A
(.)
c
k
A
(.|p) δ
k
I
(.) < δ
k
A
(.) &
m
k
IA
(.|p)
< T
σ
k
I
(.|p)|c
k
A
(.|p)| otherwise
(6)
MULTIMODALITY AND MULTIRESOLUTION IMAGE FUSION
155

for a threshold T , e.g. T =
1
2
. In the case of three or
more input images, one again just selects one image
as the iconic one and the generalisation is straightfor-
ward.
4 MORE RESULTS
Figure 5 shows results for a real-life surveillance ex-
ample (in particular do watch the poles).
The result at the middle left is based on the stan-
dard fusion rule (selection), the result at the middle
right is based on the iconic fusion rule (6) (selection).
In this section, for comparison, we point to additional
results for the smooth variant of the said iconic fusion
(bottom right) and for the rule of Burt & Kolczynski
(bottom left). The latter rule implies that where simi-
larity is low ( m
k
IA
(.|p) < T ) the maximum selection
rule is applied, where similarity is high ( m
k
IA
(.|p) ≥ T
) the rule is presented by ω
k
I
(.) =
1
2
−
1
2
(1 − m
k
IA
(.|p))
(1 − T )
and ω
k
A
(.) = 1−ω
k
I
(.) which comes close to averaging
mode. An important difference with the iconic fusion
rule is that the outcome is symmetric with respect to
interchanging the input images. Contrary to the new
iconic fusion rule which tries, roughly speaking, to
convert the infrared contrasts into visual light con-
trasts and interchanging the input images then would
imply converting visual light contrasts into infrared
contrasts.
4.1 Fusion Metrics
Due to lack of a ground-truth, especially in the con-
text of multimodality, quantitative assessment of fu-
sion is quite a challenge, and still appears an open
problem. Many different metrics have already been
proposed, but they rate algorithms differently (Liu
et al., 2012). A rather general metric as the mutual in-
formation fusion metric persistently favors fusion by
simply averaging input images (Cvejic et al., 2006),
and looks not very suited for our new method. The
choice for a metric is driven by the requirements of
the application (Liu et al., 2012). In future research
we plan to apply the 12 metrics used by the latter, and
possibly devise an additional one of our own making,
to make an objective assessment of our new method.
5 CONCLUDING REMARKS
Within the context of multiresolution schemes a new
fusion rule has been proposed, coined iconic fusion
rule, so as to deal with opposite contrast which might
occur in a set of multimodal images. The rule is a
biased one, with the bias towards the contrasts ob-
served (if any) in an image with a favoured spectrum,
the so-called iconic image. Qualitative evidence for
the soundness of the rule has been given by means
of a few examples. A survey with quantitative assess-
ment of several testproblems and applying a variety of
quality measures is part of future research. Given the
intent of the new method, quite likely a new quality
measure needs to be devised so as to deal with images
with opposite contrast.
ACKNOWLEDGEMENTS
The research leading to these results has received
funding from the European Community’s Seventh
Framework Programme (FP7-ENV-2009-1) under
grant agreement no FP7-ENV-244088 ”FIRESENSE
- Fire Detection and Management through a Multi-
Sensor Network for the Protection of Cultural Her-
itage Areas from the Risk of Fire and Extreme
Weather”. We gratefully used images that have been
provided to us by Xenics (Leuven, Belgium).
REFERENCES
Burt, P. and Adelson, E. (1983). The laplacian pyramid as a
compact image code. IEEE Transactions on Commu-
nications, 31(4):532–540.
Burt, P. J. and Kolczynski, R. J. (1993). Enhanced image
capture through fusion. In Proceedings Fourth Inter-
national Conference on Computer Vision, pages 173–
182, Los Alamitos, California. IEEE Computer Soci-
ety Press.
Cvejic, N., Canagarajah, C. N., and Bull, D. R. (2006). Im-
age fusion metric based on mutual information and
tsallis entropy. Electronic Letters, 42(11):626–627.
De Zeeuw, P. M. (2005). A multigrid approach to image
processing. In Kimmel, R., Sochen, N., and We-
ickert, J., editors, Scale Space and PDE Methods in
Computer Vision, volume 3459 of Lecture Notes in
Computer Science, pages 396–407. Springer-Verlag,
Berlin Heidelberg.
De Zeeuw, P. M. (2007). The multigrid image transform. In
Tai, X.-C., Lie, K. A., Chan, T. F., and Osher, S., ed-
itors, Image Processing Based on Partial Differential
Equations, Mathematics and Visualization, pages 309
– 324. Springer Berlin Heidelberg.
De Zeeuw, P. M., Piella, G., and Heijmans, H. J. A. M.
(2004). A matlab toolbox for image fusion (matifus).
CWI Report PNA-E0424, Centrum Wiskunde & In-
formatica, Amsterdam.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
156

Forster, B., van de Ville, D., Berent, J., Sage, D., and Unser,
M. (2004). Complex wavelets for extended depth-of-
field: A new method for the fusion of multichannel
microscopy images,. Microscopy Research and Tech-
nique, 65:33–42.
Han, J., Pauwels, E., and de Zeeuw, P. (2011). Visible and
infrared image registration employing line-based ge-
ometric analysis. MUSCLE International Workshop
on Computational Intelligence for Multimedia Under-
standing, Pisa (Italy), Accepted for publication.
Li, H., Manjunath, B. S., and Mitra, S. K. (1995). Multisen-
sor image fusion using the wavelet transform. Graph-
ical Models and Image Processing, 57(3):235–245.
Liu, Z., Blasch, E., Xue, Z., Zhao, J., Lagani
`
ere, R., and
Wu, W. (2012). Objective assessment of multiresolu-
tion image fusion algorithms for context enhancement
in night vision: a comparative study. IEEE Trans. on
Pattern Analysis and Machine Intelligence, 34(1):94–
109.
Mallat, S. (1989). A theory for multiresolution signal de-
composition: the wavelet representation. IEEE Pat-
tern Analysis and Machine Intelligence, 11(7):674–
693.
Piella, G. (2003a). Adaptive Wavelets and their Applica-
tions to Image Fusion and Compression. PhD thesis,
CWI & University of Amsterdam.
Piella, G. (2003b). A general framework for multiresolution
image fusion: from pixels to regions. Information Fu-
sion, 9:259–280.
Simoncelli, E. and Freeman, W. (1995). The steerable pyra-
mid: a flexible architecture for multi-scale derivative
computation. In Proceedings of the IEEE Interna-
tional Conference on Image Processing, pages 444—
447. IEEE Signal Processing Society.
Zitov
´
a, B. and Flusser, J. (2003). Image registration meth-
ods: a survey. Image and Vision Computing, 21:977–
1000.
MULTIMODALITY AND MULTIRESOLUTION IMAGE FUSION
157
