
FRAME INTERPOLATION WITH OCCLUSION DETECTION
USING A TIME COHERENT SEGMENTATION
Rida Sadek
1
, Coloma Ballester
1
, Luis Garrido
2
, Enric Meinhardt
1
and Vicent Caselles
1
1
Department of Technology, Pompeu-Fabra University, Roc Boronat, Barcelona, Spain
2
Department of Applied Mathematics and Analysis, Barcelona University, Barcelona, Spain
Keywords:
Frame Interpolation, Optical Flow, Occlusion.
Abstract:
In this paper we propose an interpolation method to produce a sequence of plausible intermediate frames
between two input images. The main feature of the proposed method is the handling of occlusions using
a time coherent video segmentation into spatio-temporal regions. Occlusions and disocclusions are defined
as points in a frame where a region ends or starts, respectively. Out of these points, forward and backward
motion fields are used to interpolate the intermediate frames. After motion-based interpolation, there may still
be some holes which are filled using a hole filling algorithm. We illustrate the proposed method with some
experiments.
1 INTRODUCTION
Our purpose in this paper is to propose an interpola-
tion method to produce a sequence of plausible inter-
mediate frames between two input images with ap-
plications to slow camera motion for smooth play-
back of lower frame rate video, smooth view interpo-
lation and animation of still images. Recent progress
in optical flow estimation provides optical flows of
sufficient quality for intermediate frame interpolation
(Brox et al., 2004; Brox and Malik, 2010; Sun et al.,
2010). One of the main difficulties that has to be
tackled in image interpolation is the occlusion ef-
fects. Points visible at time t that occlude at time
t + 1 should not have a corresponding point at frame
t + 1. While points that appear at time t + 1 should
have no correspondent at time t. Image interpolation
algorithms have to detect such occlusions in order to
correctly decide how to interpolate.
Most current optical flow estimation methods do
not directly compute occlusions and assign an opti-
cal flow to each pixel of each frame. If we blindly
use the optical flow, artifacts are generated. They
are specially visible at moving occlusion boundaries.
This difficulty is usually handled by analyzing the for-
ward and backwards motion fields in order to decide
from which image we interpolate. In this paper we
propose to address the occlusion effects by using a
spatio-temporal segmentation of the video sequence.
This segmentation allows us to interpret the sequence
as a set of spatio-temporal regions whose temporal
boundaries give us information about their birth and
death. As a result, we are able to extract a set of candi-
date occluding and disoccluding points. Forward and
backward motion fields are then used to interpolate
the intermediate image taking into account the latter
points. After motion-based interpolation, there may
still be some holes which are filled using a suitable
hole filling algorithm (Criminisi et al., 2004; Arias
et al., 2011).
1.1 Previous Work
There are many papers devoted to intermediate frame
interpolation. Many of them are based on establish-
ing correspondencesbetween consecutivepairs of im-
ages. They are usually computed by means of block
based motion estimation or dense optical flow. The
former has been applied to frame-rate conversion for
digital television. The image is divided into a set of
non-overlappingblocks and forward and/or backward
motion compensation is performed to create the inter-
polated frame (Cafforio et al., 1990). Occlusion ef-
fects are handled by analyzing the forward and back-
wards motion fields in order to decide from which
frame to interpolate. In (Dane and Nguyen, 2004) the
authors conclude that the averaging technique is ap-
propriate if forward and backward prediction errors
are equal. In other cases, they conclude with theoreti-
cal results that the filter taps associated to the motion
367
Sadek R., Ballester C., Garrido L., Meinhardt E. and Caselles V..
FRAME INTERPOLATION WITH OCCLUSION DETECTION USING A TIME COHERENT SEGMENTATION.
DOI: 10.5220/0003830803670372
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 367-372
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

compensation have to be adapted to the reliability of
the motion vectors.
Frame interpolation also has been tackled by
means of dense optical flow. Most of current opti-
cal flow approaches compute the forward field based
on the work of Horn and Schunk (see (Baker et al.,
2011)). Other authors compute a symmetric optical
flow by means of a penalty in their model (Alvarez
et al., 2007; Ince and Konrad, 2008) which permits to
define occlusion regions.
In the context of frame interpolation, (Baker et al.,
2011) propose a simple method for frame interpola-
tion and occlusion handling based on forward splat-
ting which only uses the forward flow. In (Herbst
et al., 2009) the authors enhance the latter approach
by means of forward and backward splatting. Occlu-
sion is detected by assessing the flow consistency of
the forward and backward flows at the intermediate
frame. Holes are treated by extending, at the interme-
diate frame, the motion vectors of neighboring pixels
using a Markov Random Field (MRF). (Linz et al.,
2010) present a long-range correspondence estima-
tion technique that includes SIFT, edge and symme-
try data terms. Occlusion also is detected by assess-
ing the coherence between the two flows. The inter-
polated image is created by using a graph-cut based
approach that decides at each pixel from which image
the color information is taken.
In (Mahajan et al., 2009) the authors present a
method based on graph cuts which is based on the
idea that a given pixel traces out a path in the source
images. Their method can we viewed as an inverse
optical flow algorithm: they compute where in the
input images a given intermediate pixel comes from.
Occlusion effects are again tackled by assessing the
consistency between the forward and backward flows.
The advantage of their method is that no holes are cre-
ated and thus they need no treatment for them.
1.2 Overview of our Algorithm
We briefly summarize the main Steps of our algo-
rithm. Let I(x, y,t) be a video sequence. For sim-
plicity we consider that the video is sampled at times
t = 0,1,2,. ... The image domain Ω is a rectangular
grid in Z
2
.
Step 1: We compute the forward (u,v) and backward
(u
b
,v
b
) optical flows. For that we use the algo-
rithm (Brox and Malik, 2010), see section 2.1. As
an alternative, we can also use (Sun et al., 2010).
Both estimate a forward flow between images t
and t + 1 and have no occlusion treatment. The
binary file and the code, respectively, of both al-
gorithms is publicly available.
Step 2: Using the forward flow we compute a time
consistent segmentation of the video sequence
(see section 2.2).
Step 3: Potential occlusions are then derived from
Step 2. We then interpolate the intermediate
frames using the idea of forward and backward
splatting described in (Herbst et al., 2009), see
section 2.3. The result may contain holes made
of points which could not be interpolated.
Step 4: The holes are filled-in using an inpainting
strategy, see section 2.4.
2 ALGORITHM DESCRIPTION
2.1 Optical Flow Computation
For the computation of the optical flow we can use
any optical flow producing good results. Our experi-
ments have been done with the optical flow algorithm
proposed in (Brox and Malik, 2010) which uses HOG
(Histogram of Oriented Gradients) descriptors in or-
der to be able to follow fast motions. Estimated mo-
tion vectors are required to follow descriptor match-
ings. As an alternative, we can also use (Sun et al.,
2010).
2.2 Time Coherent Video Segmentation
As stated previously, the objective is to create a
time consistent segmentation of the video sequence.
We consider the video sequence as a volume of 3D
data. Our segmentation is based on the simplified
Mumford-Shah model. Given the video sequence
I(x, y,t), the simplified Mumford-Shahmodel approx-
imates I by a piecewise constant function
˜
I(x, y,t) =
∑
O∈P
m
O
χ
O
(x,y,t) that minimizes the energy
N
∑
t=0
∑
x∈Ω
(I(x, y,t) −
˜
I(x, y,t))
2
+ λ
∑
O
Area(∂O), (1)
where λ > 0, P is a partition of Ω × {0,... ,N}
into connected regions O, and Area corresponds to
the area of the interface that separates two spatio-
temporal regions. Note that the area for each inter-
face is counted twice in (1), but this amounts only to
a replacement of the value of the parameter λ by λ/2.
As explained in (Koepfler et al., 1994), the parameter
λ controls the number of regions of the segmentation.
For a given partition P , the constant m
O
is the average
of I(x,y,t) in the region O.
We replace the classical notion of connectivity
by a time compensated one. For that we construct
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
368
a graph whose nodes are the pixels of the video,
i.e. {(x,y,t) : (x,y) ∈ Ω,t ∈ {0,. .. ,N}}. There are
two types of edges in the graph: spatial and tem-
poral ones. Spatial edges connect a pixel (x,y,t)
to its 8-neighborhood in frame t. Temporal edges
are defined using the pre-computed forward optical
flow. If the flow vector for pixel (x,y,t) is (u, v),
then we add to the graph an edge joining pixel (x,y,t)
to pixel (x
′
,y
′
,t
′
) = (x + [u], y+ [v],t + 1), where the
square brackets denote the nearest integer. This graph
gives us the 3D neighborhood of each point (x,y,t).
This permits an easy adaptation of the algorithm in
(Koepfler et al., 1994)
For a givenλ and following(Koepfler et al., 1994),
the energy is optimized with a regionmergingstrategy
that computes a 2-normal segmentation. A 2-normal
segmentation is defined by the property that merging
any pair of its regions increases the energy of the seg-
mentation. Notice that 2-normal segmentations are
typically not local minima of the functional; however,
they are fast to compute and useful enough for our
purposes. The region merging strategy consists in it-
eratively coarsening a given pre-segmentation, which
is stored as a region-adjacency graph. Each edge of
this graph is marked by the energy gain that would
be obtained by merging the corresponding pair of re-
gions into one. Then, at each step of the algorithm
the optimal merge – the one that leads to the best im-
provementof the energy – is performed, thus reducing
the region adjacency graph by one region and one or
more edges. The energy gain is recomputed for the
neighbouring regions and the algorithm continues to
merge as long as they produce some improvement of
the energy functional. Note that the parameter λ of
the energy functional controls the number of regions
of the resulting segmentation. When finding 2-normal
segmentations by region merging, this parameter can
be automatically set by specifying directly the desired
number of regions.
In practice, we do not know which value of λ
will produce a good segmentation. For that reason
we proceed as follows: we create a set of partitions
that are obtained by successively increasing λ (e.g.
dyadically). Each partition is computed by taking as
input the previously obtained partition and merging
regions as described in the previous paragraph. The
algorithm starts with a low value of λ using the time-
connected graph described above, and stops when the
trivial partition is obtained. The history of all the
mergings is stored in a (binary) tree, whose nodes rep-
resent each region of the segmentation at some itera-
tion. The leafs of this tree are the pixels of the input
video. The internal nodes of this tree are regions ap-
pearing at some iteration, and the root of the tree is
the whole video. While the tree is being built, each
node is marked with the value of λ at which the cor-
responding region has been created.
1
3
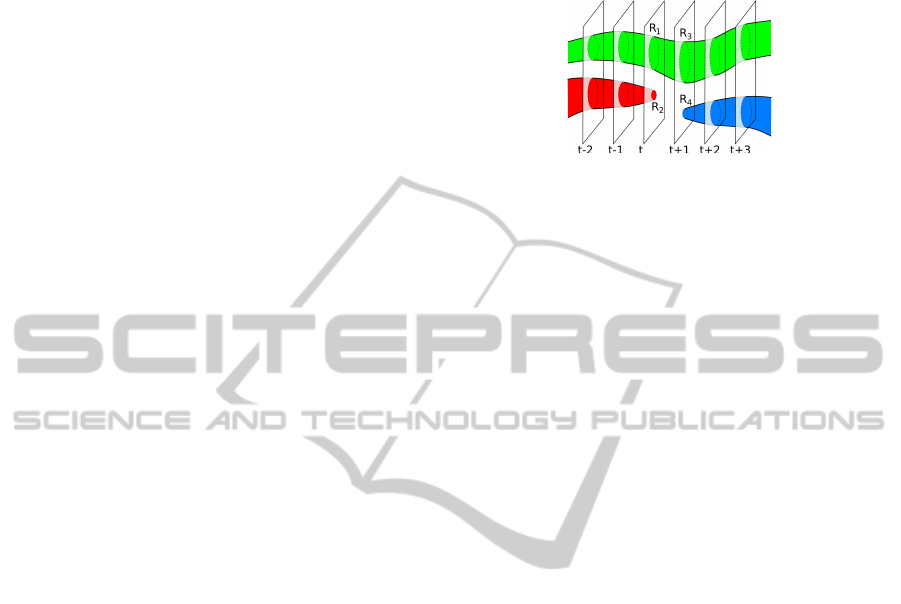
Figure 1: This figure illustrates the concept of tubes as de-
scribed in the paper. We see a tube that ends at t, a tube that
starts at t + 1 and a tube that continues through frame t.
Once this tree is built, it can be cut at any desired
value of λ in real-time, to produce segmentations at
different scales. We call tubes the spatio-temporal re-
gions of the resulting partition (see Figure 1). The
tubes encode a temporally coherent segmentation of
the objects in the video, which can be used for sev-
eral purposes (e.g. tracking). We use them here in
order to determine potential occlusions by analyzing
their temporal boundaries. Any connected tube O has
a starting and and ending times, denoted by T
s
O
and
T
e
O
, respectively. The section of O at time t is de-
noted by O(t) = {(x, y) ∈ Ω : (x,y,t) ∈ O}. Thus O
starts (resp. ends) with the spatial region O(T
s
O
) (resp.
O(T
e
O
)).
2.3 Intermediate Frame Interpolation
Given two video frames I
0
and I
1
at times t = 0 and
t = 1 respectively, our purpose is to interpolate an in-
termediate frame at time t = δ ∈ (0, 1). For that issue
the forward and backward motion fields are first esti-
mated. In order to tackle with the occlusion effects
we use the information of the temporal boundaries
obtained with our time coherent segmentation algo-
rithm. Intuitively, a given pixel (x,y,t) at t = 0 is for-
ward projected if it is not in a dying statio-temporal
region. Similarly, a given pixel (x, y,t) at t = 1 is
backward projected if it is not in a spatio-temporal
region that has birth there. Let us now go into the
details of the algorithm.
The frame interpolation algorithm starts by mark-
ing all pixels to be interpolated as holes. Then two
stages are performed: in the first stage a forward pro-
jection is done; in the second a backward projection
is performed to (partially) fill in the holes that the first
stage may have left.
For the first stage we use the forward optical flow
(u,v) from t = 0 to t = 1. Let F (t = 0) be the set
of pixels of frame t = 0 which do not belong to tubes
that end at time t = 0. This information is contained
FRAME INTERPOLATION WITH OCCLUSION DETECTION USING A TIME COHERENT SEGMENTATION
369
in the data structure that we developed for the spatio-
temporal segmentation.
Let us describe the forward projection step. It is
based on the idea of splatting described in (Herbst
et al., 2009).
For a given pixel (x,y,t = 0), let p
δ
= (x,y) +
δ(u,v) be the forward projected point of the pixel.
Note that p
δ
may be a non-integer point. Let p
00
δ
=
⌊p
δ
⌋ be the pixel whose coordinates are given by
the integer parts of the coordinates of p
δ
, and let
p
ab
δ
= p
00
δ
+ (a,b) for (a,b) = (0,1), (1,0),(1, 1), the
four points bounding the square containing p
δ
. We
assign the flow (u,v) to each pixel p
ab
δ
and compute
its forward and backward projections: let them be
p
ab
0
= p
ab
δ
− δ(u,v) and p
ab
1
= p
ab
δ
+ (1− δ)(u,v). The
values I
0
(p
ab
0
) and I
1
(p
ab
1
) are computed using bilin-
ear interpolation.
The pixel (x,y,t = 0) is forward interpolated if
pixel (x,y,t) belongs to F (t = 0) or if
|I
0
(p
ab
0
) − I
1
(p
ab
1
)| ≤ τ, (2)
where τ > 0 is a pre-specified tolerance value (in our
experiments, we take the value τ = 10). If the previ-
ous conditions are not hold, then we do not forward
interpolate.
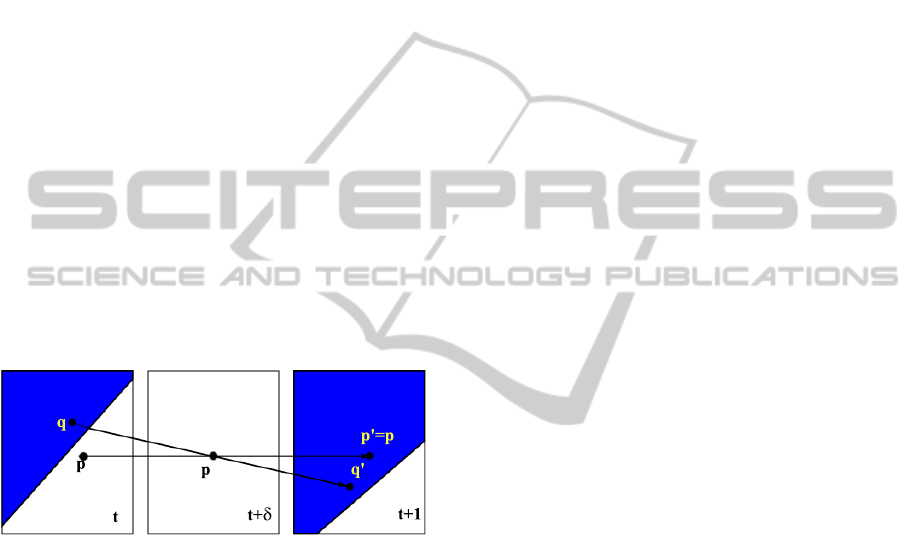
Figure 2: A case of inconsistent interpolation as explained
in the text.
Equation (2) allows to deal with pixels which are
part of objects that are visible in both frames I
0
,I
1
(and thus belong to a continuing tube) but are oc-
cluded in frame I
1
, inheriting the optical flow of the
visible object as an effect of the regularization terms
(see the pixel p in Figure 2). In that case, the corre-
spondents of both points (p,t) and (q,t) in Figure 2
go through (p,t + δ) and we expect that the candidate
interpolation from I(p,t) and I(p
′
,t + 1) is discarded
because inconsistent gray level values, while the in-
terpolation between I(q,t) and I(q
′
,t + 1) is retained
because it satisfies (2).
In case the pixel (x,y,t = 0) can be forward inter-
polated the pixels at p
ab
δ
are computed as
˜
I
δ
(p
ab
δ
) = (1− δ)I
0
(p
ab
0
) + δI
1
(P
ab
1
) (3)
and marked as interpolated.
The previous process is repeated for all pixels. We
scan all pixels at t = 0 from left to right and top to bot-
tom. For each pixel we proceed as described above.
In case multiple interpolated values are assigned to a
intermediate pixel, we assign to it the average of all
values
˜
I
δ
(p
ab
δ
) for p
ab
δ
= ( ¯x, ¯y).
Once the first stage has been performed, the al-
gorithm now uses the backward flow to deal with the
holes the first step may have left. Note that all pixels
labeled as interpolated (in the first stage) are not al-
tered. The algorithm is basically the same as the one
described before but in this case a backward projec-
tion is done, replacing F (t = 0) by F (t = 1). Here
F (t = 1) is defined as the set of tubes that do not be-
gin at time t = 1. This can be easily checked on the
graph (which has been constructed using the forward
flow).
2.4 Filling the Holes
Holes appear inevitably due to occlusions, disocclu-
sions, or during the interpolation process due to the
expansive or contractive character of the flow. Some
occlusions may generate ending tubes at timet (which
should not be images of the backward flow). Thus,
we do not project those pixels forward for interpola-
tion. Disocclusions are not images (and some of them
may be starting tubes) of the forward flow and may
also generate holes. To fill-in the remaining holes we
use an inpainting strategy. Each pixel in a hole of I
δ
is filled in by an exemplar based interpolation as in
(Arias et al., 2011) (see also (Criminisi et al., 2004)).
To fill a pixel in frame t we search for patches in the
previous and next frames. To reduce the searching
area we search in regions of frame t (resp. t + 1)
determined by the optical flows of pixels bounding
the hole. The search of best patches can be acceler-
ated using the Patch-Match algorithm (Barnes et al.,
2009).
3 EXPERIMENTS
Let us display some experiments. Figure 3
shows the interpolation between two different
frames of the sequence MiniCooper, available at
http://vision.middlebury.edu/flow/data/. The person
is closing the door at the back of the car. The max-
imum displacement is 17.28. From left to right and
top to bottom, the first and last images belong to the
original sequence. The four intermediate frames have
been interpolated. In Figure 4 we show the holes gen-
erated by the interpolation process. The left image
shows the holes after forward interpolation, the right
image shows the remaining ones after backward in-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
370

terpolation. Those are the ones that are filled-in by
inpainting. In Middlebury an intermediate frame is
given for comparison. It corresponds to the fourth im-
age in Figure 3. The RMSE is in this case 4.2440.
Figure 5 shows the interpolation between two dif-
ferent frames of the sequence Foreman. The person is
opening the mouth and some regions are disoccluded.
The maximum displacement is 9.8331. From left to
right and top to bottom, the first and last images be-
long to the original sequence. The four intermediate
frames have been interpolated. In Figure 6 we show
the holes generated by the interpolation process. The
left image shows the holes after forward interpolation,
the right image shows the remaining ones after back-
ward interpolation which we filled-in by inpainting.
Figure 7 shows the interpolation of four frames
from a sequence where a placard is being dis-
occluded. Figure 8 shows the interpolation
of an intermediate frame in the sequence Ur-
ban taken from Middlebury. The camera moves
right and there are occlusions between buildings.
The experiments displayed here can be found in
http://www.dtic.upf.edu/∼cballester/demos/scm .
In our experiments the computation time per
frame is around: 5 sec for optical flow computation,
0.55 sec for the intermediate frame interpolation and
1 min for the inpainting algorithm.
4 CONCLUSIONS
We have proposed an interpolation method to pro-
duce a sequence of plausible intermediate frames be-
tween two input images. The method is based on the
exploitation of the optical flow and the handling of
occlusions by means of a time coherent video seg-
mentation which produces a set of spatio-temporal re-
gions. Occlusions and dis-occlusions are identified as
the temporal boundaries where a region ends or starts,
respectively. With this we avoid the forward propaga-
tion of occluded regions. After forward propagation
of continuing regions, holes appear and we use the
backward flow to propagate information not belong-
ing to starting regions from next frame. The few re-
maining holes are filled-in by inpainting. The method
permits to avoid artifacts in occluding and disocclud-
ing regions. The method is sensitive to the quality of
the optical flow and requires flows of high quality.
ACKNOWLEDGEMENTS
We acknowledge partial support by MICINN project,
reference MTM2009-08171, and by GRC reference
Figure 3: Intermediate frame interpolation. The first and
last frames are original images. The intermediate ones are
interpolated.
Figure 4: Left: The holes appearing in the first interpolated
frame of Figure 3 after forward interpolation. Right: The
remaining holes after backward interpolation.
Figure 5: Intermediate frame interpolation. The first and
last frames are original images. The intermediate ones are
interpolated.
FRAME INTERPOLATION WITH OCCLUSION DETECTION USING A TIME COHERENT SEGMENTATION
371

Figure 8: Intermediate frame interpolation. The first and third frames are original images. The middle one is interpolated.
Figure 6: Left: The holes appearing in the last interpolated
frame of Figure 3 after forward interpolation. Right: The
remaining holes after backward interpolation.
Figure 7: Intermediate frame interpolation. The first and
last frames are original images. The intermediate ones are
interpolated.
2009 SGR 773. VC also acknowledges partial sup-
port by ”ICREA Acad`emia” prize for excellence in
research funded by the Generalitat de Catalunya.
REFERENCES
Alvarez, L., Deriche, R., Papadopoulo, T., and S´anchez,
J. (2007). Symmetrical dense optical flow estimation
with occlusions detection. Int. Journal of Comp. Vis.,
75:371–385.
Arias, P., Facciolo, G., Caselles, V., and Sapiro, G. (2011).
A variational framework for exemplar-based image in-
painting. Int. Journal of Comp. Vis., 93:319–347.
Baker, S., Scharstein, D., Lewis, J., Roth, S., Black, M.,
and Szeliski, R. (2011). A database and evaluation
methodology for optical flow. Int. Journal of Comp.
Vis., 92:1–31.
Barnes, C., Shechtman, E., Finkelstein, A., and Goldman,
D. B. (2009). PatchMatch: a randomized correspon-
dence algorithm for structural image editing. In Proc.
of SIGGRAPH, pages 1–11.
Brox, T., Bruhn, A., Papenberg, N., and Weickert, J. (2004).
High accuracy optical flow estimation based on a the-
ory for warping. In ECCV, pages 25–36.
Brox, T. and Malik, J. (2010). Large displacement optical
flow: descriptor matching in variational motion esti-
mation. IEEE Transactions on PAMI, pages 500–513.
Cafforio, C., Rocca, F., and Tubaro, S. (1990). Motion com-
pensated image interpolation. IEEE Transactions on
Communications, 38:215–222.
Criminisi, A., P´erez, P., and Toyama, K. (2004). Region
filling and object removal by exemplar-based image
inpainting. IEEE Trans. on IP, 13:1200–1212.
Dane, G. and Nguyen, T. (2004). Motion vector process-
ing for frame rate up conversion. In IEEE ICASSP,
volume 3, pages 309–312.
Herbst, E., Seitz, S., and Baker, S. (2009). Occlusion
reasoning for temporal interpolation using optical
flow. In Technical report UW-CSE-09-08-01. Dept.
of Comp. Sci. and Eng., University of Washington.
Ince, S. and Konrad, J. (2008). Occlusion-aware optical
flow estimation. IEEE Trans. on IP, 17:1443–1451.
Koepfler, G., Lopez, C., and Morel, J. (1994). A mul-
tiscale algorithm for image segmentation by varia-
tional method. SIAM Journal on Numerical Analysis,
31:282–299.
Linz, C., Lipski, C., and Magnor, M. (2010). Multi-image
interpolation based on graph-cuts and symmetric op-
tical flow. In 15th International Workshop on Vision,
Modeling and Visualization (VMV), pages 115–122.
Mahajan, D., Huang, F., Matusik, W., Ramamoorthi, R.,
and Belhumeur, P. (2009). Moving gradients: a path-
based method for plausible image interpolation. In
ACM SIGGRAPH, volume 28, pages 1–11.
Sun, D., Roth, S., and Black, M. (2010). Secrets of optical
flow estimation and their principles. In IEEE Confer-
ence on CVPR, pages 2432–2439.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
372
