
MACRO-CLASS SELECTION FOR HIERARCHICAL
K-NN CLASSIFICATION OF INERTIAL SENSOR DATA
Corey McCall, Kishore Reddy and Mubarak Shah
Dept. of Electrical Engineering and Computer Science, University of Central Florida, Orlando, USA
Keywords:
Macro-class Selection, Hierarchical Classification, Human Activity Recognition.
Abstract:
Quality classifiers can be difficult to implement on the limited resources of an embedded system, especially
if the data contains many confusing classes. This can be overcome by using a hierarchical set of classifiers
in which specialized feature sets are used at each node to distinguish within the macro-classes defined by the
hierarchy. This method exploits the fact that similar classes according to one feature set may be dissimilar
according to another, allowing normally confused classes to be grouped and handled separately. However,
determining these macro-classes of similarity is not straightforward when the selected feature set has yet to be
determined. In this paper, we present a new greedy forward selection algorithm to simultaneously determine
good macro-classes and the features that best distinguish them. The algorithm is tested on two human activity
recognition datasets: CMU-MMAC (29 classes), and a custom dataset collected from a commodity smart-
phone for this paper (9 classes). In both datasets, we employ statistical features obtained from on-body IMU
sensors. Classification accuracy using the selected macro-classes was increased 69% and 12% respectively
over our non-hierarchical baselines.
1 INTRODUCTION
Inertial Measurement Units (IMUs) have become per-
vasive in smartphones and consumer electronics de-
vices, and can be employed to recognize human ac-
tivities. In this paper, we attempt to classify a large
number of confusing aerobic and cooking activities
using statistical features computed from 9 degree-of-
freedom IMUs. Most previous research in this area
has focused on processing just a small number of ei-
ther simple classes on the device itself such as in
(Ganti et al., 2010) and (Saponas et al., 2008), or more
complex classes on a dedicated server such as in (Iso
and Yamazaki, 2008) and (Miluzzo et al., 2008). Al-
though high classification accuracy is achieved, real-
world applications would benefit from the ability to
classify a large number of confusing classes using the
minimal computational resources available on the de-
vice itself. This could allow for pervasive lifestyle
monitoring of more complex scenarios such as exer-
cise patterns, cooking habits, and disease symptoms,
all of which have been shown to be recognizable us-
ing on-body IMUs in (Ermes et al., 2008), (Spriggs
et al., 2009), and (Kim et al., 2009) respectively. In
order to run these types of applications on commodity
hardware, a low-cost classification method for a large
number of confusing classes must be developed.
We examine a hierarchical version of the low-cost
algorithm, k-Nearest Neighbor (k-NN). Because of
its simplicity, traditional k-NN does not perform well
when distinguishing between similar classes which
tend to cluster together in feature space. This can be
overcome by breaking the single k-NN classifier into
a hierarchical set of simpler k-NN classifiers in which
specialized feature sets are used at each node to dis-
tinguish within the mutually exclusive macro-classes
defined by the hierarchy. For example, the two dis-
tinct actions climbing stairs and descending stairs in a
dataset of aerobic actions may be easily distinguished
from other classes such as jumping and biking when
using a feature like mean forward acceleration. How-
ever, in the same feature space, these two actions are
easily confused with one another. If mean forward
acceleration is used to place these two actions in the
same macro class, a better feature such as mean up-
ward acceleration can be used at the second level to
distinguish between the two actions.
This hierarchical classification process is illus-
trated in Figure 1, in which test sample X is classified
into macro-class α, β, γ, or δ using a feature set, S
1
,
determined by feature selection. X is then classified
among a smaller subset of classes using S
2
, S
3
, S
4
, or
106
McCall C., Reddy K. and Shah M..
MACRO-CLASS SELECTION FOR HIERARCHICAL K-NN CLASSIFICATION OF INERTIAL SENSOR DATA.
DOI: 10.5220/0003819101060114
In Proceedings of the 2nd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2012), pages 106-114
ISBN: 978-989-8565-00-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
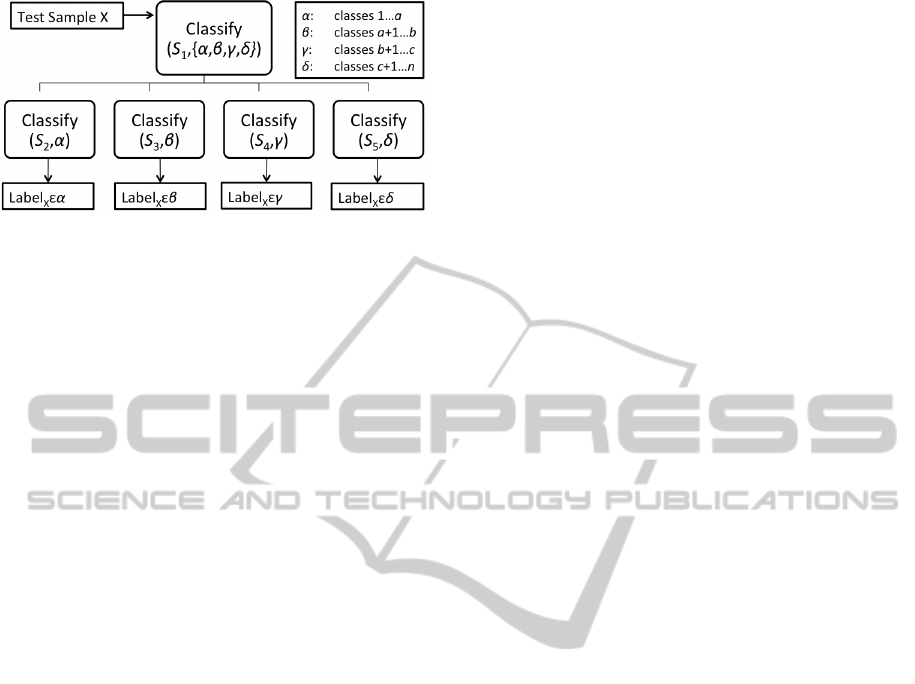
Figure 1: In this hierarchical model classifier, test sample X
is classified into mutually exclusive macro-class α, β, γ, or
δ using selected feature set S
1
. X is then classified among a
smaller set of classes using a reselected feature set S
i
which
better differentiates the classes within each macro-class.
S
5
(also determined by feature selection) depending
on the macro-class. This two-tiered hierarchical de-
sign increases efficiency by dividing the training data
and related k-NN time complexity by the four macro-
classes, and increases classification performance by
allowing normally confused classes to be grouped to-
gether and distinguished separately using a special-
ized set of features that differentiate them better than
the original S
1
. The keys to this method are: 1) ensur-
ing maximum accuracy in the top level, 2) determin-
ing appropriate macro-classes, and 3) selecting qual-
ity feature sets.
The focus of this paper is the development of
an algorithm that simultaneously determines good
macro-classes and the features that best distinguish
them, while attempting to maintain a high classifica-
tion accuracy at the top level of the hierarchy. We
modify a wrapper-model greedy forward selection al-
gorithm, such that for each candidate feature set, k-
means is used to cluster the mean-centers of each
class according to the training set. A score is then de-
termined by combination of the accuracy of the clus-
tering, the number of clusters, and the evenness of the
class distribution across the clusters. As single fea-
tures are added at each iteration, the clustering accu-
racy increases while the score is maximized until an
accuracy threshold is achieved. The accuracy of the
training set is then considered adequate, and a mod-
ified scoring equation is used to optimize the class
distribution while maintaining an accuracy above the
threshold. Standard greedy forward selection is then
used to select features for each classifier in the second
level of the hierarchy.
The rest of this paper proceeds as follows. In Sec-
tion 2, we discuss related work on macro-class selec-
tion. In Section 3, we discuss the macro-class selec-
tion algorithm. In Section 4, we discuss the datasets
and features used to test the algorithm. In Section 5,
we compare the non-hierarchical baseline results with
those obtained with the hierarchical model. In Sec-
tion 6, we conclude the paper with a discussion of our
results.
2 RELATED WORK
The most relevant work in macro-class selection
for hierarchical classification is given in (Wang and
Casasent, 2008). An algorithm based on “weighted
support vector k-means clustering” uses clustering to
select macro-classes to form a hierarchical classifier
for multi-class classification using a binary classifier
at each node. This is similar to the one used in this
paper in that similar classes are grouped together by
clustering to build the hierarchy. However, we note
two key differences. First, this method does not in-
clude feature selection, an integral part of our moti-
vation to use multiple feature sets to improve classi-
fication performance of confusing classes. And sec-
ond, this method builds a hierarchy with an undefined
number of levels based on the number of classes (each
node can handle exactly two classes/macro-classes),
whereas our method is restricted to two levels. Our
intuition is that we can minimize the misclassifica-
tion of the testing data into the wrong macro-class
by limiting the number of levels in the hierarchy to
the minimum of two. Since we are attempting to im-
prove the accuracy over a non-hierarchical baseline,
any misclassification at the top level disqualifies the
test sample from being correctly classified.
In the context of feature selection using unsuper-
vised learning, (Zeng and Cheung, 2009) and (Law
et al., 2004) use feature selection with mixture model
clustering to successfully group unlabeled data. Un-
like our greedy approach, the authors’ focus on re-
moving irrelevant or redundant features at each itera-
tion of the algorithm. We choose a greedy algorithm
because of its ability to find a smaller good solution
by starting with an empty set, reducing the complex-
ity of the resulting k-NN algorithm (perfect feature
selection is considered intractable (Kohavi and John,
1997)). Additionally, we choose a wrapper-model al-
gorithm, as opposed to filter-model, because of it’s
proven superiority in (Liu and Yu, 2005) and (Ta-
lavera, 2005). According to this research, the wrap-
per model gives better performance at the cost of a
more computationally expensive algorithm, which is
acceptable considering that the algorithm is only per-
formed in the training phase.
We also review previous work done on the CMU-
MMAC Dataset in (Spriggs et al., 2009) and (Fisher
and Reddy, 2011). Although these papers do not
use macro-classes, they provide quality baselines us-
MACRO-CLASS SELECTION FOR HIERARCHICAL K-NN CLASSIFICATION OF INERTIAL SENSOR DATA
107

ing more complex classifiers such as Support Vector
Machines, Hidden Markov Models, and Neural Net-
works. We discuss these results in Section 6.
Overall, the research presented in this paper ex-
tends the small amount of previous work done in
macro-class selection. The main contribution is
an algorithm that simultaneously determines quality
macro-classes and features for k-NN classification.
The result is a set of macro-classes that can be used to
build a hierarchical k-NN classifier that improves the
overall accuracy of the model when there are a large
number of confusing classes.
3 METHOD
We present our method in three parts. In Section 3.1,
we present a straightforward feature selection algo-
rithm that we use to select features for each clas-
sifier in the second level of the hierarchy after the
macro-classes have been determined. In Section 3.2,
we modify the algorithm for macro-class selection,
which we use to select features for the classifier at the
top level of the hierarchy, as well as the macro-classes
that define the second level. In Section 3.3, we show
how both algorithms are combined to build the final
hierarchical classifier.
3.1 Base Feature Selection
Figure 2 shows a basic wrapper-model greedy for-
ward selection algorithm for feature selection. Input
to the algorithm are the training set X, consisting of M
examples, each with a pool of N scaled potential fea-
tures, and y, the corresponding label vector. The algo-
rithm keeps track of accuracy A, and a selected feature
set S. At each iteration, an exhaustive set of candidate
feature sets is built by combining the current S with
one of the potential features not in S. Each candi-
date set S ∪ {i} is then evaluated using a k-NN clas-
sifier with k-fold cross validation, where in this case,
k is equal to 5% of the size of the training data. In
this k-NN classifier, and all subsequently referenced
in this paper, we use one nearest neighbors. If the
maximum accuracy a achieved from testing each po-
tential S ∪ {i} is less than A, S is returned as the se-
lected feature set. Otherwise, A is updated to a, and
the corresponding potential feature b is added to S.
In an attempt to further reduce the feature set and
generalize it from the training data, we eliminate all
features added to S after the final accuracy stopped
increasing, as these features are assumed to overspec-
ify the model to the training data. For example, if the
algorithm reaches its maximum accuracy after 10 ite-
Input: X ∈ R
M×N
, y ∈ R
M
Output: S
[A,S] ← [0,
/
0]
while |S| < N do
[a,b] ← [0,0]
for all i ∈ {1,...,N} \ S do
a
i
← KNN(X
S∪{i}
,y)
if a
i
> a then
[a,b] ← [a
i
,i]
end if
end for
if a < A then
break
end if
[A,S] ← [a,S ∪ {b}]
end while
Figure 2: We use this wrapper-model greedy forward se-
lection algorithm to select features for the classifiers on the
second level of the hierarchy.
rations, several unnecessary features may be added
which do not increase the accuracy, but may help find
a better solution later on in the greedy process.
3.2 Combined Macro-class Selection
Figure 3 shows an expanded algorithm that is modi-
fied to select macro-classes as it iterates. In addition
to the training data and label vector, it also requires
the target accuracy threshold t, and the total number
of classes n. The algorithm then outputs the selected
feature set as well as L, a class map that assigns each
class to one of p macro-classes, and C, the center of
each macro-class in feature space.
The algorithm starts by selecting a moderate k for
k-means clustering by taking the floor of n/
2
. It then
tracks the selected feature set, the accuracy, and the
corresponding outputs L and C. It then functions in
the same iterative manner with the main difference be-
ing that the performance metric is based on the quality
of the clustering at each iteration, not solely the clas-
sification accuracy as in the algorithm in Section 3.1.
The first step in the clustering process is to calcu-
late the mean of each class in feature space (line 6 in
Figure 3). The CMEAN function simply returns this
set of points. These points are then clustered using a
modified k-means algorithm, KMEANS2. This func-
tion clusters the input into a maximum of k clusters,
where at each iteration, clusters that are empty or con-
tain less than two points are automatically dropped.
This liberal dropping scheme allows the algorithm to
determine the number of clusters in a more unsuper-
vised manner, rather than attempting to force k clus-
ters. KMEANS2 returns the cluster centers c
i
, the
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
108

Input: X ∈ R
M×N
, y ∈ R
M
,t, n
Output: S,L,C ∈ R
p×|S|
1: k = bn/
2
c
2: [A,S,L,C] ← [0,
/
0,
/
0,
/
0]
3: while |S| < N do
4: [a,b,ψ,l, c] ← [0, 0, 0,
/
0,
/
0]
5: for all i ∈ {1,...,N} \ S do
6: µ ← CMEAN(X
S∪{i}
,y)
7: {c
i
, p
i
,q} ← KMEANS2(µ,k)
8: {a
i
,l
i
} ← KNN2(X
S∪{i}
,c
i
,q)
9: if A < t then
10: ψ
i
← (p
i
> 1&@
/
0 ∈ l
i
&a
i
>
A)?Θ(a
i
, p
i
,l
i
):0
11: else
12: ψ
i
← (p
i
> 1&@
/
0 ∈ l
i
&a
i
>
t)?Φ(a
i
, p
i
,l
i
):0
13: end if
14: if ψ
i
> ψ then
15: [a,ψ,b,l, c] ← [a
i
,ψ
i
,i,l
i
,c
i
]
16: end if
17: end for
18: if ψ = 0 then
19: break
20: end if
21: [A,S,L,C] ← [a,S ∪ {b},l,c]
22: end while
Figure 3: We use this modified algorithm to select features
for the classifier on the top level of the hierarchy as well as
determine the macro-classes that define the second level.
number of clusters p
i
, and a class map q.
The accuracy of the clustering is then determined
by a modified k-NN algorithm, KNN2 (line 8). This
function first runs a standard k-NN on X
S∪{i}
, using c
i
and q as a training data. KNN2 assigns each class to
a macro-class cluster based on its popularity, forming
a new class map l
i
. This is done instead of maintain-
ing q in an attempt to salvage good clusters that were
not evident in the mean centers, but are in the actual
training data. l
i
and related accuracy a
i
are returned.
Unlike the base algorithm in Section 3.1, our goal
is not to simply maximize the accuracy. We aim
to maximize the quality of the macro-classes while
maintaining a “good enough” accuracy. We attempt
this by building the algorithm to run in two phases.
In the first phase (line 10), the feature with the high-
est score at each iteration is chosen as long as the
accuracy is increased, emphasizing accuracy in the
score equation Θ (Equation 1). If accuracy is not in-
creased, the feature is disqualified by setting its score
to zero. Once a certain accuracy target t is achieved,
the algorithm continues to execute in the second phase
(line 12). In this phase, the feature with the highest
score is chosen as long as the accuracy is above the
target threshold, de-emphasizing accuracy in a differ-
ent score equation Φ (Equation 2). In both phases,
clustering that results in less than two macro-classes
or empty macro-classes is automatically disqualified.
Θ =
a
2
i
p
3
i
Γ(l
i
)
4
(1)
Φ =
a
i
p
3
i
Γ(l
i
)
4
(2)
In the score equations, the Gamma function rep-
resents the frequency range of the class distribution
of the given class map. For example, if l
i
maps two
classes to macro-class α, and six classes to macro-
class β, then Γ(l
i
) = 6 − 2 = 4. In general, the equa-
tions guide the algorithm to choose a feature set and
macro-classes such that the accuracy and number of
macro-classes is high, and the frequency range of the
class distribution is low. In the ideal case, this should
produce a fairly even class distribution with a high
clustering accuracy of the training data.
The algorithm exits when either the current itera-
tion disqualifies all candidate feature sets, or all fea-
tures have been evaluated. We note that in actual im-
plementation, we run this algorithm five times, using
the result with the highest accuracy. This is to account
for the randomness of k-means starting points. Tra-
ditionally, this is solved by using several “replicate”
starting points in the k-means algorithm itself, choos-
ing the clusters with the lowest within-cluster sums
of point-to-centroid distances. We choose to rerun the
entire algorithm because we are not necessarily inter-
ested in the best defined clusters, but rather how well
they align with the training data.
3.3 Hierarchical Classification
The process for building the hierarchical classifier
from the algorithms in Figures 2 and 3 is given in the
following list.
1. Use the training data X and y, and an estimated
target accuracy t with the algorithm in Section 3.2
to select features and macro-classes for the top
level of the hierarchy.
2. Train a k-NN classifier using the selected features
of X with the computed class map as the label vec-
tor, classifying the test sample into a macro-class.
3. Using the algorithm in Section 3.1, select features
for each macro-class according to the class map.
4. Train a single k-NN for each macro-class, using
only the training data corresponding to the macro-
class’s particular class set.
The process for classifying a test sample was giv-
MACRO-CLASS SELECTION FOR HIERARCHICAL K-NN CLASSIFICATION OF INERTIAL SENSOR DATA
109
en in Figure 1. Using the two-tier structure, the test
sample is processed through two k-NN classification
algorithms, the first to determine its macro-class, and
the second to determine its final label.We note that al-
though the added k-NN algorithm at the top level adds
a second stage, the overall computational cost is re-
duced. This is because the k-NN algorithm at the top
level is very inexpensive considering that the train-
ing set consists of only a single point per macro-class.
At the second level, the dominating cost factor of the
algorithm (calculating the test sample’s distance from
each of the training points) is divided with the training
data between the mutually exclusive macro-classes.
4 EXPERIMENT SETUP
We test our method on human activity recognition us-
ing data collected from on-body IMU sensors. Com-
putationally inexpensive features are computed from
the data, and fed into the algorithms in Section 3 to
form the hierarchical classifier. We then compare the
results to those obtained using the non-hierarchical
model built using only the base algorithm in Sec-
tion 3.1. Our goal is to show that the macro-classes
and features selected are good enough to improve the
overall performance over the non-hierarchical model.
In order for this to be achieved, there must be a
high enough performance increase by using special-
ized features on each macro-class to justify the loss in
accuracy by misclassifying data at the top level.
4.1 Datasets
We utilize two datasets: a subset of the Carnegie Mel-
lon University Multimodal Activity (CMU-MMAC)
Database (la Torre and Hodgins, 2009), and a dataset
we collected from a smartphone. In both datasets,
each IMU recorded instantaneous 3D acceleration
(accelerometer), angular velocity (gyroscope), and
orientation (magnetometer). An example of this data
is given in Figure 4. Both datasets are about the same
size, however the CMU-MMAC dataset contains
more IMUs, resulting in a larger candidate feature
pool. This is because features are computed across
each dimension of each IMU. The CMU-MMAC
dataset also contains significantly more classes, re-
sulting in less average training data per class.
The full CMU-MMAC dataset consists of many
subjects cooking a particular recipe in an unscripted
manner while being observed by multiple sensors, in-
cluding video cameras, IMUs, motion capture, and
microphones. We use a subset of this data consist-
ing of labeled data from 5 125Hz IMUs attached to
Table 1: A list of the actions in the CMU-MMAC dataset.
1. close-fridge 16. read-box
2. crack-egg 17. spray-pam
3. open-box 18. stir-bowl
4. open-cupboard1 19. stir-egg
5. open-cupboard2 20. switch on
6. open-fridge 21. take-pan
7. pour-bowl-in-pan 22. take-egg
8. pour-bag-in-bowl 23. take-fork
9. pour-oil-in-bowl 24. take-oil
10. pour-oil-in-cup 25. take-pam
11. pour-water-in-bowl 26. twist off-cap
12. pour-water-in-cup 27. twist on-cap
13. put-pan-in-oven 28. walk–to-counter
14. put-oil-in-cupboard3 29. walk–to-fridge
15. put-pam-in-cupboard3
Table 2: A list of the actions in the smartphone dataset.
1. Biking 6. Running
2. Climbing 7. Standing
3. Descending 8. Treadmill Walking
4. Exercise Biking 9. Walking
5. Jump Roping
the subjects arms, legs, and back. The subset con-
tains 395 examples of 29 variable-length actions per-
formed by 12 subjects cooking the brownie recipe.
Labels were provided by the authors of (Taralova,
2009). The actions were chosen according to those
used in (Spriggs et al., 2009) and (Fisher and Reddy,
2011). These actions were manually segmented out of
the dataset, and all other activity was ignored. These
actions are given in Table 1. The algorithms perfor-
mance on unsegmented data is outside of the scope of
this paper, and is the focus of our future work.
The smartphone dataset was collected for this pa-
per. Each subject was given an Apple iPhone 4 loaded
with the Sensor Data application and a piece of pa-
per with the list of actions. The subject was then
instructed to start the application, perform the ac-
tion, stop the application, then write the index num-
ber next to the corresponding name on the labeling
paper. Each action was recorded 5 times by 10 sub-
jects using the single 60Hz IMU built into the phone.
This resulted in 383 total action examples (not all sub-
jects participated in each action). Once the data was
recorded, we downloaded it according to the labels
and manually trimmed each example to an 8.33 sec-
ond clip for classification. We note that it is possible
that the task scheduler on the phone may be accessing
the sensor at a lower frequency, resulting in an incon-
sistent sample rate. The 9 actions are given in Table 2.
These datasets are ideal for testing our method,
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
110
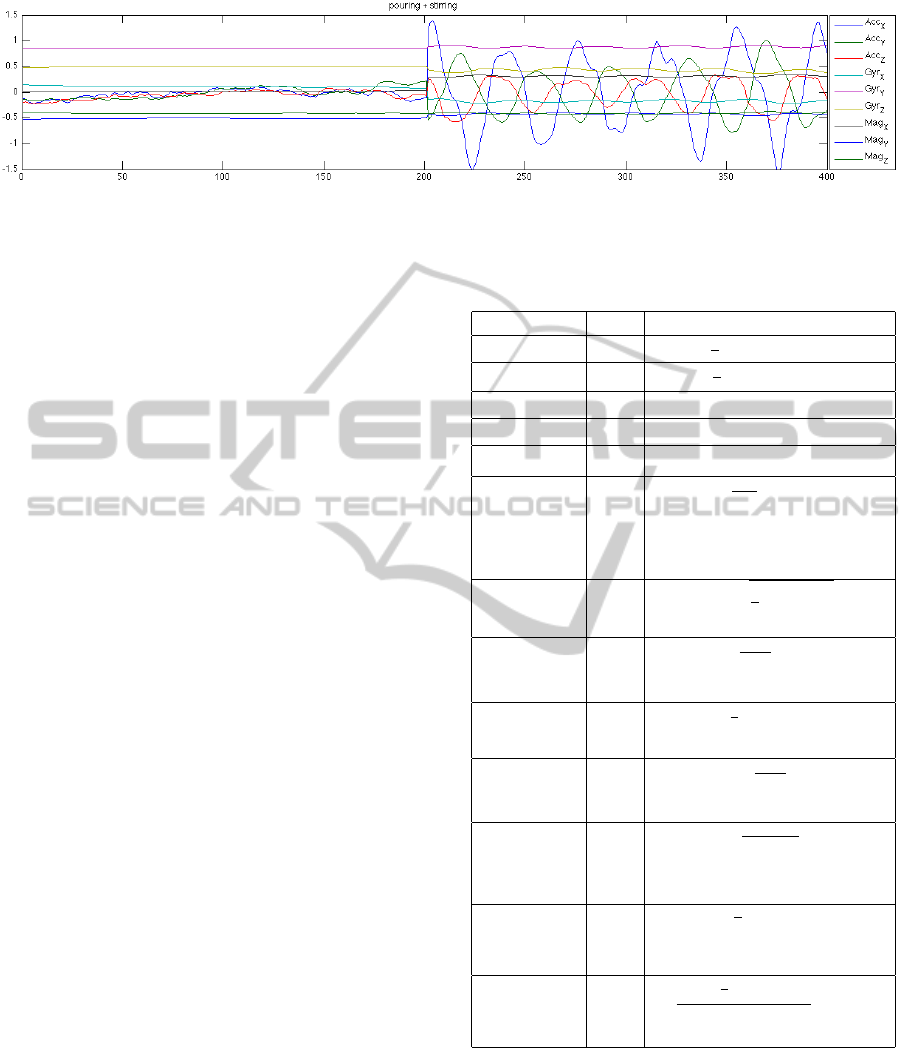
Figure 4: Each IMU in the dataset produces 9 data streams from a 3D accelerometer (Acc
X,Y,Z
), Gyroscope (Gyr
X,Y,Z
), and
Magnetometer (Mag
X,Y,Z
). This example shows the data stream from an IMU mounted on a subject’s right arm while pouring
and then stirring brownie mix. The data recorded during the transitions was removed from the dataset for our experiments.
mainly because the actions listed in Tables 1 and 2
are confusing because they are performed with sim-
ilar movement. For example, in the smartphone
dataset, the classifier must distinguish walking vs.
treadmill walking as well as climbing stairs vs. de-
scending stairs and biking vs. exercise biking. The
CMU-MMAC dataset has more confusing action sets
such as walk-to-fridge vs. walk-to-counter and open-
cupboard1 vs. open-cupboard2. The CMU-MMAC
dataset also contains a larger number of classes.
4.2 Feature Calculation
We compute 13 variable-length statistical features
across the 9 dimensions of each IMU sensor. These
features, defined in Table 3, form 105 potential fea-
tures for each IMU. For the CMU-MMAC dataset,
this translates to 525 features for the 5 IMUs, and for
the smartphone dataset, this translates to 105 features
for the single IMU. In each of the formulas, X
j
i
repre-
sents the ith data point of the jth dimension of the sen-
sor X (accelerometer, gyroscope, magnetometer). We
use these statistical features instead of the traditional
frequency domain or PCA features because they are
less computationally expensive to calculate, and have
been proven to be effective activity recognition de-
scriptors of IMU data in (Miluzzo et al., 2008), (Er-
mes et al., 2008), and (Karantonis et al., 2006).
4.3 Testing Procedure
We test each dataset according to the hierarchical
classification procedure listed in Section 3.3. Leave-
one-subject-out cross validation is used in order to test
the method on each subject independently, excluding
that subject’s data from the training data used to build
the model. The results of each subject are concate-
nated to calculate the final accuracy across the entire
dataset. The target clustering accuracy value t is se-
lected to be 90% and 95% for the CMU-MMAC and
smartphone datasets respectively. A lower target ac-
curacy is used for the CMU-MMAC dataset because
Table 3: Statistical features calculated from the IMU data.
Feature Size Formula
Mean 9 µ
X
j
=
1
`
∑
`
i=1
X
j
i
Variance 9 σ
2
X
j
=
1
`
∑
`
i=1
(X
j
i
− µ)
2
Minimum 9 min
X
j
= minimum(X
j
i
)
Maximum 9 max
X
j
= maximum(X
j
i
)
Range 9 range
X
j
= max
X
j
i
− min
X
j
i
Mean
Crossing
Rate
9 mcr
X
j
=
1
`−1
∑
N−1
i=`
ϒ{(X
j
i
−
µ
X
j
)(X
j
i+1
− µ
X
j
) < 0},
where ϒ is the indicator
function
Root Mean
Square
9 rms
X
j
=
q
1
`
∑
`
i=1
X
j
i
2
Skew 9 skew
X
j
=
1
`σ
3
X
j
∑
`
i=1
(X
j
i
−
µ
X
j
)
3
Average
Entropy
9 H
X
j
= −
1
`
∑
`
i=1
p(X
j
i
)
log(p(X
j
i
))
Kurtosis 9 kurt
X
j
=
1
`σ
4
X
j
∑
`
i=1
(X
j
i
−
µ
X
j
)
4
Correlation 9 corr
X
ab
=
1
`σ
X
a
σ
X
b
∑
`
i=1
(X
a
i
− µ
X
a
)(X
b
i
− µ
X
b
),
for [a,b]={[1,2],[1,3],[2,3]}
Average
Magnitude
Area
3 SMA
X
=
1
`
∑
`
i=1
(|X
1
i
|+
|X
2
i
| + |X
3
i
|)
Average
Energy
Expenditure
3 EE
X
=
1
`
∑
`
i=1
q
X
1
i
2
+ X
2
i
2
+ X
3
i
2
of the larger number of classes.
5 RESULTS
For each dataset, we present the total classification
accuracy of the hierarchical model compared to the
MACRO-CLASS SELECTION FOR HIERARCHICAL K-NN CLASSIFICATION OF INERTIAL SENSOR DATA
111

non-hierarchical baseline. The top-level clustering
accuracy is also given in order to indicate how well
the macro-classes selected from the training data were
able to be generalized to the testing data, recalling that
top-level classification accuracy significantly impacts
performance in a hierarchical classifier since it is es-
sentially the maximum achievable total accuracy.
In addition to classification results, we also
present a novel 2D histogram matrix to show the gist
of the macro-classes selected for each dataset. The
matrices shown in Figures 6 and 7 visualize how of-
ten each class is grouped into the same macro-class
as another after the algorithm has run on all of the
subjects. Each row corresponds to a class, and the
intensity of the marking at each corresponding col-
umn represents the frequency in which the row class
was grouped into the same macro-class as the column
class. For example, the first row in Figure 6 indicates
that action 1 is always grouped into the same macro-
class as actions 4, 6, 12, 17, 22, 23, 28, and 29 since
the marks at these columns of row 1 are completely
black. Action 5 is grouped into the same macro-class
as action 1 about 60% of the time, indicated by the
gray mark in column 5.
In addition to visualizing the gist of the selected
macro-classes, the histogram matrix can also visually
depict the quality and nature of the selected-macro
classes. The quality of the macro-class selection is
indicated by the ability of the algorithm to group the
same classes into a macro-class regardless of which
subjects the algorithm is trained on. This can be seen
in the previous example in which the column classes
with completely black marks in row 1 were always
grouped together regardless of the training set used
during cross validation. In general, we can say that a
matrix consisting of mostly black or white marks is of
good quality because the macro-classes are well de-
fined across different training sets with close to 100%
or 0% matching. Additionally, if the classes are listed
in such a way that the naturally similar classes are ad-
jacent, dark clusters will form if the naturally similar
classes are generally grouped into the same macro-
class. This is further explained in Section 5.1.
In order to aid future feature selection research,
we also review which features from Table 3 were se-
lected when using each model.
5.1 CMU-MMAC Results
The classification results for the CMU-MMAC
dataset are given in Figure 5. The classification accu-
racy using the hierarchical model was 44%, a 69% im-
provement over the non-hierarchical baseline of 26%.
The top-level clustering accuracy was 89%.
Figure 5: The final results show that the hierarchical clas-
sifier built using the algorithms presented in this paper out-
performs the non-hierarchical baseline in both datasets. The
high top-level clustering accuracy in both datasets indicates
the high quality of the selected macro-classes.
The histogram matrix in Figure 6 shows the gist
of the macro-class selection. Most of the graph is
completely white or very dark, indicating good qual-
ity macro-classes. In this matrix, the classes are listed
in lexicographical order, making naturally similar ac-
tions beginning with the same verb (e.g. pour-oil-in-
bowl, pour-water-in-bowl) adjacent to one another. In
this way, it can be seen that some of the macro-classes
correspond to naturally similar classes. Specifically,
the pouring actions in rows 7-11 are always grouped
together with the other pouring actions in columns
7-11, the stirring actions in columns 18-19, and the
twisting actions in columns 26-27. Theses groups are
emphasized by colored ellipses in Figure 6. The aver-
age number of macro-classes created from the 29 base
classes was 4.
5.2 Smartphone Results
The classification results for the smartphone dataset
are also given in Figure 5. The total classification
accuracy using the hierarchical model was 76%, a
12% improvement over the non-hierarchical baseline
of 68%. The top-level clustering accuracy was 88%.
The histogram matrix for the smartphone dataset
is given in Figure 7. Like the CMU-MMAC dataset,
most of the marks on the graph are completely white
or very dark, indicating good, subject-independent
macro-classes. We can also see that the intersec-
tions of naturally similar classes such as climb-
ing/descending and running/walking are filled with
completely black marks, indicating that these classes
were grouped together every time. The average num-
ber of macro-classes created from the 9 base classes
was 2.6.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
112
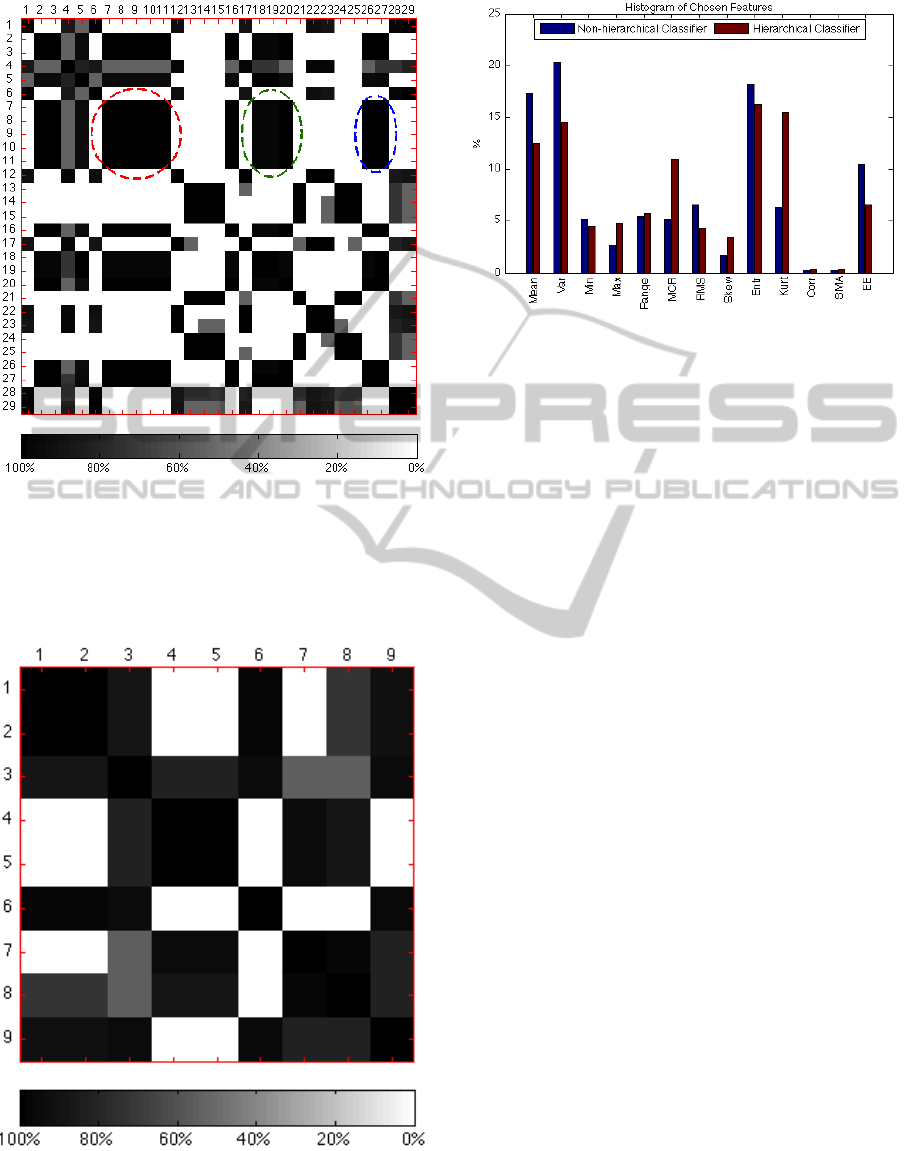
Figure 6: The histogram matrix for the CMU-MMAC
dataset. The red, green, and blue ellipses highlight how the
pouring actions are generally grouped with the other pour-
ing actions, the stirring actions, and the twisting actions re-
spectively. The index numbers correspond to the actions
listed in Table 1.
Figure 7: The histogram matrix for the smartphone dataset.
The index numbers correspond to the actions listed in Ta-
ble 2.
Figure 8: Histogram showing the distribution of the selected
features across both datasets for the non-hierarchical and
hierarchical models. The bottom labels correspond to the
features listed in Table 3.
5.3 Feature Selection Results
The distribution of the features selected is given in
Figure 8. In general, the overall most useful features
were mean, variance, and entropy, having the highest
distribution in both models. The least useful features
were the correlation and signal magnitude area, hav-
ing the lowest distribution in both models. We also
note that the standard deviation of the distribution of
the hierarchical model is 5.6, which is less than the 6.8
of the non-hierarchical model. This implies that the
features were more evenly distributed in the hierarchi-
cal model. This is expected considering that features
that are less descriptive overall are eliminated in fea-
ture selection for the non-hierarchical model, but can
be used as specialized features in one of the hierarchi-
cal model’s subclassifiers. This is specifically evident
in the mean crossing rate and kurtosis features, both
of which more than doubled their representation in the
hierarchical model.
6 CONCLUSIONS
The results show that our algorithm performs well
in selecting macro-classes and features for hierarchi-
cal classification, as accuracy was improved in both
datasets over the non-hierarchical baseline. We note
that with the exception of one subject, the hierar-
chical classifier either matches or outperforms the
non-hierarchical baseline for every individual subject.
This empirically shows that the macro-classes and
features selected by our algorithm are useful in cre-
ating the hierarchical k-NN classifier. We emphasize
that the improvement was much greater in the more
MACRO-CLASS SELECTION FOR HIERARCHICAL K-NN CLASSIFICATION OF INERTIAL SENSOR DATA
113

complex CMU-MMAC dataset (69% vs. 12%). This
is because the hierarchical classifier was built to group
and handle similar classes separately with specialized
features. Therefore, the more confusing dataset yields
a higher improvement.
However, we do recognize that although we out-
perform the non-hierarchical baselines, the resulting
accuracies are still low compared to previous work in
(Fisher and Reddy, 2011). This is because, instead of
focusing on the maximization of total accuracy as in
previous work, we focus on generating quality macro-
classes and testing the performance impact of using
the respective specialized feature sets. In an effort
to minimize the computational cost of our resulting
algorithm, we use computationally inexpensive sta-
tistical features and k-NN classification on the sec-
ond level of the hierarchy. Our accuracy would most
likely be substantially improved at the cost of com-
putational resources by using the more complex fea-
tures and classification methods of previous work on
the second level of the hierarchy. Once the test sample
has been correctly classified into a macro-class at the
top level (which we achieve very high performance),
we note that any type of feature set or classifier can
be used by the subsequent classification nodes.
Overall, we contribute a new algorithm to improve
the performance of the k-NN classifier by building a
hierarchical classification model with specialized fea-
ture selection. Our results show significant improve-
ment over the baseline, with the possibility to improve
further by using more complex features or classifiers
on the bottom level of the hierarchy.
ACKNOWLEDGEMENTS
Data used in this paper was obtained from
kitchen.cs.cmu.edu and the data collection was
funded in part by the National Science Foundation un-
der Grant No. EEEC-0540865.
REFERENCES
Ermes, M., Parkk, J., Mantyjarvi, J., and Korhonen, I.
(2008). Detection of daily activities and sports with
wearable sensors in controlled and uncontrolled con-
ditions. IEEE Transactions on Information Technol-
ogy in Biomedicine, 12(1).
Fisher, R. and Reddy, P. (2011). Supervised multi-modal
action classification. Technical report, Carnegie Mel-
lon University.
Ganti, R., Srinivasan, S., and Gacic, A. (2010). Multisensor
fusion in smartphones for lifestyle monitoring. In Pro-
ceedings of 2010 International Conference on Body
Sensor Networks.
Iso, T. and Yamazaki, K. (2008). Gait analyzer based on
a cell phone with a single three-axis accelerometer.
In Proceedings of 6th ACM Conference on Embedded
Networked Sensor Systems.
Karantonis, D., Narayanan, M., Mathie, M., Lovell, N., and
Celler, B. (2006). Implementation of a real-time hu-
man movement classifier using a triaxial accelerome-
ter for ambulatory monitoring. IEEE Transactions on
Information Technology in Biomedicine, 10(1).
Kim, K.-J., Hassan, M. M., Na, S., and Huh, E.-N. (2009).
Dementia wandering detection and activity recogni-
tion algorithm using tri-axial accelerometer sensors.
In Proceedings of the 4th International Conference on
Ubiquitous Information Technologies & Applications.
Kohavi, R. and John, G. H. (1997). Wrappers for feature
subset selection. Artificial Intelligence, 97(1-2).
la Torre, F. D. and Hodgins, J. (2009). Guide to the
carnegie mellon university multimodal activity (cmu-
mmac) database. Technical Report CMU-RI-TR-08-
2, Carnegie Mellon University.
Law, M., Figueiredo, M., and Jain, A. (2004). Simultaneous
feature selection and clustering using mixture models.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 26(9).
Liu, H. and Yu, L. (2005). Toward integrating feature selec-
tion algorithms for classification and clustering. IEEE
Transactions on Knowledge and Data Engineering,
17(4).
Miluzzo, E., Lane, N., Fodor, K., Peterson, R., Lu, H., Mu-
solesi, M., Eisenman, S., Zheng, X., and Campbell,
A. (2008). Sensing meets mobile social networks: The
design, implementation and evaluation of the cenceme
application. In Proceedings of 6th ACM Conference
on Embedded Networked Sensor Systems.
Saponas, T. S., Lester, J., Froehlich, J., Fogarty, J., and Lan-
day, J. (2008). ilearn on the iphone: Real-time human
activity classification on commodity mobile phones.
Cse technical report, University of Washington.
Spriggs, E., la Torre Frade, F. D., and Hebert, M.
(2009). Temporal segmentation and activity classifi-
cation from first-person sensing. In Proceedings of
IEEE Workshop on Egocentric Vision at Conference
on Computer Vision and Pattern Recognition.
Talavera, L. (2005). An evaluation of filter and wrapper
methods for feature selection in categorical clustering.
In Proceedings of 6th International Symposium on In-
telligent Data Analysis.
Taralova, E. (2009). Cmu multi-modal activity dataset an-
notations. In http://www.cs.cmu.edu/ espriggs/cmu-
mmac/annotations/.
Wang, Y.-C. F. and Casasent, D. (2008). New sup-
port vector-based design method for binary hierarchi-
cal classifiers for multi-class classification problems.
Neural Networks, 21(2-3).
Zeng, H. and Cheung, Y.-M. (2009). A new feature selec-
tion method for gaussian mixture clustering. Pattern
Recognition, 42(2).
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
114
