
DYNAMIC WEIGHTING BASED ACTIVE CURVE
PROPAGATION METHOD FOR VIDEO OBJECT SELECTION
Marwen Nouri
1,2
, Emmanuel Marilly
1
, Olivier Martinot
1
and Nicole Vincent
2
1
Alcatel-Lucent Bell Labs, Paris, France
2
LIPADE, Paris Descartes University, Paris, France
Keywords: Interactive System, Video Object Selection, Scribbles based Segmentation, Scribbles Propagation.
Abstract: Improving video user experience is an essential task allowing video based algorithms and systems to be
more user-friendly. This paper addresses the problem of video object selection by introducing a new
interactive framework based on the minimization of the Active Curve energy. Prior assumption and
supervised learning can be used to segment images using both color and morphological information. To deal
with the segmentation of arbitrary high level object, user interaction is needed to avoid the semantic gap.
Hard constraints such scribbles can be drown by user on the first video frame, to roughly mark the object of
interest, and there are then automatically propagated to designate the same object in the remainder of the
sequence. The resulting scribbles can be used as hard constraints to achieve the whole segmentation process.
The active curve model is adapted and new forces are included to govern the curves evolution frame by
frame. A spatiotemporal optimization is used to ensure a coherent propagation. To avoid weight definition
problem, as in classical active curve based algorithms, a new concept of dynamically adjusted weighting is
introduced in order to improve the robustness of our curve propagation.
1 INTRODUCTION
In the context of immersive video experience, some
of the key questions are: What can immersion bring
to communication, entertainment or human machine
interaction? How to introduce immersion? One
important research track related to those general
questions is: how to better understand video in real-
time? The main issue here is the semantic gap issue,
that is, the way to transform low level description of
the video (computer vision, signal processing) into
high level understanding. In the case of object
segmentation, the process of separating an image
into foreground and background regions using a hard
binary labeling, which can be also extended by
finding a smooth alpha channel, known as image
matting, some methods (Joshi et al., 2006) or
(McGuire et al., 2005) introduce extra information
coming hardware, such camera array, multi-focus
imaging …, or also from learning technics to fill this
semantic gap. The problem with these methods is
their lack of ability to handle various types of object.
When the objects are not rigid, the learning becomes
difficult; the problem of object representation has to
be addressed. Other approaches introduce interactive
or user guided algorithms to take advantage of prior
information on what or how the object is. This
allows to deal with topology changes and to remove
confusions. In recent years, a big progress has been
achieved on interactive object segmentation and
matting methods in the case of still images, which is
well described in (Wang and Cohen, 2007). Two
types of user interaction have been involved: the
scribbles and silhouette. The scribbles are strokes
placed roughly by the user to indicate the
background and the foreground (Boykov et al.,
2001). The silhouette is a coarsely tracing of the
object’s boundary which allows the construction of a
trimap which is a three part image partitioning
(foreground, background and unknown region)
(Chuang et al., 2001.). High quality results can be
achieved for fairly complex images. However, when
dealing with videos, the user interaction is more
difficult to get. (Wang et al., 2005) introduced a new
way to let user make scribbles directly on 3D
temporal video volume, this kind of interaction is
not natural because visualizing and understanding
information on video volume is not easy. In (Bai and
Sapiro, 2007) the user is asked to act on different
key frames. The choice of key frames is important
5
Nouri M., Marilly E., Martinot O. and Vincent N..
DYNAMIC WEIGHTING BASED ACTIVE CURVE PROPAGATION METHOD FOR VIDEO OBJECT SELECTION.
DOI: 10.5220/0003818500050011
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 5-11
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

and often depends on the video. A complete
segmentation of the object of interest is achieved on
these frames, and then this segmentation is
interpolated and propagated to extract the video
objet.
(a) (b)
Figure 1: (a) Example of a scribble drawn by the user. (b)
A set of curve’s points representing discretized scribble.
This paper focuses on minimal user interactions
that could enable video object segmentation and
matting. We proposed an interactive method, which
aims at tracking a moving object and designate it
through video frames. The user is asked to designate
an object of interest by drawing scribbles (or
curves). Then, the problem is to propagate these
scribbles in next frames while designating the same
object. This allows to get user’s hints in all video
frames while reducing the user effort. We are taking
the general problem when deformable object,
moving in a non-constant environment and the
camera is also a moving camera. Section 2 describes
the curve propagation problem and the proposed
active curve modeling. Section 3 presents and
discusses the different forces we defined to govern
the propagation, dynamic weighting is introduced
and described in section 4. Experiments and results
are presented in section 5.
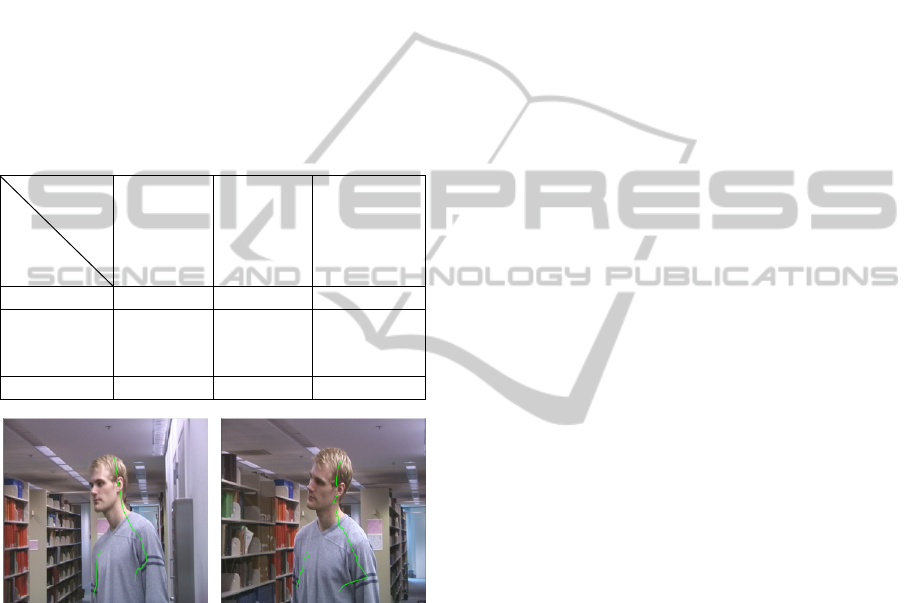
(a) (b)
Figure 2: (a)(b) Optical flow based propagation in frame
10 from ‘Amira sequence’ and in frame 5 from ‘walking
man sequence’. Errors are indicated by the green circles.
2 SCRIBBLES PROPAGATION
Our method aims at propagating scribbles drawn on
a video frame to the remainder of the sequence. For
this purpose we chose an active curve modeling.
First, we will explain the characteristics and the
problems of propagating a curve drawn manually by
the user to designate an object. Then, we will expose
the active curve method, its properties and, based on
it, how our problem is solved.
2.1 Curve Characteristics and
Propagation
What are the characteristics and the functionality of
the curve we want to propagate? This question is
implicit to the user who wants to select specific
regions to point out an object. What are the
properties enabling to propagate the curve while
preserving its functionality? This curve crosses
several regions that compose the selected object.
The curve is usually located at the middle portion of
these regions as shown in Figure 1. User’s drawing
is usually coarse; security leads him to stay away
from the object’s edges.
Propagating a hand drawn curve along the
different video frames consists in tracking a set of
points. Standard point based motion estimation
methods, such as (Baker and Matthews, 2004), do
not allow a correct propagation of the curve’s points
through a large number of video frames. Indeed, to
be correctly tracked, points must be illegible to
criteria that can be found in interest points. This is
the case of point of interest presented in (Shi and
Tomasi, 1994). Moreover, due to the initial curve’s
properties (the way and where the drawing is done),
tracking errors will be propagated and accumulated
progressively frame after frame. This will decrease
the tracking or the propagation quality. Point based
tracking is sensitive to texture similarity or aperture
problems.
In fact, the curve’s points are not geometrically
independent, as in some way they stay adjacent
points along the video. Processing points
independently can quickly become incoherent. We
suggest processing all the points as a whole, as a
curve, with a one dimension parameterization.
To point out the same object in next video
frames, the curve must stay in the selected regions
and must be located in the middle of these areas in
order to reduce the drift. It is dangerous to move
toward the crossed areas boundaries. In Figure 3,
is more representative than
. Whatever the applied
shifting
(video temporal coherence i.e. little
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
6

shifting) is less sensitive to get away from the
crossed region.
From these remarks, three constraints have been
identified, allowing the curve propagation, they are
stated as follows:
If the selected object moves, the curve has to
move accordingly to the movement of the different
regions of the object.
The characteristics of crossed regions must be
conserved; however, the evolution of these regions
must be taken into account as the environment may
change along the video.
In order to minimize errors, the curve has to
move and to converge towards the middle of each
region to give a good representation of the each one.
In our case, as the curve is manually drawn by the
user, no initial assumptions can be done on the curve
shape. As they are too global, some models like
Bezier curves or splines don’t seem flexible enough
to enable curve propagation, considering our
constraints. To perform a coherent propagation, we
define forces and the associated energy functional to
position the curve on the next frames. As several
forces are involved, a dynamic balancing scheme is
introduced to allow better sticking of the curve on
the image data. Estimating the position of the curves
in next frames is then done by an energy minimizing
process based on dynamic programing (Williams
and Shah, 1992). It is an active curve based
approach presented here.
3 CONSTRAINTS MODELLING
To ensure a coherent propagation of scribble’s
points and to make them evolve while designating
the same object -a set of heterogeneous areas-
through video frames, we define a set of energies:
internal and external energies. First, we model the
forces, associated with the curve itself and then with
image data, according to the defined constraints. In
term of energies modeling, the global energy is
composed from two terms: internal energies, related
to internal forces that manage the liberty given the
curve, and external energies, related to external
forces that manage the environment of the curve.
Internal forces are managing the intrinsic cohesion
of the curve, and external forces are ensuring data
attachment. Based on these forces we can define
corresponding energies we want to globally
minimize. Many elements may be considered such
as the curvature, motion, texture, etc. Let’s write the
global energy as the sum of an intrinsic energy and
an external one:
()=
() +
()
(1)
If the minimization has to be achieved in a global
way, the forces are acting locally and we will
present them when applied to each point.
Figure 3: Curve’s region representation: (C2) is less
affected by object movements; (C2) is more representative
to the region (r1) than (C1).
Let C be a curve discretized by N ordered points
p. The global energy of curve E(C) can be estimated
by:
Ê
(
)
=
() +
()
∈
(2)
with R={
,…,
}. The estimated solution
correspond to the set R of points such that E(R) is
minimum, that is to say rather more
complete (
,…,
) for which energy is minimal.
3.1 Internal Forces
Conventionally, the internal used forces are related
to the curve bending. They are: uniformity and
curvature forces. The uniformity force associated
with its energy functional
tries to maintain the
cohesion of curve’s points and therefore
standardizes the distances between each pair of
successive points. Notice
the average
distance separating two successive curve’s points
and
.
() =|
−
‖
‖
|
(3)
The curvature energy
influences the rigidity of
the curve. Let
, and
three successive
curve’s points. Let
the projection of
, on
the image’s x axe and
the projection of ,
on
the same axe. Let
and
the equivalent
respectively of
and
projection on the image’s
y axe.
()=
(
+
)
‖
,
‖‖
,
‖
+
(
+
)
‖
,
‖‖
,
‖
(4)
DYNAMIC WEIGHTING BASED ACTIVE CURVE PROPAGATION METHOD FOR VIDEO OBJECT SELECTION
7

On each point p, the internal energy can be written
as:
()=
() +
()
(5)
3.2 External Forces
The definition of external forces is more sensitive. It
is directly related to the nature of the problem. To
get a coherent tracking system, which selects the
same object in the successive frames, we decided to
model the constraints defined previously by three
forces:
One is related to the estimated motion of each
point,
Another is related to the local texture similarity,
The last one indicates a privileged direction for
propagation.
3.2.1 Motion
As no restriction has been expressed on the nature of
the object, the movement of an object may be
defined as the juxtaposition of different movements
from different parts of it. For instance, the
movement of the hand is not necessary the same as
the movement of the head of some one. So, locally
based motion estimation at each point is necessary
to ensure that the overall curve is committed to the
movement. Let ′
be the optical flow [4] estimated
image in frame t+1 of a curve’s point
from frame
t. To adjust the curve to the movement, we look for
p
t+1
among the points p in frame t+1 that have the
lowest possible Euclidean distance to point ′
. The
energy to minimize is given in frame t+1 by
formula:
(
)
=
|
|
(6)
3.2.2 Texture
Between frames at time t and t+1, the point must
remain in the same part of the object. The area may
be color uniform, but it also can be characterized by
a texture. Characterization of the texture would be
too time-consuming, so we chose to limit the study
to the average color in a neighborhood of each
curve’s point. To better model the temporal changes,
we chose CIE Lab color space. It is composed from
three components L, a and b. This color space allows
us to better distinguish between luminance (L) and
chromatic components (a and b) of color than in
RGB space. When we deal with video, contrast
change artifact is very common, so luminance is less
discriminant than chromatic components. One
curve’s point
will then evolve to a new position
with a similar color while including some tolerance
to illumination change. Then we define color
similarity energy using a weighted Euclidean
distance in the Lab space, where less importance is
given to the luminance than to the chrominance. The
average color at point p is denoted cm. The average
is computed in the neighborhood according the
segment described in the section. Three components:
cm(a), cm(b) and cm(l). Then the energy formula is:
(
)
=
(
)
−
(
)
+
(
)
−
(
)
+
1
4
(
)
−
(
)
(7)
The ¼ coefficient has been empirically set and is
used in all the experiments we present.
3.2.3 Stability
The last energy comes from the fact that the user
tends to draw scribbles while trying to stay well
within the middle zones of the different object’s
regions (which prevents him from getting out of the
object). The curve must also reproduce this effect.
This will make the system more stable. To answer
this third constraint, we first detect the locally
homogeneous region around the curve, depending on
the color of each of its points. The curve is extended
to a confidence region R. The extension is computed
from the set of
points. From each
the extension
is computed in an orthogonal direction to the curve,
using a region growing process. Each point is
extended as a segment, denoted
. R is so defined as
the convex hull of all S
(Figure 4). The region
growing is based on color similarity. To calculate
this energy, we estimate the normal to the curve at
each point
at the time t, and calculate a similarity
line segment S
. This segment associated with
is
the maximum segment of uniform color. That is to
say, all its points’ colors are similar to the
color.
The maximum concerns the length of the segment.
No larger segment can be found with respect to
color. The extremities of this segment are the limit
tolerance points.
denotes the extremity which is
farthest from
. This models the direction in which
the curve is the farther from the region contour.
Our goal, starting from the state of a point on the
curve at time t, is to privilege the propagation
towards the middle of the region. This energy will
push points to an area of greater homogeneity, as
shown in Figure 5. To prevent curve’s displacement
from motion estimation errors and introduce more
coherence and stability to our system, we look for
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
8

p
t+1
among all possible position p in frame t+1 that
have the lowest possible Euclidean distance to point
′
which is the optical flow image of
, the point
for each point
represents the limit of the
similarity region R. The stability energy to minimize
is given in by the following formula:
()=
‖
′
‖
(8)
The external energy is composed from three
weighted terms, and then we can finally write the
global energy as:
(
)
=
() +
() +
(
)
+
(
)
+
()
∈
(9)
(a) (b)
Figure 4: (a) Similarity line segment drawn on each point
of the curve. (b) Zoomed view of (a).
Figure 5: Stability force representation; the curve is
pushed toward the middle of homogenous regions.
4 DYNAMIC WEIGHTING
MECHANISM
One of the major problems in using active curves
methods is how to tune the energies’ related weights.
There is no defined method to set them. Using
different sets of weights, ones can get similar results.
Usually, the weights are set from prior information
or empirical estimations as in (Kass et al., 1987). In
more recent studies (Etyngier et al., 2007), learning
based approaches are used to adapt more robustly
the weights to a pre-defined problem. Such an
approach cannot be applied in our case due to the
interactive nature of our application and the variety
of object we want to handle. Moreover, we noted
that even if one force has more importance than the
others, this is not true all the time and for all points’
position, so it could lead us to errors in later
processed frames.
As shown above, the curve drawn, by the user,
can cross many different high textured regions. A
global parameterization is, so, not adapted in our
case due to the lack of priors. In contrast of the
active curve based previous works (Kass et al.,
1987) or (Lefevre and Vincent, 2004), we introduce
a dynamic weighting scheme based on the following
observations: in the cases of points in regions
containing many high gradient, one point can be
easily tracked based on classical motion estimation
methods with higher robustness. In the other cases
motion estimator seems to be very errors prone and
it would be better to give more importance to the
others data terms. According to the position of the
curve’s point, for external forces, we want to
dynamically change the weights to match the nature
of the image, thus the area in which the point
belongs to.
In the previous section, the global energy was
formulated as fellow:
()=
()
(10)
While we consider dynamic weighting scheme, we
can rewrite the global energy as follows:
(
)
=
()
() +
()
() +
(
)
(
)
+
(
)
(
)
+
()
()
∈
(11)
We consider that the weight associated with each
energy is related to the point characterization. To
describe the area around the point, we have chosen
the similarity segment S
(described above) at each
point of the curve. We may act individually on each
point. Thus we can say, for example, the shorter the
segment S
is, the higher is the probability that the
point is a contour point. Therefore we give more
confidence (and thus more weight) to the estimated
motion and so to
by increasing
proportionally to the length of
denoted
. In the
other case we want to increase the stability force
effect. In practice, the lengths of all similarity
segments Ls
are normalized by the maximum length
then we can write:
=
(
).
(12)
DYNAMIC WEIGHTING BASED ACTIVE CURVE PROPAGATION METHOD FOR VIDEO OBJECT SELECTION
9

The global energy has to be rewritten according to
this following formula:
(
)
=
()
()+
()
() +
(
1−
)
(
)
(
)
+
(
)
(
)
+
()
()
∈
(13)
5 EXPERIMENTS AND RESULTS
Our system proposes a graphical user interface
allowing user to draw one or many scribbles at any
frame of a video to point out an object. Our
algorithm is designed to handle dynamic
backgrounds, as it is the case in Figure 6 and 8
sequences. There are two modes: an interactive
mode allowing the user to designate the object of
interest and an automatic mode where the scribbles
are propagated automatically in a real time
processing. Therefore user can interact at any time to
point out a new region which was not visible at the
beginning of the video Figure 8. Our final results are
best seen in video form, though we show several still
images for example in this section.
(a) (b)
(c) (d)
Figure 6: (a) Three scribbles drawn at frame 1 by the user
to designate the women in the video. (b)(c)(d) The
respective results of propagating scribbles from frame ‘a’
to frames 8, 23 and 30.
We tested our approach on three standard video
sequences (640x480x30) from the literature (Bai et
al., 2009) and (Wang and Cohen, 2005) (Figure 6, 7,
8). It is difficult to objectively measure a success of
systems like our presented one. One possible
approach is based on the number of frames in which
the initial designated object continues to be pointed
out by our algorithm. This information is got from
the final user. To compare our method, we
implement an optical flow based scribbles
propagator, denoted OFBP. Figure 6a, 7a show two
examples of scribbles drawn by user. We try to
propagate these user’s hints automatically to
designate the object initially pointed by the user on
the next video frames these scribbles can be used as
input to (Levin et al., 2008) matting method applied
frame by frame to extract to whole video object.
OFBP approach fails even on basic cases as shown
on Figure 2. Our results are shown on Figures (6, 7,
8) and compared to OFBP implementation in Table
1. We evaluate the improvement of the dynamic
weighting mechanism. In the case of Amira
sequence, the gain is 20%. In the Walking man
sequence the gain is around 37%.
(a) (b)
(c) (d)
Figure 7: (a) The user points out the man by drawing two
scribbles on the first video frame of walking man
sequence. (b)(c)(d) The respective results of propagating
the scribbles from frame (a) to frames 7, 14 and 25.
6 CONLUSIONS
In this paper, we showed a new approach for hand
drawn curve propagation. It consists in using active
curves model to formulate the problem of video
object selection. In addition a new dynamic
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
10
weighting scheme has been introduced to let the
curve stick better to the image data. Our framework
allows user driven designation of objects in videos.
Our contributions consist in the formulation of
scribbles propagation as an active curve model and
the definition of the different related energies
functional combined with dynamic weights
management in order to obtain a more accurate
video tracking. Our algorithm can be further
improved by adding features such as texture or by
using a more recent and accurate optical flow
estimator. We are currently focusing on this
improvement and studying the potential of our
approach in two fields: video matting and human
actions classification.
Table 1: The number of frames in which the initial
selected object is still designated.
Video
Method
Amira
(30 frames)
Adam Lib
(29 frames)
Walking man
(30 frames)
OFBP
11 26 5
our method
without dynamic
weights
24 29 14
our method
30 29 25
Figure 8: (a) The user adds a new scribble to point out a
new region which was not visible in the beginning of the
“Adam lib” sequence. (b) The propagation continue on
based these two scribbles as shown in frame 29 (b).
REFERENCES
Bai, X. and Sapiro, G., 2007. A geodesic framework for
fast interactive image and video segmentation and
matting. In Proc.of IEEE ICCV.
Bai, X., Wang, J. Simons, D. and Sapiro, G., 2009.Video
snapcut: Robust video object cutout using localized
classifiers. In SIGGRAPH 2009, New York, NY, USA,
ACM.
Baker, S. and Matthews, I., 2004. Lucas-Kanade 20 years
on: A unifying framework. IJCV, 56(3):221–255.
Boykov, Y., Veksler, O., and Zabih, R. 2001. Fast
approximate energy minimization via graph cuts.
IEEE Trans. Pattern Analysis and Machine
Intelligence 23, 11, 1222–1239.
Chuang, Y.-Y., Curless, B., Salesin, D. H., and Szeliski,
R., 2001. “A bayesian approach to digital matting,” in
Proceedings of IEEE CVPR, pp. 264–271.
Etyngier, P., Segonne, F., and Keriven, R., 2007. Active
contour based image segmentation using machine
learning techniques. in MICCAI, ser. Lecture Notes in
Computer Science, vol. 4791. Springer, pp.891–899.
Joshi, N., Matusik, W., and Avidan, S., 2006. “Natural
video matting using camera arrays,” in Proc. of ACM
SIGGRAPH, pp. 779–786, 2006.
Kass, M. Witkin, A. and Terzopoulos, D. 1987. Snakes:
Active contour models. IJCV, 1(4):321–331.
Lefevre, S. and Vincent, N., 2004. Real time multiple
object tracking based on active contours. In
International Conference on Image Analysis and
Recognition, volume 3212 of Lecture Notes in
Computer Sciences, Springer, pages 606–613.
Levin, A., Lischinski, D. and Weiss, Y., 2008. A closed-
form solution to natural image matting. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 30(2):228–242.
McGuire, M., Matusik, W., Pfister, W., Hughes, J. F. and
Durand, F., 2005, “Defocus video matting,” in
Proceedings of ACM SIGGRAPH, pp. 567–576.
Shi, J., Tomasi, C., 1994. Good features to track.
Proceedings of the IEEE CVPR. p. 593–600.
Wang J., Bhat, P., Colburn, R. A., Agrawala, M., Cohen,
M., 2005. Interactive video cutout. SIGGRAPH’05,
24(3):585–594.
Wang, J. and Cohen, M., 2005. “An iterative optimization
approach for unified image segmentation and
matting,” in Proceedings of ICCV, pp. 936–943.
Wang, J. and Cohen, M., 2007. Image and video matting:
A survey. Foundations and Trends. In Computer
Graphics and Vision 3, 2, 97–175.
Williams, D. J. and Shah. M., 1992 A Fast Algorithm for
Active Contours and Curvature Estimation, VIGP
Computer Vision Graphics Image Process Image
Understanding, vol. 55, n° 1, p. 14-26.
DYNAMIC WEIGHTING BASED ACTIVE CURVE PROPAGATION METHOD FOR VIDEO OBJECT SELECTION
11
