
A FORMAL METHOD FOR SCHEDULING ANALYSIS
OF A PARTITIONED MULTIPROCESSOR SYSTEM
Dynamic Priority Time Petri Nets
Walid Karamti, Adel Mahfoudhi, Yessine Hadj Kacem and Mohamed Abid
CES Laboratory, ENIS Soukra km 3,5, University of Sfax, B.P.:w 1173-3000 Sfax, Tunisia
Keywords:
Real-time System, Petri Nets, dPTPN, Scheduling Analysis, Least Laxity First.
Abstract:
In order to examine whether the timing constraints of a Real-Time application are met, we propose an ex-
tension of Time Petri Nets model that takes into account the scheduling of a set of tasks distributed over a
multiprocessor architecture. This paper is concerned with dynamic Priority-driven scheduling, whose policy
is known to be supported by a new formalism called dynamic Priority Time Petri Nets (dPTPN). Its ultimate
objective is to show how to deal with the Least Laxity First Scheduling policy with a set of periodic inde-
pendent tasks. Besides, the use of dynamic priorities gives a determinism aspect to the model in which a
crossing of concurrent transitions exists. Therefore, the execution of the model is accelerated and the number
of accessible states is decreased.
1 INTRODUCTION
Real-time systems (RTS) are characterized by com-
plex applications that require powerful architectures
to satisfy them. The trend is to use multiprocessor
architectures, among which we can distinguish the
presence of two families of multiprocessor schedul-
ing. The first is the family of global scheduling in
which each task of application can migrate among the
processor resources to be executed. The major draw-
back of the global family is the absence of an optimal
scheduling algorithm (Kwang and Leung, 1988). The
second family is the partitioned scheduling, in which
one task of the application can be executed on a sin-
gle processor resource. It is to bring the multipro-
cessor scheduling problem in uniprocessor schedul-
ing problems in which there exist optimal scheduling
algorithms (Liu and Layland, 1973). The family of
partitioned scheduling involves two steps; a step of
assigning tasks to processors, and another for analyz-
ing the scheduling of each partition (Sha et al., 2004).
It is important to detect errors of scheduling as early
as possible in order to minimize the costs for its cor-
rection. The analytical techniques used are based on
the analytical work of Liu and Layland (Liu and Lay-
land, 1973).
The specification with formal methods could be
able to reduce the problem impact. In fact, it repre-
sents a recent research area in order to develop a con-
sistent approach. Starting from an abstract modeling
that takes into account a set of constraints, the main
objective of this technique is to determine and check
the system properties.
Many varieties of formal methods exist and the
choice of the appropriate one depends on the char-
acteristics of the system and the properties to be
checked. Deductive reasoning and model checking
are two major categories of proving methods. Using
the deductivemethod, a specification gives an abstract
description of the significant behavior of the required
system. This behavior is checked for the defined im-
plementation through the proving of theorems which
constitute the rules of refinement. The major limita-
tion of this category is that the user interacting with
the prover must be able to guide him.
1.1 Related Work
The technique of model checking is of an irrefutable
advantage, allowing early and economical detection
of errors at an early stage of the design process. This
explains the growing popularity it enjoys in the indus-
trial world.
Aiming at developing a system model, designers
must ensure a sufficient accuracy to preserve all the
properties for check and a level of abstraction ap-
propriate not to penalize the analysis phase. There
are many formalisms proposed for modeling real-time
317
Karamti W., Mahfoudhi A., Hadj Kacem Y. and Abid M..
A FORMAL METHOD FOR SCHEDULING ANALYSIS OF A PARTITIONED MULTIPROCESSOR SYSTEM - Dynamic Priority Time Petri Nets.
DOI: 10.5220/0003809103170326
In Proceedings of the 2nd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2012), pages 317-326
ISBN: 978-989-8565-00-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

systems. Each one has its specific characteristics,
more or less relevant in a specific design and accord-
ing to the type of analysis considered.
Time, parallel processing and synchronization
are primordial characteristics for scheduling analy-
sis. Compared with other formalisms, the Time
Petri Nets (TPNs) (Merlin, 1974) can easily support
these features without leading to combinatorial ex-
plosion. Therefore, TPNs face problems when mod-
eling a scheduling policy. Indeed, TPNs is a non-
deterministic formalism because when two or more
transitions are enabled it is not specified which one
has to fire. In reverse, the scheduling algorithm al-
ways chooses an event from the available ones ac-
cording to a defined policy. Several extensions have
been created to support scheduling policy by adding
priorities to transitions.
It should be born in mind that the absence of a
TPNs extension supports dynamic priorities. That is
why we detail the extensions with static priority used
for scheduling analysis.
Roux (Roux and D´eplanche, 2002) presented an
STPN (Scheduling Timed Petri Nets) to analyze peri-
odic tasks on a multiprocessor architecture. The pri-
orities were introduced by the inhibitor arcs to sup-
port a fixed priority driven scheduling policy such
as RM (Rate Monotonic) (Liu and Layland, 1973).
The contribution of his proposal lies in the calcula-
tion of a reduced state space compared to that evoked
by (Berthomieu and Diaz, 1991). Such proposal was
improved by (Lime and Roux, 2004) and (Lime and
Roux, 2009) to support the tasks with variable time
execution.
The STPN (Roux and D´eplanche, 2002) adds con-
straints on the crossing of the transitions to check the
respect for the firing interval. Therefore, the check
of these constraints is a new dimension added to the
problem of scheduling analysis.
Berthomieu (Berthomieu et al., 2006)in his turn
utilized the inhibitor arcs to introduce the notion of
priorities within the Petri nets through the extension
of PrTPNs (Priority Time Petri Nets). His proposal
was based on a method of temporal analysis of the
network. Indeed, from a sequence of non-temporal
transitions, his method was to recover the possible du-
rations between the firing of transitions in order. The
durations are the solutions of a linear programming
problem.
Both of PrTPN and STPN are TPNs extensions, so
they retain these properties, i.e., the indeterminacy of
the date of crossing of an event. However the model-
ing of a scheduling policy of a hard real-time system
requires that all dates used are determined. The pri-
ority is modeled through the inhibitors arcs added as
new components to those of PNs. The RTS modeling
with Petri nets gives rise to the models that are often
complex. Moreover, the addition of an inhibitor arc
makes the model more complex and therefore the ex-
traction of properties becomes more difficult.
A new extension PTPN (Priority Time Petri Nets) was
proposed in (Kacem et al., 2010), in which a crossing
date is associated with each temporal event. In fact,
a transition is valid when the clock shows the date
of firing. In addition, PTPN uses a new method of
priorities integration to address the problem of tran-
sitions conflict. In this method, a priority is inserted
on the input arcs of the dependent transitions (Kacem
et al., 2010).Moreover, this method allows to mas-
ter the complexity of the PTPN model by eliminat-
ing the use of another component, such as inhibitor
arcs, to specify priorities. To control the size of the
PTPN model, a hierarchical modeling was proposed
in (Mahfoudhi et al., 2011).
1.2 Contribution and Outline of the
Paper
Most of the Time Petri Nets extensions dedicated for
scheduling analysis such as PrTPN (Berthomieu et al.,
2006), STPN (Roux and D´eplanche, 2002) and PTPN
(Kacem et al., 2010) use a fixed priority. However,
the use of a fixed priority allows the covering of a re-
duced space of RTS such as periodic tasks and fixed
Priority-driven scheduling strategies.
On a single processor platform, the LLF (Least
Laxity First) scheduling policy, a dynamic Priority-
driven scheduling, is known as the most general algo-
rithm on RTS. It is proven as an optimal preemptive
scheduling algorithm (Goossens et al., 2004). How-
ever, its features upon multiprocessor platforms have
been little studied so far.
In this paper, we account for the scheduling anal-
ysis of multiprocessor system via a new extension of
Time Petri Nets. The major advantageof the proposed
extension is that it gives a solution to the modeling
and analysis of a dynamic priority-driven scheduling
policy (LLF) taking into account periodic indepen-
dent system tasks partitioned over a multiprocessor
platforms.
The present paper is organized as follows. Firstly,
the definitions and execution semantics of the pro-
posed dynamic Priority Petri Nets (dPTPN) are
overviewed in section 2. Next, section 3 shows how
our extended formalism is used for specifying the
scheduling analysis problem through experiments. Fi-
nally, the proposed approach is briefly outlined and
future perspectives are given.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
318

2 DYNAMIC PRIORITY TIME
PETRI NETS: dPTPN
Our challenge is the integration of a dynamic-Priority
driven scheduling policy in Petri Nets. This strategy
is based on the dynamic calculation of priorities. In-
deed, the value of a priority changes at runtime.
In the standard PN, the events (transitions) had the
same grade of emergency. Thus when transitions con-
flict, there are no favorable transition to cross before
the others. Accordingly, the semantics of the standard
PN does not support a scheduling policy.
A real-time scheduling policy is characterized by
a sequence of timed events and no events conflict. To
reach our goal, we will integrate these two features in
PN. To do so, we distinguish between temporal events
and concurrent events that are sources of conflict. We
propose a new extension of PN with two types of tran-
sitions T (temporal transitions) and T
cp
(compound
transition Fig. 1).
Figure 1: T
cp
compound.
The latter is all about a transition with a prepro-
cessing that precedes the crossing to calculate its pri-
ority. Indeed, if two Tcp transitions are enabled and
share at least a place in entry then the preprocessing is
made to determine the transition which will be fired,
with a priority changing according to the state of the
network described by the marking M. By analogy in
real-time scheduling with dynamic priorities such as
LLF, the priority changes according to laxity.
In this section, we present the syntax of the
new Petri Net extension (dynamic priority Petri Nets
dPTPN) as well as its firing semantics. The simula-
tion of the sequences of firing is then explained.
2.1 Syntax
A Petri Nets (Petri, 1962) can be defined as 4-uplet :
PN = hP, T, B, Fi (1)
, where:
(1) P = {p
1
, p
2
, ..., p
n
} is a finite set of places n > 0;
(2) T = {t
1
, t
2
, ..., t
m
} is a finite set of transition m > 0
(3) B : (P× T) 7→ N is the backward incidence func-
tion;
(4) F : (P × T) 7→ N is the forward incidence func-
tion;
Each system state is represented by a marking M of
the net and defined by : M : P 7→ N.
The dPTPN is defined by the 7-uplet :
dPTPN =
PN,T
cp
,T
f
,B
T
cp
,F
T
cp
,coef, M
0
(2)
(1) PN: is a Petri Net;
(2) T
cp
=
T
cp
1
,T
cp
2
,··· ,T
cp
k
: is a finite set of com-
pound transition k > 0;
(3) T
f
: T 7→ Q
+
is the firing time of a transition.
∀t ∈ T, t is a temporal transition ⇐⇒ T
f
(t) 6= 0.If
T
f
(t) = 0 then t is an immediate transition. Each
temporal transition t is coupled with a local clock
(Hl(t)),with Hl : T −→ Q
+
.
(4) B
T
cp
: (P × T
cp
) 7→ N is the backward incidence
function associated with compound transition;
(5) F
T
cp
: (P × T
cp
) 7→ N is the forward incidence
function associated with compound transition;
(6) coe f : (P× T
cp
) 7→ Z is the coefficient function
associated with compound transition;
(7) M
0
: is the initial marking;
2.2 Semantics
To deal with the problem of the state space explo-
sion, it is worthwhile to mention the contribution of
the methods considered as partial order (Antti, 1989)
(Kimmo, 1994) (Buy and Sloan, 1994) building on a
relation of equivalence between various sequences of
possible firings, starting from the same state. In fact,
when two sequences are found to be equivalent, then
only one of them is selected. This relation of equiva-
lence is based on the notion of independence of tran-
sitions. Two transitions are independent if they are
not in the same neighborhood (see eq. 9).
Based on the approach of partial order and the T
cp
compound, dPTPN relies on a well-defined strategy
for the firing during a conflict of transitions. The strat-
egy builds on the construction of a sequence of the
highest priority and valid transitions dFT
s
. For the fir-
ing of a marking M, dPTPN offersa machine of firing
called dPTPN Firing Machine dPFM, whose mecha-
nism is described in Fig. 2. The entry of the machine
dPFM is a marking M of the dPTPN network. For
each entry, the machine builds the dFT
s
set, which
consists of two sub-sets FT
s
and FT
s
T
cp
, which in turn
present the firing transitions of T and those of T
cp
, re-
spectively. When it is about a marking dead-end, the
dFT
s
set is empty (FT
s
is empty and FT
s
T
cp
is empty)
and the dPFM machine stops.
The modeling of an RTS with dPTPN distin-
guishes between the temporal and immediate events.
To do so, the machine dPFM supplies a chain of pro-
cessing. Indeed, the machine, firstly, determines the
valid temporal transitions set VT
s
from the FT
s
set,
A FORMAL METHOD FOR SCHEDULING ANALYSIS OF A PARTITIONED MULTIPROCESSOR SYSTEM -
Dynamic Priority Time Petri Nets
319
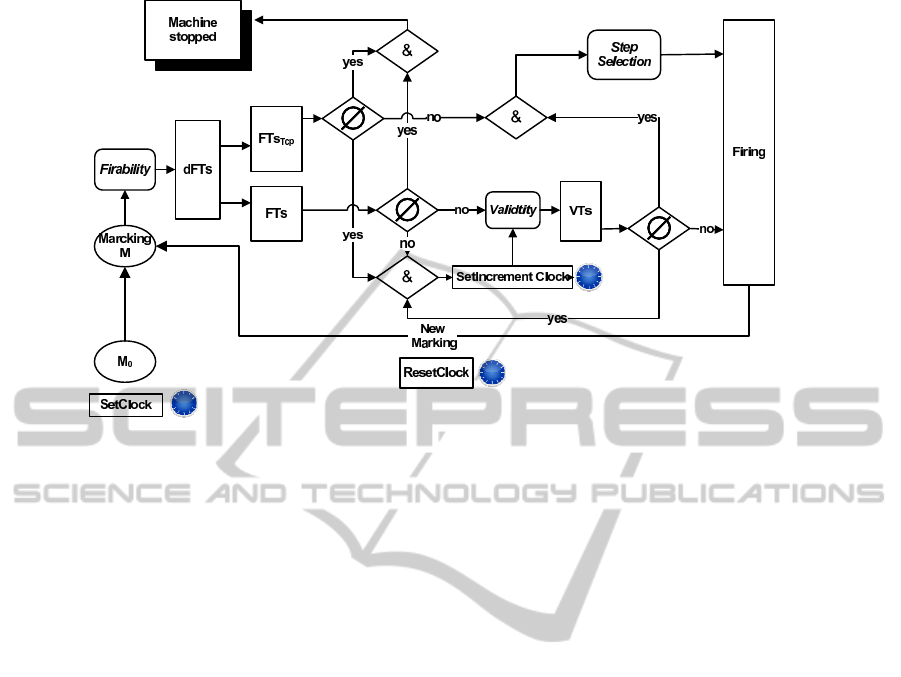
Figure 2: dPTPN firing machine.
and secondly, the VT
s
is analyzed. The machine fires
any valid transition before passing to the following
stage and for each firing the dFT
s
is reconstructed
(FT
s
and FT
s
T
cp
, respectively). The last stage con-
sists in solving the problem of conflict by choosing
among the compound transitions with the highest pri-
ority that will be fired.
All immediate transitions must be crossed before
the analysis of FT
s
T
cp
. In fact, the immediate transi-
tions are more urgent and their firing can give birth to
a marking that presents a new conflict of transitions.
2.2.1 Firability
dFT
s
presents the enabled transitions set. In fact,
dFT
s
is the union of the enabled temporal transi-
tions set FT
s
and the enabled compound transitions
set FT
s
T
cp
.
dFT
s
= FT
s
∪ FT
s
T
cp
. (3)
let t ∈ T,t ∈ dFT
s
⇔ t ∈ FT
s
∨t ∈ FT
s
T
cp
(4)
with
FT
s
= {t ∈ T/B( . ,t) ≤ M}
FT
s
T
cp
=
t ∈ T/B
T
cp
( . ,t) ≤ M
For each subset FT
s
and FT
s
T
cp
is associated with a
function indicator χ
FT
s
and χ
FT
s
T
cp
.
χ
FT
s
: T −→ {0,1} (5)
x 7−→
1 if x ∈ FT
s
0 otherwise
χ
FT
s
T
cp
: T −→ {0,1} (6)
x 7−→
1 if x ∈ FT
s
T
cp
0 otherwise
2.2.2 Validity
A transition is valid if it is enabled and respects its
firing date. We should bear in mind that T
cp
is an
immediate transition. Therefore, we define the Valid
Transition Set (VT
s
) as a subset of FT
s
(VT
s
⊆ FT
s
).
VT
s
=
t ∈ FT
s
/Hl(t) = T
f
(t)
(7)
χ
VT
s
is the function indicator of VT
s
with:
χ
VT
s
: FT
s
−→ {0,1} (8)
The main advantage of utilization of the T
cp
compo-
nent is to solve the problem of transition conflict. The
best way is to select the T
cp
transition having the high-
est priority.
2.2.3 Step Selection
∀T
cp
i
∈ T
cp
, T
cp
i
is selected if and only if it is enabled
and has the highest priority compared with its neigh-
borhood. First of all we present the neighborhood of
transition T
cp
i
:
∀T
cp
1
,T
cp
2
∈ T
cp
,T
cp
1
is a neighbor o f T
cp
2
⇔ ∃p ∈ P such that B
T
cp
p,T
cp
1
6= 0∧ B
T
cp
p,T
cp
2
6= 0
(9)
We consider a matrix N
e
to indicate the neighborhood
of all transitions T
cp
compared to each place P:
N
e
: T
cp
× P −→ {0,1} (10)
(t
cp
, p) 7−→
1 if B
T
cp
(p,t
cp
) > 0
0 otherwise
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
320

Three steps are applied to select the transition that
has the highest priority. The first step is the calcula-
tion of the priority for each enabled transition T
cp
. In
fact, the priority depends on the state of the dPTPN
model and the matrix coef. Each T
cp
calculate its pri-
ority using the scalar product of coef matrix with the
marking vector M.
Prio : FT
s
T
cp
−→ Z (11)
t
cp
7−→ hcoef (.,t
cp
)| Mi
In the second step, we mark the corresponding pri-
orities to each T
cp
neighborhood. More precisely we
define the following function:
Prod : FT
sT
cp
× P 7→ Z (12)
(t
cp
, p) 7−→ Prio(t
cp
)N
e
(t
cp
, p)
the third step, the transition having the highest priority
per palce is selected from the vector Prod(., p
i
).
Min : P −→ FT
s
T
cp
(13)
p 7−→ t
cp
with {∀t
cp
i
6= t
cp
, Prod (t
cp
, p) < Prod(t
cp
i
, p)}
Finally, the FT
s
T
cp
must be updated to present only the
selected transitions: ∀t
cp
∈ T
cp
,∀p ∈ P,
Prod(t
cp
, p) 6= 0∧ t
cp
6= Min(p) =⇒ χ
FT
s
T
cp
(t
cp
) = 0
(14)
2.2.4 Firing
We define the firing of a given FT vector. In dPTPN,
FT can be an VT
s
vector or an FT
s
T
cp
vector:
∀FT ∈
n
VT
s
,FT
s
T
cp
o
,Firing(FT) =⇒
FT = VT
s
⇔ M
′
= M +
∑
t∈FT
(F (.,t) − B(.,t))
FT = FT
s
T
cp
⇔ M
′
= M +
∑
t∈FT
F
T
cp
(.,t) − B
T
cp
(.,t)
(15)
2.2.5 Clocks Management
According to dPTPN, the clocks management abides
some rules, which are:
Rule1 (Set): When a transition is enabled, for its first
time, then its matching clock is activated and initial-
ized with zero.
Rule2 (Reset): After firing VT
s
, the clocks of valid
transitions will reset.
Rule3 (Increment Clock): The clock of a transition
is incrementing if the transition is enabled, no valid
transition exists and the FT
s
T
cp
is empty.
SetIncremetClock() is activated ⇐⇒
FT
s
6= ⊘ ∧ FT
s
T
cp
= ⊘ ∧VT
s
= ⊘ (16)
2.2.6 dPTPN State Graph
In dPTPN, a state is a node composed of (M,tmp),
where M is a marking andtmp is the time for its firing.
The state graph SG is defined by: SG = hS, Ai with:
• S: is a set of state;
• A : S × S −→ dFT
s
: presents the arcs connecting
the reachable states. The connection arcs will be
established only when two markings of two states
are reachable via dFT
s
vector.
The process of construction of the states graph cor-
responds to the execution of the Algorithm 1. In-
deed, it deals with a repetitive execution of the dPFM
machine and for every iteration a new state is con-
structed.
During the first tic of the clock associated with
Algorithm 1: State graph construction.
1: M: Marking
2: dFT
s
: enabled transitions set
3: FT
s
: enabled temporal transitions set
4: VT
s
: valid temporal transitions set
5: Hl: clocks set
6: FT
s
T
cp
: enabled compound transitions set
7: initializeMarking(M)
8: SetClock(Hl)
9: StateConstruction(M)
10: while M ≺ B and M ≺ B
T
cp
do
11: Firability(dFT
s
)
12: FT
s
← temporalTransition(dFT
s
)
13: FT
s
T
cp
← CompoundTransition(dFT
s
)
14: if FT
s
6= ⊘ then
15: VT
s
← Validity(FT
s
)
16: if VT
s
6= ⊘ then
17: Firing(VT
s
)
18: StateConstruction(M)
19: ResetClock(Hl(VT
s
))
20: else if FT
s
T
cp
= ⊘ then
21: SetIncrementClock(Hl(FT
s
))
22: end if
23: else if FT
s
T
cp
6= ⊘ then
24: StepSelection(FT
s
T
cp
)
25: Firing(dFT
s
)
26: StateConstruction(M)
27: end if
28: end while
dPTPN, the marking M is initialized by the initialize-
Marking(M) function and the first state is built by the
function
StateConstruction(M)
. The process of con-
struction starts with applying an iterative work. For
each iteration, the machine dPFM begins with the de-
termination of the fired transitions in the vector dFT
s
by applying the function Firability(dFT
s
). Vectors
FT
s
and FT
s
T
cp
are initialized from dFT
s
to distin-
guish between the temporal transitions and the T
cp
A FORMAL METHOD FOR SCHEDULING ANALYSIS OF A PARTITIONED MULTIPROCESSOR SYSTEM -
Dynamic Priority Time Petri Nets
321

transitions.
The validation of the temporal transitions is an-
alyzed via the function Validity(FT
s
). To check the
existence of the valid transitions, a conditional struc-
ture appears to fire them at once. However, the ab-
sence of the valid transitions allows us to check the
existence of the compound transitions. The presence
of the transitions in FT
s
T
cp
requires a selection of the
highest priority to fire it. Any firing leads to an update
of the marking M and a construction of a new state to
connect it with the precedent one through a weight arc
dFT
s
.
The absence of the valid transitions and the com-
pound transitions leads to an incrementation of the
global clock of the dPTPN by calling the function
SetIncrementClock(). This process is repeated as long
as the marking M satisfies at least a transition. The
Process ends as soon as it is in a marking dead-end or
during a reset of the marking.
3 MODEL CONSTRUCTION
The RTS Ω is defined by the 3-uplet:
Ω = hTask, Proc, Alloci (17)
with:
(1) Task : is a finite set of real-time tasks with each
Task
i
∈ Task determined by
Task
i
= hR
i
, P
i
, D
i
, C
i
i (18)
• R
i
: the date of the first activation.
• P
i
: the period associated with the task.
• D
i
: the deadline associated with the task, we con-
sider an RTS with P
i
= D
i
.
• C
i
: the execution period of the task for the P
i
pe-
riod.
(2) Proc : a finite set of processors.
(3) Alloc : Task 7→ Proc, a function which allocates a
task to a processor. Alloc is a surjective function. In
fact a processor is allocated to at least one task. But a
task must be assigned to only one processor.
∀t
1
∈ Task, ∀P
1
,P
2
∈ Proc,
Alloc(t
1
) = P
1
∧ Alloc(t
1
) = P
2
⇒ P
1
= P
2
(19)
To model the system Ω with the new dPTPN exten-
sion, we specify each component of Ω. The model of
scheduling analysis is described through the commu-
nication between the various Task and Proc compo-
nents. Each processor is modelled by a simple place,
whose marking describes the state of the resource.
The presence of a mark indicates that the resource is
free and ready to execute a task. The absence of the
mark indicates that the resource is occupied by a sys-
tem task Ω.
3.1 Task Model
The modeling can be divided into two major patterns.
The first one pertains to the notion of creation, activa-
tion and deadline, as for the second, it describes the
concept of execution task.
3.1.1 Creation, Activation and Deadline
At first, a task Task
i
∈ Task is created. For a date
”Ri”, the creation is made, leading to the passage of
the task towards the created state. So, the period ”Pi”
starts. As shown in Fig. 3, each state is modelled by
a place and every event by a transition. When it is
about an event accompanied with a date of progress,
the transition will take a date of firing similar to that
of the event. When it is about a non-created state, it is
presented by a marked place (UnCreated). The cre-
ation is modelled by a temporal transition Creation
which takes a date of ”Ri” firing.
When the local clock of Hl(Creation) indicates
the date of firing R
i
, the transition is then valid
and the firing allows to register a mark in the place
Created and P
i
tokens in RemainingPeriod. Indeed,
the marking of the place Created shows that the
task is created and P
i
marks present the remaining
duration before the deadline. For each tic of the
global clock of the dPTPN, the transition IncPeriod
is validated. Besides, its firing leads to a decre-
mentation of the remaining duration before the dead-
line and an incrementation of the exhausted time of
the period. When Pi tokens are moved towards the
place ElapsedPeriod, the period is exhausted and a
new period must be activated. The event of activa-
tion is modelled by a transition Restart, whose fir-
ing activates a new period by depositing P
i
marks
in RemainingPeriod and the creation of a new in-
stance of the task by putting down a token in the place
Created.
Figure 3: Creation, activation and deadline.
We present a first scenario in which the first acti-
vation of the task Task
i
exists. We will then introduce
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
322

a scenario of deadline event provided with the mech-
anism of its detection by the model dPTPN.
The place Created indicates the presence of a
mark. To model the activation of the first instance
of the task, we use a mutual exclusion described by
two places Disabled and Activated. According to
the initial scenario, the first instance of the task is
deactivated, where from the presence of a token in
Disabled. The current marking allows the firing of
the transition Activation and the firing allows the sup-
ply of a mark in places Ready and Activated. The cur-
rent state proves that the current instance of the task
is activated and lends itself to be run on the processor
resource.
With regard to the second scenario, it describes
the activation of a new period while the old instance
of the task has not finished its execution yet. The
model presents a mark in the place Created and an-
other in the place Activated. This marking allows the
firing of the transition Activation for the activation of
the new instance and the transition Tdeadline to in-
dicate that the task overtook its deadline. The firing
of Tdeadline allows the registration of a mark in the
place Deadline and the blocking of the entire model
dPTPN of the task.
3.1.2 Execution
The execution of a task is described by two main
events, the first of which pertains to the allocation of
the resource processor and the second represents the
execution of the task on the processor.
The resource processor is a resource shared be-
tween the various tasks of the same partition, and for
a given moment, a single task occupies it. The alloca-
tion of the processor depends on the used scheduling
strategy. In our study we are interested in the strategy
based on LLF.
With dPTPN, each task calls for the resource pro-
cessor if and only if it presents a mark in the place
Ready. So, the event of allocation is modeled by
a transition allocation of the type T
cp
. The proces-
sor will be attributed to the task having the transition
allocation with the highest priority (having the least
laxity). Indeed, the allocation is modeled by a regis-
tration of a mark in the place getProc. Fig. 4 illus-
trates two requests of allocation of the processor P1
by two tasks (Alloc(Task1)=Alloc(Task2)=P1).
Fig. 4 shows that for each task, there are 4 places
and a T
cp
transition type as well as a place for model-
ing the processor. Both transitions T1allocation and
T2allocation that are fired by the current marking are
in conflict because of the shared place P1. The prior-
ities of the transitions will be calculated according to
the LLF policy. In fact, the LLF makes its schedul-
Figure 4: Allocation processor.
ing decisions based on the maximum time span that a
request can tolerate before being picked up for execu-
tion.
The laxity of a request at any given moment is the
time span that it can tolerate before the time it has
to be picked up for execution; otherwise its deadline
will definitely be missed. As a request is being exe-
cuted, its laxity does not change. However, the laxity
of a task decreases as the request waits (either in the
ready-to-run queue or elsewhere).Its chances of being
overrun increase. When the laxity of a task becomes
zero, it can no longer tolerate waiting.
The laxity of a task is a dynamic value that
changes as the circumstances change. Four values af-
fect its computation:(1) the absolute time of the mo-
ment when we want to compute the laxity of the task,
t,(2) the absolute value of the deadline of this request,
D
i
,(3) the execution time of this request, C
i
, and (4)
the execution time that has been spent on this request
since it was generated, e
i
. The following is the simple
formula for computing the laxity of a request with the
aforementioned values.
L = (D
i
− t) − (C
i
− e
i
) (20)
In Fig. 5, the (D
i
−t) value is presented with the mark-
ing of the place ”RemainingPeriod” and the (C
i
− e
i
)
is presented with the marking of the place ”C
i
”.
The main interest of ”coef” matrix is to provide
a solution for presenting the arithmetic operators. In-
deed, to model the equation L with dPTPN, we in-
tercalate the coefficient ”1” on the arc connecting the
place ”RemainingPeriod” and the T
cp
and ”2” on the
arc between the place ”C
i
” and ”T
cp
”.
The marking of the model Fig. 4 presents
4 marks in T
1
RemainingPeriod and 2 marks in
T
2
RemainingPeriod. The T
2
allocation transition is
the most priority because it has the least laxity (L=2-
1=1). The firing of T2alloctaion involves the extrac-
tion of two marks of P1 and T
2
Ready and a registra-
tion of a mark in T
2
getProc to indicate that the pro-
cessor P1 is attributed to task
2
. The place T
1
Ready
always remains marked because task
1
is always pend-
A FORMAL METHOD FOR SCHEDULING ANALYSIS OF A PARTITIONED MULTIPROCESSOR SYSTEM -
Dynamic Priority Time Petri Nets
323
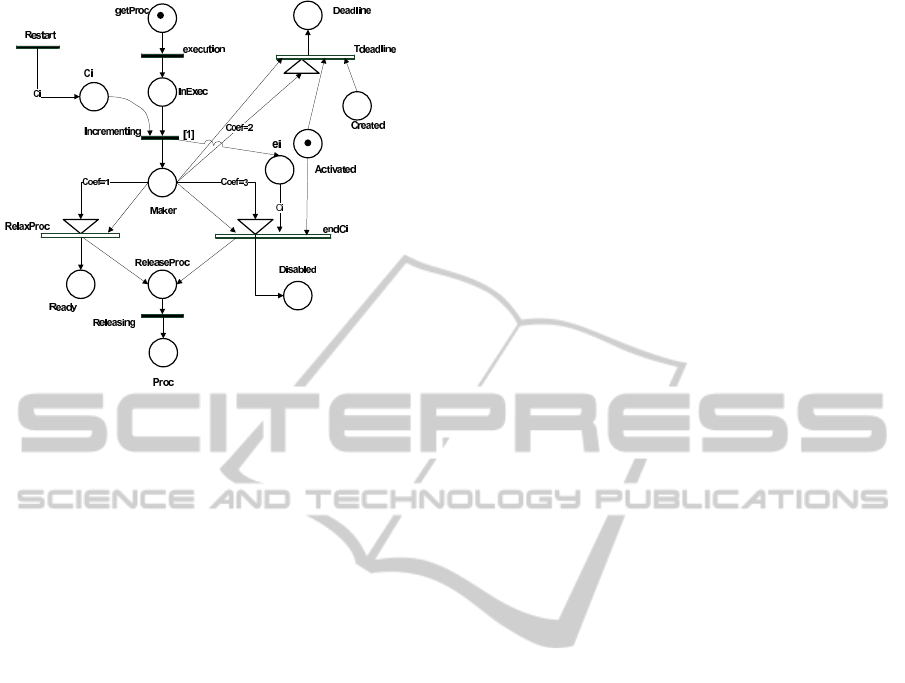
Figure 5: Execution.
ing to the processor P1.
As soon as the marking of the model indicates the
presence of a mark in the place getProc (Fig.5), the
task begins the execution by firing the immediate tran-
sition execution.
It is worthwhile to mention that the interest of the
present paper is the preemptive systems. Indeed, to
manage the modeling of this type of problem, we pro-
pose that each task occupies the processor during only
one unit of time then releases it. The corresponding
dPTPN model is described by a temporal transition
incrementing with a date of firing equal to 1. The fir-
ing of this event allows not only the removal of a mark
from the place Ci and one from the place InExec but
also the registration of a mark in the place maker as
well as the incrementation of the tokens of ei by an-
other mark. Such incrementation indicates that the
task ended a unit of execution during the period Pi.
It should be noted that there is an emergence of
three events endCi, endDeadline and RelaxProc. We
consider the scenario when the three events are en-
abled.
The place maker is a shared place between those
events. So they are modeled with T
cp
transitions and
are in the same neighborhood. We must specify the
priority of each transition for solving the conflict. The
current scenario shows that the task has completed its
Ci units and the deadline is triggered. In the schedul-
ing analysis, this scenario is not considered as non-
schedulable task. Thus, the priority of the endCi tran-
sition is higher than endDeadline. To do so, we at-
tribute the coefficients ”3” to the input arc of endCi
and ”2” to the input arc of ”endDeadline”.
The non-schedulablesystem is described when the
endDeadline and RelaxProc are enabled. It means
that a new period is triggered when the last period is
still activated. Since, the endDeadline must be fired
immediately, we must attribute the higher priority to
it and a smaller priority to RelaxProc (coef=1).
3.2 Case Study
In the present section, we introduce the technique of
how dPTPN solve the scheduling analysis problems
of the real-time systems. It is through a case study
that our dPTPN extension is brought to the light.
In fact, we present a generic experiment which
consists of a non-schedulable system. In the latter, we
establish how the way how the evolution of dPTPN
model supplies a description of the temporal fault to
help the designers in refining the partitioning space
Sw/Hw. It should be born in mind that due to space
limitation, we present a pedagogical experiment.
The case study deals with three tasks running
on two processors. Using definition 17, the spec-
ifications of the task characteristics as well as the
allocation of the processors by the tasks are described
as follows.
Task = {T1(0, 16,16,4), T2(0,8, 8,2), T3(0,4,4, 2),
T4(0,6, 6,4), T5(0,7,7, 4)};
Proc = {P1, P2};
Alloc(T1) = P1 Alloc(T4) = P2
Alloc(T2) = P1 Alloc(T5) = P2
Alloc(T3) = P1
The first stage consists in modeling of Ω with the
dPTPN. As for the second step, it consists in placing
the marks on dPTPN constituents: a mark in each
constituent ”Processor: P1, P2”. A mark in the places
”Uncreated” and ”Disabled” of ”Task : T1, T2, T3,
T4, T5”. We also place 4, 2, 2, 4 and 4 marks on the
places ”Ci” of tasks T1, T2, T3, T4 and T5 respec-
tively.
At this level, let us recall that the strength of our
dPTPN extension is its capacity to determine step by
step the valid scheduling sequence. In fact, the exe-
cution of the model based on dPFM allows the con-
struction of the valid sequence. If the construction is
well established, then the system is well scheduled,
otherwise when the sequence encounters a marking,
then the system is considered as non-schedulable.
Moreover, the supplied scheduling sequence is opti-
mal because dPTPN supports the optimal dynamic
priority LLF strategy.
For a better presentation, we have detailed the ex-
ecution of the model in Table 1. Three columns are
represented; the first ”step” is the number of the steps
in the scheduling, which corresponds to a state in the
states graph explained previously. The first step starts
with ”step=0”. The second column is ”time”; it is the
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
324
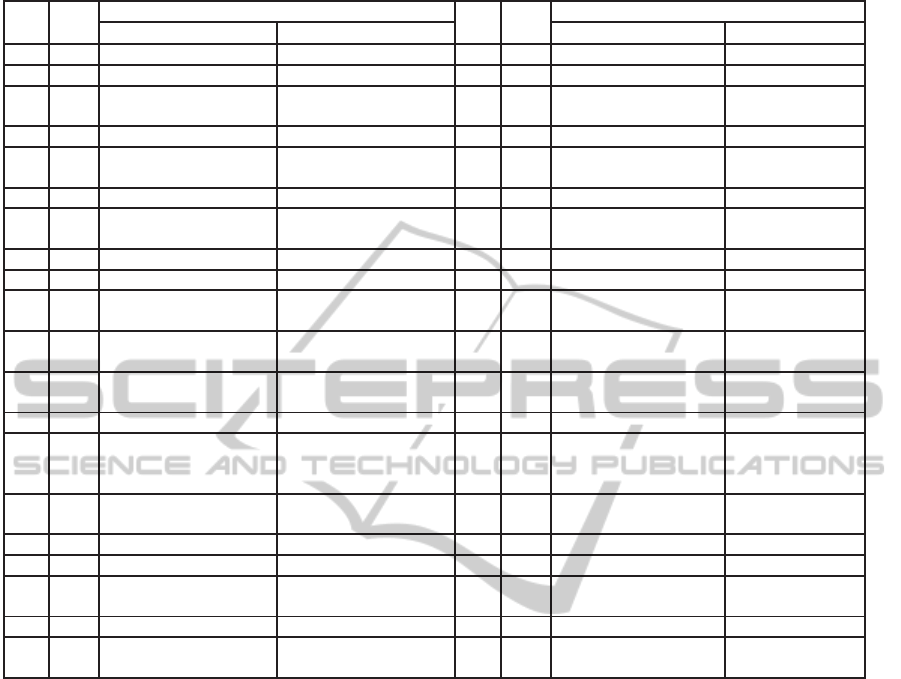
Table 1: Model execution related to the case study.
Step Time
dFT
s
Step Time
dFT
s
FT
s
dFT
s
T
cp
FT
s
dFT
s
T
cp
0 0 Creating(T1,T2,T3,T4,T5) −− 20 4 Restart(T3) −−
1 0 Activation(T1,T2,T3,T4,T5) −− 21 4 Activation(T3) −−
2 0 ⊘ Allocation(T1,T2,T3,T4,T5) 22 4 ⊘ RelaxProc(T2,T5)
EndCi(T2)
3 1 Execution(T3,T4) −− 23 4 Releasing(T2,T5) −−
4 1 Incrementing(T3,T4) −− 24 4 ⊘ Allocation(T1,T3,T4)
IncPeriod(T1,T2,T3,T4,T5)
5 1 ⊘ RelaxProc(T3,T4) 25 4 Execution(T3,T4) −−
6 1 Releasing(T3,T4) −− 26 5 Incrementing(T3,T4) −−
IncPeriod(T1,T2,T3,T4,T5)
7 1 ⊘ Allocation(T1,T2,T3,T4,T5) 27 5 ⊘ RelaxProc(T3,T4)
8 1 Execution(T3,T5) −− 28 5 Releasing(T3,T5) −−
9 2 Incrementing(T3,T5) −− 29 5 ⊘ Allocation(T1,T3,T4)
IncPeriod(T1,T2,T3,T4,T5)
10 2 ⊘ RelaxProc(T3,T5) 30 5 Execution(T3,T4) −−
EndCi(T3)
11 2 Releasing(T3,T5) −− 31 6 Incrementing(T3,T4) −−
IncPeriod(T1,T2,T3,T4,T5)
12 2 ⊘ Allocation(T1,T2,T4,T5) 32 6 Restart(T4) −−
RelaxProc(T3,T4)
13 2 Execution(T2,T4) −− 33 6 ⊘ EndDealine(T4)
EndCi(T3,T4)
14 3 Incrementing(T2,T4) −− 34 6 Releasing(T3,T4) −−
IncPeriod(T1,T2,T3,T4,T5)
15 3 ⊘ RelaxProc(T2,T4) 35 6 ⊘ Allocation(T1,T4,T5)
16 3 Releasing(T2,T4) −− 36 6 Execution(T1,T5) −−
17 3 ⊘ Allocation(T1,T2,T4,T5) 37 7 Incrementing(T3,T5) −−
IncPeriod(T1,T2,T3,T4,T5)
18 3 Execution(T2,T5) −− 38 7 Restart(T5) −−
19 4 Incrementing(T2,T5) −− 39 7 ⊘ RelaxProc(T1,T4)
IncPeriod(T1,T2,T3,T4,T5) EndDealine(T5)
number of tics of the global clock of the PTPN model.
The last column ”Ft
s
” represents the high-priority and
valid transitions in each step of scheduling.
The execution process of the model starts at time
0 with the initial marking M
0
. These two parame-
ters present the necessary entries to launch the dPFM
machine. Such machine determines the high-priority
t
cp
and valid transitions t in the columns FT
s
and
FT
s
T
cp
: Transition-name (Task-name). It is the case
of ”step0”, in which the column FT
s
presents ”Cre-
ation(T1, T2,T3)” and no enabled t
cp
exists. The si-
multaneous firing of this set of events gives birth to a
new marking and a new step ”step1”.
As for ”step2”, it presents no valid temporal event
exist and the event ”Allocation(T1,T2,T3,T4,T5)” in
the column FT
s
T
cp
. This indicates that five tasks
are ready to allocate the processors ”P1” and ”P2”.
”Allocation(T1)” and ”Allocation(T2)” and ”Alloca-
tion(T3)” belong to the same neighborhood. How-
ever, ”Allocation(T3)” has the lowest laxity (highest
priority according LLF) (l=2) . Therefore, it will be
fired before ”Allocation(T1)” and ”Allocation(T2)”.
The transitions with the highest priority are presented
with the red color for each FT
s
T
cp
.
What is worthy to note is that step ”step38”
presents the ”Restart(T5)” event. This indicates that
the period T5 is provoked and a new T5 instance
is created while the work of the last instance is not
achieved. The firing and the passage to the step
”step39” brings about a new marking which replies
to the event ”EndDeadline(T5)”. The firing of this
event implies the blocking of the execution, signaling
a temporal fault (deadline). The current marking de-
scribes the combination of tasks that causes this fault.
It will be a useful feedback to the designer to change
the allocation Task/Processor.
4 CONCLUSIONS
In this paper, we have presented a new method for
scheduling analysis of periodic tasks running on mul-
tiprocessor architecture. The analysis technique is ba-
A FORMAL METHOD FOR SCHEDULING ANALYSIS OF A PARTITIONED MULTIPROCESSOR SYSTEM -
Dynamic Priority Time Petri Nets
325

sed on proposed dynamic Priority Time Petri Nets
dPTPN. Compared to the existing research work, the
salient characteristic of novelty in dPTPN consists
in the attribution of a dynamic priority via a com-
pound transition. Therefore dPTPN supports a dy-
namic Priority-driven policy (LLF) and its seman-
tics isolate the conflict of enabled transitions. Rather
than presenting a solution for the problems of confu-
sion, dPTPN Firing Machine accelerates the dPTPN
evolution by applying temporal filtering for temporal
transitions and priority filtering for T
cp
transitions. In
regular PN, the firing of a transition requires the iden-
tification of the new set of enabled transitions. How-
ever, with dPFM, this set is established only after the
firing of the old one. It is also guided by dynamic pri-
orities. Consequently,starting from a marking M
0
, the
dPFM fires simultaneously valid temporal transitions
and the T
cp
having the highest priority then returns the
new marking M.
In the current paper, we deal with a partitioning
strategy of multiprocessors scheduling. This tech-
nique is concerned as a static scheduling method.
The distribution of tasks on processors is often done
through a tool based on heuristics. When the schedul-
ing analysis technique, i.e. dPTPN, detects a non-
schedulable system, then the tool generates a new so-
lution. This process causes a waste of time gener-
ating problems during implementing of the schedul-
ing strategy. However, dPTPN indicates the exact
description of the non-schedulable sequence and just
changed this sequence to obtain a valid scheduling.
This presents our challenge in future research work.
We are also interested in including performance anal-
ysis in the verification of RTS and planning to inte-
grate dPTPN design patterns ranging building blocks
for an easy model construction and interpretation.
REFERENCES
Antti, V. (1989). Stubborn sets for reduced state space gen-
eration. In Applications and Theory of Petri Nets,
pages 491–515.
Berthomieu, B. and Diaz, M. (1991). Modeling and ver-
ification of time dependent systems using time petri
nets. IEEE Trans. Softw. Eng., 17(3):259–273.
Berthomieu, B., Peres, F., and Vernadat, F. (2006). Bridg-
ing the gap between timed automata and bounded time
petri nets. In FORMATS, pages 82–97.
Buy, U. and Sloan, R. (1994). Analysis of real-time pro-
grams with simple time petri nets. In ISSTA ’94:
Proceedings of the 1994 ACM SIGSOFT international
symposium on Software testing and analysis, pages
228–239, New York, NY, USA. ACM.
Goossens, J., Richard, P., Richard, P., and Bruxelles, U.
L. D. (2004). Overview of real-time scheduling prob-
lems. In Euro Workshop on Project Management and
Scheduling.
Kacem, Y. H., Karamti, W., Mahfoudhi, A., and Abid, M.
(2010). A petri net extension for schedulability analy-
sis of real time embedded systems. In PDPTA, pages
304–314.
Kimmo, V. (1994). On combining the stubborn set method
with the sleep set method. In Valette, R., editor, Ap-
plication and Theory of Petri Nets 1994: 15th Inter-
national Conference, Zaragoza, Spain, June 20–24,
1994, Proceedings, volume 815 of Lecture Notes in
Computer Science, pages 548–567. Springer-Verlag,
Berlin, Germany. Springer-Verlag Berlin Heidelberg
1994.
Kwang, S. H. and Leung, J.-T. (1988). On-line scheduling
of real-time tasks. In IEEE Real-Time Systems Sym-
posium, pages 244–250.
Lime, D. and Roux, O. (2004). A translation based method
for the timed analysis of scheduling extended time
petri nets. In RTSS ’04: Proceedings of the 25th IEEE
International Real-Time Systems Symposium, pages
187–196, Washington, DC, USA. IEEE Computer So-
ciety.
Lime, D. and Roux, O. H. (2009). Formal verification of
real-time systems with preemptive scheduling. Real-
Time Syst., 41(2):118–151.
Liu, C. L. and Layland, J. W. (1973). Scheduling algo-
rithms for multiprogramming in a hard-real-time en-
vironment. J. ACM, 20:46–61.
Mahfoudhi, A., Hadj Kacem, Y., Karamti, W., and Abid,
M. (2011). Compositional specification of real
time embedded systems by priority time petri nets.
The Journal of Supercomputing, pages 1–26. doi
10.1007/s11227-011-0557-9.
Merlin, P. M. (1974). A Study of the Recoverability of Com-
puting Systems. Irvine: Univ. California, PhD Thesis.
available from Ann Arbor: Univ Microfilms, No. 75–
11026.
Petri, C. A. (1962). Fundamentals of a theory of asyn-
chronous information flow. In IFIP Congress, pages
386–390.
Roux, O. H. and D´eplanche, A. M. (2002). A t-time Petri
net extension for real time-task scheduling modeling.
European Journal of Automation (JESA), 36(7):973–
987.
Sha, L., Abdelzaher, T., Arz´en, K. E., Cervin, A., Baker, T.,
Burns, A., Buttazzo, G., Caccamo, M., Lehoczky, J.,
and Mok, K. A. (2004). Real time scheduling theory:
A historical perspective. Real-Time Systems, 28:101–
155. 10.1023/B:TIME.0000045315.61234.1e.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
326
