
BRKGA ADAPTED TO MULTIOBJECTIVE UNIT COMMITMENT
Solving Pareto Frontier for UC Multiobjective Problem using BRKGA SPEA2
NPGA and NSGA II Techniques
Lu´ıs A. C. Roque
1
, Dalila B. M. M. Fontes
2
and Fernando A. C. C. Fontes
3
1
ISEP-DEMA/GECAD, Instituto Superior de Engenharia do Porto, Porto, Portugal
2
FEP/LIAAD-INESC Porto L.A., Universidade do Porto, Porto, Portugal
3
FEUP/ISR-Porto, Universidade do Porto, Porto, Portugal
Keywords:
Unit comitment, Genetic algorithm, Multi objective optimization, Pareto optimal curves.
Abstract:
The environmental concerns are having a significant impact on the operation of power systems. The traditional
Unit Commitment problem, which to minimizes the fuel cost is inadequate when environmental emissions
are also considered in the operation of power plants. This paper presents a Biased Random Key Genetic
Algorithm (BRKGA) approach combined with non-dominated sorting procedure to find solutions for the unit
commitment multiobjective optimization problem. In the first stage, the BRKGA solutions are encoded by
using random keys, which are represented as vectors of real numbers in the interval [0, 1]. In the subsequent
stage, a non-dominated sorting procedure similar to NSGA II is employed to approximate the set of Pareto
solution through an evolutionary optimization process. The GA proposed is a variant of the random key genetic
algorithm, since bias is introduced in the parent selection procedure, as well as, in the crossover strategy. Test
results with the existent benchmark systems of 10 units and 24 hours scheduling horizon are presented. The
comparison of the obtained results with those of other Unit Commitment (UC) multiobjective optimization
methods reveal the effectiveness of the proposed method.
1 INTRODUCTION
The power system generation scheduling is composed
of two tasks: On the one hand, the traditional unit
commitment (UC) that involves scheduling the turn-
on and turn-off of the thermal generating units; on the
other hand, the economic dispatch (ED), which as-
signs, the amount of power that should be produced
by each on-line unit in order to minimize the total
operating costs for a specific time generation hori-
zon. The traditional configuration of this problem was
modified when environmental concerns arised due to
the goals imposed by Kyoto protocol. The carbon
emissions produced by fossil-fueled thermal power
plants should also be minimized. Hence, it is nec-
essary to consider the emission as another objective.
Therefore, we are in the presence of problem with
two, usually conflicting, objectives.
Several methods have been reported in the liter-
ature concerning to the environmental/economic dis-
patch problem. However, to obtain an optimal solu-
tion, it is important to consider not only the output
generation level of each generating unit but also the
turn on/off schedule, due to start-up costs/emissions
that havesignificant influence in the problem solution.
In (Granelli et al., 1992) the problem is formulated
as single objective with an emission limit constraint.
The disadvantage of such an approach is that it does
not allow for obtaining solutions with a tradeoff be-
tween costs and emissions. In addition, this type of
approach leads to solutions maximizing the profit but
disregarding possible solutions with CO2 reduction.
The ε-constraint method for multiobjective opti-
mization was presented in (Hsiao et al., 1994). This
method is based on preferences of the objectives. The
most important objectives are considered while the
other objectives are treated as constraints bounded by
some allowable levels. The main disadvantage of this
approach is to find weakly non-dominated solutions.
Some of the previous studies of unit commit-
ment problems including emission constraints have
been solved using lagrange relaxation methods (Wang
et al., 1995; Yamin et al., 2007). In (Wang et al.,
1995) an augmented lagrange relaxation is used
to solve a unit commitment considering the typi-
cal system constraints such as power balance, min-
64
A. C. Roque L., B. M. M. Fontes D. and A. C. C. Fontes F..
BRKGA ADAPTED TO MULTIOBJECTIVE UNIT COMMITMENT - Solving Pareto Frontier for UC Multiobjective Problem using BRKGA SPEA2 NPGA
and NSGA II Techniques.
DOI: 10.5220/0003759500640072
In Proceedings of the 1st International Conference on Operations Research and Enterprise Systems (ICORES-2012), pages 64-72
ISBN: 978-989-8425-97-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

imum up/down time and ramp rate constraints and
adding transmission and environmental constrains. In
(Yamin et al., 2007) lagrange relaxation is combined
with evolutionary programming.
Current research is directed to handle both ob-
jectives simultaneously as competing objectives in-
stead of simplifying the multiobjective problem to a
single objective problem. Three multiobjective evo-
lutionary algorithms (MOEAs) have been applied to
the Economic Dispatch (ED) problem with meaning-
ful success (Abido, 2003c; Abido, 2003b; Abido,
2003a). Since they use a population of solutions
in their search, multiple Pareto-optimal solutions
can, in principle, be found in one single run. Dif-
ferent MOEAs like Niched Pareto Genetic Algo-
rithm (NPGA) (Horn et al., 1994), Strength Pareto
Evolutionary Algorithm (SPEA) (Zitzler and Thiele,
1998) and Non-dominated Sorting Genetic Algorithm
(NSGA) (Srinivas and Deb, 1994) have been applied
to this problem. These models can be efficiently
used to eliminate most of the difficulties of classical
methods. However, the quality and diversity of the
nondominated solutions presented in (Abido, 2003c;
Abido, 2003b; Abido, 2003a) have not been measured
and assessed quantitively. In (Abido, 2006) a com-
parative study among MOEA techniques was devel-
oped to evaluate their potential to solve the multiob-
jective ED problem. The potential of MOEA to han-
dle this problem is investigated and their effectiveness
to solve the ED multiobjective problem was shown.
It is important to refer that new versions of MOEAs
were presented such as NSGA-II (Deb et al., 2002),
and SPEA2 (Zitzler et al., 2001). The NSGA-II algo-
rithm was also applied to the ED multiobjective prob-
lem in (Basu, 2008).
Gonc¸alves and Resende (2010) introduce the tuto-
rial on the implementation and use of Biased Random
Key Genetic Algorithm (BRKGA) for solving com-
binatorial optimization methods. More recently, in
(Roque et al., 2011) the BRKGA approach is used to
find solutions for single objective Unit Commitment
problem.
In this paper the BRKGA algorithm combined
with nondominated sorted procedure and MOEA
techniques is applied to the two standard 10-unit 24-
hour test systems presented in (Winter et al., 2003)
and (Sawaragi et al., 1985). The proposed ap-
proach BRKGA is combined with a ranking selection
method, that is used to focus on different levels of the
nondominated solutions, and a sharing fitness proce-
dure as in NSGA.
The paper is organized as follows: Following
the description of the problem formulation, which is
given in section 2, an explanation on the BRKGA and
its implementation to the UC bi-objective problem, is
given in section 3. Section 4 provides test results and
finally in Section 5 some conclusions are drawn.
2 UC MULTIOBJECTIVE
PROBLEM FORMULATION
In the multiobjective UC problem one needs to de-
termine an optimal schedule, which minimizes the
production cost and emission of atmospheric pollu-
tants over the scheduled time horizon subject to sys-
tem and operational constraints. Due to its combina-
torial nature, multi-period characteristics, and nonlin-
earities, the UC problem is a hard optimization prob-
lem, which involves both integer and continuous vari-
ables and a large set of constraints.
Let us now introduce the parameters and variables
notation.
Decision Variables:
Y
t,j
: Thermal generation of unit j at time period t, in [MW];
u
t,j
: Status of unit j at time period t (1 if the unit is on; 0
otherwise);
Auxiliary Variables:
T
on/off
j
(t): Time periods for which unit j has been continu-
ously on-line/off-line until time period t, in [hours];
Parameters:
T: Number of time periods (hours) of the scheduling time
horizon;
t: Time period index;
N: Number of generation units;
j: Generation unit index;
R
t
: System spinning reserve requirements at time period t,
in [MW];
D
t
: Load demand at time period t, in [MW];
Ymin
j
: Minimum generation limit of unit j, in [MW];
Ymax
j
: Maximum generation limit of unit j, in [MW];
N
b
: Number of the base units;
T
on/off
min,j
: Minimum uptime/downtime of unit j, in [hours];
T
c,j
: Cold start time of unit j, in [hours];
S
H/C,j
: Hot/Cold start-up cost of unit j, in [$];
SD
j
: Shut down cost of unit j, in [$];
S
e,j
: Start-up atmospheric pollutant emission of unit j, in
[ton−CO2] if CO2 or [mg/Nm
3
] if nitrogen oxides;
∆
dn/up
j
: Maximum allowed output level decrease/increase
in consecutive periods for unit j, in [MW];
2.1 Objective Functions
As already said, in the multi-objective problem for-
mulation, two important objectives in electrical ther-
mal power system are considered. These are economy
and environmental impacts.
On the one hand, the first objective is to minimize
the system operation costs composed by generation
and start-up costs. The generation costs, i.e. the fuel
costs, are conventionally given by a quadratic cost
function as in equation (1),
BRKGA ADAPTED TO MULTIOBJECTIVE UNIT COMMITMENT - Solving Pareto Frontier for UC Multiobjective
Problem using BRKGA SPEA2 NPGA and NSGA II Techniques
65

F
j
(Y
t, j
) = a
j
· (Y
t, j
)
2
+ b
j
·Y
t, j
+ c
j
, (1)
where a
j
,b
j
,c
j
are the cost coefficients of unit j.
Therefore, the cost incurred with an optimal
scheduling is given by the minimization of the total
costs for the whole planning period, as in equation
(2).
Minimize
T
∑
t=1
N
∑
j=1
{F
j
(Yth
t, j
) · u
t, j
(2)
+ SU
t, j
· (1− u
t−1, j
) · u
t, j
(3)
+SD
j
· (1− u
t, j
) · u
t−1, j
}
!
.
where S
t, j
and SD
t, j
are the start-up and shut-down
costs of unit j at time period t, respectively.
On the other hand, the second objective is to
minimize the total quantity of atmospheric pollutants
emission. The emissions are generally expressed as a
quadratic function:
E
j
(Y
t, j
) = α
j
· (Y
t, j
)
2
+ β
j
·Y
t, j
+ γ
j
, (4)
where α
j
,β
j
,γ
j
are the emission coefficients of unit j.
So, the total emission of atmospheric pollutants is
expressed as follows:
Minimize
T
∑
t=1
N
∑
j=1
{E
j
(Yth
t, j
) · u
t, j
(5)
+Se
t, j
· (1− u
t−1, j
) · u
t, j
}
!
.
where Se
j
is the start-up atmospheric pollutant emis-
sions of unit j at time period t.
2.2 Constraints
The constraints can be divided into two sets: the de-
mand constraints and the technical constraints. Re-
garding the first set of constraints it can be further
divided into load requirements and spinning reserve
requirements, which can be written as follows:
1) Power Balance Constraints.
The total power generated must cover the total load
demand, for each time period.
N
∑
j=1
Y
t, j
· u
t, j
≥ D
t
,t ∈ {1,2,...,T}. (6)
2) Spinning Reserve Constraints.
The spinning reserve is the total amount of real power
generation available from on-line units net of their
current production level.
N
∑
j=1
Ymax
j
· u
t, j
≥ R
t
+ D
t
,t ∈ {1, 2, ...,T}. (7)
The second set of constrains includes unit output
range, minimum number of time periods that the unit
must be in each status (on-line and off-line), and the
maximum output variation allowed for each unit.
3) Unit Output Range Constraints.
For each time period t and unit j, the real power out-
put of each generator is restricted by maximum and
minimum production limits.
Ymin
j
· u
t, j
≤ Y
t, j
≤ Ymax
j
· u
t, j
. (8)
4) Ramp Rate Constraints.
Due to the thermal stress limitations and mechanical
characteristics, the output variation levels of each on-
line unit in two consecutive periods are restricted by
ramp rate limits.
−∆
dn
j
≤ Y
t, j
−Y
t−1, j
≤ ∆
up
j
. (9)
5) Minimum Uptime/Downtime Constraints.
If the unit has already turned on or off, there will be
a minimum uptime/downtime time before it is shut-
down or started-up, respectively.
T
on
j
(t) ≥ T
on
min, j
and T
of f
j
(t) ≥ T
of f
min, j
. (10)
3 MULTIOBJECTIVE UC
OPTIMIZATION
3.1 Decoding Procedure
The decoding procedure is commonly used in all
four multiobjective optimization algorithms. For
each chromosome, the corresponding solution is per-
formed in two main stages, as it can be seen in Figure
2 in (Roque et al., 2011). Firstly, the output genera-
tion level matrix for each unit and period is computed
from random key value. In this solution, the units
production is proportional to their priority, which is
given by the random key value. By doing so, each
element of the output generation matrix, Y
t, j
is given
as the product of the percentage vectors by the peri-
ods demand D
t
. Here each component of the percent-
age vectors are given by corresponding random key
entrie divided by the sum of the all random key val-
ues as illustrated in algorithm 1 (Roque et al., 2011).
Then, these solutions are checked for constraints sat-
isfaction using a repair algorithm presented in (Roque
et al., 2011).
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
66

3.2 Repair Algorithm
The idea of this technique is to convert any infeasi-
ble individuals to a feasible solution by repairing the
sequential possible violations constraints in the UC
problem. The repair algorithm is composed by several
steps. Firstly, the output levels are adjusted in order
to satisfy the output range constraints. Next, we have
the adjustment of output levels to satisfy ramp rate
limits. It follows the repairing of the minimum up-
time/downtime constraints violation. Afterwards, the
output levels are adjusted in order to satisfy spinning
reserve requirements. Finally, the output levels are
adjusted for demand requirements satisfaction at each
time period. For details about the repairing mecha-
nisms, the reader is refered to (Roque et al., 2011).
3.3 NSGA
A fast and elitist non-dominated sorted genetic algo-
rithm (NSGA II) (Deb et al., 2002) is used to approx-
imate the set of Pareto solution. In this approach,
the ranking selection method is used to focus on non-
dominated solutions while the crowding distance is
computed to ensure diversity along the nondominated
front. The population of size N
p
is used for selec-
tion, crossover,and mutation to create a new offspring
population of equal size. The rank procedure is em-
ployed by different levels of domination until all in-
dividuals in the intermediate combined population, of
size 2N
p
, are ranked. Firstly, the nondominated solu-
tions are assigned with same rank value and thereafter
the crowding distance is computed. The nondomi-
nated solutions must be emphasized more than any
other solution. In order to find individuals of the next
front, the solutions of the first front are temporarily
ignored, and the above procedure is repeated to find
subsequent fronts. The individuals of the new popu-
lation are selected from the intermediate population,
they are chosen from subsequent nondominatedfronts
in the order of their ranking. To choose exactly the
population members, the solutions of the last front are
sorted considering the crowding distance by descend-
ing order. The NSGA-II approach proposed by (Deb
et al., 2002) was implementated as follows:
• Generate random population, decoding the indi-
viduals and evaluate the solutions;
• Sort the population using non-domination-sort.
For each individual, rank and crowding distance
are assigned;
• For each generation the follows steps are given:
Select the parents, which are fit for reproduction
by using the binary tournament selection based on
the rank and crowding distance; genetic operators
copy, simulated binary crossover and mutation are
applied under selected parents; the offspring pop-
ulation is combined with parents (the size of in-
termediate population is the double); selection is
performed to set the individuals of the next gen-
eration; after sorting the intermediate population
, only the best individuals are selected based on
its rank and crowding distance; a new generation
is then obtained mantaining the population size
fixed; the algorithm stop criterium is the max-
imum number of generations previously estab-
lished.
3.4 NPGA
A Niched pareto genetic algorithm was presented in
(Horn et al., 1994). This thecnique involves the addi-
tion of two specialized genetic operators: Pareto dom-
ination tournaments and fitness sharing. These oper-
ators allow for selection based on partial ordering of
the population, as well as, to preserve diversity in the
population.
Tournament selection is used to adjust selection
pressure by changing the tournament size. Two can-
didates are chosen at random from the current popu-
lation. A comparison set of tdom individuals is also
chosen randomly. Each of the candidates are com-
pared to each individual in the comparison set. If a
candidate is dominated by the comparison set, and
other is not, it loses the competition. If there are tour-
nament ties, i.e. neither or both are dominated by the
comparison set, the decision is based on the fitness
sharing of individuals, using niche counts as calcu-
lated for the objective space in (Horn et al., 1994).
Each canditate niche count is computed in the objec-
tive space, using its evaluated objective values. The
candidate with lowest niche count wins the tourna-
ment. Tournaments are held until the next generation
is filled. Then crossover and mutation operators are
applied to the new population. As already said, in the
case of a tie, the population density around each can-
didate is computed within a specified distance, known
as the niche radius σ
share
. The niche count for candi-
date i is given by:
m
i
=
(
∑
j∈Pop
1−
d
i, j
σ
share
if
d
i, j
< σ
share
0
if
d
i, j
>= σ
share
,
(11)
The winner of the tied tournament is the competi-
tor with the lowest niche count. As in (Horn et al.,
1994), the fitness sharing is updated continuously,
once the niche counts are calculated using individuals
in the partially filled population of the next genera-
BRKGA ADAPTED TO MULTIOBJECTIVE UNIT COMMITMENT - Solving Pareto Frontier for UC Multiobjective
Problem using BRKGA SPEA2 NPGA and NSGA II Techniques
67

tion, rather than that of the current generation.
3.5 SPEA
The Strenght Pareto Evolutionary Algorithms
(SPEAs) was introduced in (Zitzler and Thiele,
1998) and an improve version, known as SPEA II
is given in (Zitzler et al., 2001). In this algorithm,
nondominated solutions are stored in an external
set. The individuals are assigned according to the
Pareto dominance concept. When the nondominated
solutions exceds a previously fixed size for the
external set, the number of individuals in the external
set is reduced by means of a truncation thecnique, as
in (Zitzler et al., 2001). If the number of nondomi-
nated individuals is less than the predefined external
set size, the external set is filled up by dominated
individuals. The fitness assignment occurs in two
different stages. The individuals are assigned by the
strengths of its dominators in both the external set
and the population. Strenght represents the number
of individuals in the population and in the external set
covered by individual considered. The fitness of each
individual is given by the sum of the strenghts of its
dominators in the external set and in the population.
If individuals have equal fitness value, the density
estimation technique, as given in SPEA2 (Zitzler
et al., 2001), is used. This technique results from an
adaptation of the k−th nearest neighbor method. The
basic idea of the truncation procedure is to remove
the individual which has the minimum distance to
another individual. If there are several individuals
with minimum distance, the individuals with second
smallest distances to another individual are removed
and so on. The SPEA-II approach proposed by
(Zitzler et al., 2001) implementates the following
steps:
• Generate the initial population, decoding the indi-
viduals and evaluate the solutions and create the
empty external pareto-optimal;
• Compute fitness values of individuals in the pop-
ulation and in the external set;
• Copy nondominated individuals of the population
to the external set;
• For each generation: Update the external set keep-
ing only the nondominated solutions. When the
number of nondominated solutions is higher than
the specified size for the external set, it is reduced
by applying the truncation thecnique. If the num-
ber of nondominated individuals is less than the
external set size, the external set is filled up by
dominated individuals;
• The mating pool is filled using binary tournament
selection with replacement on the updated exter-
nal set;
• After the recombination, of the mating pool, the
crossover and mutation operators are applied and
a new population is created;
• The algorithm stops when the maximum number
of generations is reached.
3.6 BRKGA adapted to Multiobjective
UC Optimization
We also use the ranking selection method for ordering
the nondominated solutions according to the Pareto
domination concept while the crowding distance is
used to break ties by chosing the best indiduals to
be included in new population. For details about the
BRKGA approach, the reader is refered to (Gonc¸alves
and Resende, 2010; Roque et al., 2011). The ini-
tial population with size N
p
is criated by generating
the random keys. Given population of chromosomes
(random keys) a decoding procedure is applied such
that at each chromosome corresponds a feasible UC
solution, that is an output generation level matrix and
the corresponding unit status matrix both satisfying
the UC constraints. The fitness function used to eval-
uate the solutions includes both the total operational
costs and CO2 emissions. We adopt a fitness proce-
dure similar to that of NSGA-II, given in (Deb et al.,
2002). Therefore, the population is sorted based on
the nondomination. Each solution is assigned a fit-
ness (rank) equal to its nondomination level. The bi-
ased selection and biased crossover operators and the
introduction of mutants are used to create a offspring
population, also of size N
p
. On the one hand, the bi-
ased selection ensures that one of the parents used for
mating comes from a subset containing the best so-
lutions of the current population. On the other hand,
the biased crossover chooses with higher probability
an allele from the best parent. Mutants are generated
as the initially population and are introduced directely
on the next generation.
We start by combining the current population with
the newly obtained one. The combined population
size is the double (2N
p
) of the current population and
it is sorted by the nondomination criterium (Fast Non-
dominated Sorting Approach).
The nondomination criterium leads to several lev-
els of nondominated fronts. For the first level, the
nondominated individuals of the combined popula-
tion are chosen. Second level, corresponds to a front
containing individuals only dominated by the individ-
uals of the first level front. All other levels are defined
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
68
in a similar way, that is, in each level a front contain-
ing individuals dominated by all previous nondomi-
nated fronts is obtained. In order to obtain the new
population we go through the generated fronts, in as-
cending order of level, and include all its individuals
until we reach N
p
. At the last nondominated front
level to be included if only some of the individuals
are to be chosen, the descending order of crowding
distance is used as a selection criterium.
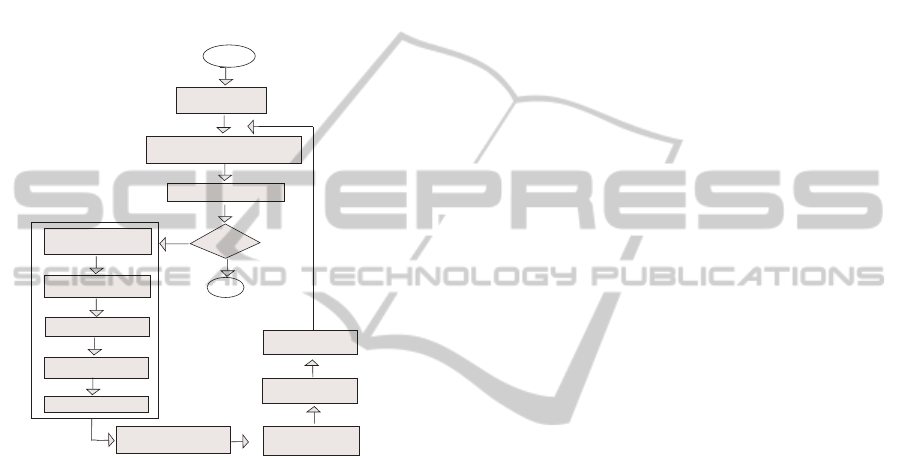
The multiobjective BRKGA flowchart is illus-
trated in Figure 1.
Entry
Generation of
random key vectors
All
generations?
Exit
y
n
Generate mutants
Biased crossover
Classify
as elit or non-elite
Crowding distance
assignment
Fast Nondominated
Sorting Approach
Combine new population
and current population
Sort new
population
Evaluate
Select Parents
Copy elit
Decoding:
Generate a feasible solution
New
population
Figure 1: Flowchart of BRKGA multiojective algorithm.
3.6.1 Genetic Operators in BRKGA
Biased Selection: Pair of parents are selected from
parent population. The parent population is divided
into two sets: The elit set, comprising the best indi-
viduals, and the non-elit set, comprising the remain-
ing individuals. One parent is selected from the elit
set, while the other parent is chosen from the remain-
ing, non-elite, individuals.
Biased Crossover. Given two parents and a spec-
ified probability of crossover, the crossover inter-
changes the genes or alleles to produce a new individ-
ual. As already mentioned, genes are chosen by using
a biased uniform crossover, that is, for each gene a
biased coin is tossed to decide on which parent the
gene is taken from. This way, the offspring inherits
the genes from the elite parent with higher probabil-
ity (0.7 in our case).
Mutants. To ensure diversity and to avoid prema-
ture convergence, we introduce a percentage of new
individuals, called mutants, in the population. These
individuals are randomly generated as was the case
for the initial population.
4 COMPUTATIONAL
EXPERIMENTS AND RESULTS
4.1 GA Parameters
4.1.1 BRKGA Configuration
The BRKGA final parameter values were decided
after some empirical experiments have been per-
formed. The experimented values were chosen using
the guidelines provided by (Gonc¸alves and Resende,
2010; Deb et al., 2002), as well as, the computational
experiments in (Roque et al., 2011). The current pop-
ulation of solutions is evolved by the GA operators
onto a new population as follows:
Elit set is formed by 20% of best solutions; 40%
of the new population is obtained by introducing mu-
tants; Finally, the remaining 60% of the population
is obtained by biased reproduction, which is accom-
plished by having both a biased selection and a biased
crossover. Moreover, we set the number of genera-
tions to 100 (10N), the population size to 40(4N) and
the crossover probability to 0.7.
4.1.2 SPEA, NSGA, and NPGA Configurations
The algorithms are implemented according to their
description in the literature. The other operators (re-
combination, mutation, sampling) remain identical.
To ensure the same conditions of application of the
method BRKGA, identical population size of 40 and
number of generations of 100 to BRKGA are used for
each algorithm.
The NPGA, NSGA II, and SPEA2 parameters val-
ues are choosen using the guidelinesproposed in (Deb
et al., 2002). Some complementary computational ex-
periments are performed, where other appropriate val-
ues of the GA parameters are arrived at based on the
satisfactory performance of trials conducted for this
application with different range of values. For NPGA,
the niche radius σ
share
= 0.1 was choosed as in (Horn
et al., 1994) and several computational experiments
were made in order to choose the size of the compar-
ison set t
dom
. The parameter ranges between 5% and
30%. The results obtained have shown a favorable
value of t
dom
to be 10%.
For NPGA and NSGA II real coding an intermedi-
ate crossover similar to Matlab crossover operator has
been employed. The childs are obtained as Child
1
=
Parent
1
+ rand.ratio.(Parent
2
− Parent
1
) and
BRKGA ADAPTED TO MULTIOBJECTIVE UNIT COMMITMENT - Solving Pareto Frontier for UC Multiobjective
Problem using BRKGA SPEA2 NPGA and NSGA II Techniques
69
Child
2
= Parent
2
− rand.ratio.(Parent
2
− Parent
1
)
where rand is random number in the interval [0,1], the
ratio crossover was set 1.2 and the crossover probabil-
ity to 0.8. The Gaussian mutation is used as in Matlab
Toolbox Opimization with scale = 0.1,shrink = 0.5.
The mutation rates has been set to 0.2.
For SPEA2, we use a population of size 40 and an
external population of size 40, so that overall popu-
lation size becomes 80. The uniform crossover and
simulated binary crossover operators are applied with
probability 0.7 and 0.9, respectively. For real-coded
crossover, the probability distribution used in the sim-
ulated binary crossover operator has been set up dis-
tribution indice η
c
of 5. Like in (Deb and Agrawal,
1995), we use the polynomial mutation described as
follows: if x
i
is the decision variable selected for mu-
tation with a probability p
m
, the result of the mutation
is the new value x
′
i
obtained by a polynomial proba-
bility distribution P(δ) =
1
2
.(η
m
+ 1)(1 − |δ|). x
L
i
and
x
U
i
are the lower and upper bound of x
i
, respectively,
and r
i
is a random numberin the interval[0,1]. Hence,
we have
x
′
i
= x
i
+
x
U
i
− x
L
i
.δ
i
with
δ
i
=
(
(2r
i
)
1
η
m
+1
− 1
if
r
i
< 0.5,
1− |2(1− r
i
)|
1
η
m
+1
if
r
i
>= 0.5.
(12)
The distribution index η
m
was set to 15 and the mu-
tation probability to 0.1. Table 1 has the population
size, the crossover and mutation probabilities, and the
number of generations used in each approach.
Table 1: GA Parameters.
BRKGA NSGAII NPGA SPEA2
Population size 40 40 40 40
Crossover probability 0.7 0.8 0.8 0.9
Mutation probability 0.2 0.2 0.1
N. Generations 100 100 100 100
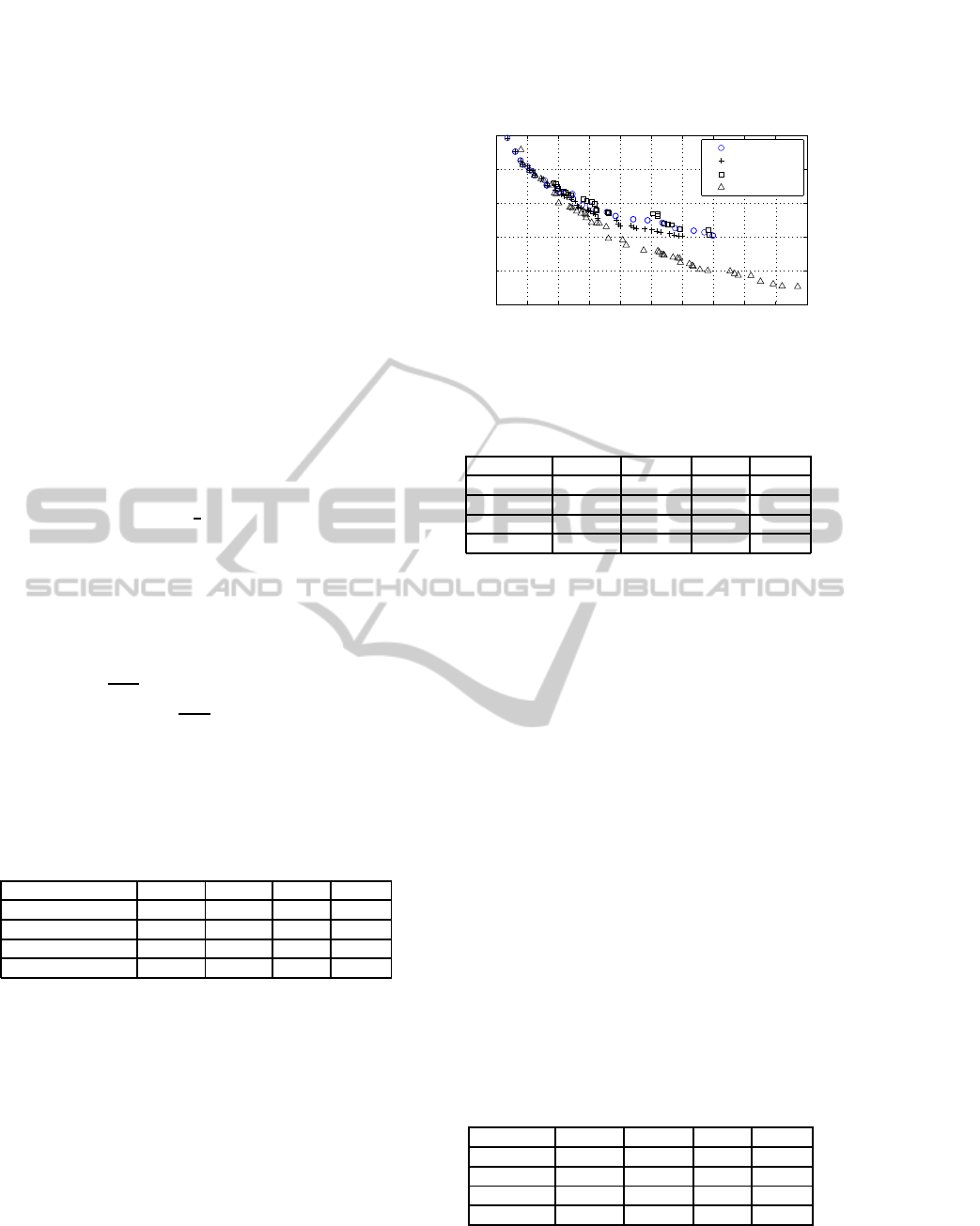
4.2 Case 1 Results
Here, we present the results obtained for case study
1. The problem data is provided in Appendix A. The
BRKGA has the most widely spread front, as it can be
seen in Figure 2, and the average values of the cover-
age metric measure (Zitzler and Thiele, 1999), over
10 optimization runs, as shown in Table 2. We can
oberve that the nondominated solutions of BRKGA
covers relatively higher percentages of the other solu-
tions.
On the one hand, as can be seen in Table 2, on
average the nondominated set achieved by BRKGA
6.2 6.3 6.4 6.5 6.6 6.7 6.8 6.9 7 7.1 7.2
x 10
5
1.9
2
2.1
2.2
2.3
2.4
x 10
4
COST($)
CO2(t−CO2)
NSGA
SPEA
NPGA
BRKGA.NSGA
Figure 2: Pareto-optimal fronts obtained from different al-
gorithms in a single run.
Table 2: Percentage of Nondominated Solutions of set B
covered by those in set A.
set A / set B BRKGA NSGA II NPGA SPEA2
BRKGA 67.3 99.5 70.3
NSGA II 13.9 76 8.8
NPGA 0 10.3 0
SPEA2 13.9 61.3 98.8
dominates about 67.3 % of the nondominated solu-
tions found by NSGA II. However, the front obtained
by NSGA II only dominates in less than 13.9 % of
the nondominated solutions produced by BRKGA.
On the other hand, with regard to NPGA, a BRKGA
front dominates on average 99.5% of the correspond-
ing NPGA front, while the nondominated set pro-
duced by NPGA never dominates the front obtained
by BRKGA. Finally, the nondominated set achivied
by BRKGA dominates about 70.3% of the nondomi-
nated solutions found by SPEA2 while the front ob-
tained by SPEA2 dominates only in less than 13.9%.
4.3 Case 2 Results
In this section, we provide the results obtained for
case study 2. For problem details see Appendix B
and the reference therein. The BRKGA average val-
ues of the coverage metric measure over 10 optimiza-
tion runs are showed in Table 3. We can oberve that
the nondominated solutions of SPEA2 and BRKGA
covers relatively higher percentages of the other solu-
tions.
Table 3: Percentage of Nondominated Solutions coverages.
set A / set B BRKGA NSGA II NPGA SPEA2
BRKGA 88.5 75 30.3
NSGA II 11 49 4
NPGA 22.3 40 10.8
SPEA2 84.8 98.5 92.5
In Table 3, we can observe that, on average,
the nondominated set achieved by BRKGA domi-
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
70
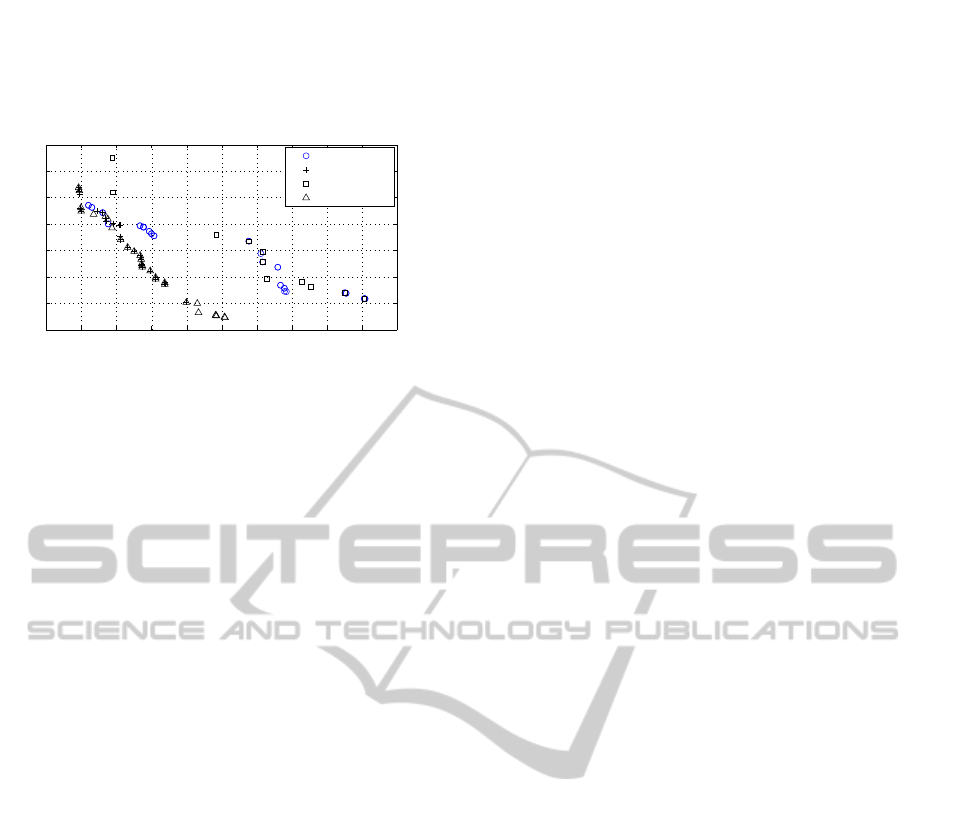
7.5 7.6 7.7 7.8 7.9 8 8.1 8.2 8.3 8.4 8.5
x 10
5
4
4.5
5
5.5
6
6.5
7
7.5
x 10
5
Fuel cost (x1000) [monetary units]
NOx concentration (x10000) [mg/Nm
3
]
NSGA
SPEA
NPGA
BRKGA.NSGA
Figure 3: Pareto-optimal fronts obtained from from differ-
ent algorithms in a single run.
nates 88.5% of the nondominated solutions found
by NSGA II, while the front obtained by NSGA II
dominates less than 11 % of the nondominated solu-
tions produced by BRKGA. Moreover, the BRKGA
front dominates on average 75% of the correspond-
ing NPGA front while the nondominatedset produced
by NPGA dominates less than 22.3 % of the non-
dominated solutions produced by BRKGA. Finally,
SPEA2 front dominates on average 84.8% of the cor-
respondingBRKGA front while the nondominated set
produced by BRKGA dominates 30.3 % of the non-
dominated SPEA2 solutions.
5 CONCLUSIONS
In this paper a new approach is used to find Pareto sets
for multiobjective unit commitment problem. The
proposed algorithm combines the biased selection and
biased crossover of the BRKGA approach with non-
dominated sorting procedure and crowded compari-
son operator used in NSGA II technique.
The algorithm maintains a finite-sized archive of
nondominated solutions which gets iteratively up-
dated in the presence of new solutions based on the
concept of pareto dominance. The multiple Pareto
optimal solutions can be found in one simulation run
such as in other multiobjective techniques.
The proposed approach has been assessed through
a comparative study, for two case study problems,
with other multiobjective optimization techniques.
The best results are obtained for SPEA2 and BRKGA
approachs. The results shows that BRKGA can be
an effective method for producing tradeoff curves.
Tradeoff curves such as those presented here may give
decision makers the capability of making better deci-
sions. Given that the approachs have similar decode
procedures, the improvement in performance is most
likely due to elitism. Elitism also guarantees that no
good solutions are lost.
ACKNOWLEDGEMENTS
The financial support by FCT, POCI 2010
and FEDER, through project PTDC/EGE-
GES/099741/2008 is gratefully acknowledged.
REFERENCES
Abido, M. A. (2003a). Environmental/economic power dis-
patch using multiobjective evolutionary algorithms.
IEEE Trans. Power Syst., ‘18:‘1529–1537.
Abido, M. A. (2003b). A niched pareto genetic algorithm
for multiobjective environmental/economic dispatch.
Electr. Power Energy Syst., ‘25:97–105.
Abido, M. A. (2003c). A novel multiobjective evolution-
ary algorithm for environmental/economic power dis-
patch. Electr. Power Syst. Res., ‘65:‘71–81.
Abido, M. A. (2006). Multiobjective evolutionary algo-
rithms for electric power dispatch problem. IEEE
Transactions on Evolutionary Computation, ‘10:315–
329.
Basu, M. (2008). Dynamic economic emission dispatch us-
ing non-dominated sorting genetic algorithm-ii. Elec-
tric Power Energy System, 30:140–149.
Deb, K. and Agrawal, R. B. (1995). Simulated binary
crossover for continuous search space. Complex Sys-
tems, 9:115–148.
Deb, K., Pratab, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
Nsga-ii. IEEE Trans. Evol. Comput., 6:182–197.
Gonc¸alves, J. F. and Resende, M. G. C. (2010). Biased
random-key genetic algorithms for combinatorial op-
timization. Journal of Heuristics, 17:487–525.
Granelli, G. P., Montagna, M., Pasini, G. L., and Maran-
nino, P. (1992). Emission constrained dynamic dis-
patch. ‘Electr. Power Syst. Res., ‘24:‘56–62.
Horn, J., Nafpliotis, N., and Goldberg, D. E. (1994). A
niched pareto genetic algorithm for multiobjective op-
timization. In 1st IEEE Conf. Evol. Comput., IEEE
World Congr. Comput. Intell., volume 1, pages 67–72.
Hsiao, Y. T., Chiang, H. D., Liu, C. C., and Chen, Y. L.
(1994). A computer package for optimal multiobjec-
tive var planning in large scale power systems. IEEE
Trans. Power Syst., ‘9:‘668–676.
Roque, L., Fontes, D. B. M. M., and Fontes, F. A. C. C.
(2011). A biased random key genetic algorithm ap-
proach for unit commitment problem. Lecture Notes
in Computer Science, 6630:327–339.
Sawaragi, Y., Nakayama, H., and Tanino, T. (1985). Theory
of multiobjective optimization. Orlando: Academic
Press.
Srinivas, N. and Deb, K. (1994). Multiobjective function
optimization using nondominated sorting genetic al-
gorithms. Evol. Comput., 2:221–248.
Wang, S., Shahidehpour, M., Kirschen, D. S., Mokhtari,
S., and Irissari, G. (1995). Short-term generation
scheduling with transmission and environmental con-
straints using an augmented lagrangian relaxation.
IEEE Trans Power Systems, ‘10:1294–300.
BRKGA ADAPTED TO MULTIOBJECTIVE UNIT COMMITMENT - Solving Pareto Frontier for UC Multiobjective
Problem using BRKGA SPEA2 NPGA and NSGA II Techniques
71
Winter, G., Greiner, D., Gonzalez, B., and Galvan, B.
(2003). Economical and environmental electric power
dispatch optimisation. In ‘EUROGEN-2003 Confer-
ence.
Yamashita, D., Niimura, T., Yokoyama, R., and Marmiroli,
M. (2010). Pareto-optimal solutions for trade-off anal-
ysis of c02 vs. cost based on dp unit commitment. In
2010 International Conference on Power System Tech-
nology.
Yamin, H. Y., El-Dwairi, Q., and Shaihidehpour, S. M.
(2007). A new approach for genco profit based unit
commitment in day-ahead competitive electricity mar-
kets considering reserve uncertainty. Int J Elec Power
Energy Systems, 29:609–16.
Zitzler, E., Laumanns, M., and Thiele, L. (2001). Spea2:
Improving the strength pareto evolutionary algorithm.
TIK-Rep. 103.
Zitzler, E. and Thiele, L. (1998). An evolutionary algorithm
for multiobjective optimization: The strength pareto
approach. TIK-Rep., 43.
Zitzler, E. and Thiele, L. (1999). Multiobjective evolu-
tionary algorithms: A comparative case study and the
strength pareto approach. IEEE Trans. Evol. Comput.,
3:257–271.
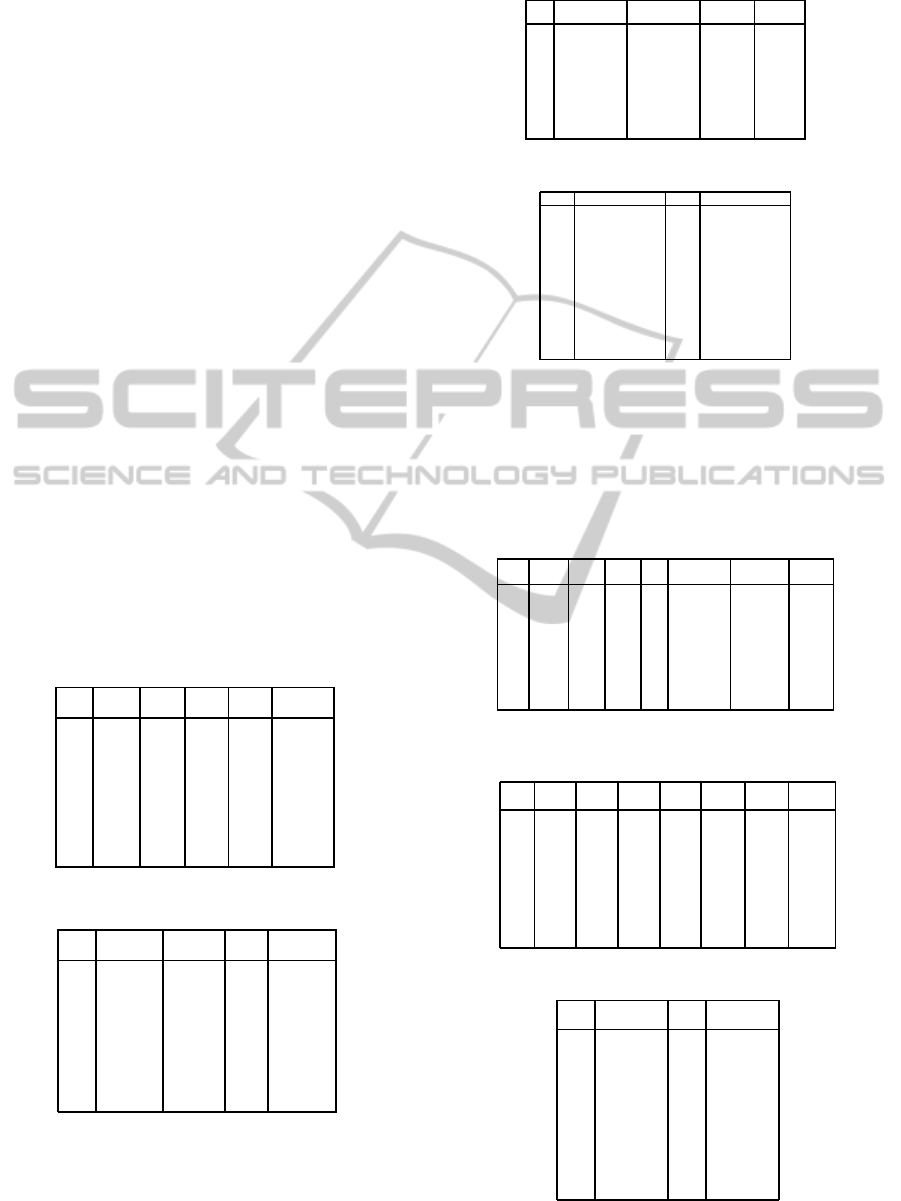
APPENDIX A: DATA OF THE CASE
STUDY 1
For more details see (Sawaragiet al., 1985; Yamashita
et al., 2010).
Table 4: Generation constraints in case study 1.
Unit Ymax
j
Ymin
j
T
on
min,j
T
off
min,j
Ramp rate
(MW) (MW) (h) (h) (MW/h)
1 455 150 8 8 250
2 455 150 8 8 250
3 130 20 5 5 80
4 130 20 5 5 80
5 162 25 6 6 100
6 80 20 3 3 80
7 85 25 3 3 85
8 55 10 1 1 55
9 55 10 1 1 55
10 55 10 1 1 55
Table 5: Data fuel costs evaluation in case study 1.
Unit A
j
B
j
C
j
startup cost
($/MW
2
h) ($/MWh) ($/h) ($)
1 0.000528 17.809 1100 4950
2 0.000341 18.986 1067 5500
3 0.0022 18.26 770 605
4 0.002321 18.15 748 616
5 0.004378 21.67 495 990
6 0.007832 24.486 407 187
7 0.000869 30.514 528 286
8 0.004543 28.512 726 33
9 0.002442 29.997 731.5 33
10 0.001903 30.569 737 33
Table 6: Data fuel costs evaluation in case study 1.
Unit a
j
b
j
c
j
startupCO
2
(t −CO
2
/MW
2
h) (t−CO
2
//MWh) (t −CO
2
/h) (t −CO
2
)
1 2.240E-05 0.7557 46.677 210.0
2 1.446E-05 0.8056 45.276 233.3
3 9.335E-05 0.7748 32.674 25.67
4 9.848E-05 0.7701 31.740 26.13
5 3.197E-05 0.1582 3.6157 7.231
6 5.720E-05 0.1788 2.9729 1.365
7 7.282E-05 0.2557 4.4248 2.396
8 3.807E-05 0.2389 6.0841 0.2765
9 2.046E-05 0.2513 6.1302 0.2765
10 1.594E-05 0.2561 6.1763 0.2765
Table 7: Load demand (MW) in case study 1.
Hour Load demand (MW) Hour Load demand (MW)
1 700 13 1400
2 750 14 1300
3 850 15 1200
4 950 16 1050
5 1000 17 1000
6 1100 18 1100
7 1372 19 1200
8 1314 20 1400
9 1271 21 1300
10 1400 22 1100
11 1450 23 900
12 1500 24 800
APPENDIX B: DATA OF THE CASE
STUDY 2.
For more details see (Winter et al., 2003).
Table 8: Data fuel costs evaluation in case study 2.
Unit Ymax
j
T
on
min,j
T
off
min,j
I
s
A
j
B
j
C
j
(MW) (h) (h) (h) (m.u./MW
2
) (m.u./MW) (m.u.)
1 520 8 4 -5 0.0085 19.566 4437.2
2 320 5 2 -6 0.0050 20.927 1044.20
3 280 5 2 3 0.0253 18.995 1236.9
4 200 5 2 -3 0.0091 23.107 416.58
5 150 5 3 -7 0.0106 20.765 485.69
6 150 4 2 3 0.0116 22.251 300.86
7 120 4 2 5 0.0212 15.031 315.44
8 100 4 2 1 0.0254 15.031 262.87
9 80 3 1 -1 0.0356 10.375 222.16
10 60 3 1 -1 0.0454 9.9214 159.33
Table 9: Start-up costs, shut down costs and NO
x
emissions
coefficients in case study 2.
Unit a
j
b
j
c
j
SD
j
D
j
E
j
F
j
(m.u.) (m.u.) (m.u.) (m.u.)
1 267 34.75 0.09 75 -0.245 154.16 -1154.6
2 187 38.62 0.13 70 -0.002 16.414 -691.1
3 176 27.57 0.15 42 -0.069 36.931 -1626
4 227 26.64 0.11 62 0.1313 -20.77 1885.6
5 113 18.64 0.18 29 -0.005 16.287 -321.4
6 282 45.48 0.09 49 0.1686 -20.0 1361.8
7 94 10.65 0.18 32 0.016 1.7774 276.59
8 114 22.57 0.20 40 0.0193 1.7774 230.49
9 101 20.59 0.20 25 -1.793 246.71 -2636
10 85 20.59 0.20 15 -2.286 235.92 -1890
Table 10: Load demand (MW) in case study 2.
Hour Load demand Hour Load demand
(MW) (MW)
1 1459 13 1154
2 1372 14 1138
3 1299 15 1124
4 1280 16 1095
5 1271 17 1066
6 1314 18 1037
7 1372 19 993
8 1314 20 978
9 1271 21 963
10 1242 22 1022
11 1197 23 1081
12 1182 24 1459
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
72
