
APPLICATION OF MATHEMATICAL TRANSFORM
IN DETECTION ALGORITHMS
Lyubka A. Doukovska
Institute of Information and Communication Technologies, Bulgarian Academy of Sciences
Acad. G. Bonchev str., bl. 2, 1113, Sofia, Bulgaria
doukovska@iit.bas.bg
Keywords: Hough transform, Radar detector, Target detection, Parameter estimation, Probability of detection, Constant
false alarm rate.
Abstract: Recent trends in the design of highly efficient and fully automated systems for processing radar data in
terms of a priori uncertainty about the targets and disturbances are causing the researchers to use the latest
achievements in the design of real time computing architectures for optimum realization and high
performance. The development of new algorithms that can be used to retrieve information about targets,
applying a mathematical transformation on the received signals yielding estimates of the parameters of
moving targets with extremely high precision in a dynamically changing radar environment is a new and
very promising direction in modern information and communication technologies. This article discusses
such an approach applying the Hough transform to determine the coordinates of the targets. The approach
uses a finite set of preselected patterns of the target movement. The Hough transform, translates the set of
measurements received in the space of patterns. Association to one or another specific pattern is done
estimating the information about the coordinates extracted from the received signals. Thus the moving target
parameters in the surveillance zone are uniquely determined by the parameters of the pattern.
1 INTRODUCTION
In the recent years development of modern highly
effective algorithms with optimal statistic
characteristics for real time radiolocation data
processing is becoming a very actual scientific task.
Nowadays algorithms that extract information about
target’s behavior through mathematical
transformation of the signals reflected from a target,
find ever-widening practical application. Applying
signal transformation allows for higher accuracy of
the estimated moving target parameters in dynamic
radiolocation environment. That is why development
of new robust and reliable algorithms for
simultaneous trajectory and target detection applying
the Hough transform is a perspective field of
research, so the present paper considers this
problem. The performance of original Hough
detector structures maintaining constant false
trajectory detection probability in intensive
randomly arriving impulse interference environment
is studied. Estimated are the efficiency and quality
of the obtained algorithms for data streams with
different distribution lows of occurrence of impulse
interference. A comparative analysis of the
presented Hough detector structures is made. The
practical effect of the obtained results lies in the
possibility of development of radar signal processing
algorithms for automated systems of air traffic
control service.
On 18.Dec.1962 the American Patent Service
issued a patent 3,069,654 “Method and means for
recognizing complex patterns” on the name of Paul
V. C. Hough (Hough, 1962). The Hough transform
is a mathematical conversion, in which the task for
finding specific features of the processed image
consisting of points defined in the feature space is
transformed to a task for finding groups of points in
the parameter space. The Hough transform for
straight lines detection is a sub case of the Radon
transform which for the Euclidean two dimensional
space and arbitrary generalized function F(x, y) is as
follows:
D
dxdyyxyxFFRf
sincos,,
(1)
where
.
is the Dirac delta function defining the
integral on direction of a straight line defined by the
161
Doukovska L.
APPLICATION OF MATHEMATICAL TRANSFORM IN DETECTION ALGORITHMS.
DOI: 10.5220/0004459801610167
In Proceedings of the First International Symposium on Business Modeling and Software Design (BMSD 2011), pages 161-167
ISBN: 978-989-8425-68-3
Copyright
c
2011 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
equation:
sincos yx
.
Initially Hough transform proposed in (Hough,
1962) presents the straight lines from a two-
dimensional image in the features space (FS) with
incidence m and segment c from
cmxy
, where
x and y are the image coordinates and m and c are
the coordinates in parameter space (PS).
The parameter space is sampled to a set of
subspaces (accumulators). Each point of the input
image is projected onto a straight line with
coordinates (m, c). Accumulators through which this
line passes increase their content by one. Each of
these accumulators corresponds to an area in the
features space and the presence of a peak in the
accumulator corresponds to a straight line or a
segment of the image. Lines existing in the features
space are detected according to the value
accumulated into an accumulator in the parameter
space. Hough transform proves to be a major tool in
the analysis and algorithms for pattern recognition.
The concept of using the Hough transform for
target detection improvement is introduced in
(Carlson, Evans and Wilson, 1994). Regardless of
the particular application of the Hough transform,
different authors point three of its main properties
that make it applicable to moving targets detection:
- Applicable for raster images;
- Applicable for fuzzy images processing;
- Effective when there is a lack of necessary
information (measurements, observations).
2 HOUGH TRANSFORM FOR
MOVING TARGET
DETECTION
Let us consider the operation of surveillance radar
which measures the distance, targets azimuth,
elevation and Doppler velocity as a function of time.
The sampling time is specified. Trajectory detection
by means of Hough transformation can be made
either having rotating antenna or phased array
(Carlson, Evans and Wilson, 1994). In a single
resolution cell in azimuth the traditional radars emit
several pulses on a specified carrier frequency. The
surveillance area is being consequently scanned with
the radar antenna pointing in different directions.
This procedure is repeated on successive periods of
time equal to the sampling time. In each “azimuth-
distance” resolution cell the station processes non-
coherent accumulation of the emitted pulses. The
target is considered detected if the pulse amplitude
in the (azimuth-distance) resolution cell exceeds a
preset threshold. This approach has some difficulties
to detect fast moving targets, because these objects
move quickly from one to another resolution cell
during one sampling period.
If received by the radar echo signals are arranged
as discrete multidimensional array, i.e. discrete
information card (with 5 dimensions - distance,
azimuth, elevation, Doppler velocity and time), the
target will appear as a curve, which intensity
depends on the power level of the echo signals. If
this curve can be monitored, it contains all the
accumulated information about the target and
complete history of its trajectory. Object with
constant radial velocity appears as a straight line.
The projection of this 5-dimensional information
about distance and time is a convenient way to
display the curve, while no interest in the other three
levels for this target. The result is a so-called “range
– time” (r-t) space.
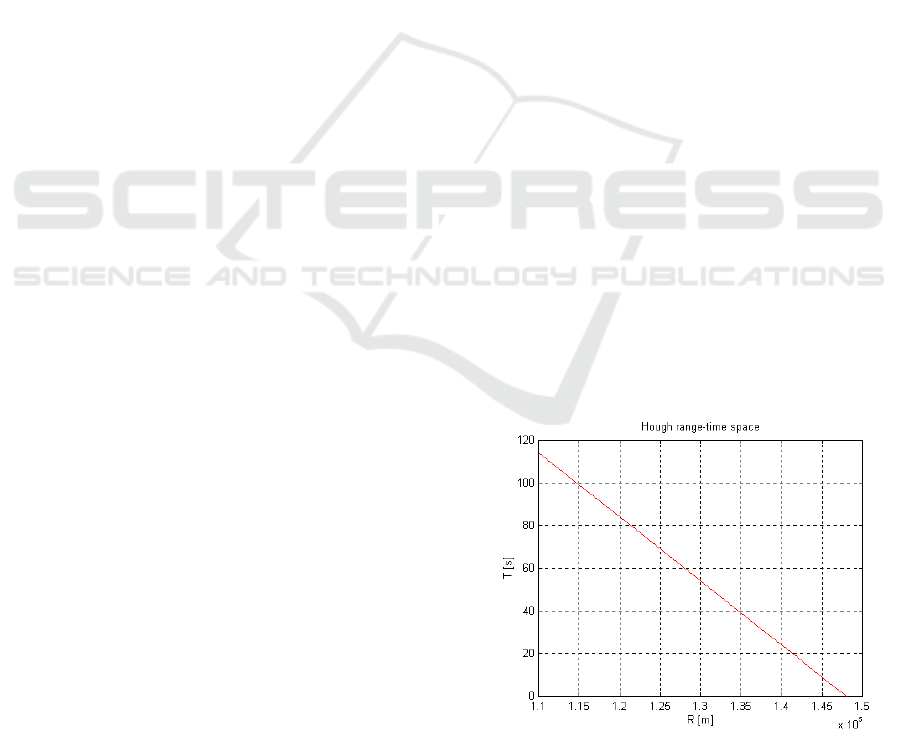
Figure 1 shows (r-t) space of a target with a
constant radial velocity, with given direction of the
antenna beam to a specified resolution cell of the
Doppler velocity. The slope of this line is
determined by the radial velocity of the target. The
trajectory of a stationary object will appear as a
vertical line. All moving objects will have a certain
angle, reaching zero for the fastest objects.
Time axis starts from zero to maximum. It is
convenient to present the information about the past
to a decent level, because too old information is not
useful. The current information contains the
disturbance, which is an internal white noise of the
receiver. It has Rayleigh amplitude distribution and
is summed in each cell of (r-t) space. The problem is
to find a straight line on the background of the noise.
Figure 1: “Range-time” space.
The Hough transform is a method detecting
curve elements, often used to detect location lines on
BMSD 2011 - First International Symposium on Business Modeling and Software Design
162
the noise background. Other forms of trajectories
can be also detected, but so far only straight lines
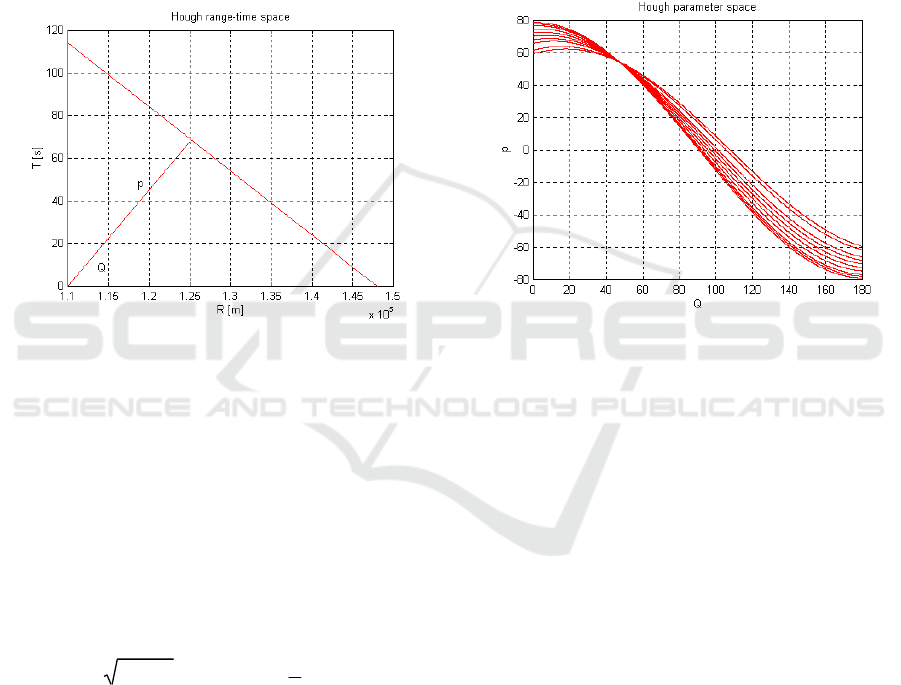
have been investigated.Figure 2 shows several data
points that form a straight line in the “range – time”
space. In polar coordinates, a straight line can be
accurately defined by two parameters:
1.
- the angle between the perpendicular from the
coordinate system origin in (r-t) space to the straight
line and the abscissa axis;
2.
- length of the perpendicular, i.e. the distance
between the coordinates origin in (r-t) space and the
line.
Figure 2: Relation between “range-time” (r-t) space and
Hough transform.
The Hough transform translates the points from
(r-t) information space to (-) or Hough parameter
space using the following expression:
sincos tr
(2)
where r and t are coordinates in the (r-t) space.
The Q grid in Hough space is formed by
consequent change of
angle form 0 to 180 and
calculating the corresponding
. Sometimes another
form of the Hough transform is used:
t
r
arctgtr
sin
22
(3)
The transform results in a sinusoid with phase and
amplitude defined by the (r-t) value of the
information point. The maximal
value is equal to
the length of the diagonal in the (r-t) space. The
transformation according (2) is shown on Figure 3.
Each point in (-) space corresponds to a separate
straight line in (r-t) space defined by the values of
and
. Each sinusoid presents a set of possible
straight lines through the point. If there are points
forming a straight line in the (r-t) space this
corresponds to an intersection point of set of
sinusoids in the Hough space. The (r-t) space is
sampled to cells which number is equal to the
number of the distance resolution elements and the
sample numbers. The primary threshold is used for
signal detection in each (r-t) cell. When the signal
value in a specified (r-t) cell exceeds the primary
threshold, its power gets added to the (-) cell
being intersected by the corresponding sinusoid in
the Hough space. Thus the value of an accumulator
cell in the intersection of several sinusoids will
become higher.
Figure 3: Hough parameter space.
The secondary threshold applied to each cell in
the parameter space may declare straight line
trajectory detection. This is the accumulated for
several scans moving target echo signal. The
and
parameters of the tracked straight line trajectory in
Hough space might be transformed back to the (r-t)
space indicating the current object position.
Transition from (r-t) to parameter space is being
made by means of a simple matrix manipulation.
Matrix D contains I number of elements where the
signal value exceeding the primary threshold.
I
I
t
r
t
r
t
r
D
...
...
2
2
1
1
(4)
Transformation matrix H consists of sinusoids and
cosinusoids from (2) defined as:
SS
NN
H
cos
...
cos
cos
sin
...
sin
sin
2
1
2
1
(5)
where
are discrete values of Q from 0 to 180,
obtained during the sizing of the parameter space.
APPLICATION OF MATHEMATICAL TRANSFORM IN DETECTION ALGORITHMS
163

The product of Н and D is a matrix R of size
(N
S
I), which contains the corresponding
values.
The indices of the
elements in matrix R are the
indices of the points in (r-t) space where the primary
threshold has been exceeded.
SS
NIN
I
HDR
,...,
.
.
.
.
.
.
.
.
.
,...,
1
111
(6)
Each column or the R matrix contains the
values
for one sinusoid on the parameter space. It is plain to
see the more points in (r-t) space exceed the primary
threshold the bigger D and R will be. The result is
increasing number of calculations. The size of
matrix H depends only on the parameter space
sampling.
The advantage of the Hough transform
application is the simultaneous target and its
trajectory detection. The target is considered
detected when its straight line trajectory is localized
in the Hough space, i.e.
and
parameters. When
applying the Hough transform additional non-
coherent integration of the signal obtained in several
consequent scans is done. This signal integration for
fast moving targets increases the detection
probability compared to the conventional radars. In
the recent years the Hough transform finds wide
application in moving targets detection (Carlson,
Evans and Wilson, 1994). This is a new and
perspective direction of the Hough transform
application and the results presented in (Kabakchiev,
Doukovska, Garvanov, 2005, Doukovska, 2007,
Doukovska 2007, Doukovska, 2008, Doukovska
2008, Doukovska, 2010) are dedicated to this
problem.
3 TARGET DETECTION SIGNAL
MODEL
The radar receives signal, noise and randomly
arriving impulse interference. In the present paper a
Swerling II target signal model is used. This model
is a package of echo signals with Rayleigh
distribution, reflected from a fast moving target. The
noise is a stationary and internal for the receiver.
The noise has normal distribution law which
corresponds to a Rayleigh distribution of the
envelope. Distribution function of the envelope of
the signal and the noise and the corresponding
density are
xF
s1
and
xf
s1
. If there is there is a
possibility for randomly arriving impulse
interference (RAII) -
0
е , (Poisson stream) the radar
resolution cells are filled with signal, noise and RAII
(Akimov, P., F. Evstratov, S. Zaharov, 1989). The
function and density distribution of the envelope in
this case are
xF
s2
and
xf
s2
.
The overall distribution function of the above
described case is obtained taking into account the
probability of absence of RAII is
0
1 e
and for
presence of RAII - (e
0
) respectively. Now the
distribution function of the envelope is (Akimov, P.,
F. Evstratov, S. Zaharov, 1989):
xFexFexF
sssP 2010
1
(7)
The distribution density function is:
xfexfexf
sssP 2010
1
(8)
Here it is assumed that the probability of RAII
appearing in a resolution cell is an infinitely small
quantity compared to the probability of single
impulse occurrence. This is a typical feature for a
Poisson stream.
When the duration of the impulse disturbance is
not negligible compared to the average period of
recurrence (high probability for RAII), a binomial
model of the stream distribution is used. In this case
the distribution function of the envelope
is (Akimov,
P., F. Evstratov, S. Zaharov, 1989):
xFexFeexFexF
ssssB 3
2
21
2
121
(9)
For the distribution density of the envelope we have:
xfexfeexfexf
ssssB 3
2
21
2
121
(10)
where
xF
s3
and
xf
s3
- are function and
distribution density of the signal, the noise and two
pulse interferences.
In the presented paper it is assumed that the
distribution of the signal plus noise and the mixture
of signal, noise and RAII after the quadratic detector
have an exponential density (Akimov, P., F.
Evstratov, S. Zaharov, 1989):
s
x
s
xf
s
1
exp
1
1
00
1
(11)
jj
s
rs
x
rs
xf
1
exp
1
1
00
2
(12)
where s is the average value of the signal to noise
ratio. In this case the probability density function for
BMSD 2011 - First International Symposium on Business Modeling and Software Design
164
Poisson distribution model of the RAII has the
following expression (Bird J., 1982) – see (8):
jj
sP
rs
x
rs
e
s
x
s
e
xf
1
exp
1
1
exp
1
1
00
0
00
0
(13)
For high probability of RAII, when the model is
binomial the noise density distribution function is
used as well as two pulse interferences:
jj
s
rs
x
rs
xf
21
exp
21
1
00
3
(14)
In this case the probability density function for
binomial distribution of the RAII – see (10) is:
jj
jj
sB
rs
x
rs
e
rs
x
rs
ee
s
x
s
e
xf
21
exp
21
1
exp
1
12
1
exp
1
1
00
2
00
00
2
(15)
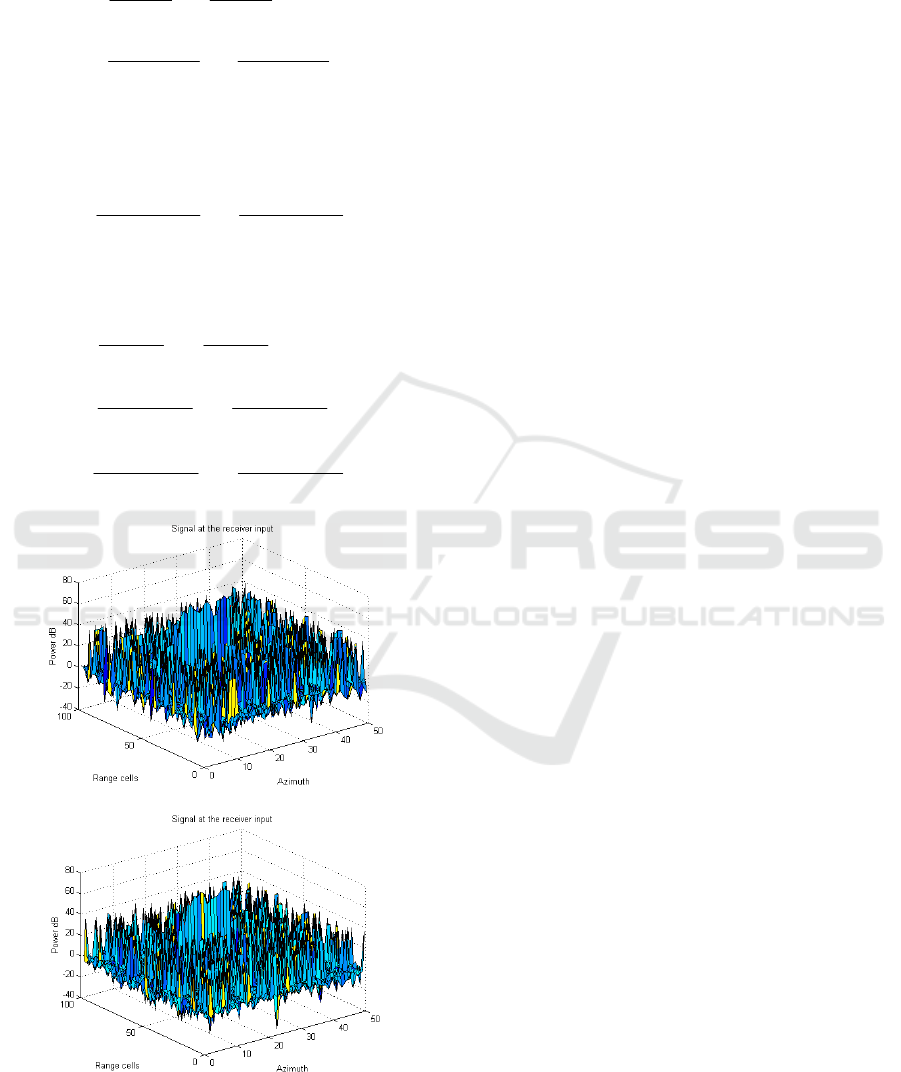
a) Poisson RAII model
b) Binomial RAII model
Figure 4: Radar resolution cell filled with signal (s=70dB),
noise (
0
=1) and impulse interference (INR=30dB,
e
0
=0.1).
Figure 4 shows the two streams – a) Poisson and
b) Binomial. The cells that do not contain useful
signal are filled with receiver internal noise and
impulse interference. The cells containing signal are
filled according (13) and (15). The results are
obtained for: average receiver noise level
0
=1,
signal to noise ratio - s=70dB, impulse interference
to noise ratio - INR=30dB and probability for RAII
0.1 for both distributions.
4 EXPERIMENTAL RESULTS
Recently a lot of robust moving target detection
algorithms for processing signals from noisy
environments are developed. As a result a bank of
Hough detectors making use of one and two
dimensional signal processors was created
(Kabakchiev, Doukovska, Garvanov, 2005,
Doukovska, 2007, Doukovska 2007, Doukovska,
2008, Doukovska 2008, Doukovska, 2010). All
these structures have been analytically studied and
by means statistical analysis has been compared to
each other as well as to results obtained by other
authors (Carlson B., E. Evans, S. Wilson, 1994). On
Figure 5 is presented the overall structure scheme of
an adaptive to the environmental conditions detector.
It consists of two main modules – signal processor
and Hough detector. Maintaining constant false
alarm rates at the detector’s output depends on the
chosen scalar factor (T
) of the CFAR signal
processor. The system input signal reflected from
the target is filtered with a simple sinusoidal signal
(complex signal compression), then it enters the
quadratic detector where the signal matrix of the
receiver is generated. This signal matrix is fed to the
CFAR processor. As a result at the output a binary
signal matrix is generated containing zeros and ones
presenting absence or presence of a signal in a given
radar resolution cell. The binary matrix is visualized
on the plot extractor. Results are stored in the so
called target coordinates record determined by the i-
th radar observation. For several consecutive scans
an interscan gathering of the plots of the target is
done. Then the (r-t) space is formed and using the
already processed data the trajectory is being
determined. The Hough transform is applied over
the points from the (r-t) space in order to transfer
them to the Hough space. As a result there is a
bunch of sinusoids which intersection point
accumulates the energy reflected from the target.
Comparing the value accumulated in this point (sum
of zeros and ones) to a preliminary chosen threshold
is the way to detect a target if the radar range resolu-
APPLICATION OF MATHEMATICAL TRANSFORM IN DETECTION ALGORITHMS
165
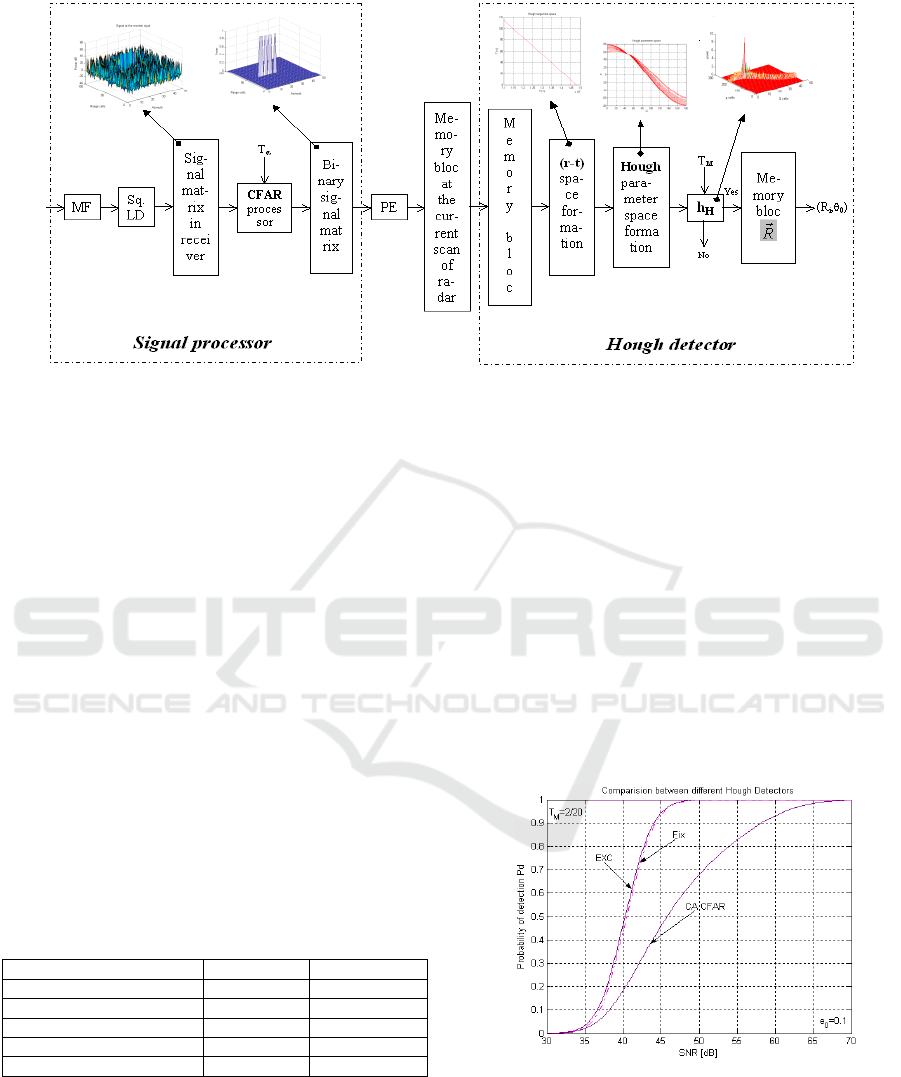
Figure 5: Generalized Hough detector structure.
tion cell. It the result is positive a reverse Hough
transform is applied in order to determine the
distance to the target for a given azimuth.
Presented paper considers the results obtained
from the analysis of different Hough detectors with
one and two dimensional signal processors
maintaining constant false alarm rates. To make the
results applicable they were compared in equal
conditions using equal criteria. The efficiency of the
Hough transform application was estimated by the
profit, gained during the detection process,
expressed by the signal to noise ratio as per the
criterion presented in (Rohling H., 1983).
Choosing the appropriate threshold constants
assures good detection results even for low values of
the SNR (Doukovska, 2010). Table 1 presents the
obtained threshold constants in equal experimental
conditions for the different detection structures and
different values of the binary rule in the Hough
parameter space.
Table 1: Threshold constants for different Hough
detectors.
Hough detectors T
M
=2/20 T
M
=T
M
o
p
t.
/20
CA Hough CFAR 672 1.186
EXC Hough CFAR 21880 3.225
Hough CFAR BI 0.000494 0.0000858
EXC Hough CFAR BI 1.1285 0.3161
API Hough CFAR 7.5 1.535
For comparison are shown the achieved results
for the detection probability of different Hough
detector structures, calculated for non optimal and
optimal values of binary rule in Hough parameter
space - T
M
= T
Mopt
/20, for following environment
parameter values - average power of the receiver
noise λ
0
=1, average interference-to-noise ratio (INR)
r
j
=30dB, probability for the appearance of impulse
interference with average length e
0
=0.1, N=16, L=16
and for probability of false alarm P
FA
=10
-4
.
The results presented in this paper are obtained
after statistical analysis of the Hough detectors
detection probability in intensive noise environment
with very high probability for randomly arriving
impulse interference. Different Hough detector
structures with one and two dimensional CFAR
signal processors are studied.
All analytical conclusions necessary to convey
the experiments are considered in details in
(Kabakchiev, Doukovska, Garvanov, 2005,
Doukovska, 2007, Doukovska 2007, Doukovska,
2008, Doukovska 2008, Doukovska, 2010).
Figure 6: Probability characteristics of a Hough detector
with one dimensional signal processors - cell averaging
CFAR (CA CFAR), excision CFAR processor (EXC
CFAR) and with fixed threshold, for RAII probability - e
0
.
It was shown that application of a binary CFAR
processor significantly increases the detection
quality (about 30dB) compared to the fixed
BMSD 2011 - First International Symposium on Business Modeling and Software Design
166
threshold algorithm (Doukovska, 2007). Analyzed is
a Hough detector with a more efficient structure of
the two dimensional CFAR processor with excision
censoring procedure in the reference window (EXC
CFAR BI). The hypothesis that censoring techniques
increase the detection efficiency with about 5dB was
confirmed (Doukovska, 2008).
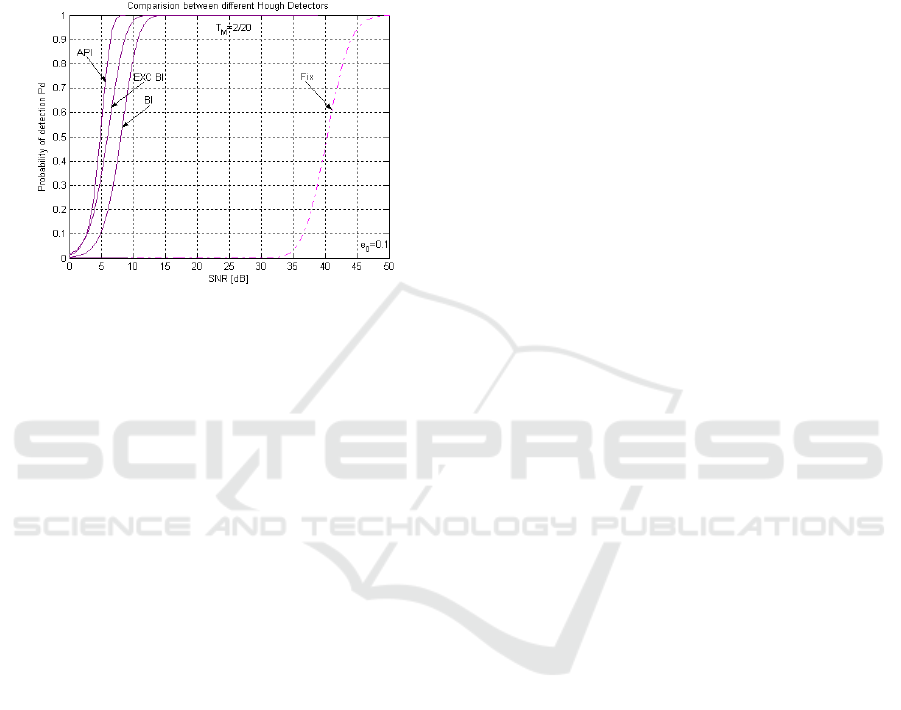
Figure 7: Probability characteristics of a Hough detector
with two dimensional signal processors - adaptive CFAR
processor (API CFAR), excision binary CFAR processor
(EXC CFAR BI), binary CFAR processor (BI CFAR) and
with fixed threshold, for RAII probability - e
0
.
The most effective for noisy environment with
high probability for randomly arriving impulse
interference is the Hough detector with adaptive non
coherent CFAR signal processor (API CFAR). This
structure is by 37dB more effective than the one
with fixed threshold Hough detector (Doukovska,
2007).
5 CONCLUSIONS
In conventional signal detection approach the
process of target detection is separate from its
trajectory detection. Unlike this wide spread
technique Hough transform application allows for
simultaneous target and trajectory detection. To
detect a trajectory data from several consecutive
radar scans is processed.
The presented paper considers the results
obtained by the proposed adaptive threshold
determination procedure and analysis of different
Hough detector structures in intensive RAII
environment. The need of an adequate threshold
analysis procedure allowing better detection results
for low values of the SNR is considered.
The obtained results are applicable for wide
range of tasks like synthesis of radiolocation
detectors, communication systems, medicine and
other systems making use of infrared, ultrasonic and
other sensor types.
ACKNOWLEDGEMENTS
The investigations in this work are within the frame
of Project “Formation of Highly Qualified Young
Researchers in Information Technologies for
Optimization, Pattern Recognition and Decision
Support Systems”, Contract with the Ministry of
Education, Youth and Science: BG051PO001-
3.3.04/40/28.08.2009.
REFERENCES
Hough P. V. C., Method and means for recognizing
complex patterns, US Patent - 3,069,654, 18.XII.1962.
Carlson B., E. Evans, S. Wilson, Search Radar Detection
and Track with the Hough Transform, Parts I, II, III,
IEEE Trans., Vol. AES-30, pp. 102-124, 1994.
Akimov P., F. Evstratov, S. Zaharov, Radio Signal
Detection, Radio and Communication, Moscow, pp.
195-203, 1989 (in Russian).
Bird J., Calculating detection probabilities for systems
employing non coherent integration, IEEE Trans., vol.
AES-18, № 4, July, pp. 401-409, 1982.
Kabakchiev Chr., L. Doukovska, I. Garvanov, Hough
Radar Detectors in Conditions of Intensive Pulse
Jamming, Sensors & Transducers Magazine (S&T e-
Didest), Special Issue (ISSN 1726-5479),
“Multisensor Data and Information Processing”, №8,
pp. 381-389, 2005.
Doukovska L., Hough Detector with Binary Integration
Signal Processor, Comptes rendus de l’Academie
bulgare des Sciences, vol. 60, №5, pp. 525-533, 2007.
Doukovska L., Moving Target Hough Detector in
Randomly Arriving Impulse Interference, Cybernetics
and Information Technologies, vol. 7, №3, pp. 55-72,
2007.
Doukovska L., Hough Target Detectors with Small Values
of SNR, NATO Advanced Study Institute
“Unexploded Ordnance Detection and Mitigation”,
Poster presentation, Il Ciocco, Italy, 2008,
http://www.prometheus-inc.com/asi/uxo2008/
Doukovska L., Hough Moving Target Detector with Fixed
Threshold, Comptes rendus de l’Academie bulgare des
Sciences, vol. 61, №11, ISSN: 0861-1459, pp. 1459-
1466, 2008.
Doukovska L., Adaptive Hough Detector Threshold
Analysis in Presence of Randomly Arriving Impulse
Interference, Proc. of the International Radar
Symposium – IRS’10, Vilnius, Lithuania, pp. 142-147,
2010.
Rohling H., Radar CFAR thresholding in clutter and
multiple target situation, IEEE Trans., vol. AES-19, 4,
pp. 608-621, 1983.
APPLICATION OF MATHEMATICAL TRANSFORM IN DETECTION ALGORITHMS
167
