
MICRO/NANO-MANIPULATORS WITH STRUCTURED PIEZO
CERAMIC ACTUATORS
R. Kasper
1
, M. Al-Wahab
1
, K. Kostadinov
2
and T. Tiankov
2
1
Institute of Mobile Systems, Otto-von-Guercke University, 2 University Square, Magdeburg, Germany
2
Institute of Mechanics, Bulgarian Academy of Sciences, Acad. G. Bonchev Str., bl. 4, 1113, Sofia, Bulgaria
Keywords: Structured piezo-ceramics, Micro, Nano, Manipulators.
Abstract: This paper presents an investigation and development of mechatronic handling devices (MHD) based on a
structured piezo ceramic with (3, 1)-piezoelectric effect for manipulation and processing of micro/nano
operations. Following the synthesis of kinematic structure for micro- and nano-manipulation tasks based on
structured piezo ceramics and closed kinematic structures, a specific multilayer design of piezo actuated
MHD for micro-and nano-operations was developed. The MHD was mathematically modelled and a FE–
model was created and simulated with the program system ANSYS. Comparison study of the MHD
prototypes was performed using obtained experimental results. An experimental set up was created that
aimed to verify the mathematical and simulation models measuring system behaviour like force,
displacement and stiffness.
1 INTRODUCTION
Micro and nano manipulators are used in different
fields; e.g. in micro assembly, medicine, genetics,
cellular biology technology, chemistry, investigation
of thin films, atomic force microscopes (AFM) and
scanning tunnelling microscopes (STM).
There are known micromanipulators with piezo
actuators (Kortschack, 2005; Albut, 2003; Klocke,
1998). PZT actuators offer substantial advantages
for biological cell manipulation such as large force,
high frequency and a small size of displacement
(Patentschrift Hoerbiger Fluidtechnik, 1993; Lubitz,
2000). Other application fields involve typical
manipulations such as cell penetration, cell sorting
and moving or treating microorganisms. Critical
issues in this case are speed of cell penetration,
optimal stroke for penetration or operation,
orientation of the end-effector, working space, and
size of the device itself.
The increasing requirements of high precision
equipment in the fields above perform a broad
spectrum of handling and manipulation tasks which
is a prerequisite for searching for new concepts of
investigation of piezo-actuated mechatronic
handling devices.
Utilizing the technological capacity for rapid
prototyping of mechatronic systems based on the
piezo-structured ceramics, and the improvement of
such systems is a prerequisite for the development of
technology for manufacturing of mechatronic
handling devices (MHD) that are able to perform a
certain user-requested micro- or nano-operation. The
past general use of piezo-actuators in a direction of
motion (3, 3 or 3, 1) is to be extended for realization
of piezo-structures for the operation tasks (Kasper,
2006; Kasper, 2004; Chakarov, 2006).
By structuring ceramics as well as stacking and
combining them with further elements, more piezo-
actuators axis motions are subjected for
development. To produce movement parameters by
combining various possibilities of structuring with
appropriate servo-mechanism, which is currently
realisable with very complex and large systems, is a
promising design approach (Bar-Itzhack, 2000;
Kostadinov, 2006; Kostadinov, 2005) for which the
following four parameters are significant for
determination of the reference task function of any
mechatronic handling device:
The first parameter is the stroke. The desired
goal is an adjustment of the stroke of approximately
100 μm in all 3 directions X, Y and Z.
The second parameter is the force. It is well-
known that stack actuators produce forces within the
kN range, and bending transducers deliver forces up
to 1 N. Neither stack actuators, nor bending
242
Kasper R., Al-Wahab M., Kostadinov K. and Tiankov T..
MICRO/NANO-MANIPULATORS WITH STRUCTURED PIEZO CERAMIC ACTUATORS.
DOI: 10.5220/0003539202420247
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 242-247
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
transducers are here optimally suitable. The
possibilities of structuring piezo ceramics with
consideration of the generation of the stroke can be
helpful in this case. Therefore, it is possible to
optimize stroke and force in one design.
The third parameter is the size. The actuator for
the generation of movement must be integrated into
the MHD. The building area is limited. Thus, both
piezo plates and piezo disks can be used as raw
material. The characteristics of piezo materials are to
be selected in such a way that reaches desired
parameters for stroke and force.
The fourth parameter is the load speed. The
structure of the piezo ceramic must be designed in
such a way that the desired dynamics of the
movement can be achieved. The intended speeds lie
within the range of approximately 200μm/ms.
Thereby, an optimization is necessary in this case
too. Emphasis is the joint action of piezo ceramic
and servo-mechanism system. The servo-mechanism
system has to be adapted to the desired parameters
for stroke and force.
2 CLOSED KINEMATIC
STRUCTURES BASED
ON PIEZO CERAMICS
Piezo-structured ceramics, MHD using piezo stack
actuators and single ceramic actuators could be
assumed by the mechanism and machine theory as a
mechanism with closed kinematic structures. The
polarized ceramic elements, piezo stack actuators
and single ceramic actuators can be estimated as
actuators for linear motion, which can be modelled
by the kinematic chain as shown in Figure1 (Kasper,
2004, Chakarov, 2006).
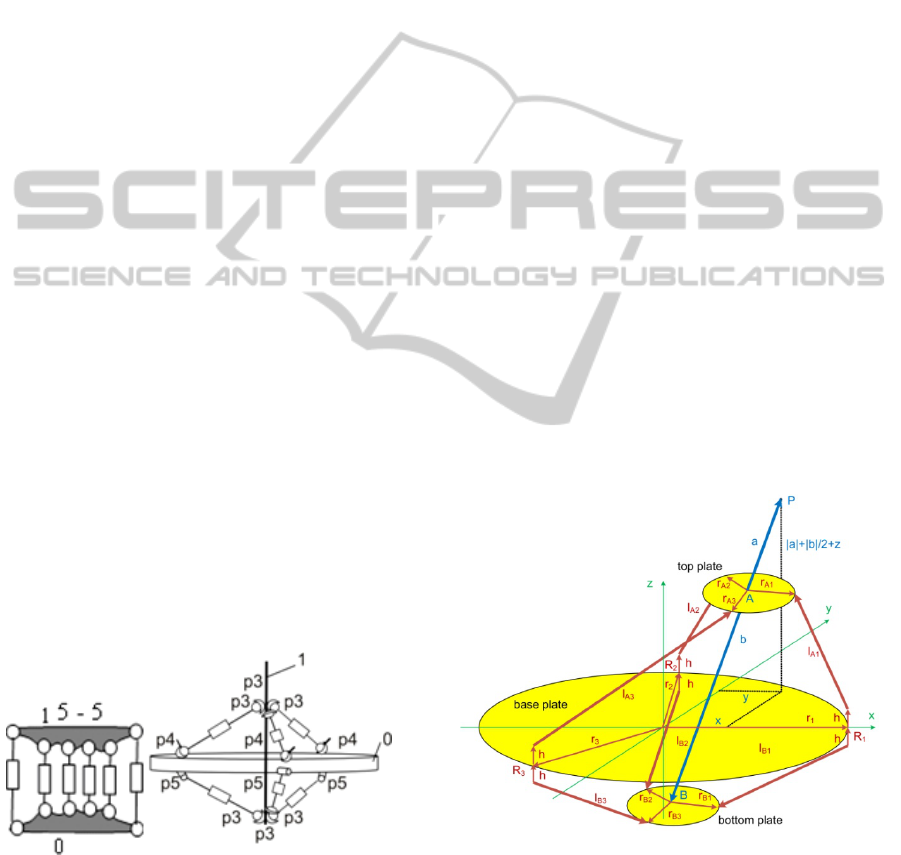
Figure 1: Kinematic scheme of MHD.
MHD for micro- and nano-manipulation tasks
shown in figure 1 is characterized with 3 degrees of
freedom (DOF) and 6 piezo actuators. The double
sided system is built from a base plate with three
piezo actuators on each side which are arranged at
an angle of 120° using spherical joints.
3 MATHEMATICAL
MODELLING OF A MHD
FOR MICRO AND NANO
APPLICATION
Following the synthesis of the kinematic structure,
the design of a double sided MHD based on
structured piezo actuators with integrated
displacement amplifier was mathematically
modelled and calculated.
Starting from the kinematic scheme given in
Figure 1 a mechanical model of the MHD shown in
Figure 2 was built taking into account relevant
constraints resulting from construction and
manufacturing. On each side of a fixed circular base
plate, 3 piezo-actuators are connected with a ball
joint in a vertical distance h from points R
1÷3
located
in XY-plane at a distance R from the origin.
Vectors
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
−
=
0
))1(3/2cos(
))1.(3/2sin(
. k
k
Rr
k
π
π
G
for k=1÷3 (1)
from origin to point R
1÷3
are symmetrically
distributed at angles .
Figure 2: Mechanical Model of the MHD.
The pointer of the MHD is fixed at point B of
bottom plate and led through point A of top plate to
the TCP defined by point P. Vectors r
A1÷A3
at top
plate and r
B1÷B3
at bottom plate are constructed
similar to vectors r
1÷3
at base plate with r the radius
of top and bottom plate.The pointer can be split into
MICRO/NANO-MANIPULATORS WITH STRUCTURED PIEZO CERAMIC ACTUATORS
243

two vectors
ABb =
G
and
APa =
G
with fixed length
aa
G
=
and
bb
G
=
. Using Cardan angles φ, ψ and θ
the orientation of the pointer, top and bottom plate is
defined by the rotation matrix T(φ, ψ,
θ)=T
X
(φ).T
Y
(ψ).T
Z
(θ) built by elementary rotations
T
X
(φ), T
Y
(ψ) and T
Z
(θ) of X, Y and Z-axis
(Chakarov, 2006). Coordinates of the TCP are given
by
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
++
=
zba
y
x
P
2/
K
(2)
where x and y are absolute coordinates and z defines
the difference to the zero position, when there are no
rotations and bottom and top plate have a distance of
b/2 to the base plate. Vectors defining the position
and orientation of the piezo-actuators are given by
kAkAk
rhraPl
G
G
GG
G
G
−−+−=
for k=1÷3
for the upper ones and
kBkBk
rhrbaPl
G
G
G
G
G
G
G
−+++−=
for k=1÷3
for the lower ones. As a result of the construction,
actuators are joined to the base plate in a vertical
distance h, leading to
Z
ehh .=
G
, with
Z
e
G
the unit
vector in Z-direction. Modelling a piezo-actuator as
a massless elastic bar, its force at the end points can
be written as:
lllllcF /)..(
0
G
G
Δ+−= . (3)
For each actuator
l
G
has to be replaced by its
individual vector
31÷A
l or
31÷B
l respectively. From
geometry, the forceless length of all actuators is
))()2/((
22
0
rRhbl −+−= (4)
The spring constant c of each actuator can be
approximated by c=A.E/l
0
with the actuator’s
elasticity module E and sectional area A. The
elongation Δl=(A.d
31
/l
0
).U is driven by the control
voltage U, with piezoelectric constant d
31
, which is
negative for the 3,1 effect utilized in this application.
In the control system, voltages U
1
, U
2
and U
3
of the
upper actuators can be driven individually, whereas
only one voltage U
Z
is used to control the 3 lower
actuators. To calculate the 3 actual position
coordinates x, y and z as well as the 3 orientation
angles φ, ψ and θ the principle of equilibrium of
forces
∑
=
=++=Δ
3
1
0)(
k
TCPBkAk
FFFF (5)
and torques
∑
=
=×+×+=Δ
3
1
0))((
k
TCPBkBk
FaFrbM
G
G
(6)
are used. Here
TCP
F
is external force acting at the
TCP. These 6 equations can be solved e.g.
numerically by minimizing the square of the
residuals
MinMF →Δ+Δ
22
(7)
using LSSOLVE method from Maple’s optimization
package. To achieve residuals of 10
-12
and below,
less than a second of computation time is needed
starting from pointer’s zero position as initial values.
Thus, computational speed is high enough to use this
model to adapt geometric and material data of the
MHD to fulfil the design goals. The resulting
parameters are given in Table 1:
Table 1: MHD geometric and material parameters.
Parameters free to improve design goals
A a B E
37.5mm² 49.5mm 10.5mm 80kN/mm²
Parameters fixed by construction
R h R d
31
40mm 4mm 7.5mm 18e-8
4 FEM-SIMULATIONS OF A
MHD FOR MICRO- AND
NANO-MANIPULATION
TASKS BASED ON
STRUCTURED PIEZO
CERAMICS AND CLOSED
KINEMATIC STRUCTURE
FE-model of MHD for micro- and nano-
manipulators based on the kinematic scheme with 3
DoF shown in Figure 2 was created and simulated.
The FE-model is presented in Figure 3. The system
is pre-strained within itself. That gives the
possibility for 3D motion on the end effector and
makes the joints free from backslash. Applying the
same control voltage to 3 actuators in the bottom; a
movement with 90° to the basic surface (Z-axis) can
be reached. If a different control voltage on the other
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
244
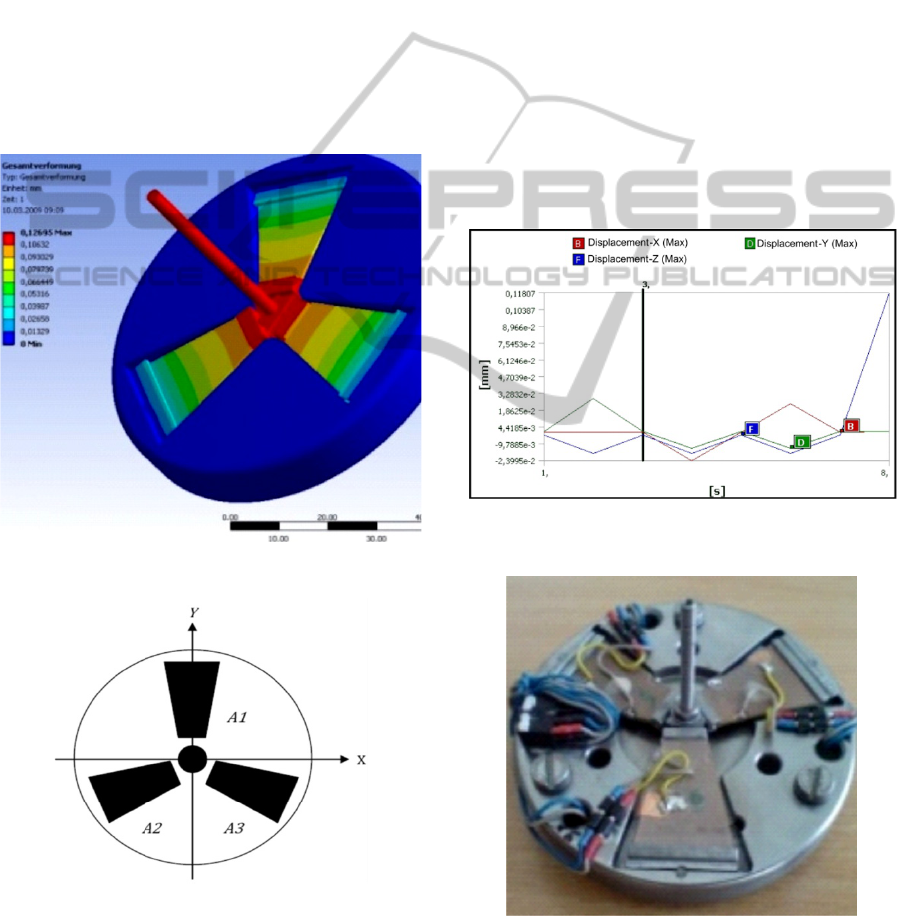
three actuators is applied, it is possible to get
movements on X, Y and Z directions. The
arrangements of the actuators are seen in Figure 4.
The results given in Figure 5 are calculated in FE
simulation for PZT with a thickness of 1.5 mm. FE-
models built up using ANSYS allow the coupled
treatment of mechanical and piezo-electrical effects.
Attention has been paid on nonlinear effects in
geometry of the motion amplification system and its
connection elements to the piezo-ceramic base plate.
At the first step, the actuator (A1) was charged and
discharged at a voltage of 800 V.
The second and third steps were when charging
and discharging the actuators (A2) and (A3) in a
similar way. The fourth step was applying the same
control voltage to the bottom three actuators (A456).
Figure 3: Double-sided MHD FE-model.
Figure 4: Arrangement of the upper Piezo-actuators A1,
A2 and A3 of the Double-sided MHD.
A movement perpendicular to the basic surface
(Z-axis) was then reached. The results of the FE
method are given in the figure below.
As expected, we get a displacement in Z
direction around 130 µm and a force of 100 N is
generated.
Co-operating all 3 actuators with different linear
extension, it is possible to permit an exact
positioning of the end effector in the work space.
5 STUDY AND DESIGN
OF THE DEVELOPED
PROTOTYPES OF MHDS
To verify the mathematical and the FE- models, a
prototype of MHD for micro- & nano-manipulators
based on the kinematic scheme in Figure 1 was
developed. The steel plate (left top Figure 6) has an
immovable base which is connected by spherical
joints to the actuating lever.
Figure 5: FE Simulation Results of the Double-sided
MHD.
Figure 6: MHDs Prototype.
The necessary operating voltage is determined by
the actuator’s thickness. To reduce it, the actuator
MICRO/NANO-MANIPULATORS WITH STRUCTURED PIEZO CERAMIC ACTUATORS
245
can be produced from several layers. In our case the
prototype has been developed from Piezo plate (3, 1
effect) with thickness equal to 0.5 mm. Every
actuator has 3 layers where a control with max.1000
V is necessary. Finally, a prototype was designed
and manufactured (Figure6).
An experimental set-up based on digital
microscopy and software application (Shulev, 2010)
for the prototype’s control was used for the
experimental investigation.
The experiments were taken analogously to the
simulations with the Maple and FEM models. As a
scanning, a point on the top of the end-effector is
chosen. The experiments were performed with a
microscope and camera visualization.
The motion of the scanning point has been
studied separately along each axis according to the
control equation below.
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
Z
zzzz
yyy
xx
U
U
U
U
U U U U
U U U
U U
Z
Y
X
3
2
1
4321
321
22
0
00
(8)
Pictures of the probe were taken after each step
of changing the control voltage in order to determine
the displacement in the X, Y and Z direction. Since
the scanning point is actuated by Piezo-elements
with open-loop control system, it is of great
importance to know the specific behaviour of each
piezo element and the motion characteristic.
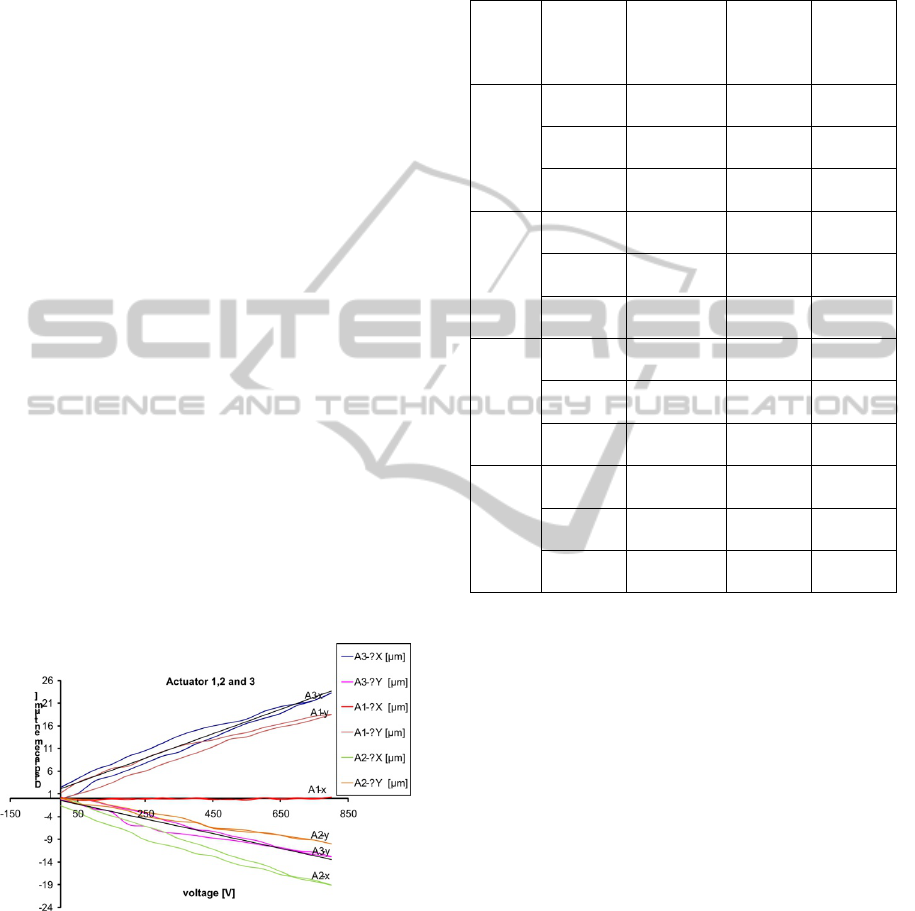
Figure 7: Experimental Results of the Double-sided MHD.
Therefore, an experimental result was obtained
from each one. The FEM model was solved with the
obtained piezo motions that are in the range of 0 to 9
μm. The dynamic frequency and repeatability of the
developed system are under investigation as well.
The results are given in Figure 7.
The experimental results were summarized and
compared with the simulated and mathematically
calculated data. The summarized results are given in
the table 2.
Table 2: Summarized Results.
Step
[B]
Displace-
ment
X [µm]
[D]
Displace-
ment
Y [µm]
[F]
Displace
ment
Z [µm]
1-
A1
Maple
31 0 -18
FEM
28 =0 -18
Exp.
Results
18 0 -
2-
A2
Maple
-16 27 -18
FEM
-13 24 -18
Exp.
Results
-10 19 -
3-
A3
Maple
-16 -27 -23
FEM
-13 -24 -18
Exp.
Results
-13 -23 -
4-
(A456)
Maple
0 0 119
FEM
0 0 118
Exp.
Results
- - 110
The differences between measurements,
calculations and FEM were due to inaccuracies in
the production of the individual elements and in the
measurements, as well as the deviation of the real
MHD prototype from the adopted mathematical and
FEM models. However, it has been proven that the
prototype showed very similar data in the
experimental tests.
6 CONCLUSIONS
The development of mechatronic handling devices
(MHD) based on a structured piezo ceramic with (3,
1)-piezoelectric effect for manipulation and
processing of micro/nano operations was
investigated. Following the synthesis of kinematic
structure for micro- and nano-manipulation tasks
based on structured piezo ceramics and closed
kinematic structures, a specific multilayer design of
piezo actuated mechatronic handling devices for
micro-and nano-operations was developed. The
system was mathematically modelled, and a FE–
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
246

model was created and simulated with the program
system ANSYS.
A comparison study of the mechatronic handling
device prototypes was performed using obtained
experimental results. An experimental set-up was
used specially created for investigation of such
micro robots.
The mathematical and simulation models were
verified, as well as the system of its behaviour
(force, displacement and stiffness). It has been
proven that the prototype showed very similar data
in the experimental tests to the theoretical data.
ACKNOWLEDGEMENTS
The authors gratefully acknowledge the partially
support through the projects:
MeCHa-PiCS project funded by the DFG under
the contract KA-2 “Mechatronic handling devices
based on piezo-ceramic structures for micro- and
nano-applications” and
SpeCy-MiNT project funded by Bulgarian
Science Fund under the Contract Nr. DO
0171/16.12.2008 “Specialized Mechatronic Systems
for Micro and NanoTechnology”.
REFERENCES
Kortschack, A, Shirinov A., Trüper T., Fatikow S., 2005.
“Development of mobile versatile nanohandling
microrobots: design, driving principles, haptic
control”. In Journal Robotica, vol. 23, pp.419 – 434.
Albut, A., Zhou, Q. et al., 2003. “Development of Flexible
Force-Controlled Piezo-Bimorph Micro-gripping
System”. In Proceedings of 2nd VDE World
Microtechnologies Congress, MICRO.tec 2003,
Munich, Germany, pp:507-512, October 13-15.
Klocke V., 1998. “Nanotechnik, Motionfrom the
Nanoscale World”. In CD-ROM Version 1.5.
Patentschrift Hoerbiger Fluidtechnik GmbH, Piezo-Ventil,
AT 396392 B, 25.8 (1993).
Lubitz, K. Schuh, C. et al., 2000. „Properties and
Reliability of large PZT multilayer actuators”. In
ACTUATOR 2000, 7th International Conference on
New Actuators, Bremen, Germany, pp: 58-61.
Kasper, R., Al-Wahab, M., 2004. “Mechanically
Structured Piezoelectric Actuators”. In ACTUATOR
2004, 9
th
International Conference on New Actuators,
Bremen, Germany, pp: 68-71.
Kasper R., Al-Wahab M., Kostadinov, K., Chakarov D.,
W. Heinemann, 2004. “Mechatronic handling device
based on piezo ceramic structures for micro and nano
applications”. In 10
th
International Conference on New
Actuators, Bremen, Germany, pp: 154-158.
Chakarov D. et al., 2006. “Kinematics model of
nonholonomic wheeled mobile robots for mobile
manipulation tasks”. In The Proceedings of the
International Conference on bionics and prosthetics,
biomechanics and mechanics, mechatronics and
robotics, Bulgaria-Varna.
Bar-Itzhack, Itzhack Y., 2000. “New method for
extracting the quaternion from a rotation matrix”. In
AIAA Journal of Guidance, Control and Dynamics 23
(6):1085–1087(Engineering Note) doi:10.2514/2.4654
Kostadinov K., Kasper R., Tiankov T., Al-Wahab M.,
Chakarov D., Gotseva D., 2006. “Unified Approach
For Functional Task Formulation in Domain of
Micro/Nano Handling Operations”. In W. Menz and
St. Dimov (Eds.), 4M2005 Second Int. conference on
Multi- Material Micro Manufacture (Grenoble,
20.09.-22.09.2006), Elsevier, pp. 255-258.
Kostadinov K. Gr., Ionescu F., Hradynarski R., Tiankov
T., 2005. „Robot based assembly and processing
micro/nano operations”. In W. Menz and St. Dimov
(Eds.), 4M2005 First International conference on
Multi- Material Micro Manufacture (Karlsruhe,
29.06.-01.07.2005), Elsevier, pp.295-298.
Shulev A., T. Tiankov, M. Al-Wahab, I. Roussev, R.
Kasper, K. Kostadinov, 2010. “Optical approach for
positioning control of handling devices for micro-
manipulations”. In Ed.: E. Djukendjiev -
“Proceedings of the 7
th
Int. Conference on bionics and
prosthetics, biomechanics and mechanics,
mechatronics and robotics”, (ICBMM), ISBN 978-
9934-10-027-7, pp. 62-65.
MICRO/NANO-MANIPULATORS WITH STRUCTURED PIEZO CERAMIC ACTUATORS
247
