
MICROSSB: A LIGHTWEIGHT FRAMEWORK FOR ON-LINE
DISTRIBUTED APPLICATION BASED ON SOFT SYSTEM BUS
Jian Xiao, Jizhou Sun, Gang Li, Chun Li, Sen Li
Department of Software Engineering, TianJin University, Tian Jin, China
Jingde Cheng
Department of Information and Computer Sciences, Saitama University, Saitama, Japan
Keywords: Persistent Computing, Soft system bus, Software development methodology, Middleware, On-line
distributed application.
Abstract: Software development based on Soft System Bus (SSB) is a novel approach to Software Engineering. From
the viewpoint of SSB, this paper presents a lightweight framework for developing on-line distributed
applications, called MicroSSB. The framework partly implements the core functions of SSB-based system,
including communication channel, data-instruction station, message exchange, security check and dynamic
component management etc. The paper also proposes a guideline for using MicroSSB. By using MicroSSB,
the designers and developers of distributed applications can focus on the core of their product instead of
struggling with the low-level distributed programming. As case studies, the paper also shows two real
applications based on MicroSSB: an experimental collaborative decision making system for air traffic flow
control and a marine emergency commanding system.
1 INTRODUCTION
Modern society is more and more dependent on
various on-line distributed systems such as air/train
traffic control systems, emergency commanding
systems, various collaborative systems and process
control systems etc, and therefore how to design,
develop and maintain these large-scale on-line
distributed systems has become a very important
issue in modern software engineering. Most modern
on-line distributed applications have some essential
requirements:
ER1: high availability and reliability
ER2: robust transmission mechanism
ER3: unified but flexible message exchange
ER4: loose component coupling
ER5: scalability for both small and large scale
Though many large distributed systems are
developed by putting some traditional middleware
solutions together, the main problem is that there is
not a unified methodology on how to use traditional
middlewares together, in other words, most
traditional middlewares cannot severely satisfy the
above requirements and simple assembly of the
middlewares could not ensure persistent availability.
On the other hand, software development based
on Soft System Bus (SSB) is a novel approach to
Software Engineering, and it provides a new
methodology for design, development and
maintenance of distributed systems (J. Cheng, 2005).
A system built using this methodology is called Soft
System Bus Based System (SSBBS).
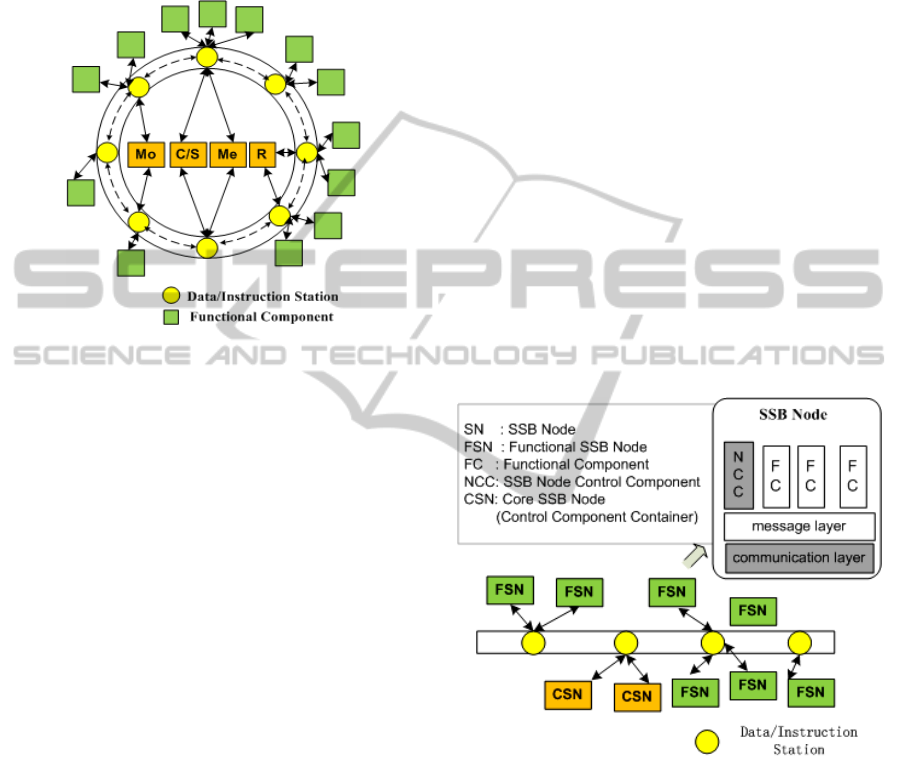
SSB-based system (Fig.1) consists of a number
of components and one or more SSBs. The
components are connected to the SSB. An SSB is a
communication channel used to provide hardware
and platform independent middleware support to the
components. It conveys the data/instructions from
component to component, provides language
independent unified interface to the components and
preserves the data/instructions if the destination
component is not connected to the SSB.
There are two types of components in an SSBBS:
one or more general purpose permanent Control
Components (CCs) and some application specific
Functional Components (FCs). Based on runtime
information, the CCs record, measure, monitor and
control the FCs in some way. On the other hand, the
211
Xiao J., Sun J., Li G., Li C., Li S. and Cheng J..
MICROSSB: A LIGHTWEIGHT FRAMEWORK FOR ON-LINE DISTRIBUTED APPLICATION BASED ON SOFT SYSTEM BUS.
DOI: 10.5220/0003421502110217
In Proceedings of the 6th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE-2011), pages 211-217
ISBN: 978-989-8425-57-7
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
FCs, which provide functionalities to the
application, are developed by the application
developers. In an SSBBS, any two components are
not allowed to communicate directly. They must use
the unified interface of the SSB to interact with each
other (J. Cheng, 2006).
Figure 1: Circular SSB structure.
Our ultimate purpose is to build the general
purpose part of SSBBSs, i.e., the SSB and CCs
which is collectively called SSB package. The SSB
package will be used to build large-scale long-lived
distributed systems, and the application developers’
responsibility is to develop the FCs and to attach
them to the SSB (J. Cheng, 2007). Till now
no SSB
has been fully implemented,
in this paper we will
present a micro implementation of SSB package,
called MicroSSB, which can provide core functions
of SSBBSs with some limitations, as well as our
experience in bring SSB approach to practice of one
real application.
2 MICROSSB ARCHITECTURE
MicroSSB (Fig.2) provides a simple pragmatic
approach for using SSB model, and it is designed to
meet the general requirements of several different
classes of on-line distributed application. Fig.2
shows the architecture of MicroSSB, all the critical
control components and functional components are
connected by a linear communication channel, and
resident in several SSBNodes, a common run-time
environment. There are two types of SSBNode, FSN
(functional component node) and CSN (control
component node), and the only difference between
FSN and CSN is that the CSNs are invisible and
inaccessible to any end-user.
SSBNode is the container of control components
or functional components, and it controls the life-
cycle of components. Only through SSBNode can
the components connect to data/instruction stations
for sending and receiving messages. There are four
main parts within an SSBNode:
Communication Layer: provides common
functions of message transmission and several
configurable policies to support various transmission
requirements.
Message Layer: defines a uniform format of
message (data and instructions) based on xml, and
provides a flexible mechanism for message
processing and permission check.
Node Control Component: each SSBNode has
only one node control component, designed for
performing some management task, e.g., initializing
the run time environment of this node and restarting
dead functional components etc.
Functional Components: application-specific,
and they may be redundant for high availability.
Functional components within one SSBNode share
the same run time environment and resources.
Figure 2: MicroSSB linear bidirectional structure.
2.1 Communication Layer
The implementation of communication channel is
based on ActiveMQ (Apache, 2008), which has
similar functions with SSB’s data/instruction station.
ActiveMQ’s broker provides a series of excellent
mechanisms for message preservation, re-
transportation, security, failover, disaster recovery
etc. Fig.3 shows the structure of communication
layer. Data/instruction station’s core part is MQ
broker, which provides a fast and reliable
transactional message preservation solution by
ENASE 2011 - 6th International Conference on Evaluation of Novel Software Approaches to Software Engineering
212
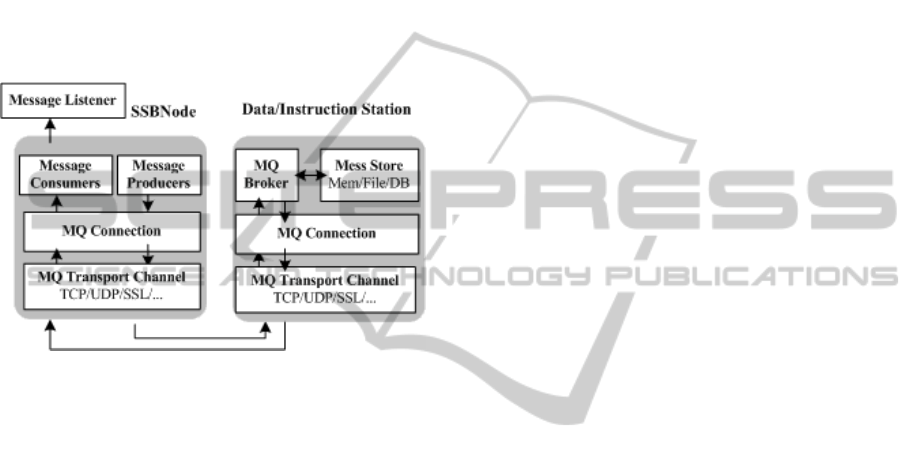
persisting messages in a transactional journal or a
database. Multiple brokers can work in cluster mode
that means when one station fails, another station
could quickly takeover all the SSB nodes connected
to the failure one. Transport channel can support
several protocols and communication libraries, and
furthermore developers can create their own
interceptor for marshalling/unmarshalling messages
in order to meet various messaging requirements.
Message consumers and producers are used to
receive and send messages; a listener is assigned to
fetch incoming messages and forward them to the
message layer (Fig.4).
Figure 3: Communication layer structure.
The communication layer is high configurable, to
establish a communication channel quickly, the
developers almost needn't do any program coding
except some configurations. For example, using the
following configuration fragment, some
communication channels can be automatically
established when SSBNode starts.
<channel>
<id>MicroSSB_CSN01</id>
<station>
tcp://localhost:61616
</station>
<publisher
name="csn01_publisher"
topic="instruction_topic" />
<producer
name="csn01_producer" queue="" />
<consumer
name="fsn_consumer"
queue="csn01_queue"
dispatcher="default"
newThread="true"
filter="SSB_Me_Info"/>
</channel>
The above configuration fragment comes from the
configuration file of a CSN, and at the beginning, it
defines a unique id for the SSBNode, and the
station tag indicates the connection URL to the
SSB station (MQ broker) which the SSBNode will
connect to. The follow content defines a message
publisher for publishing general instruction or data,
and a message producer for sending message to any
one SSBNode. Finally a message consumer is
assigned for receiving the incoming messages, the
newThread attribute indicates that a new thread
will be created and dedicated to the consumer in
order to improve the efficiency of message
processing, and further more a filter is applied to
insure that only the messages of system measure
could be picked up for further processing.
2.2 Message Layer
From the view of distributed application, a message
(data/instruction) represents an operation issued
from message producer to message consumer(s), and
the component which receives the message should
know how to process it. From the view of software
design, a message should include some basic
attributes such as sender id, sending time, receiver
id, receiving time, message id/name and body
content etc. In high security environment some real-
time check mechanisms must be provided to forbid
illegal accesses before further processing.
MicroSSB’s message is defined in xml format.
<microSSB-message>
<header>
<id>the serial num</id>
<name>
unique name for this type message
</name>
<source>
the source SSBNode
</source>
<destination>
the destination SSBNode
</destination>
<replyTo>
only for request-response model
</replyTo>
<sendTime>timestamp</sendTime>
<recvTime>timestamp</recvTime>
</header>
<data>
application-specific data
</data>
</microSSB-message>
It is worth noting that though the message
processing is scheduled and invoked by message
layer but only the component (message consumer)
can know when and how to process it, thus here
needs an extensible mechanism for developers to
MICROSSB: A LIGHTWEIGHT FRAMEWORK FOR ON-LINE DISTRIBUTED APPLICATION BASED ON SOFT
SYSTEM BUS
213
customize and implement the various application-
specific messages and its processors. MicroSSB
defines a message processor mapping mechanism
for automatic message processing and security
checking. Message processor contains a fragment
of codes which can be invoked to deal with the
corresponding messages. In order to meet the
various needs of different applications, message
layer uses various processor invocation methods
and processors chain to support high extensibility.
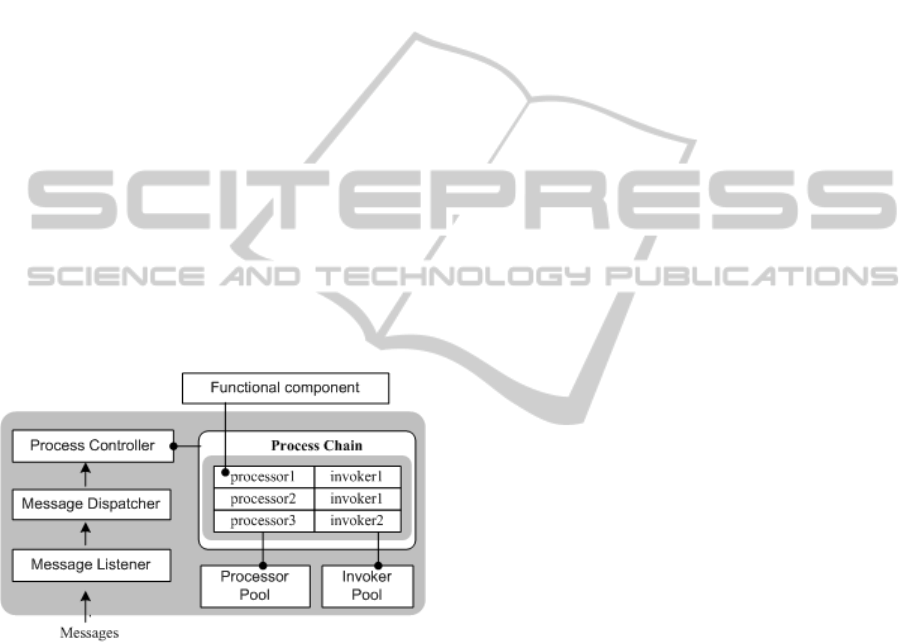
Fig.4 shows the structure of message layer and the
main message processing flow:
1) Message layer registers message listeners in
communication layer
2) When the message listener detects an incoming
message it passes the message to a message
dispatcher immediately
3) The dispatcher passes the message to an assigned
security checker
3.1) If the message is legal, it will be forward to
the process controller and then a series of
processors will be invoked to deal with the
message in a predefined order.
3.2) If the message is illegal, the dispatcher
simply discards it.
Figure 4: Message layer structure.
Processor Invoker is used to control when and
how to invoke a message processor into running.
Consider the following scenarios: in GUI
applications it is a good practice to allocate a
separate or a background thread to do time-
consuming calculations asynchronously in order to
keep the GUI system responsive to the end users.
The invokers give the developers more flexibility in
customizing message processor invocation policies
and developing their own invokers
.
Processor chain is useful when the same
message need to be processed by a series of
processors in a predefined flow. For example, a
message which contains instruction from the
central control component may need to be forward
to all the functional components in an SSBNode
and be processed sequentially by the processors of
each functional component. Generally these
processors assigned to process the same message
may not know each other at all, and in a different
deployment environment some processors may be
removed from or added into the processor chain.
The process controller works like a mini work
flow engine, manage all the processor chains in
the SSBNode and control all processing flows.
Run Time Security Check can be easily
implemented in the MicroSSB’s message driven
architecture. Similar with the message processor
mapping, there is a mapping list for messages and
security checkers, and the checkers is scheduled by
message layer before message processors invoked.
Developers also can easily implement application-
specific security checkers.
As shown in the following configuration
fragment, message processing mechanisms and
flows can be configured easily.
<messages>
<message
name="LoginResponse"
processor="LoginProcessor"
invoker=”synInvoker”/>
</messages>
<processors>
<processor
name="LoginProcessor"
class="microssb.LoginProcessor>
<chain
name="success"
forward="ClientInitProcessor/>
<chain
name="failure"
forward="ErrorProcessor"/>
</processor>
</processors>
For performance reasons, the processor pool and
invoker pool are used for reducing the overload of
frequently creating and destroying objects and the
security check result can also be cached to avoid
some performance lost by frequent security check.
2.3 Component Design
According to the architecture of MicroSSB, the
components in one SSBNode share common running
environment, communication layer and message
layer. MicroSSB defines a unified interface for all
the central control components and functional
components, including most common operations for
dynamic component management, e.g., loading,
ENASE 2011 - 6th International Conference on Evaluation of Novel Software Approaches to Software Engineering
214
initializing, reactivating, suspending, stopping and
unloading component.
The central control components can be regarded
as the “heart” and/or “brain” of the system, and
should never die, that is persistently continuous
functioning. All the functional components are
measured, recorded, monitored and controlled by the
central control components. There are three major
control components in MicroSSB (Fig.1, Fig.2):
1) System monitor: collects and display the run
time status data, and can be regarded as a simple
combination of the central measurer (Mo) and
the central monitor (Me).
2) Component manager: manages the whole life
cycle of all functional components, partially
implements the controller/scheduler(C/S).
3) Data manager: partially implements the central
recorder(R), provides the common interfaces for
caching and storing data on run time. It plays a
critical role in failover and disaster recovery.
The functional components are application-
specific, and according to SSB’s architecture they
can be redundant, and each SSBNode can run same
or different components set. Because most common
functions are provided by MicroSSB, the design and
development of functional components become very
simple, and developers just need to implement core
functions of their product. Message transmitting,
processing and security check rules can be easily
defined in configuration files and automatically
scheduled by MicroSSB.
3 MICROSSB APPLICATONS
3.1 Development Guideline and Flow
MicroSSB can be regarded as a general-purpose
package of SSB model for on-line distributed
applications, and in order to construct a complete
SSB-based system, the system designers and
developers just need to follow some customizing
steps and add functional components to it. Suggested
steps as follows:
1) Divide functional components
2) Define message processing flows
3) Define content of the messages and their
operations (processors)
4) Select/develop proper processor invokers
5) Select/develop proper security checkers
6) Analyze the communication requirement for all
the different types of message, and assign proper
message producers and consumers
7) Program and write configuration file
8) Assemble relative components into one or more
SSBNodes
9) Deploy all the SSBNodes
3.2 Case Studies
A usage of on-line distributed system in air traffic
control is to facilitate remote users (traffic flow
control centers, airports, airline operation centers
etc.) collaboratively to adjust the fight plans (Kan
Chang et al, 2001) through multiple interaction
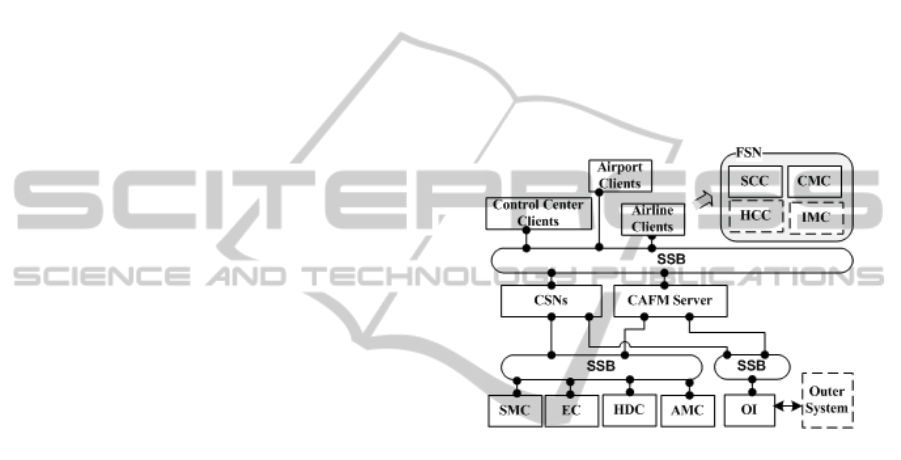
methods, such as text, graphic, audio etc. Fig.5
shows the architecture of the collaborative air traffic
flow management system (CAFM). Note that it is
just an auxiliary system for air traffic control, not for
real time flight controlling and scheduling.
Figure 5: The architecture of CAFM.
The main flows of analysis and design of the system
are as follows:
1) Functional components analysis: the system
consists of three groups of functional
components, i.e., user interface group (client),
server group and outer interface group.
1.1) Client group consists of session client
component (SCC), collaborative
modification component (CMC), historical
case client component (HCC), and instant
message component (IMC), and the last two
(dashed line box) are optional. Each client
has the same set of functional components,
but the users may have different permission
list, e.g., only the sponsor of a session can
activate, suspend or stop the session (A
session means the whole process of one
collaborative task).
1.2) Server group consists of a central server
component (CAFM Server) to coordinate all
the other functional components, session
management components (SMC) to deal
with current active session data, evaluation
MICROSSB: A LIGHTWEIGHT FRAMEWORK FOR ON-LINE DISTRIBUTED APPLICATION BASED ON SOFT
SYSTEM BUS
215
component (EC) to evaluate the decision
result, historical data component (HDC) to
manage all the historical cases and account
manage component (AMC) to deal with
users account data.
1.3) Outer interface group consists of just one
component (OI) to communicate with outer
system for fetching the original fight plans
and publishing the final adjusted plans.
2) The main processing flow analysis
2.1) The sponsor activate a session
2.2) All the users collaborative modify flight
plans through sending and receiving flight
plan updating messages
2.3) The sponsor submit the final modifications
2.4) The server calculating the evaluation result
2.5) If evaluation is good, the sponsor publish
the decision and close the session
2.6) If evaluation is not good, repeat 2.2-2.4
until obtain a good result
3) Messages definition:
Session message:
create/activate/suspend/stop/delete
Flight plan message:
modify/synchronize/submit/evaluate
Others:
user online/offline,
audio chat start/end, audio stream etc.
4) Message processing analysis: For all the
messages except evaluation of flight plans can be
processed in a short time, so the synchronous
message process invoker is proper. While
evaluation calculation is a time-consuming task,
so an asynchronous message process invoker is
proper.
5) Communication channels analysis: All the
messages except audio stream can be transmitted
in pure text (xml) format, thus for instant
message component (IMC), a stream-oriented
channel should be established temporarily
between two SSBNodes when an audio chat is
starting. And for all of the other components
within same SSBNode, one shared producer plus
one shared consumer is enough for sending and
receiving text messages.
6) Implementation: Both the MicroSSB and the
system are implemented by Java technology.
Deployment analysis: in order to provide high
security, we use three separate SSBs rather than only
one SSB to connect client group, server group and
outer interface group.
There also is a marine emergency commanding
system (MECS) based on MicroSSB and the goal of
the system is to aid relevant departments to process
accidents or rescue collaboratively on the sea. What
the biggest different from the above system is that
there are various functional clients and services,
most of which must run continuously and even more
make real-time responses, such as real time data
collectors, situation monitor, alarm manager,
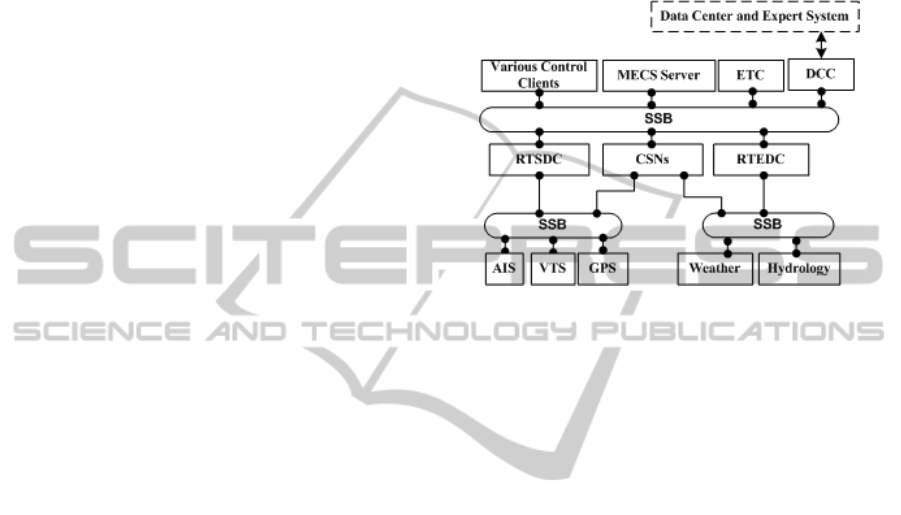
command center etc. Fig.6 shows the architecture of
the system.
Figure 6: The architecture of MECS.
The system consists of six groups of functional
components, i.e.
1) Real time ship data component (RTSDC),
collecting the ship information from various
sources, such as AIS (automatic identification
system), VTS (vessel traffic services) and GPS.
2) Real time environment data component
(RTEDC), collecting weather and hydrology
information.
3) Various control clients for receiving alarms,
situation monitor, and resource schedule etc.
4) data center component (DCC) for integrating
knowledge base and expert system
5) Server component for controlling the whole flow
of accident processing or rescue.
6) Electronic training component (ETC)
4 RELATED WORKS
There are some excellent remote control
infrastructures for distributed application monitoring
and management, such as Plush (Jeannie Albrecht et
al, 2007), group communication libraries for high
available message transmission over large-scale
network, such as JGroups (Bela Ban, 2007) and
dynamic module frameworks for adding, removing
and replacing any part of a system in runtime, such
as OSGi (Andre L.C. Tavares, Marco Tulio Valente,
2008).
Selim et al.(2006) presented a fully comparative
ENASE 2011 - 6th International Conference on Evaluation of Novel Software Approaches to Software Engineering
216

study between the SSB and different types of
traditional middlewares, e.g., Request/Response,
Message Oriented, Publish/Subscribe middlewares,
etc. and his paper shows that although existing
middlewares have some characteristics that are
common in an SSB too, they lack some features
which are unique and essential for an SSB,
especially in component coupling, dynamic
connectivity, data preservation, availability and
reliability, and unified interface etc.
The Open Services Gateway Initiative (OSGi) is
a framework that supports the implementation of
component-based, service-oriented applications in
Java. The framework manages the life-cycle of
modules and provides means to publish and search
for services. Moreover, it supports the dynamic
install and uninstall of bundles like an SSBBS. R-
OSGi extended the centralized, industry-standard
OSGi specification to support distributed module
management (J. S. Rellermeyer et al, 2007) and
further DR-OSGi enhanced distributed component
application with the ability to continue executing in
the presence of network volatility (Young-Woo
Kwon et al, 2009). However, SSBBS can also
provide fault tolerance to the components, and it can
ensure the components continuously functioning
through preserving the program states of the running
components attached to it, but OSGi is just simply to
restart the failure one without restore its states.
Furthermore, SSBBS provides a unified mechanism
to measure, monitor and control the Functional
Components automatically with minimum manual
intervention.
5 CONCLUSIONS
We have presented MicroSSB as a lightweight
framework of SSB package, and MicroSSB allows
application developers to build on-line distributed
applications using SSB methodology, and it provides
most basic functions of SSB, including
communication channel, data-instruction station,
message exchange, security check and dynamic
component management etc. We also proposed a
design and development flow for using MicroSSB.
As a case study, we have presented the whole
process of developing an experimental collaborative
decision making system for air traffic flow control
based on MicroSSB step by step, and our experience
has shown that by using it the application developers
can focus on the core of their products and just
develop the functional components and attach them
to the SSB, thus with minimum effort a distributed
system can be built.
However, at present the Soft System Bus
technology is not completely developed, and the
current MicroSSB, as one step towards bringing
SSB approach into practice, is just a prototype
implementation only including some basic features
of SSBBS, especially lacking a real sense of Control
Components group of SSB, thus at current stage it is
not suitable for some critical systems and very large-
scale applications.
REFERENCES
J. Cheng, 2005. ‘Connecting Components with Soft Syste
m Buses: A New Methodology for Design, Developm
ent, and Maintenance of Reconfigurable, Ubiquitous, a
nd Persistent Reactive Systems’, Proceedings of the 1
9th International Conference on Advanced Informatio
n Networking and Applications, vol. 1, pp. 667-672.
J. Cheng, 2006. ‘Persistent Computing Systems as Continu
ously Available, Reliable, and Secure Systems’, Proce
edings of the First International Conference on Availa
bility, Reliability and Security, pp. 631-638.
J. Cheng, 2007. ‘Persistent Computing Systems Based on
Soft System Buses as an Infrastructure of Ubiquitous
Computing and Intelligence’, Journal of Ubiquitous C
omputing and Intelligence, vol. 1, no. 1, pp. 35-41.
M. R. Selim, T. Endo, Y. Goto, and J. Cheng, 2006. ‘A Co
mparative Study between Soft System Bus and Traditi
onal Middlewares’, LNCS Vol.4278, pp. 1264-1273
Jeannie Albrecht, Ryan Braud, Darren Dao, Nikolay Topil
ski, Christopher Tuttle, Alex C. Snoeren, Amin Vahda
t, 2007. ‘Remote control: distributed application confi
guration, management, and visualization with Plush’.
Proceedings of the 21st conference on Large Installati
on System Administration Conference, pp.1-19.
Andre L.C. Tavares, Marco Tulio Valente, 2008. ‘A Gentl
e Introduction to OSGi’. ACM SIGSOFT Software E
ngineering Notes, vol.33, no.5.
J. S. Rellermeyer, G. Alonso, and T. Roscoe. 2007. ‘R-OS
Gi: Distributed applications through software modulari
zation’. Proceedings of the ACM/IFIP/USENIX 2007 I
nternational Conference on Middleware, pp.1-20.
Young-Woo Kwon, Eli Tilevich, Taweesup Apiwattanapo
ng, 2009. ‘DR-OSGi: Hardening Distributed Compone
nts with Network Volatility Resiliency’. Proceedings
of the 10th ACM/IFIP/USENIX International Conferen
ce on Middleware, LNCS vol.5896 pp.373-392
Kan Chang, Ken Howard, Rick Oiesen, Lara Shisler, Mido
ri Tanino, and Michael C. Wambsganss, 2001. ‘Enhan
cements to the FAA Ground-Delay Program Under Co
llaborative Decision Making’. Interfaces, vol.31, no.1,
pp.57-76
Apache, ActiveMQ, 2008), <http://activemq.apache.org>
Bela Ban, JGroups - A Toolkit for Reliable Multicast Com
munication (2007), http://www.jgroups.org/javagroups
new/docs/index.htmL
MICROSSB: A LIGHTWEIGHT FRAMEWORK FOR ON-LINE DISTRIBUTED APPLICATION BASED ON SOFT
SYSTEM BUS
217
