
AN EFFECTIVE METHOD FOR COUNTING PEOPLE IN
VIDEO-SURVEILLANCE APPLICATIONS
D. Conte, P. Foggia, G. Percannella, F. Tufano and M. Vento
Dipartimento di Ingegneria Elettronica e Ingegneria Informatica, University of Salerno
Via Ponte don Melillo, 1, 84084, Fisciano (SA), Italy
Keywords:
People counting, Crowd density estimation, Video surveillance.
Abstract:
This paper presents a method to count people for video surveillance applications. The proposed method adopts
the indirect approach, according to which the number of persons in the scene is inferred from the value of some
easily detectable scene features.
In particular, the proposed method first detects the SURF interest points associated to moving people, then
determines the number of persons in the scene by a weigthed sum of the SURF points. In order to take into
account the fact that, due to the perspective, the number of points per person tends to decrease the farther the
person is from the camera, the weight attributed to each point depends on its coordinates in the image plane.
In the design of the method, particular attention has been paid in order to obtain a system that can be easily
deployed and configured.
In the experimental evaluation, the method has been extensively compared with the algorithms by Albiol et al.
and by Conte et al., which both adopt a similar approach. The experimentations have been carried out on the
PETS 2009 dataset and the results show that the proposed method obtains a high value of the accuracy.
1 INTRODUCTION
The estimation of the number of people present in an
area can be an extremely useful information both for
security/safety reasons (for instance, an anomalous
change in number of persons could be the cause or
the effect of a dangerous event) and for economic pur-
poses (for instance, optimizing the schedule of pub-
lic transportation system on the basis of the number
of passengers). Hence, several works in the fields of
video analysis and intelligent video surveillance have
addressed this task.
The literature on people counting presents two
conceptually different ways to face this task. In
the direct approach (also called detection-based),
each person in the scene is individually detected, us-
ing some form of segmentation and object detec-
tion; the number of people is then trivially obtain-
able. In the indirect approach (also called map-based
or measurement-based), instead, the counting is per-
formed using the measurement of suitable features
that do not require the separate detection of each per-
son in the scene; these features then have to be put
somehow in relation to the number of people.
The direct approach has the advantage that peo-
ple detection is often already performed on a scene
for other purposes (e.g. detecting events based on a
person’s position or trajectory), and as long as people
are correctly segmented, the count is not affected by
perspective, different people densities and, to some
extent, partial occlusions. On the other hand, cor-
rect segmentation of people is a complex task by it-
self, and its output is often unreliable, especially in
crowded conditions (which are of primary interest for
people counting). The indirect approach instead is
more robust, since it is based on features that are sim-
pler to detect, but it is often not easy to find an ac-
curate correspondance between these features and the
number of people, especially if people may appear in
the scene at different distances from the camera, and
in groups with diverse densities.
Recent examples of the direct approach are
(Rittscher et al., 2005), (Brostow and Cipolla, 2006)
and (Zhao et al., 2008). For the indirect approach,
recent methods have proposed, among the others, the
use of measurements such as the amount of moving
pixels (Cho et al., 1999), blob size (Kong et al., 2006),
fractal dimension (Marana et al., 1999) or other tex-
ture features (Rahmalan et al., 2006). Some recent
methods following the indirect approach have been
67
Conte D., Foggia P., Percannella G., Tufano F. and Vento M..
AN EFFECTIVE METHOD FOR COUNTING PEOPLE IN VIDEO-SURVEILLANCE APPLICATIONS.
DOI: 10.5220/0003370400670074
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 67-74
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

proposed in (Albiol et al., 2009), in (Chan et al., 2008)
and in (Conte et al., 2010). All these methods have
been submitted to the PETS 2009 and 2010 contests
on people counting and have obtained very good per-
formance among the contests participants. In partic-
ular, in Albiol’s paper, the authors propose the use
of corner points detected using the Harris’ algorithm
(Harris and Stephens, 1988). Static corner points,
likely belonging to the background, are removed by
computing motion vectors between adjacent frames.
Finally, the number of people is estimated from the
number of moving corner points assuming a direct
proportionality relation.
Although Albiol’s method has proved to be quite
more robust than its competitors, its accuracy is lim-
ited by the fact that it does not take into account per-
spective effects, nor the influence of people density
on the detection of corner points. Moreover, the Har-
ris’ corner detector is sometimes unstable for objects
moving towards the camera or away from it.
In the paper (Conte et al., 2010), the authors pro-
pose a method that provides a more accurate estima-
tion of the people number by considering also the is-
sues related to perspective effects and occlusions. In
particular, the authors propose to carry out the esti-
mation of the count through a trainable regressor (us-
ing the ε-SVR algorithm) suitably trained on the used
scene. Tests performed on very crowded scenes char-
acterized by a large field depth demonstrated high per-
formance improvements with respect to the method
by Albiol et al. However, this is obtained at the cost
of complex set up procedures for training the ε-SVR
regressor.
In this paper we describe a method that is able to
obtain performance comparable to those obtained by
the method of Conte et al., but at the same time retains
the overall simplicity of Albiol’s approach.
2 SYSTEM ARCHITECTURE
The approach we propose in this paper is conceptu-
ally similar to the one in (Albiol et al., 2009), but
introduces several changes to overcome some limita-
tions of that method and draws some ideas from the
approach in (Conte et al., 2010).
The first problem addressed is the stability of the
detected corner points. The latter are strongly depen-
dent on the perceived scale of the considered object:
the same object, even in the same pose, will have dif-
ferent detected corners if its image is acquired from
different distances. This can cause problems in at
least two different conditions. Firstly, the observed
scene contains groups of people whose distance from
the camera is very different: in this case it is not effec-
tive to use a simple proportionality law to estimate the
number of people, since the average number of cor-
ner points per person is different passing from close
people to far ones. Secondarily, the observed scene
contains people walking on a direction that has a sig-
nificant component orthogonal to the image plane, i.e.
they are coming closer to the camera or getting far-
ther from it: in this case the number of corner points
for these people is changing even if the number of
people remains constant. To mitigate this problem, as
in (Conte et al., 2010) we adopt the SURF algorithm
proposed in (Bay et al., 2008). SURF is inspired by
the SIFT scale-invariant descriptor (Lowe, 2004), but
replaces the Gaussian-based filters of SIFT with fil-
ters that use the Haar wavelets, which are significantly
faster to compute. The interest points found by SURF
are much more independent of scale (and hence of
distance from camera) than the ones provided by Har-
ris detector. They are also rotation invariant, which
is an important issue for the stability of the points lo-
cated on the arms and on the legs of the people in
the scene. The interest points associated to people
are obtained in two steps. First, we determine all the
SURF points within the frame under analysis. Then,
we prune the points not associated to persons by tak-
ing into account their motion information. In partic-
ular, for each detected point we estimate the motion
vector, with respect to the previous frame, by using a
block-matching technique and pruning those one with
a null motion vector.
The second issue we address in this paper is the
perspective effect, which causes that the farther the
person is from the camera, the fewer are the detected
interest points. As a consequence, a simple propor-
tionality relation between the number of detected in-
terest points and the number of persons in the scene
provides acceptable results only when the average dis-
tance of the persons is close to a reference distance
used to determine the proportionality factor, other-
wise this approach tends to overestimate the number
of people that are close to the camera and to underes-
timate it when people are far from the camera.
The authors in (Conte et al., 2010) propose to seg-
ment each single person or small group of persons at
similar distances from the camera by clustering the
detected interest points. The distance of each cluster
from the camera is derived from the position of the
bottom points of the cluster applying an Inverse Per-
spective Mapping (IPM), assuming that the bottom
points of the cluster lie on the ground plane. Then,
the number of persons in each cluster is determined
using an ε-Support Vector Regressor that receives the
number of points of a cluster, the distance and the
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
68
point density. However, the main limitation of this
approach is the costly and annoying procedure for
training the regressor, which requires that the training
samples are manually and carefully selected, so as to
guarantee an adequate coverage of the possible situ-
ations in terms of the number and density of persons
in the group and distance from the camera. Further-
more, this procedure has to be repeated for each cam-
era and requires also that the calibration parameters
of the camera are available.
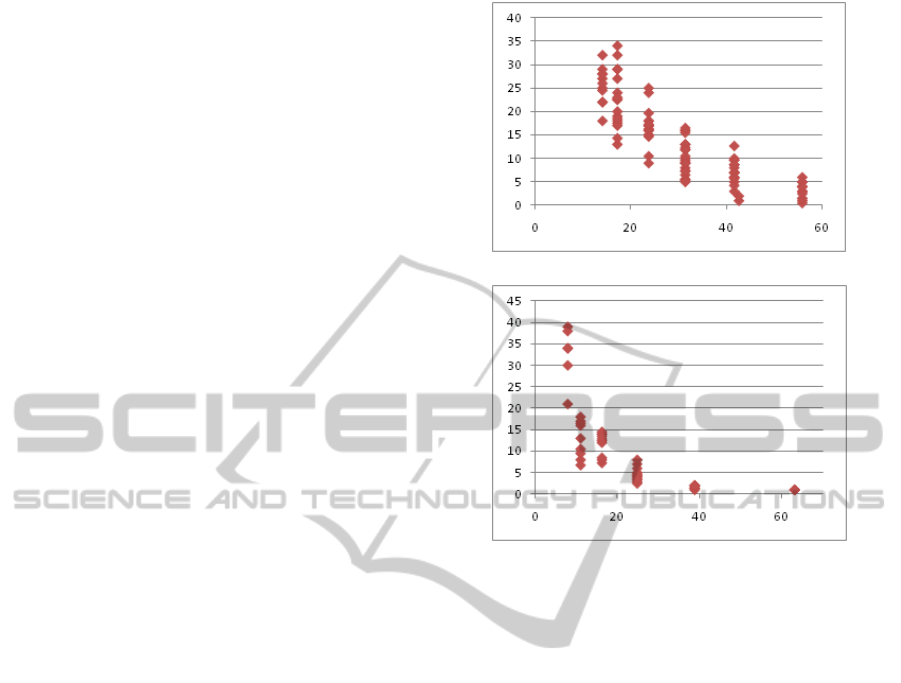
Our proposal stems from the idea that the number
of interest points per person only depends on the dis-
tance of the person from the camera. This assumption
is supported by experimental observations as it can be
verified by considering the plots in Figure 1, which
report the number of points per person versus the dis-
tance of the person from the camera. The plots were
obtained using some sample frames from the video
sequences of Table 1. The points are calculated by
considering several persons at fixed distances from
the camera and by counting the number of moving
SURF points associated to each of them. From the
figures, it is evident that the number of points per per-
son strongly depends on the distance from the cam-
era. This is more evident from the plot of Figure 1.b,
obtained using a camera with a wide field depth that
magnifies this dependence.
The total number of persons P into the scene can
be estimated as:
P =
N
∑
i=1
ω(d (p
i
)) (1)
where N is the number of detected moving SURF
points and ω(d (p
i
)) is the weigth attributed to the i-
th point p
i
. The weight depends on the distance d(p
i
)
from the camera. The above formula requires that the
distance d(p
i
) is calculated in the 3D-scene, but we
do not have information about the 3D coordinates of
the points. The authors in (Conte et al., 2010) implic-
itily solve this problem by attributing each detected
point to a person, but, as observed by themselves, this
operation can be easily performed only when persons
are well isolated in the scene; so in cases of crowded
scenes with persons at different distances from the
camera, this procedure is tipically complex and the
results unreliable.
In order to solve the problem of perspective nor-
malization, we partition the generic frame in several
longitudinal non overlapping bands, as proposed in
(Chan et al., 2009). The height of each band is fixed
equal to the height in pixels of an average person
whose feet are on the base of the band. So, the bands
represent classes of equivalence with respect to the
value of the weight attributed to a detected point, thus
(a)
(b)
Figure 1: Plots of the number of points per person (y-axis)
versus the distance of the person from the camera in me-
ters (x-axis). The points in the plots were obtained using
some sample frames from view 1 (a) and view 2 (b) of the
PETS2009 dataset.
attributing the same weight to all the points falling in
the same band. According to this assumption, Equa-
tion 1 can be modified as:
P =
N
∑
i=1
ω(B
p
i
) (2)
where B
p
i
is the band the point p
i
belongs to.
The partition of the scene in bands reconduces the
counting problem in presence of perspective effects to
n simpler counting problems, each for any band; in a
band the perspective is not considered. Consequently,
we have to set only the values of the weight for each
band. For the generic i-th band, this is done by se-
lecting some sample frames with persons that are all
perfectly contained. Then, the weight for the band
is obtained as the ratio between the total number of
points in the band over the selected frames and the
number of persons in the band. Once the set of the
weigths (Ω = {ω(B
k
)}), for all the bands, has been
determined, it is possible to calculate the total num-
ber of persons in the scene by adopting Equation 2.
Finally, the output count is passed through a low-
pass filter to smooth out oscillations due to image
AN EFFECTIVE METHOD FOR COUNTING PEOPLE IN VIDEO-SURVEILLANCE APPLICATIONS
69

noise.
The set up procedure of the method primarily re-
quires the determination of the height of the bands;
these are depending on the geometrical parameters of
the systems, as the focal lenght and the relative po-
sition of the camera in the environment. Once these
ones have been properly evaluated, it is necessary to
complete the procedure by estimating, for each band,
the corresponding counting coefficient ω(B
k
). It is
worth noting that the knowledge of the perspective
function f, giving the height in pixel of a person (hav-
ing an average height) as a function of its position in
the image, is sufficient to obtain the bands as a result
of an iterative process. The perspective function f is
linear and can be approximated by an automatic pro-
cedure, applied to a video of a few seconds: a person
is required to cross the scene, moving in different di-
rections, so as to obtain a good coverage of the visual
area. In each frame, we can automatically determine
its position p
i
and the corresponding height h
i
; once a
sufficient number of these couples (p
i
, h
i
) have been
extracted, it is possible to obtain, by an approximation
method, the analytical expression of f. An example
of the obtained results on PETS database is shown in
the Figure 2.
3 EXPERIMENTAL RESULTS
The performance of the proposed method has been
assessed using the PETS2009 dataset (PETS, 2009).
The latter is organized in four sections, but we fo-
cused our attention primarily on the section S1 used
to benchmark algorithms for the ”Person Count and
Density Estimation” PETS2009 and 2010 contests.
The main characteristics of the used video sequences
are summarized in Table 1.
The videos refer to two different views obtained
by using two cameras that contemporaneously ac-
quired the same scene from different points (see Fig-
ure 3 for an example frame of each view). For our ex-
perimentations, we used four videos of view 1, which
are also the same videos that were used in the people
counting contest held in PETS2009. The videos in the
second set refer to view 2 which is characterized by
a wide field depth that makes the counting problem
more difficult to solve. An example frame for each
view of the test videos is shown in Figure 3.
Tests of the proposed method have been carried
out by partitioning the frames of the video sequences
in bands as shown in the Figure 2. The training of
the system, aimed at determining the set Ω, was per-
formed by using about 10 sample frames for each
band. The frames were selected from other sequences
available in the PETS2009 dataset that where not used
for the tests. Testing has been carried out by com-
paring the actual number of people in the video se-
quences and the number of people calculated by the
algorithm. The indices used to report the performance
are the Mean Absolute Error (MAE) and the Mean
Relative Error (MRE) defined as:
MAE =
1
N
·
N
∑
i=1
|G(i)− T(i)| (3)
MRE =
1
N
·
N
∑
i=1
|G(i)− T(i)|
T(i)
(4)
where N is the number of frames of the test sequence
and G(i) and T(i) are the guessed and the true number
of persons in the i-th frame, respectively.
The MAE index is the same performance index
used to compare the performance of the algorithms
that participated to the PETS2009 contest. This in-
dex is very useful to exactly quantify the error in the
estimation of the number of person which are in the
focus of the camera, but it does not relate this error to
the number of people; in fact, the same absolute error
can be considered negligible if the number of persons
in the scene is high while it becomes significant if the
number of person is of the same order of magnitude.
For this reason, we introduced also the MRE index
which takes into account the estimation error related
to the true people number.
The performance of the proposed method on the
adopted dataset is reported together with that of Al-
biol’s and Conte’s methods, using the results reported
in (Conte et al., 2010). The motivation behind the
choice of comparing our technique with respect to
these two methods is twofold. First, both methods be-
long to the category of the indirect approaches. Sec-
ondly, both methods have already been compared to
other algorithms based either on the direct or the in-
direct approach, in the PETS 2009 and 2010 contests
on people counting, consistently outperforming them
(Ellis and Ferryman, 2010). Since our test dataset
contains also the video sequences used for the PETS
2009 contest on people counting, we can reasonably
expect that, at least on that kind of scene, also our
method performs well with respect to those other al-
gorithms. From the results reported in Table 2, it is
evident that the proposed method in almost all cases
outperforms Albiol’s technique with respect to both
MAE and MRE performance indices, while its perfor-
mance is always very close to that obtainedby Conte’s
method. This aspect is more evident if we refer to the
results obtained on view 2.
In order to have a deeper insight into the behavior
of the considered algorithms, Figure 4 shows the es-
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
70
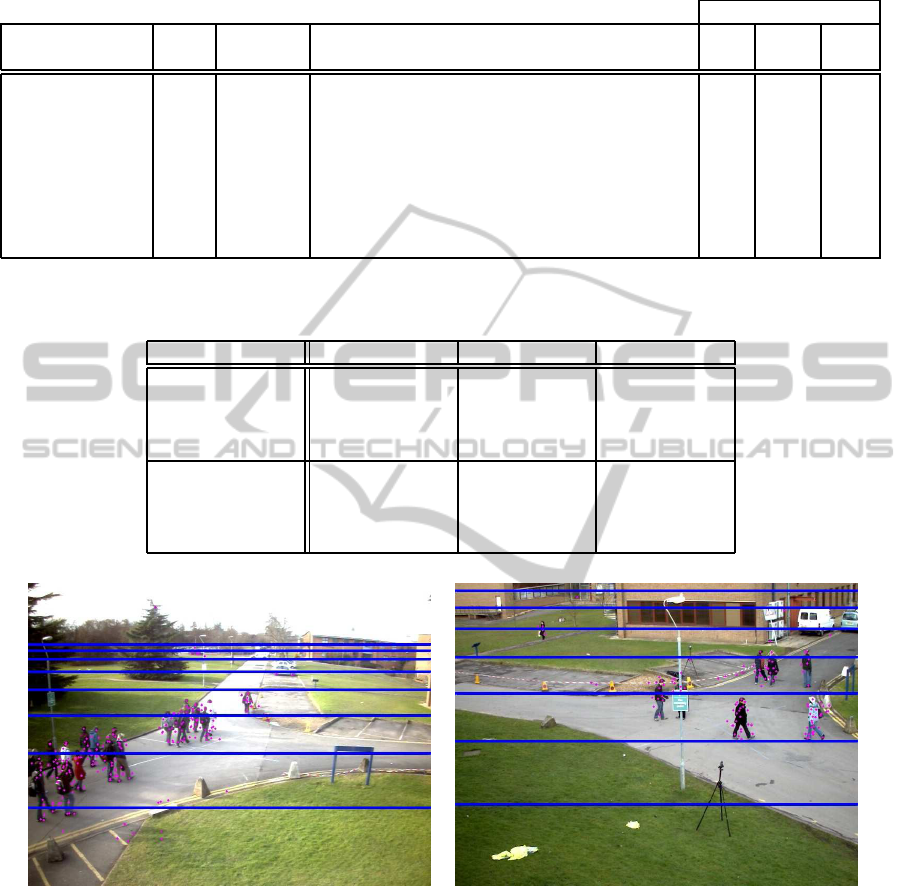
Table 1: Relevant characteristics of the four sequences of the PETS 2009 datasets used for assessing the performance of the
proposed method.
Number of people
Video sequence View Length
(frames)
Conditions Min AVG Max
S1.L1.13-57 1 221 medium density crowd, overcast 5 22.61 34
S1.L1.13-59 1 241 medium density crowd, overcast 3 15.81 26
S1.L2.14-06 1 201 high density crowd, overcast 0 26.28 43
S1.L3.14-17 1 91 medium density crowd, sunshine and shadows 6 24.34 41
S1.L1.13-57 2 221 medium density crowd, overcast 8 34.19 46
S1.L2.14-06 2 201 high density crowd, overcast 3 37.10 46
S1.L2.14-31 2 131 high density crowd, overcast 10 35.19 43
S3.MF.12-43 2 108 very low density crowd, overcast 1 4.99 7
Table 2: Performance of the Albiol’s algorithm, of the Conte’s and of the proposed ones. In each cell there are reported the
values of the MAE and of the MRE (in parenthesis) performance indices.
Video (view) Albiol Conte Our
S1.L1.13-57 (1) 2.80 (12.6%) 1.92 (8.7%) 1.37 (6.9%)
S1.L1.13-59 (1) 3.86 (24.9%) 2.24 (17.3%) 2.58 (15.6%)
S1.L2.14-06 (1) 5.14 (26.1%) 4.66 (20.5%) 5.44 (20.7%)
S1.L3.14-17 (1) 2.64 (14.0%) 1.75 (9.2%) 2.74 (15.1%)
S1.L1.13-57 (2) 29.45 (106.0%) 11.76 (30.0%) 9.13 (23.9%)
S1.L2.14-06 (2) 32.24 (122.5%) 18.03 (43.0%) 17.74 (43.6%)
S1.L2.14-31 (2) 34.09 (99.7%) 5.64 (18.8%) 6.61 (21.7%)
S3.MF.12-43 (2) 12.34 (311.9%) 0.63 (18.8%) 1.60 (34.6%)
(a) (b)
Figure 2: Subdivision of the frames of the video sequences for the test: a) S1.L1.13-57 (view 1), b) S1.L2.14-31 (view 2).
The height of each band approximatively corresponds to the height of a person in real world coordinates.
timated number of people as a function of time. The
behavior of the considered algorithms with respect to
the video sequences of Figure 4 can be explained by
recalling the main hypothesis at the basis of each of
them. Albiol’s method hypothesizes a linear relation
between the number of detected interest points and
the number of persons without taking into account the
perspective effects and the people density. As a re-
sult this method provides better results when tested in
working conditions that are similar to those present in
the training videos. Conversely, the method by Conte
et al. takes specifically into account both the perspec-
tive and the density issues, thus globally it provides
better results. The proposed method uses the same
hypothesis of Albiol, using a linear relation between
points and persons, but the adopted proportionality
AN EFFECTIVE METHOD FOR COUNTING PEOPLE IN VIDEO-SURVEILLANCE APPLICATIONS
71

(a) (b)
Figure 3: Examples of the frames of the video sequences used for the test: a) view 1, b) view 2.
factor depends also on the distance from the cam-
era in order to cope with perspective effects. Thus,
good performance have to be expected also in cases
where perspective is more evident, as in view 2. The
Figure 4.a refers to the view 1 of the video sequence
S1.L1.13-59. This video is characterized by isolated
persons or very small groups of persons that gradually
enters and crosses the scene with no or very small oc-
clusions. The Figure 4.b refers to the same camera
view sequence S1.L2.14-06, but in this case the per-
sons cross the scene in a large and compact group, re-
sulting in a high degree of occlusions among them. In
both sequences all the persons move in a direction that
is orthogonal to the optical axis of the camera, so that
their distance from the camera does not change signif-
icantly during their permanence in the scene. In this
regard, the perspective effect is not the main issue. If
we consider these sequences, it is possible to observe
that the proposed algorithm shows different behaviors
if compared to the remaining two techniques: in fact,
in one case it provides the lowest value of the abso-
lute estimation error, while in the other one performs
the worst. The presence of occlusions affect the per-
formance of the proposed method; the higher is the
degree of occlusion the higher is the estimation error.
This can be simply explained by taking into account
the fact that the proposed method has been trained
by considering more samples of isolated persons than
samples of groups of persons. However, it should also
be noted that if we consider the relative estimation er-
ror the abovedescribed behavior changes quite signif-
icantly as the performanceof the proposed method are
much better. This fact is very interesting: this means
that even when the absolute estimation error is higher
in the average, this error is better distributed with re-
spect to Albiol’s approach and comparably with re-
spect to Conte’s one.
Figures 4.c and 4.d are related to view 2. In this
case the correction of the perspective effects plays a
fundamental role in the performance improvements
obtained by the proposed method. In fact, in this case
the method of Albiol et al. tends to overestimate or
underestimate the number of persons when they are
close to or far from the camera, while it provides a
good estimate only when the persons are at an aver-
age distance from the camera (this is evident by con-
sidering the Albiol and the ground truth curves in the
figure). On the contrary, the proposed method and
Conte’s one are able to keep the estimation error low
along almost all the sequence. The exception is rep-
resented by the last part of the sequence S1.L1.13-57
where all approaches tend to underestimate the num-
ber of the persons: however, this can be explained by
considering that in this part of the video the persons
are very far from the camera and most of their interest
points are considered static. The sequence S1.L1.13-
57 is characterized by a quite large and dense crowd
that crosses the scene in a direction that is almost par-
allel to the optical axis of the camera. Interestingly, in
spite of the high degree of occlusions that character-
izes the sequence, the proposed method performs bet-
ter than Conte’s method (Figure 4.c). This can be ex-
plained by considering the fact that the latter method
infers the number of persons for each group obtained
after the clustering procedure assuming that the bot-
tom points of the cluster lie on the ground plane. This
is a valid assumption when the clustering algorithm
provides groups constituted by single persons or by
persons close to each other and at the same distance
from the camera: in these cases, the error in the es-
timation of the distance of the people from the cam-
era is negligible. As highlighted by the same authors,
when several persons at different distances from the
camera are aggregated in a single cluster, the dis-
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
72
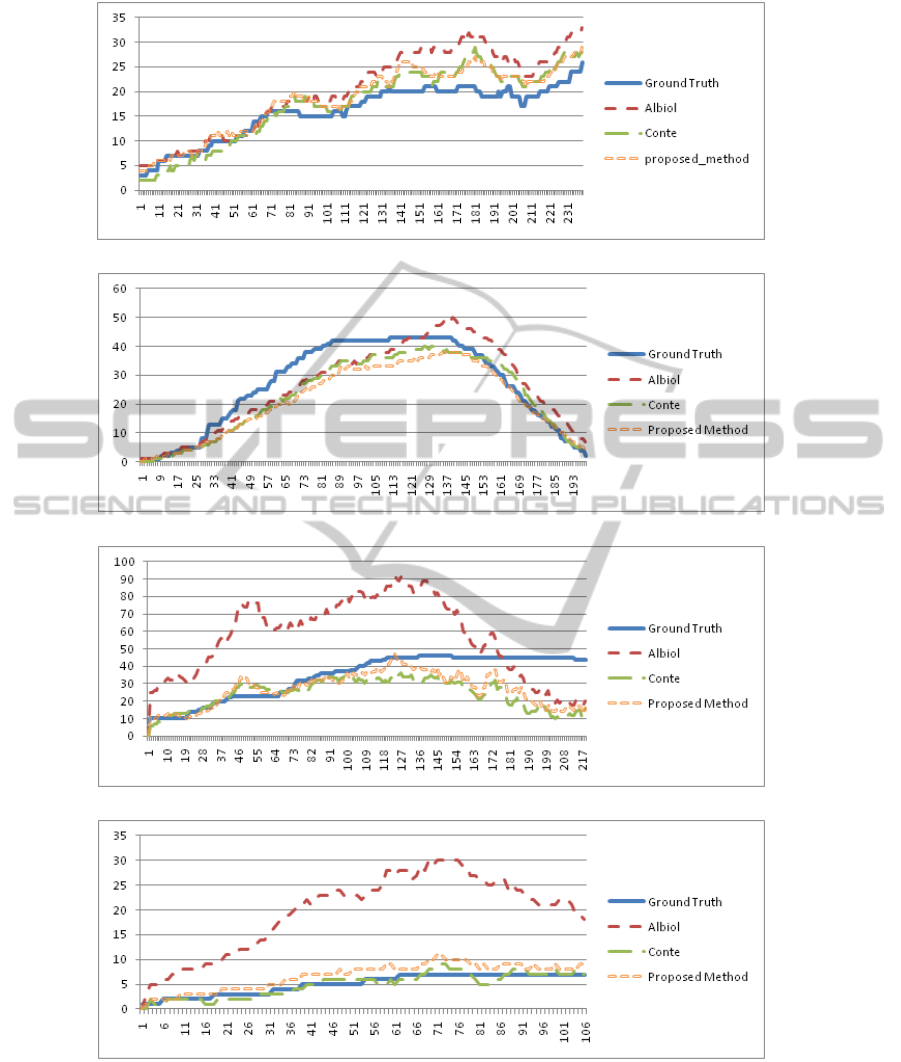
a)
b)
c)
d)
Figure 4: Curves of the number of people in each frame estimated by the Albiol’s algorithm, Conte’s and the proposed ones
together with the ground truth on the video sequence S1.L1.13-59 view 1 (a), S1.L2.14-06 view 1 (b), S1.L1.13-57 view 2 (c)
and S3.MF.12-43 view 2 (d). On the x-axis it is reported the frame number.
tance estimation error can be significant. On the con-
trary, the proposed method is able to better cope with
this situation due to the fact that the contribution of
each interest point to the final estimation of the peo-
AN EFFECTIVE METHOD FOR COUNTING PEOPLE IN VIDEO-SURVEILLANCE APPLICATIONS
73

ple number depends on the band which it belongs to.
The curve reported in Figure 4.d, related to view 2 of
the sequence S3.MF.12-43, shows that when there are
few isolated persons in the scene Conte’s method can
provide more accurated results.
4 CONCLUSIONS
In this paper we have presented a method for count-
ing people in video surveillance applications. The
method has been experimentally compared with the
algorithm by Albiol et al. and by Conte et al. that
were among the best approaches of the PETS 2009
and 2010 contests on people counting. These meth-
ods are also the base from which we started to define
our proposal. The experimentation on the PETS 2009
database has confirmed that the proposed method is in
several cases more accurate than Albiol’s one while
retaining robustness and computational requirements
that are considered the greatest strengths of the latter.
On the other side our method obtains results compa-
rable to those yielded by the more sophisticated ap-
proach by Conte et al. also on very complex scenar-
ios as that proposed by the view 2 of the PETS2009
dataset, but differently from the latter it it does not re-
quire a complex set up procedure. As a future work,
a more extensive experimentation will be performed,
adding other algorithmsto the comparisonand enlarg-
ing the video database to provide a better characteri-
zation of the advantages of the new algorithm.
REFERENCES
Albiol, A., Silla, M. J., Albiol, A., and Mossi, J. M. (2009).
Video analysis using corner motion statistics. In IEEE
International Workshop on Performance Evaluation
of Tracking and Surveillance, pages 31–38.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008).
Surf: Speeded up robust features. Computer Vision
and Image Understanding, 110(3):346–359.
Brostow, G. J. and Cipolla, R. (2006). Unsupervised
bayesian detection of independent motion in crowds.
In IEEE Conf. on Computer Vision and Pattern Recog-
nition, pages 594–601.
Chan, A. B., Liang, Z. S. J., and Vasconcelos, N. (2008).
Privacy preserving crowd monitoring: Counting peo-
ple without people models or tracking. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1–7.
Chan, A. B., Morrow, M., and Vasconcelos, N. (2009).
Analysis of crowded scenes using holistic proper-
ties. In IEEE International Workshop on Performance
Evaluation of Tracking and Surveillance, pages 101–
108.
Cho, S.-Y., Chow, T. W. S., and Leung, C.-T. (1999). A
neural-based crowd estimation by hybrid global learn-
ing algorithm. IEEE Transactions on Systems, Man,
and Cybernetics, Part B, 29(4):535–541.
Conte, D., Foggia, P., Percannella, G., Tufano, F., and
Vento, M. (2010). A method for counting people
in crowded scenes. In Advanced Video and Signal
Based Surveillance (AVSS), 2010 Seventh IEEE Inter-
national Conference on.
Ellis, A. and Ferryman, J. (2010). Pets2010 and pets2009
evaluation of results using individual ground truthed
single views. In Advanced Video and Signal Based
Surveillance (AVSS), 2010 Seventh IEEE Interna-
tional Conference on.
Harris, C. and Stephens, M. (1988). A combined corner and
edge detector. In Proceedings of the 4th Alvey Vision
Conference, pages 147–151.
Kong, D., Gray, D., and Tao, H. (2006). A viewpoint
invariant approach for crowd counting. In Inter-
national Conference on Pattern Recognition, pages
1187–1190.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Marana, A. N., da F. Costa, L., Lotufo, R. A., and Velastin,
S. A. (1999). Estimating crowd density with mikowski
fractal dimension. In Int. Conf. on Acoustics, Speech
and Signal Processing.
PETS (2009). http://www.cvg.rdg.ac.uk/PETS2009/.
Rahmalan, H., Nixon, M. S., and Carter, J. N. (2006). On
crowd density estimation for surveillance. In The In-
stitution of Engineering and Technology Conference
on Crime and Security.
Rittscher, J., Tu, P., and Krahnstoever, N. (2005). Simulta-
neous estimation of segmentation and shape. In IEEE
Conf. on Computer Vision and Pattern Recognition,
pages 486–493.
Zhao, T., Nevatia, R., and Wu, B. (2008). Segmentation
and tracking of multiple humans in crowded envi-
ronments. IEEE Trans. Pattern Anal. Mach. Intell.,
30(7):1198–1211.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
74
