
AN INTEGRATED SYSTEM FOR SCHOOL TIMETABLING
∗
Luisa Carpente
D
epartment of Mathematics, University of A Coru˜na, A Coru˜na, Spain
Ana Cerdeira-Pena, Guillermo de Bernardo, Diego Seco
Database Laboratory, University of A Coru˜na, A Coru˜na, Spain
Keywords:
Timetable generation, Planning and scheduling.
Abstract:
In this paper, we present an application that covers the whole complex school timetabling process, from
the data introduction to the final adjustment of the automatically generated solution. On the one hand, our
application interacts with the Academic Administration Official Systems (AAOS) and simplifies the hard phase
of introducing the data. On the other hand, complete solutions areefficiently provided by an algorithmic engine
based on different heuristic techniques, and easily updated by means of a thoroughly designed user interface.
1 INTRODUCTION
Several years ago, timetables were manually created
by the educational center staff. Nowadays, this pro-
cess has been simplified by semi-automatic solutions
based on timetable generation applications (e.g. Kro-
nowin). These programs build a set of timetables,
but still do not solve the whole problem. The tedious
tasks of data introduction and revision of usually in-
complete solutions are the bottleneck in these cases.
Furthermore, these applications lack complete inte-
gration capabilities that would allow the users of the
system to import/export the data from/to the AAOS.
The first contribution of this paper lies in an em-
pirical comparison of a group of algorithms, based
on different heuristic techniques, that solve the op-
timization problem in a complete and efficient way.
However, educational centers need easy-to-use sys-
tems that make lighter their work. Thus, the second
contribution of this paper is a complete architecture
and a fully functional application based on it that can
be used to generate timetables in real scenarios (ed-
ucational centers). We mainly focus on integration
aspects of the system and its usability.
∗
Funded in part by MICINN grant TIN2009-14560-
C03-02; by MICINN ref. AP2007-02484 (FPU Program),
for the second author; and by MICINN ref. BES-2010-
033262 (FPI program) for the third author.
2 APPLICATION DESIGN
The complete process of timetable construction is di-
vided in several steps: i) Data input: data about teach-
ers, groups and subjects, as well as teachers’ prefer-
ences and other constraints are introduced in the sys-
tem. Most of this information is automatically re-
trieved. ii) Automatic timetable generation: the in-
formation is processed to obtain a set of constraints
and to generate the required set of timetables. iii)
Timetable refinement: the generated solution is shown
to the user. Although generated solutions are always
complete and havegood quality, they can be improved
by hand. Finally, the application exports automati-
cally the generated timetables to the AAOS.
Figure 1: Application architecture.
Figure 1 shows our modular architecture designed
to manage the whole process. Although a common
data model is used, the import and export tasks need
to interact with external systems. The generation en-
gine has been designed to be independent of the main
599
Carpente L., Cerdeira-Pena A., de Bernardo G. and Seco D..
AN INTEGRATED SYSTEM FOR SCHOOL TIMETABLING.
DOI: 10.5220/0003181805990603
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 599-603
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

application to allow the evolution of the generation
system. Therefore, the application is built over two
modules that hold the “external” information manage-
ment, and that are integrated by the transformation of
the information to the common data model. The inte-
gration module or data exchange module deals with
the data exchange between the application and the
AAOS. The Timetable generation module is in charge
of the generation of a complete solution, according to
the user-defined constraints. This generation engine
can also work as a standalone system.
Constraints, preferences and other timetable el-
ements were taken into account in the modeling of
the timetable-specific domain. Most of the common
timetable constraints are integrated in the generation
engine used. However, the common model does not
only use these restrictions, but it also manages many
combinations of them. The interaction with the sys-
tem is done by means of an abstraction layer that
makes the structure of the model completely trans-
parent to the user. For instance, some constraints are
internally modeled as multiple simple constraints, as
most of the generation tools do. Nevertheless, the user
interface is based on user-defined constraints, that are
easier to understand for the user. This implies that
user interaction will be exhaustively checked for data
integrity, given that the user actions should be limited
as less as possible.
3 INTEGRATION MODULE
This module allows the application to exchange in-
formation with the AAOS that store information of
all the educational centers in a region. Although at
the moment just the AAOS of the Galician govern-
ment (Xade) is supported, this module can be easily
extended. An AAOS usually stores all the informa-
tion about the centers and provides a web interface to
introduce the final timetables. Note that, for example,
Xade does not provide a web service to retrieve/store
data, so this task must be performed by hand. More-
over, many times generated timetables contain ele-
ments that are not accepted by the official data model
and the timetables haveto be adapted. The goal of this
module is to improve the dealing with these AAOS.
In order to support those AAOS that do not pro-
vide a web service to access the stored information,
we use a web automation engine to import/export data
from/to the AAOS. This engine uses a data scraper
based on HTML parsing. The engine contains mul-
tiple importers/exporters that deal with the different
entities in the domain model. The integrity of the in-
dividual entities is controlled by the importers. More-
over, the importers can communicate with each other
to infer the relationships between the external entities,
and map them to our common model.
To export data to the AAOS a more complicated
process is performed because the generated timeta-
bles can contain elements that are not allowed in the
AAOS. Most of the elements that can not be created in
the AAOS are recognized and transformed automati-
cally by the integration module (in fact, many “ille-
gal” elements are internally represented as legal ele-
ments with one or more constraints). In case some of
the information has changed the module uses heuris-
tics to match the generated model with the informa-
tion found at the moment in the external applica-
tion, using statistics obtained from previous mappings
and some domain-specific information (e.g. official
acronym tables). In most of cases, the inferencesdone
by the application do not need further adjustment by
the user. Anyway, the user is allowed to manually
make any changes before the export is performed.
4 TIMETABLE GENERATION
MODULE
The school timetabling problem consists of finding
in which period of time a given teacher has to teach
a certain subject to a specified group. Additionally,
two different types of constraints have to be consid-
ered during this process: hard and soft constraints.
The hard constraints must be satisfied to obtain a
feasible solution. We consider the following types:
overlaps (a class can not be taught by more than one
teacher in the same period, and classes sharing re-
sources can not be assigned to the same period), si-
multaneity (two classes are taught by different teach-
ers at the same time, becauseof the division of a group
into subgroups, for example), unavailability (periods
when a class can not be given or when a teacher can
not teach), consecutiveness (some lessons should be
taught in two or more consecutive time periods). The
soft constraints measure the goodness of a solution.
We consider: overuse (the number of periods per day
in which a teacher gives his/her lessons, over a max-
imum), underuse (the opposite of the previous one),
holes (the number of empty periods between two con-
secutive ones where a teacher is assigned a class),
splits (the number of periods between two non con-
secutive assignments to a same class in the same day),
groups (assuming a specified maximum of periods per
day for a teacher-class association, it considers the
number of exceeding periods in such day), undesired
(number of periods in which a teacher would prefer
not to teach, but is assigned a class).
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
600

4.1 Algorithms Description
The school timetabling problem can be defined by a
mathematical formulation (Schaerf, 1999), which de-
scribes the feasible regions through a solution space;
and an objective function, which allows to lead the
search process towards an optimal solution. The
constraints that define such space are the hard con-
straints. On the other hand, each soft constraint
has usually an assigned weight and contributes to the
value of the objective function. However, in practice,
we are interested in managing both kind of constraints
with a function called cost function that assigns a cost
to each solution depending on the number of failed
constraints. Each constraint has associated a weight
(higher in hard constraints to lead the search process
towards feasible regions). Then, the objective of the
school timetabling generation problem is to find the
solution that minimizes such function.
As we noted before, the timetabling problem we
consider admits a mathematical programming repre-
sentation, so an exact solution could be obtained by
applying well-known techniques in this field. Never-
theless, it has been shown that this is a NP-complete
problem (de Werra, 1985; Even et al., 1976). In prac-
tice, the high dimensionality of the problem makes
it impossible to find an exact solution, and approxi-
mated methods are needed to tackle it (de Haan et al.,
2006; Schaerf, 1999; Keppler and Erben, 1996). We
propose and study the performance of three different
algorithms based on heuristic search techniques.
We use a teacher-oriented representation of the
problem, and therefore a timetable is represented as
a two-dimensional matrix where each cell (i, j) con-
tains the class given by the i
th
teacher at the j
th
pe-
riod. This representation avoids implicitly the case of
a teacher giving more than one class at a same time.
We also define two kind of moves: i) simple-moves,
that are obtained by swapping two distinct values in a
given row of the timetable; and ii) double-moves that
are the combination of two simple-moves when the
first move leads to an unfeasible scenario.
RNA Search. Following the RNA local search tech-
nique, we have developed an algorithm which, start-
ing from an initial solution, iteratively moves from
a solution to another doing double-moves. It keeps
track of the current best solution at each stage. The
process is repeated until there are no improvements
during a given number of iterations.
Genetic Algorithms. Genetic algorithms base their
operation on the evolution mechanism. Starting with
a population, a set of individuals or potential solutions
(timetables, in our case), best candidates are selected
based on their fitness value (given by the cost func-
tion). These will be the parents of a new group of
individuals obtained by modifying the previous ones
by using crossovers and mutations, which allow ex-
ploring the search space and guaranteeing the genetic
diversity, respectively. The new population will be
processed in the same way in the next iteration.
In our case, a crossover consists of selecting a
certain number of rows from each of the parents,
given by a randomly chosen crossover point in the
timetable. A mutation is done by means of a simple
move. We have developed two different approaches:
i) Tournament (GT): starting with a population ran-
domly generated, two pairs of individuals are selected
and then the best candidate of each pair is chosen.
The parents of the next generation are obtained in this
way; ii) Four Children Tournament (GT4C): once two
individuals are chosen to form a pair they are dis-
carded, so they will never be chosen again.
Furthermore, we have combined the previous al-
gorithms obtaining two hybrid ones, Tournament &
RNA (GT & RNA) and Four Children Tournament
& RNA (GT4C & RNA). Moreover, we have created
some variants of our genetic-based algorithms follow-
ing the strategies: v1) To increase dynamically the
number of mutations after a given number of itera-
tions without improvements; v2) To apply a more eli-
tist selection technique of the best candidates, so re-
ducing its proportion to a given percentage, and v3)
Not to eliminate the loser candidates when we work
with a GT4C phase, in such a way, all the individuals
could be parents at least once.
4.2 Algorithms Evaluation
To properly evaluate the algorithms performance, dif-
ferent experiments were run over two sets of synthetic
test cases with different size and configurations. Data
set A is composed of 10 files of 6 groups, 70 classes
and 15 teachers. Table 1 shows the average value of
unsatisfied constraints and the standard deviation for
10 runs, limited in time to 30 minutes. Results show
that most algorithms obtain good results and perform
quite similarly, with the exception of a small group
that perform very badly: variants v1 and v1+v2 of the
genetic algorithms and variant v3. The best choices
seem to be RNA and GT4C.
After discarding the algorithms that behaved badly
in the previous case, we studied the performance of
the remaining over a bigger scenario (B) involving 27
groups, 333 classes and 71 teachers. The different al-
gorithms were run 4 times, limiting the time to 5 hours
each. Table 2 shows that variant v2 obtains very good
results, especially version GT & RNA, that reduces
the variability. RNA and variant v1+v2+v3 behave
AN INTEGRATED SYSTEM FOR SCHOOL TIMETABLING
601
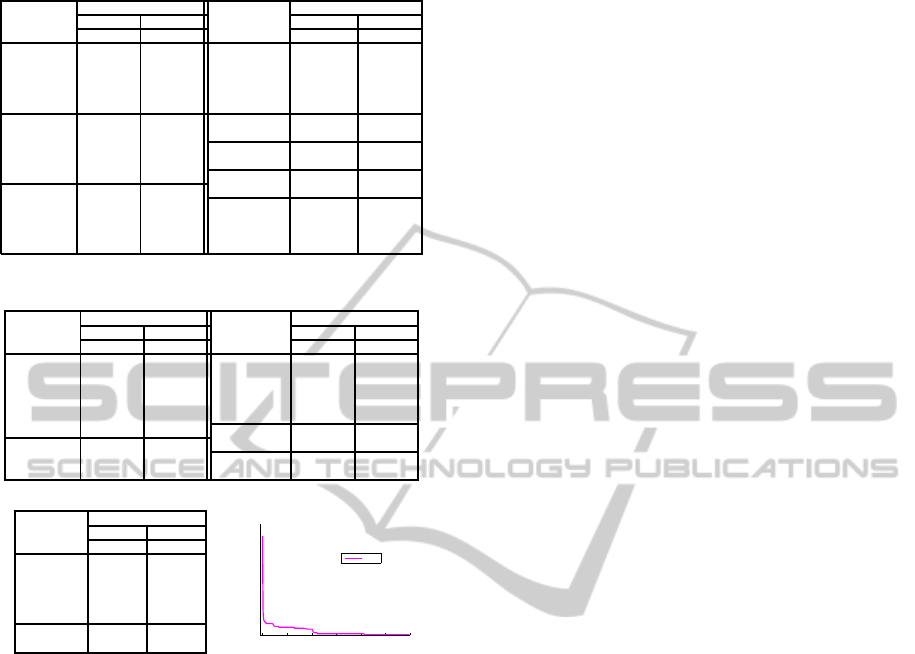
Table 1: Results for the collection A.
Algorithm Constraints Algorithm Constraints
Avg Std Avg Std
hard soft hard soft hard soft hard soft
RNA 0.16 0.60 0.09 0.39 Var: v2
GT 0.22 1.45 0.22 0.32 GT 0.26 0.74 0.14 0.45
GT4C 0.31 2.05 0.29 0.68 GT4C 0.23 0.74 0.16 0.44
GT & RNA 0.44 2.30 0.50 1.35 GT & RNA 0.44 1.74 0.46 0.92
GT4C & RNA 0.38 2.46 0.33 0.93 GT4C & RNA 0.33 1.41 0.34 0.84
Var: v1 Var: v1+v2+v3
GT 6.94 23.57 3.81 3.88 GT4C & RNA 0.49 2.06 0.42 0.70
GT4C 7.07 23.32 3.99 3.84 Var: v1+v3
GT & RNA 0.34 2.74 0.29 0.96 GT4C & RNA 0.43 4.33 0.42 1.55
GT4C & RNA 0.28 2.74 0.25 1.20 Var: v2+v3
Var: v1+v2 GT4C 0.28 0.75 0.22 0.43
GT 3.99 15.57 2.86 2.85 Var: v3
GT4C 5.53 18.90 3.50 2.23 GT4C 27.62 42.19 7.52 3.97
GT & RNA 0.47 1.90 0.48 0.96
GT4C & RNA 0.41 1.76 0.43 0.73
Table 2: Results for the scenario B.
Algorithm Constraints Algorithm Constraints
Avg Std Avg Std
hard soft hard soft hard soft hard soft
Original var: v2
RNA 0.88 63.58 0.82 3.77 GT 1.94 26.04 1.39 4.17
GT 2.88 67.21 2.11 8.42 GT4C 2.69 34.08 1.53 6.53
GT4C 3.88 71.04 2.26 5.85 GT & RNA 0.94 30.38 0.98 2.77
GT & RNA 1.50 62.54 1.54 6.50 GT4C & RNA 1.94 35.71 1.44 4.12
GT4C & RNA 1.75 70.33 1.35 3.95 var: v1+v2+v3
var: v1 GT4C & RNA 1.00 52.67 0.73 5.71
GT & RNA 1.75 63.75 1.19 4.71 var: v2+v3
GT4C & RNA 2.25 69.04 2.12 4.49 GT4C 2.75 49.88 1.71 4.64
Algorithm Constraints
Avg Std
hard soft hard soft
Original
RNA 0.88 5.95 0.74 1.72
GT 1.05 6.90 1.01 2.92
GT4C 0.55 6.37 0.72 1.83
GT & RNA 1.63 8.10 1.07 2.71
Var: v2
GT4C & RNA 2.20 8.42 1.95 3.69
0 10 20 30 40 50 60
0
2
4
6
8
10
12
x 10
4
Time (minutes)
Cost Function
GT4C
Figure 2: Results for real data.
also well, but they lead to a high number of unsatis-
fied soft constraints.
To complete the study, we checked the perfor-
mance of the best algorithms with real data obtained
from a Secondary school. Left part of Figure 2 shows
that all the chosen algorithms reach good results;
however, we can highlight those of RNA and GT4C.
Notice that the impossibility of satisfying 100% of the
hard constraints is usually caused by the incompati-
bility of the constraints imposed by educational cen-
ters. In these cases, we are interested in reaching the
least penalized solution. The right plot of the same
figure shows the evolution of the cost function of the
best solution over time.
5 USER INTERACTION
As we explained before, our application manages the
complete process of school timetable construction.
Most of the traditionally time-consuming tasks are
performed automatically. The phases in which the
process can not be automated are the data introduction
and the solution refinement. To simplify these steps,
we worked in collaboration with domain experts to
extract the real needs of the users and the functionali-
ties that could enhance these tasks.
Typing the data set for the timetable generation is
probably the most tedious task in the existing tools. In
our application, the user interface has been designed
to make easier this step. It allows the user to cre-
ate some arbitrary elements that do not correspond to
usual situations. For instance, a teacher giving lessons
of different subjects at the same time is usually a non-
consistent situation, but in many centers this situation
is a real problem to be solved. These actions are man-
aged by the application by building a consistent so-
lution based on fictitious elements. Additionally, the
data input interface helps the user to debug the infor-
mation introduced. Whenever a potential problem is
detected the user is notified, and guided over the rea-
sons that could have caused it. The model transfor-
mation that is applied to the user constraints keeps
traceability between the underlying constraints and
the original user domain objects. Only actions that
cause a non-consistent state of the timetable set are
blocked, while potentially malformed constraint sets
are admitted. By limiting as little as possible the user
capabilities in the data introduction stage, the appli-
cation provides maximum flexibility to the users.
When a solution is finally generated, the final re-
sult has to be verified and validated by the user be-
fore being exported. Most of the existing tools have
a basic interface for this, in some cases including an
“advisor” that suggests changes. However, in most of
cases any change in an existing solution usually re-
quires many changes in several timetables to adjust a
single lesson. Thus, our application proposes a dif-
ferent perspective of the timetable refinement: it re-
lies on the user to make the decisions and provides an
user interface that gives a global vision of the solu-
tion set. The screen is split to show at the same time
groups and teachers timetables. It can display at all
times a subset of relevant timetables, that is updated
according to the user actions. For instance, when the
user changes the timetable for a teacher, the applica-
tion will automatically update the relevant subset of
timetables to focus also on the group or groups that
contain the conflicting time period (or those in which
new conflicting periods appear). The conflicts that in-
volve each timetable are shown using a visual code to
immediately identify the problems.
User actions during the solution refinement are not
limited at all. Thus the user can create non-feasible
solutions. The system checks in each step the in-
tegrity of the resulting solution.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
602

REFERENCES
de Haan, P., Landman, R., Post, G., and Ruizenaar, H.
(2006). A four-phase approach to a timetabling prob-
lem in secondary schools. PATAT’06, pp. 423–425.
de Werra, D. (1985). An introduction to timetabling. Eur.
Journal of Operational Research, 19(2):151–162.
Even, S., Itai, A., and Shamir, A. (1976). On the complex-
ity of timetable and multicommodity flow problems.
SIAM Journal on Computing, 5:691–703.
Keppler, J. and Erben, W. (1996). A genetic algorithm solv-
ing a weekly course-timetabling problem. PATAT’96,
pp. 198–211.
Schaerf, A. (1999). Local search techniques for large high-
school timetabling problems. IEEE Transactions on
Systems, Man, and Cybernetics, 29:368–377.
AN INTEGRATED SYSTEM FOR SCHOOL TIMETABLING
603
