
USING META-AGENTS TO BUILD MAS MIDDLEWARE
S. C. Lynch
School of Computing, University of Teesside, Tees Valley, TS1 3BA, Middlesbrough, U.K.
Keywords: Meta-agents, Platforms, Middleware, Distributed systems.
Abstract: Various multiagent platforms exist, each providing a range of individual capabilities but typically their
implementations lack the flexibility to allow developers to adapt them to the differing needs of individual
applications. This paper investigates the design of a kernel for MAS middleware based on primitive meta-
agents. We specify these meta-agents and examine how they can be used to realise the capabilities required
by multiagent platforms. We examine how changes in the organisation of meta-agents produce MAS
platforms with differing behaviours. We evaluate the meta-agent approach by experimentation,
demonstrating how modifications in meta-agent behaviour can provide different strategies for agent
communication, scoping rules and connectivity with other tools.
1 INTRODUCTION
Many MAS platforms are currently available to
developers, these platforms vary in their range of
capabilities, the facilities they offer and their notions
of agency. Some platforms concentrate on support
for BDI agents (Mascardi et al, 2005), others on
mobility (Cabri et al, 2006; Suna & Fallah-
Seghrouchni, 2005), others intend to be more
general purpose (Bellifemine et al, 2008). Some
platforms provide programmer support in the form
of debuggers and developer tools, others do not
(Bordini et al, 2006). With the exception of MadKit
(Gutknecht & Ferber, 2000), none of the platforms
we surveyed allowed system developers to modify
the underlying behaviour of the platform or adapt
the functions of its middleware. This inflexibility
has been noted by other authors (eg: Fonseca, 2006).
For MAS developers this means that they can build
systems on top of platforms but in doing so must
work within the constraints imposed by the platform
they are using.
Some authors have suggested building MAS
platforms using modifiable components. Kind and
Padget suggested meta-agents (Kind & Padget,
1999) and others have discussed the use of meta-
actors for middleware (Sen & Agha, 2002). This
work may have influenced the design of some MAS
platforms (Mulet et al, 2006) but meta-agent design
patterns are not an area for significant investigation
in the agent research community; there has been
little discussion of the way meta-agents are
constructed and the ways they may be reconfigured
to provide multiagent platforms and middleware
with differing capabilities. Not only that but MAS
platforms do not present their users with a meta-
agent layer but instead provide a rigid structure for
their middleware which imposes various limitations
and may predetermine the system architecture, the
nature of communication channels and/or the scale
of platform's middleware.
MadKit, built from a kernel of low-level agents,
was presented as an exception to this norm,
providing an extensible platform which could be
customised by its users (Gutknecht & Ferber, 2000).
Although it was not widely adopted as a base-layer
or middleware solution the wide-ranging potential of
MAS suggests that the use of a meta-agent micro-
kernel is worth further study.
Our main aim is to use configurations of meta-
agents to support distributed systems of application-
level agents and to consider how changing the
organisation of these meta-agents produces MAS
platforms with differing behaviours. To this end we
investigate using meta-agents to provide a generic
but extensible middleware which may be
reconfigured to suit the requirements of individual
applications or their deployment needs.
In this paper we build a small set of primitive
meta-agents and show how they can be organised
into different configurations. These configurations,
which are themselves distributed systems of meta-
agents, form platforms to support application-level
385
Lynch S..
USING META-AGENTS TO BUILD MAS MIDDLEWARE.
DOI: 10.5220/0003149603850388
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 385-388
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

agents. The differences in configurations produce
adaptations in the characteristics of the underlying
systems which change the behaviour of applications
built on them.
We show how meta-agents can be constructed
from a small set of language-level primitives and
investigate how they can be used to support
strategies for communication between application
agents in a distributed environment as well as the
behaviour of those agents. The resulting meta-agent
configurations provide adaptable middleware
solutions for application MAS. The design lends
itself for implementation in various languages and
permits easy connectivity with other systems, we
have successfully used the design to build platforms
in Java, Lisp and C# and have developed links to
Galaxy, .NET and JADE.
2 A META-AGENT SUBSYSTEM
Conceptually each application agent rests on a small
set of interconnected and interacting meta-agents
which provide the application agent with its abilities
to encapsulate behaviour and to communicate. In a
distributed environment agents may reside on
different physical or virtual machines. Our aim is for
meta-agents to be light-weight and offer maximum
opportunity for reuse and reconfiguration so we
separate the functions of behaviour and
communication into different meta-agent classes. In
the following discussion a Portal is defined as a
specialisation of meta-agent which provides
communication between agents and a socket-agent is
another specialisation of meta-agent which routes
messages between machines through a socket.
For the purposes of our discussion here we
consider meta-agents to be small autonomous
software entities which (i) operate in their own
process thread and can thereby be concurrently
active with other meta-agents (ii) have an inward
communication stream capable of queuing incoming
messages (iii) can encapsulate behaviour including
that which allows them to send massages to other
meta-agents and manage deliberation cycles.
The design of meta-agents is such that incoming
messages are queued until their thread is idle then
the least recent message is passed to the meta-agent
message-handler and its thread is rescheduled. The
message handler is used to encapsulate behaviour
which occurs in response to messages. Meta-agents
are specified as objects so the nature of this
behaviour is not restricted and may involve
modification of instance or environmental data.
Other details concerning the structure of agents,
the functions they may perform and the nature of
their inter-agent communication is left unrestricted.
A high-level (abstract) meta-agent can be
specified by extending the concept of a blocking
queue. A blocking is a queue which puts the current
thread into a waiting state if it is asked for data when
it is empty. Assuming the class blocking-queue
exists with the capability to enqueue and dequeue
data, meta-agents can be specified as shown below.
Instances of meta-agent have a name and a link to a
portal.
class meta-agent
extension-of: blocking-queue
variables: name, portal
constructor method( args... )
| super.constructor( args... )
| thread{ loop-forever
| msg-handler( dequeue() )}
method msg-handler( msg )
| ;; reactive behaviour to
messages
The construction/instantiation of a meta-agent
creates a new process thread for the agent which
continually extracts messages from the agent's queue
and passes them to its message handler, the reactive
behaviour for responding to messages is specified in
the message handler. The use of a single thread for
an agent ensures that messages it receives are
processed sequentially. A minor modification to
meta-agents allows them to process their messages
concurrently. To achieve this each msg-handler runs
its own thread.
Portals are meta-agents which manage
communication for other meta-agents so when one
agent sends a message to another it is sent via the
sending agent's portal. The message contains the
name of the agent which is to be its final recipient.
The agent's send-message method handles this as
follows:
meta-agent.send-message(recipient, msg)
| portal.enqueue(
| wrap(name, recipient, msg)
For the sake of simplicity we assume here that all
meta-agents have locally unique names and portals
map these names onto agent instances in order to
forward messages onto the appropriate queue for any
agent (alternative arrangements of meta-agents can
be used to produce different white/yellow pages
systems but these are not discussed here). Note also
that the function wrap is used to pack the recipient
name and the message into a single, faceted form.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
386
Using portals allows meta-agents to
communicate with each other by names but removes
the need for them to locate each other since this
becomes the portal's responsibility. The simplest
specification for portal is as follows:
class portal extension-of: meta-agent
variables: routing-table
method msg-handler(msg)
| routing-table.get(
| recipient-of(msg)).enqueue(msg)
method add-agent( name, agent )
| routing-table.set( name, agent )
A portal's routing table is a hashing structure which
maps agent names onto their queues (or their agent
instances).
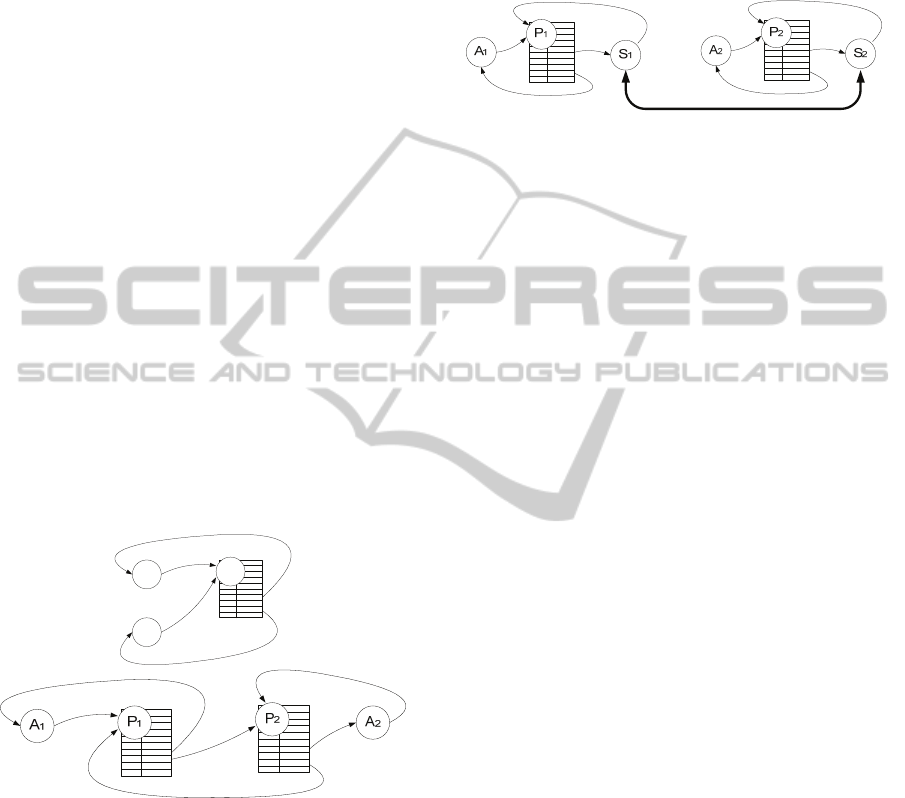
The specification of portal allows multiple agents
to share the same portal but since it also implicitly
allows portals to connect to other portals (by virtue
of them being defined as agents themselves) it also
allows each agent to have its own dedicated portal
This provides the flexibility to develop both peer-to-
peer architectures for agent communication or hub-
based architectures (or hybrid approaches) – see
Figure 1 where A1 and A2 are standard meta-agents
and P1 and P2 are portals depicted with their routing
tables, arrows indicate movement of message data
between components.
A1
A2
P1
Figure 1: Agents sharing a single portal (top) and with
independent portals (below).
A third genre of meta-agent is responsible for
handling communication between execution spaces
(physical or virtual machines). In this discussion we
use sockets for this and name the new meta-agent
socket-agent. The socket agent has input and output
streams, any data sent to it via its input stream will
be forwarded to its portal and its message handler
writes all messages to its output stream.
Since socket agents may be accessed by a portal's
routing table (like any other kind of meta-agent)
their specification now allows portals and the agents
attached to them to communicate between execution
spaces and between machines on a network (see
Figure 2 where S1 and S2 are socket agents and the
heavy line shows socket based communication).
Figure 2: Use of socket agents.
3 EVALUATION
We have used the meta-agents specified in this paper
to rebuild pre-existing middleware and MAS
platforms used in our institution, successfully
developing meta-agent subsystems in Java, Lisp and
C# which allow distributed agents specified in
different languages to freely interact. These
subsystems have been further developed to link to
the Galaxy Communicator architecture .NET
services and JADE and have been successfully used
as stable platforms for larger scale MAS projects
involving multimodal dialog and other areas of
research.
Here we present various ways that meta-agent
subsystems can be extended and/or adjusted to
change their characteristics.
First: extending the meta-agent subsystem to
make it easier for users to specify application level
agents primarily requires additional classes for
application-agents and for portals to include some
utility methods to aid usability.
Second: modification to meta-agents allows us to
change the underlying virtual network architecture
for agent messaging. This is of interest since the
requirements for MAS deployed over long distance
networks or on mobile devices are different to those
deployed on a small local cluster of machines. This
approach allows us to construct (i) peer-to-peer
architectures, this is achieved by enforcing the
condition that each agent has its own portal which is
not shared directly with other agents (ii) a hub
architecture where behaviour and communication
are placed in different software components, with
agents managing behaviour and (as above) portals
managing communication (iii) tree and network
topologies which can be formed by connecting
portals in different configurations.
Third: with tree topologies it is possible to
introduce scoping rules for agents. Agents declare
USING META-AGENTS TO BUILD MAS MIDDLEWARE
387

their scope at registration, this scope can be
described as "global" or can name a portal. Global
agents are visible to all other agents (their details are
included in the routing-tables of all portals). This
behaviour can be achieved with minor modifications
to the agent registration system.
When the scope of an agent is declared with the
name of a portal, the agent is only visible to other
agents in the same tree/sub-MAS, the details of the
non-global agent are included only in the routing-
tables of portals in the same sub-MAS so only other
agents in this sub-MAS may send messages to the
non-global agent.
Fourth: despite the need for run-time analysis of
MAS, problems exist with trying to collect the
necessary run-time information. A possible solution
is to encourage/insist that programmers add code to
their agents to capture their run-time status at
specified points in execution and relay it to some
central monitoring system. However developers are
unlikely to comply and would need to operate
according to a set of standards which would impose
additional burdens on development.
A better solution may be obtained by using meta-
agents. Information about MAS structure can be
obtained by examining the details of agent
registration and messages exchanged between
application agents provide details/traces of system
activity. Since portals route various meta-data,
including that describing registration and user-agent
messaging, portals can be readily modified to
forward that meta-data to a monitoring system
without disrupting any other system activity.
In practice we implement the monitoring system
as its own MAS and modify the message receiver of
portals so the monitor is copied in to relevant
information.
4 CONCLUSIONS
This paper has highlighted a limitation with the
agent platforms and middleware which are currently
available – they are not designed to allow system
developers to modify their behaviour so cannot be
tailored to suit the needs of developers.
Influenced by related work on meta-agents and
actors we have specified a small set of meta-agents,
light-weight components which lend themselves to
modification and may readily be configured into
different patterns.
We have used patterns of interacting meta-agents
to form distributed subsystems which function as
MAS platforms and middleware. Different
configurations of these meta-agent patterns can be
made to exhibit different properties and influence
the characteristics of the resulting platforms they
produce thereby providing adaptable frameworks for
a variety of MAS applications.
REFERENCES
Bellifemine, F., Caire, G., Poggi, A., and Rimassa, G.
2008. JADE: A software framework for developing
multi-agent applications. Lessons learned. Inf. Softw.
Technol. 50, 1-2 (Jan. 2008), 10-21.
Bordini, R., Braubach, L., Dastani, M., Seghrouchni,
A.E.F., Gomez-Sanz, J.J., Leite, J., O'Hare, G.,
Pokahr, A., and Ricci, A. “A Survey of Programming
Languages and Platforms for Multi-Agent Systems”.
Informatica, 2006, 30(1), 33-44.
Cabri, G., Ferrari, L., Leonardi, L. and Quitadamo, R.
2006. Strong Agent Mobility for Aglets Based on the
IBM JikesRVM. ACM symposium on Applied
computing (Dijon, France) ACM.
Fonseca, S. P. 2006. Engineering degrees of agency.
Proceedings of Software engineering for large-scale
multi-agent systems, SELMAS (Shanghai, China,
2006) ACM Press, New York, NY.
Giret, A. and Botti, V., “Holons and Agents”, Journal of
Intelligent Manufacturing 2004, Vol. 15 No.5 pp. 645-
659. Springer Netherlands.
Gutknecht, O. and Ferber, J. The Mad Kit Agent Platform
Architecture. In Infrastructure for Agents, Multi-agent
Systems, and Scalable Multi-agent Systems, 3-7,
(2000).
Kind, A. and Padget, J. Towards Meta-Agent Protocols,
LNCS 1624, 30-42, 1999.
Mascardi, V., Demergasso, D. and Ancona, D. 2005.
Languages for Programming BDI-style Agents: an
Overview. In Proceedings of WOA (Camerino, Italy,
2005). Pitagora Editrice Bologna.
Massonet, P., Deville, Y., and Neve, C. 2002. From AOSE
Methodology to Agent Implementation. In
Proceedings of AAMAS (Bologna, Italy, 2002) ACM
Press, New York, NY.
Mulet, L, Such, J M. and Alberola, J M., Performance
evaluation of open-source multiagent platforms.
AAMAS (Japan) ACM Press, New York, NY, 2006.
Sen, K., Agha, G., "Thin Middleware for Ubiquitous
Computing," Process Coordination and Ubiquitous
Computing, CRC Press, 2002.
Suna, A. and Fallah-Seghrouchni, A., E. 2005. A Mobile
Agents Platform: Architecture, Mobility and Security
Elements. LNCS, 3346 / 2005, 126-146.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
388
