
HIGHER-ORDER REPRESENTATION AND REASONING FOR
AUTOMATED ONTOLOGY EVOLUTION
Michael Chan, Jos Lehmann and Alan Bundy
School of Informatics, University of Edinburgh, 10 Crichton Street, Edinburgh, U.K.
Keywords:
Ontology, Automated ontology evolution, Ontology conflict detection, Higher-order logic, Ontology repair
plans, Isabelle/HOL, Development graphs, GALILEO.
Abstract:
The GALILEO system aims at realising automated ontology evolution. This is necessary to enable intelligent
agents to manipulate their own knowledge autonomously and thus reason and communicate effectively in open,
dynamic digital environments characterised by the heterogeneity of data and of representation languages. Our
approach is based on patterns of diagnosis of faults detected across multiple ontologies. Such patterns allow
to identify the type of repair required when conflicting ontologies yield erroneous inferences. We assume that
each ontology is locally consistent, i.e. inconsistency arises only across ontologies when they are merged
together. Local consistency avoids the derivation of uninteresting theorems, so the formula for diagnosis can
essentially be seen as an open theorem over the ontologies. The system’s application domain is physics;
we have adopted a modular formalisation of physics, structured by means of locales in Isabelle, to perform
modular higher-order reasoning, and visualised by means of development graphs.
1 INTRODUCTION
Artificial intelligence and, more generally, computer
science are presently faced with the challenge that au-
tonomous software agents must be able to manipulate
their own knowledge. Such knowledge is typically
represented in an ontology that conceptualises the en-
tities of the software’s application domain and allows
the software to reason about such entities at a higher
level of abstraction than simply the level of data or
information. Just like any abstract model, ontologies
are limited representations of the world, which is dy-
namic and inherently complex. If autonomous sys-
tems are to deal with such dynamics, they must be
able to autonomously update their own ontologies.
The process of updating an ontology in the face
of new information is often called ontology evolu-
tion. The literature on the subject mostly concentrates
on the evolution of ontologies coded in Description
Logic for Semantic Web applications (Bundy et al.,
2009). The primary accent is on defining logical no-
tions and/or methods to enable a user to maintain the
consistency of an ontology either through its lifecy-
cle or in relation to other ontologies. The former
case is often related to ontology debugging and yields
notions like conservative extensions (Ghilardi et al.,
2006), belief revision (Katsuno and Mendelzon,
1991) interactive ontology evolution (Stojanovic
et al., 2002), inconsistency repair (Kalyanpur
et al., 2006; Lam et al., 2008; Ovchinnikova and
K
¨
uhnberger, 2007). The case of multiple ontolo-
gies is often related to ontology alignment and yields
notions like mapping (Kalfoglou and Schorlemmer,
2003), matching (Doan et al., 2004; Giunchiglia and
Shvaiko, 2004), or contextualisation. Despite these
valuable research efforts on the dynamics of ontolo-
gies, we know of relatively few works that have
explicitly considered the problem of applying auto-
mated mechanisms to repair locally consistent but
globally inconsistent ontologies. In this type of sit-
uations belief revision may be insufficient to resolve
conflicts between ontologies and the very signature of
their representation language may need to be evolved.
This opens up many kinds of syntactical manipula-
tions, including splitting a function into parts and
changing the arity of a function. An attempt at this
kind of automated ontology evolution is described in
(McNeill and Bundy, 2007), which investigates an en-
vironment in which agents with slightly different on-
tologies interact with each other. The main goal of the
described system, the GALILEO System, is to iden-
tify and repair ontological mismatches arising from
the heterogeneity in the underlying logical represen-
tation, e.g., arity mismatches.
84
Chan M., Lehmann J. and Bundy A..
HIGHER-ORDER REPRESENTATION AND REASONING FOR AUTOMATED ONTOLOGY EVOLUTION.
DOI: 10.5220/0003097800840093
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2010), pages 84-93
ISBN: 978-989-8425-29-4
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

In our view the limited progress in automated on-
tology evolution described above depends on two cir-
cumstances. On the one hand, most of the works ad-
dress interactive ontology evolution driven by user’s
instructions. This choice is a pragmatic one, dic-
tated by the need to support ontology developers in
their work, rather than by a quest for automation. In
many cases, though, that is not enough because what
is actually required is ontology evolution at runtime
performed, for instance, by autonomous agents that
communicate with each other in heterogeneous envi-
ronments, including the Semantic Web. On the other
hand, the focus on ontologies coded in Description
Logics does not allow for a sufficiently generic analy-
sis and resolution of ontological inconsistencies, even
when an approach aims at automating, for instance,
the integration of changes in ontologies. As a mat-
ter of fact, the limited expressivity of first-order or
lesser logics constitutes a limit on the possibility of
modelling the ontology evolution process in the same
language in which the ontology is coded. Being im-
possible to quantify over, and thus, to reason about,
the predicates, the relations and the functions of the
ontology, it is very problematic to formalise and im-
plement a sufficiently generic ontology evolution pro-
cess.
We therefore turned to study automated (as op-
posed to user-assisted) ontology evolution using
higher-order logic (HOL), which provides the ben-
efit of making it possible to express sufficiently
generic patterns of evolution. In the framework of
the GALILEO system (Bundy and Chan, 2008; Chan
and Bundy, 2008), a number of so-called ontology
repair plans (ORPs) are being developed and imple-
mented in HOL. These mechanisms compile together
patterns for diagnosis of conflicts between ontologies
and transformation rules for effecting repairs. For
both development and testing, we rely on examples
of ontology evolution in physics. Many seminal ad-
vances in physics are results of ontology evolution, as
physicists revise predictive theories when confronted
with conflicting experimental evidence. Therefore, in
ORPs developed thus far, one of the ontologies rep-
resents a predictive theory; a second ontology repre-
sents a sensory or experimental set-up for that the-
ory. When the sensory ontology generates a theorem
that contradicts a theorem of the theoretical ontology,
an ORP is triggered and amends the two ontologies.
ORPs may act either as belief revision mechanisms or
as signature revision mechanisms or both. Working
in HOL provides the additional benefit of formalising
concepts and their relationships with a highly expres-
sive representation. We believe this is desirable, be-
cause physics concepts are often naturally represented
Suppose we have an ontology O
t
representing the cur-
rent state of a predictive physics theory and an ontol-
ogy O
s
representing some sensory information arising
from an experiment. Suppose these two ontologies
disagree over the value of some function stuff when it
is applied to a vector of arguments
~
s of type
~
τ. stuff (
~
s)
might, for instance, be the total energy of a ball or the
orbit of a planet.
Trigger: If stuff (
~
s) has two different values in O
t
and
O
s
then the following formula will be triggered,
identifying a potential contradiction between the-
ory and experiment.
O
t
` stuff (
~
s) = v
1
(1)
O
s
` stuff (
~
s) = v
2
(2)
O
t
` v
1
6= v
2
(3)
where O ` φ means that formula φ is a theorem of
ontology O.
Figure 1: Trigger of the “Where’s My Stuff?” ontology
repair plan.
as HOL objects, e.g., the orbit of a star, the rate of
change in a quantity, etc.
In this paper we discuss the diagnostic mech-
anism of the ORP called Where’s my stuff? (WMS)
(Bundy and Chan, 2008). WMS is triggered when the
predicted value returned by a function, which we call
stuff , conflicts with the observed value of the same
function. The trigger formulae of WMS are formalised
in Figure 1. The purpose of WMS is to amend the
signature of two conflicting ontologies by redefining
the function that computes the quantity that is sub-
ject to contradiction and that instantiates the higher
order variable stuff . In practice, WMS deploys an
addition-strategy that is quite common in physics.
For instance, in order to account for unpredictable
yet observed gravitational behaviours in the orbit of
a planet or in the stellar orbital velocity in a galaxy,
astronomers often postulate the presence of an addi-
tional unobserved planet or, resp., of dark matter. Ac-
cordingly, WMS redefines the contradictory function
(in the examples, the functions orbit, resp., orbital ve-
locity) as the sum of a visible part (i.e. the amount
calculated by the original function) and an invisible
part (i.e. the amount that can only indirectly be ob-
served). For WMS’s repair operation to be triggered,
its diagnostic mechanism must have individuated the
function stuff and assessed a contradiction between
the value of stuff in the theoretical and the sensory
ontologies.
HIGHER-ORDER REPRESENTATION AND REASONING FOR AUTOMATED ONTOLOGY EVOLUTION
85
The workings of such diagnosis allow us to illus-
trates two points about using a higher-order approach
for ontology evolution:
1. The polymorphism of stuff , as well as of other
symbols like =, 6=, <, −, etc. permits the gen-
erality of WMS and its applicability over disparate
cases.
2. The use of a higher-order theorem prover like Is-
abelle (Paulson, 1994), allows reasoning over lo-
cally consistent but globally inconsistent ontolo-
gies that share variables.
More strongly, these two points are important re-
sults for both ontology evolution and automated theo-
rem proving, and they represent the main contribution
of this paper. They show that current interactive the-
orem proving technology is capable of inferring the
trigger formulae used in ontology repair plans, despite
their problematic features described above.
The rest of the paper is structured as follows: §2
gives an overview of two examples of ontology evolu-
tion in physics that are used in subsequent sections to
evaluate the proposed approach to the representation
and reasoning for ontology evolution; §3 describes
the structure of the ontological representation and the
specific axioms of the theoretical and sensory ontolo-
gies; and, §4 highlights the advantages of detecting
conflicts between ontologies using HOL. Note that
details of ontology repair procedures are not covered
in this paper; we refer interested readers to (Bundy
and Chan, 2008; Chan and Bundy, 2008) for more
complete presentations.
2 TWO EXAMPLES OF
ONTOLOGY EVOLUTION IN
PHYSICS
In this paper, we base our evaluation of the represen-
tation of knowledge and reasoning on two examples
of ontology evolution in physics: the bouncing-ball
paradox and the proposed existence of dark matter.
Both cases can be emulated by WMS.
The bouncing-ball paradox, as described in
(diSessa, 1983), involves dropping a ball from a
height above ground and calculating its total energy
as the sum of its kinetic energy, which is a function of
the ball’s velocity, and of its potential energy, which
is a function of its height on the ground. The initial
amount of total energy of the ball is greater than zero
because of its positive amount of potential energy. If
the amount of total energy is defined as a summation
of kinetic and potential energies, the final amount of
total energy of the ball will then be zero Joules be-
cause of its zero velocity and zero height at ground
level. The paradox is exactly the contradiction be-
tween the initial and final amounts of total energy of
the ball: the law of conservation of energy requires
such amounts to be the same. WMS emulates the usual
solution to the paradox and adds to the function that
computes the total energy of the ball a third compo-
nent, for elastic energy. This is the type of energy
to which the ball’s kinetic energy is transformed at
the time of impact with the ground. This solution is
equivalent to re-idealising the ball as a spring rather
than as a particle.
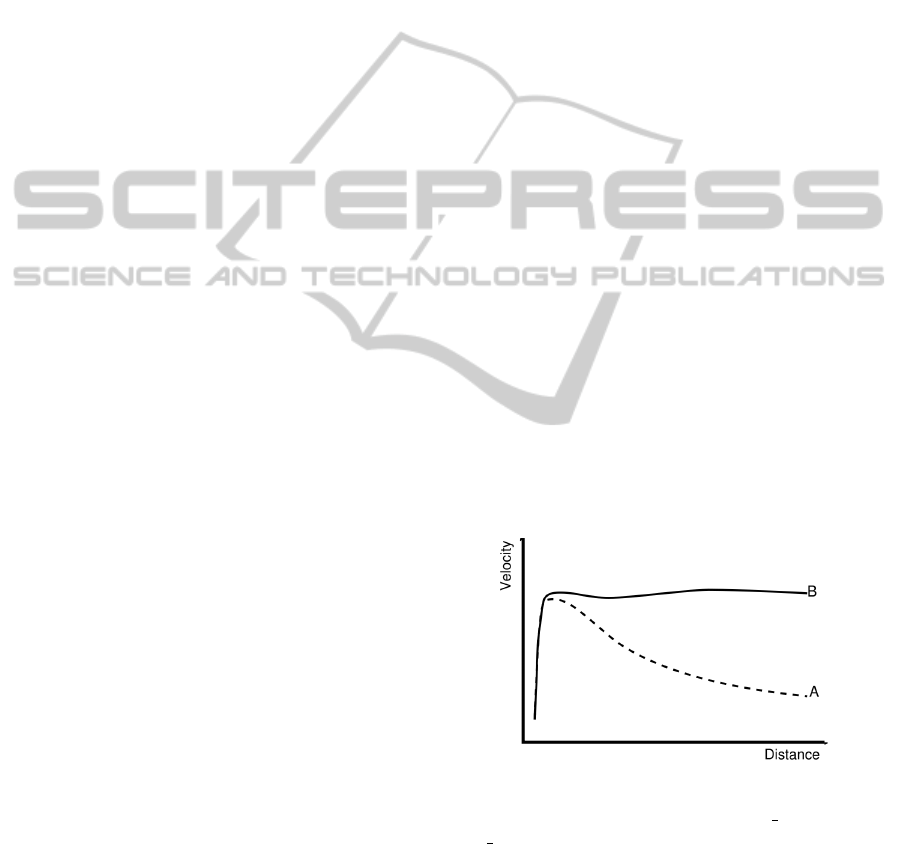
In the case of the hypothetic existence of dark mat-
ter, the evidence for it comes from various sources,
for instance, from an anomaly in the orbital veloc-
ities of stars in spiral galaxies identified by Rubin
in 1975. Given the observed distribution of mass in
these galaxies, we can use Newtonian Mechanics to
predict that the orbital velocity of each star should
be inversely proportional to the square root of its
distance from the galactic centre (called its radius).
However, observation of these stars show their orbital
velocities to be roughly constant and independent of
their radius. Figure 2 illustrates the predicted and ac-
tual graphs. In order to account for this discrepancy
it is hypothesed that galaxies contain an invisible halo
of, so called, dark matter which does not radiate and
can only be measured indirectly. Accordingly WMS
adds to the function that computes the stellar orbital
velocity a second component that depends on dark
matter.
This diagram is taken from
http://en.wikipedia.org/wiki/Galaxy rotation
problem. The x-axis is the radii of the stars
and the y-axis is their orbital velocities. The
dotted line (A) represents the predicted graph
and the solid line (B) is the actual graph that
is observed.
Figure 2: Predicted vs Observed Stellar Orbital Velocities.
KEOD 2010 - International Conference on Knowledge Engineering and Ontology Development
86
In the next sections we discuss how the physics
knowledge underlying these two cases can best be
represented in FOL and HOL, respectively, in order
for a HOL-theorem prover like Isabelle to diagnose
the contradiction between what is expected and what
is observed.
3 ONTOLOGICAL
REPRESENTATION OF
PHYSICS
The language physicists use for expressing relation-
ships between concepts is largely based on mathemat-
ics rather than on an expressive logic. It is one of
our contributions in this project to provide a logical
formalisation of physics formulae and historical ex-
amples of ontology evolution. As already mentioned,
the need for evolution arises when experimental ob-
servations contradict theoretical predictions; thus, to
formalise such situations, the predictive theory and
sensory data are encapsulated in separate ontologies,
which we call O
t
and O
s
respectively. Such modular
representation, though basic, provides a range of ben-
efits, including better control of contradiction, more
focused effects of repair, variable certainty and in-
creased reusability. To further modularise the existing
knowledge representation, the physics and mathemat-
ical theories can be partitioned into small ontologies.
Each ontology resembles a small context, e.g., some
treatment of physics may depend on separate ontolo-
gies for a formal theory and for a naive theory of ge-
ometry, which only covers 2-D spaces. Certainty fac-
tors can be assigned to an ontology, determining the
vulnerability of the theory or experiment to repair. For
instance, the ontology of a controversial theory could
be valued at a lower confidence than an established
one. The structure used for storing and managing
the ontologies should therefore be able to accommo-
date a sufficiently large collection of partitioned on-
tologies because even fundamental ontologies them-
selves, e.g., Newtonian Mechanics, arithmetic, etc.,
may be represented as a collection of smaller ontolo-
gies. That said, the structure should also support the
management of relations and dependencies between
ontologies and their terms.
3.1 Modular Representation as a
Development Graph
For the storage and management of the collection
of ontologies, we use a formal logical representation
called development graphs (Autexier et al., 1999), in
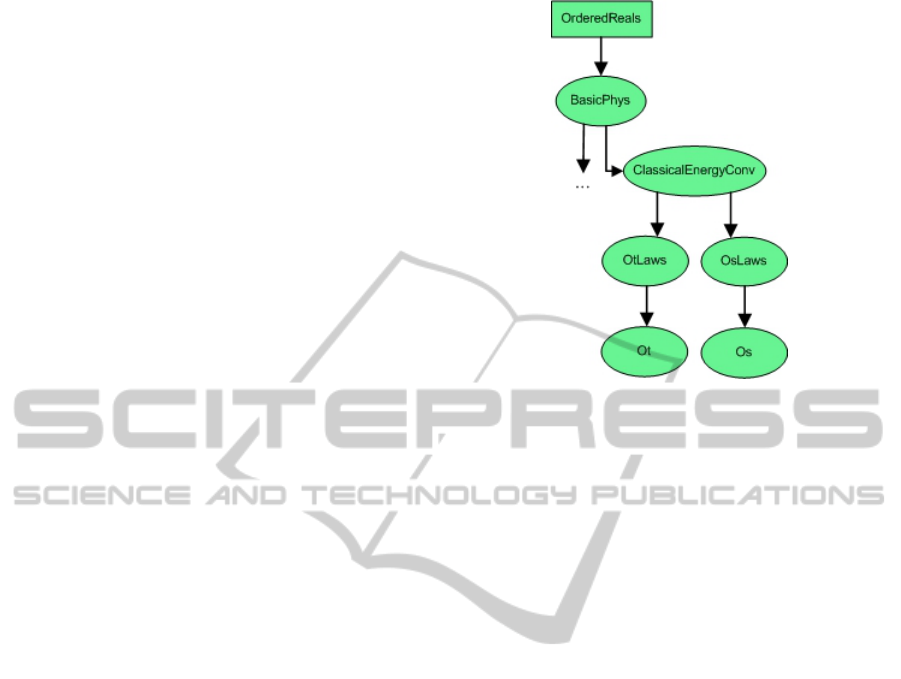
Figure 3: Development graph for the bouncing-ball para-
dox.
which nodes and links correspond to ontologies and
morphisms, respectively. A logical theory (in our
case, an ontology) is characterised by a node, which
can be defined to import signatures and axioms from
other nodes via definitional links. As will be de-
scribed later, the ontologies are formalised as locales
(Ballarin, 2004) in Isabelle, which are mechanisms
for performing modular reasoning; each locale corre-
sponds to a node in the development graph. There are
also other types of morphisms implemented, the de-
tails of which are not covered in this paper. Develop-
ment graphs are not only useful for formalisation of
ontologies, but also for visualisation of the relations
between ontologies and the complete structure. De-
velopment graphs are already implemented in HETS
(Mossakowski et al., 2007), which is a system for the
analysis of various specification languages.
3.1.1 Example Representation
To provide a visualisation of the structure of the on-
tologies for the model of the bouncing-ball para-
dox, Figure 3 depicts a development graph con-
taining the relevant ontologies (nodes) and defini-
tional links (arcs); it is an illustration of the de-
velopment graph visualised in HETS. In this rep-
resentation, the top ontology BasicPhys contains
the fundamental concepts in physics, e.g., time and
events. It extends from OrderedReals, which is
an internal specification of reals with ordering. The
node ClassicalEnergyConv contains types specific
to energy conversion, e.g., those for various types
of energy, including total energy, kinetic energy,
and potential energy, but not the theories describ-
HIGHER-ORDER REPRESENTATION AND REASONING FOR AUTOMATED ONTOLOGY EVOLUTION
87

ing the conversion between types of energy. Note
that it extends from BasicPhys, so all sorts (types)
and operations, if any, are directly imported. Fol-
lowing the path down, the node OtLaws contains
the theory of energy conversion for particles (with-
out extent) between kinetic and potential energies
for all objects and time moments, i.e. ∀o:Ob j,t :
Time. TE(o,t) = KE(o,t) + PE(o,t); that is, it pre-
dicts that potential energy can be converted to only
kinetic energy because elastic and other types of
energy are neglected. Moreover, it contains def-
initions as well, e.g., ∀o.Ob j,t.Time. KE(o,t) =
1
2
Mass(o,t).Vel(o,t)
2
. The theoretical ontology Ot
extends from OtLaws, which imports the same predic-
tive theory as that in OtLaws. In addition, it contains
axioms specifying that the initial velocity is zero and
the height is greater than zero. In contrast, the sen-
sory ontology Os extends from OsLaws, which itself
extends from ClassicalEnergyConv. OsLaws con-
tains similar axioms as OtLaws, but at a lower level of
generality. The axioms of OsLaws cover only the spe-
cific entities and events involved in the experiment,
e.g., T E(ball,End(drop)) = KE(ball,End(drop))+
PE(ball,End(drop)) which restricts the definition to
the particular ball being dropped and the particular
dropping event involved. Os, unlike Ot, contains ax-
ioms specifying that the final height and velocity are
both zero.
The development graph of the dark matter exam-
ple exhibits a similar structure, so it is omitted to
avoid repetition.
3.2 Axiomatisations of Theoretical and
Sensory Ontologies
Representational choices need to be made regarding
the axiomatisations of O
t
and O
s
. The ontological
representation of the predictive theory as O
t
is rel-
atively straightforward as O
t
requires access to the
same physics laws as those needed in the case study,
which are encoded as axioms; the axioms are con-
tained in O
t
Law, but are exported to O
t
. As briefly
described already, O
s
has access to the same axioma-
tised laws in O
t
, but with lesser generality; these are
contained in O
s
Law, but are exported to O
s
. Instead
of expressing the laws over the entire relevant do-
main, the domain of quantification in O
s
is specific to
the entities involved in the experiment. Therefore, O
s
makes a lesser commitment than O
t
because it com-
mits itself only to the entities of the experiment. For
the bouncing-ball paradox, the axioms of the O
t
and
O
s
are:
Ax(O
t
) ::= {
∀p:Part,t
i
,t
j
:Mom.TE(p,t
i
) = TE(p,t
j
),
∀p:Part,t:Mom. TE(p,t) = KE(p,t) + PE(p,t),
∀p:Part,t:Mom. KE(p,t) ::=
1
2
Mass(p,t).Vel(p,t)
2
,
∀p:Part,t:Mom. PE(p,t) ::= Mass(p,t).G.
Height(p,t)
}
Ax(O
s
) ::= {
TE(ball, End(drop)) = KE(ball,End(drop))+
PE(ball, End(drop)),
KE(ball, End(drop)) ::=
1
2
Mass(ball,End(drop)).
Vel(ball, End(drop))
2
,
PE(ball, End(drop)) ::= Mass(ball, End(drop)).G.
Height(ball, End(drop))
}
where TE(p,t), KE(p,t), and PE(p,t) respectively
denote the amount of total energy, kinetic energy, and
potential energy of an object p at a time moment t;
Mass(p,t) and Vel(p,t) respectively denote the mass
and velocity of p at t; G is the gravitational con-
stant; Start(drop) and End(drop) respectively denote
the start and end of the dropping of the ball.
For the dark matter case study, the axioms of O
t
and O
s
are:
Ax(O
t
) ::= {
∀o:Obj, g:Galaxy. AngVel(o, g) =
OrbVel(o, g)
Rad(o,g)
, (4)
∀o:Obj, g:Galaxy. Rad(o,g) > 0, (5)
∀o:Obj. GraphA(o) = (Rad(o, MWay), (6)
AngVel(o,MWay).Rad(o,MWay))
}
Ax(O
s
) ::= {
∀o:Obj. AngVel(o,MWay) =
OrbVel(o, MWay)
Rad(o,MWay)
,
(7)
∀o:Obj. Rad(o, MWay) > 0, (8)
∀o:Obj. GraphB(o) = (Rad(o, MWay), (9)
OrbVel(o, MWay))
}
where AngVel(o, g) and OrbVel(o,g) respectively de-
note the angular and orbital velocities of an object o in
KEOD 2010 - International Conference on Knowledge Engineering and Ontology Development
88

the galaxy g; Rad(o,g) returns radius between o and
the centre of the galaxy g; and MWay is our galaxy,
Milky Way.
The representation of O
t
(and O
s
Laws) adopted
may appear ad-hoc as it requires O
s
to have access to
the same laws as O
t
but expressed at the lowest level
of generality. However, this reflects a situation where
the sensory data in O
s
is interpreted under the context
of the theory O
t
, so the data would be interpreted us-
ing the laws available in O
t
. The minimal exportation
of the theoretical laws, therefore, involves the same
laws but at the lowest level of generality. This inter-
pretation is analogous to a physicist’s making sense
of new sensory data in accordance to his/her current
physics theory and understanding of the initial exper-
iment setting. Of course, there are other alternative
representations that are worthy of further work, each
implying a different philosophy of the content of O
s
and of the set of deducible theorems:
(a) O
s
has access to the same axiomatised laws as
those imported by O
t
and have the same domain
of quantification, so O
s
has access to the same
physics as O
t
. One shortcoming of this represen-
tation is the loss of distinction between predictive
theory and mere experimental evidence. Adopt-
ing such representation is equivalent to modelling
the evolution of a physicist’s ontological under-
standing of physics when confronted by two con-
flicting sets of data.
(b) O
s
shares only the language of O
t
and does not
import any physics laws and definitions, so O
s
is a knowledgebase. In order to derive a contra-
diction between the two ontologies without los-
ing the distinction between them, the reasoning
mechanism must then be able to access both O
t
’s
and O
s
’s axioms. This is more general than those
described above because, in an environment in
which there are multiple theoretical ontologies
confronting the same O
s
, the deducible theorems
then depend on the axioms of the particular theo-
retical ontology.
(c) O
s
is not committed to share the language or the
axioms of O
t
, so this is the most general repre-
sentation. The terms in O
t
and O
s
still need to
be related in order to perform reasoning. One
approach is to introduce metal-level relations be-
tween terms across the two ontologies, perceiving
each as a different context (McCarthy and Buvac,
1998). The reasoning mechanism needs to ac-
count for both the meta-level relations between
terms and object-level formulation, which signif-
icantly increases the complexity of the task.
Undoubtedly, representation (c) is the most interest-
ing avenue given the potentially high level of exten-
sibility and generality. It is similar to the current
representation in the way that both address the need
for interpretation of the data in O
s
in the context of
O
t
. However, the required axioms for contextual rea-
soning in the current representation are explicitly en-
coded in OsLaws at the object-level, which can han-
dle only O
t
, whereas in (c) these may be represented
at the meta-level, which can handle multiple, arbitrary
contexts. That said, we believe the representation we
have currently adopted strikes a reasonable balance
between expressivity and complexity.
4 REASONING FOR
AUTOMATED ONTOLOGY
EVOLUTION
The initial reasoning step for ontology evolution is to
determine whether a conflict exists between the on-
tologies and which ontology repair plan should be
triggered. Without a robust and correct reasoning
mechanism, a repair plan could be triggered to mod-
ify an already correct ontology or might not be trig-
gered when it is supposed to be: giving rise to false-
positives and false-negatives, respectively. Using the
representation described previously in §3, the diag-
nosis can take place by translating nodes into logical
theories in the logic of a particular theorem prover and
then attempting to deduce trigger formulae in those
theories.
4.1 Detection of Conflicts between
Ontologies
If we reason with an inconsistent ontology, then every
formula is deducible in multiple ways, leading to an
explosion of provable theorems. Therefore, when we
prove whether a trigger formula is a theorem of some
given ontologies to detect a conflict between them, the
ontologies cannot be first merged.
For reasoning in both first-order and higher-order
logics, we use the interactive theorem prover Isabelle
because its emphasis on proving higher-order theo-
rems. Isabelle, although powerful, does not offer tools
tailored for reasoning with modular ontologies. For-
tunately, there are at least two workarounds for rea-
soning modularly without reverting to merging the ax-
ioms of the ontologies and giving rise to an inconsis-
tent set of axioms. One is to specify the ontologies
as separate Isabelle theories and another is to specify
them as separate locales (Ballarin, 2004), which are
mechanisms for defining local scopes in a proof. The
HIGHER-ORDER REPRESENTATION AND REASONING FOR AUTOMATED ONTOLOGY EVOLUTION
89

locales approach is more attractive because each of
our ontologies can be viewed as an individual context
and theorems can be proved in the context of a spec-
ified locale. That said, each locale corresponds to a
node in a development graph as each node represents
an ontology, which is analogous to a context. In this
section, we present the procedure for the diagnosis
of conflict in the bouncing-ball and dark matter case
studies. The type of conflict under scrutiny is that for-
malised in the WMS ontology repair plan (Bundy and
Chan, 2008), of which the trigger is specified in Fig-
ure 1. Note that some parts of the proofs are been
omitted due to space limitations.
4.1.1 By First-order Proof Calculus
To trigger WMS in the bouncing-ball paradox pre-
sented earlier, we need to show that (1), (2), and (3)
are deducible. The trigger formulae can be instanti-
ated with the following substitution:
{TE/stuff , hball,End(drop)i/
~
s,
TE(ball, Start(drop))/v
1
,0/v
2
}
With this substitution, the instantiated form of (1), (2),
and (3) is:
O
t
` TE(ball, End(drop)) = (10)
TE(ball, Start(drop))
O
s
` TE(ball, End(drop)) = 0 (11)
O
t
` TE(ball, Start(drop)) 6= 0 (12)
where, in physics terms, (12) comes from the initial
condition that the ball is suspended from a positive
height, (10) comes from the law of conservation of
energy so that the total amount of energy at the start
and at the end of the drop should be the same, and (11)
is deduced from the observation that at the end of the
drop both the velocity and the height of the ball are
zero. The representation of the paradox does not re-
quire quantification over functions, so first-order logic
is sufficient for the representation. To prove the trig-
ger formulae in this example, HOL is therefore used
to reason over FOL, as demonstrated in the Isabelle
proof below:
typedecl Obj
typedecl Event
types Energy = real Time = real
A constant for representing the ball
1
:
consts ball :: Obj
Each of the ontologies outlined in Figure 3 is spec-
ified as a locale. Locale BasicPhys corresponds to
1
a::τ denotes that a is of type τ.
the node BasicPhys in Figure 3, which represents an
ontology specifying the language of O
t
and O
s
:
locale BasicPhys =
fixes Vel :: "Obj ⇒ Time ⇒ real"
and Height :: "Obj ⇒ Time ⇒ real"
and Start :: "Event ⇒ Time ⇒ real"
...
The locale ClassicalEnergyConv corresponds
to the node ClassicalEnergyConv in the devel-
opment graph, which imports the signature from
BasicPhys and extends it with a language for rep-
resenting various types of energies:
locale ClassicalEnergyConv =
fixes TE :: "Obj ⇒ Time ⇒ real"
and KE :: "Obj ⇒ Time ⇒ real"
and PE :: "Event ⇒ Time ⇒ Energy"
...
Locale OtLaws corresponds to the node OtLaws
in the development graph and contains the axioms
constituting the definitions of total energy (without
elasticity), potential energy, kinetic energy, the law
of conservation of energy, and the gravitational con-
stant
2
:
locale OtLaws = BasicPhys +
assumes te: "TE p t = PE p t + KE p t"
and pe: "PE p t = Mass p×G×Height p
t"
and ke: "KE p t = 0.5×Mass p×Vel p
t×Vel p t"
...
Locale Ot corresponds to Ot and asserts the values
of the initial velocity, initial height, and mass of the
ball:
locale Ot = OtLaws +
assumes vinit: "Vel ball (Start drop)
= 0"
and hinit: "Height ball (Start drop)
> 0"
and mass: "Mass ball > 0"
Locale OsLaws corresponds to the node OsLaws
and represents an ontology containing axioms based
on the laws over a specific domain:
locale OsLaws = BasicPhys +
assumes te: "TE p t = PE p t + KE p t"
and pe: "PE p t = Mass p×G×Height p
t"
and ke: "KE p t = 0.5×Mass p×Vel p
t×Vel p t"
...
The locale Os corresponds to Os and asserts the
values obtained from observation, i.e. the final values
of the velocity, height, and mass of the ball:
2
If F is a function, F x denotes the application of F to x.
KEOD 2010 - International Conference on Knowledge Engineering and Ontology Development
90

locale Os = OsLaws +
assumes vfin: "Vel ball (End drop) =
0"
and hfin: "Height ball (End drop) =
0"
and mass: "Mass ball > 0"
To prove the trigger formulae in Figure 1, we need
to be able to deduce the total amount of energy from
basic quantities, e.g., velocity, height and mass. Is-
abelle has a rich library of mathematical theorems,
which significantly helps the rewriting of equations
and the substitution of values. Three theorems are
needed to be proven in the ontologies: one proposes
that there exists a moment when the final amount of
total energy is equal to the initial amount of total en-
ergy, the final amount of total energy is zero, and the
initial amount of total energy is not zero. Hence, the
first proof goal to be discharged is (1), which can be
proved using the instantiation (10):
lemma (in Ot) lem1: "TE ball (End drop)
= TE ball (Start drop)"
using cons by auto
theorem (in Ot) OtWMS1: "EX (stuff::?’a
⇒ ?’b) s v1. stuff s = v1"
proof (intro exI) qed (rule lem1)
The second proof goal to be discharged is (2),
which can be proved using the instantiation (11):
lemma (in Os) lem2: "TE ball (End drop)
= 0"
using mass vfin hfin te ke pe g
by auto
theorem (in Os) OsWMS1: "EX
(stuff::?’a=>?’b) s v2. stuff s = v2"
proof (intro exI) qed (rule lem2)
The final proof goal to be discharged is (3), which
can be proved using the instantiation (12):
theorem (in Ot) OtWMS2: "TE ball (Start
drop) 6= 0"
proof ... qed
4.1.2 By Higher-order Proof Calculus
The proposed existence of dark matter is a case study
which requires a higher-order representation. As de-
scribed earlier, since the two graphs in Figure 2 are
compared, function objects can be used to represent
graphs in the formulation. Formulae (1), (2), and (3)
can be instantiated with the following substitution:
{λs ∈ g. hRad(s),OrbVel(s)i/stuff ,
hMWayi/
~
s, Graph
p
/v
1
, Graph
a
/v
2
}
which gives the instantiated form of the trigger for-
mulae as follows:
O
t
` λs ∈ MWay. hRad(s), (13)
OrbVel(s)i = Graph
p
O
s
` λs ∈ MWay. hRad(s), (14)
OrbVel(s)i = Graph
a
O
t
` Graph
p
6= Graph
a
(15)
where OrbVel(s) is the orbital velocity of star s,
Rad(s) is the radius of s from the centre of the Milky
Way, and MWay is our own galaxy, represented as the
set of stars it contains. Formula (14) shows the pre-
dicted graph, Graph
p
: the orbital velocity decreases
roughly inversely with the square root of the radius
(see Figure 2). This graph is deduced by Newtonian
Mechanics from the observed distribution of the vis-
ible stars in the Milky Way. Formula (15) shows the
actual observed orbital velocity graph, Graph
a
: it is
almost a constant function over most of the values of s
(see Figure 2). Note the use of λ-abstraction to create
graph objects as unary functions. These two graphs
are unequal (15), within the range of legitimate ex-
perimental variation.
The following proof illustrates the power of using
Isabelle’s higher-order proof calculus to detect a con-
flict between the two HOL ontologies, which exhibits
a similar structure to the previous proof:
typedecl Obj
types Spiral = "Obj set" Time = real
A constant for representing the Milky Way:
consts MWay :: Spiral
Locale BasicPhys corresponds to BasicPhys in
the development graph, which represents the ontology
containing only the language of locales O
t
and O
s
in
this particular case study:
locale BasicPhys =
fixes OrbVel :: "Obj => Obj set ⇒
real"
and GrphP :: "Obj ⇒ real×real"
...
assumes cab: "∃ P. P 6= {} ∧ (∀x. x∈P
−→ CurveA x 6= CurveB x)"
and gcp: "GrphP = CurveP"
and gca: "GrphA = CurveA"
locale OtLaws = BasicPhys +
assumes radgtzero: "Rad p g > 0"
and ovabsov: "OrbVel p g = abs
(OrbVel p g)"
Locale Ot contains the defintion of angular veloc-
ity in terms of orbital velocity. it also asserts that its
graph is a plot of the product of angular velocity by
radius:
HIGHER-ORDER REPRESENTATION AND REASONING FOR AUTOMATED ONTOLOGY EVOLUTION
91

locale Ot = OtLaws +
assumes avel: "AngVel p g = OrbVel p g
/ Rad p g"
and ga: "GrphP p = (Rad p MWay,
AngVel p MWay × Rad p MWay)"
locale OsLaws = BasicPhys +
assumes radgtzero: "∀ p. p∈MWay −→ Rad
p MWay > 0"
and ovabsov: "∀ p. p∈MWay −→ OrbVel p
MWay = abs (OrbVel p MWay)"
Locale Os explicitly asserts that its graph is a plot
of the orbital velocity of stars in the Milky Way.
locale Os = OsLaws +
assumes gb: "GrphA p = (Rad p MWay,
OrbVel p MWay)"
Similar to the previous proof, the first proof goal
to be discharged here is (1), which can be proved us-
ing the instantiation (14):
lemma (in Ot) lem1: "(λ g s. (Rad s g,
OrbVel s g)) MWay = GrphP"
apply (simp add: expand_fun_eq)
...
theorem (in Ot) OtWMS1: "∃(stuff::?’a ⇒
?’b) s v1. stuff s = v1"
proof (intro exI) qed (rule lem1)
The second proof goal to be discharged is (2),
which can be proved using the instantiation (15):
lemma (in Os) lem2: "(λ g s. (Rad s g,
OrbVel s g)) MWay = GrphA"
using gb
by (simp add: expand_fun_eq)
theorem (in Os) OsWMS1: "∃(stuff::?’a ⇒
?’b) s v2. stuff s = v2"
proof (intro exI) qed (rule lem2)
The final proof goal to be discharged is (3), which
can be proved using the instantiation (15):
theorem (in Ot) OtWMS2: "GrphA 6= GrphP"
using cab gca gcp by auto
5 DISCUSSION
The two case studies presented have shown the bene-
fits of representing the predictive theory and the sen-
sory data as separate ontologies. By encoding each
ontology as an individual locale that is locally consis-
tent, each of the three parts of the WMS trigger formu-
lae is simply an open theorem of the relevant ontol-
ogy. If the two were merged, then there would be an
explosion of uninteresting theorems. Moreover, the
case studies have demonstrated the need for higher-
order logic and the power of using a higher-order the-
orem prover such as Isabelle for aiding automated on-
tology evolution. For example, Isabelle’s polymor-
phic meta-logic is particularly useful for the detection
of the trigger formula because stuff has a polymorphic
type a ⇒ b and, before diagnosis, how it is to be in-
stantiated is not known. An obvious advantage is that
the type of stuff is a variable, which provides a suffi-
ciently high level of generality in the trigger formula.
As shown in the proof for the bouncing-ball paradox,
stuff is instantiated by TE with type Ob j ⇒ Time ⇒
real, whereas in that for the existence of dark mat-
ter, stuff is instantiated by λs t.hRadius s t,Orb s ti
with type Ob j ⇒ real × real. Moreover, the proof of
the trigger formula (2) requires the comparision using
the equality and the inequality operators, which are
polymorphic as well. For example, real numbers and
functions are compared in the bouncing-ball and the
dark matter case studies respectively, so the operators
have defined meanings on reals in one scenario and
on functions in another.
On the representational aspect, if a less expressive
logic, e.g., DL or FOL, was adopted, it would be im-
possible to reason over function objects. Significant
changes to the representation would be required in or-
der to perform the described kind of reasoning. For
example, in the dark matter case study, the represen-
tation of the function of the orbit of a star could no
longer be a functional object, but a (possibly infinite)
set of positional points in a 3-D space, which we be-
lieve is unnatural.
6 CONCLUSIONS
Further progress in handling automated ontology evo-
lution is now urgent, due to the demand created by
multi-agent systems. We have outlined two main
challenges to the development of mechanisms sup-
porting automated ontology evolution, i.e. designing
a modular representation and performing reasoning
across modular ontologies. The latter imposes a rela-
tively greater challenge in our domain as it demands
an unusual use of higher-order theorem proving with
interactive provers. As described, a formal logical
structure is adopted to store and manage ontologies
and ontologies themselves are treated as expressive
logical theories. Evident by the two described exam-
ples from physics, our work is showing the advan-
tages of the unusual use of Isabelle for higher-order
reasoning with modular ontologies and the visualisa-
tion of the structure as a development graph.
KEOD 2010 - International Conference on Knowledge Engineering and Ontology Development
92

ACKNOWLEDGEMENTS
The research reported in this paper was supported by
EPSRC grant EP/E005713/1.
REFERENCES
Autexier, S., Hutter, D., Mantel, H., and Schairer, A.
(1999). Towards an Evolutionary Formal Software-
Development Using CASL. Lecture Notes In Com-
puter Science; Vol. 1827, pages 73–88.
Ballarin, C. (2004). Locales and locale expressions in
Isabelle/Isar. Lecture Notes in Computer Science,
3085:34–50.
Bundy, A. and Chan, M. (2008). Towards ontology evolu-
tion in physics. In Hodges, W., editor, Procs. Wollic
2008. LNCS, Springer-Verlag.
Bundy, A., J., L., Qi, G., and Varzinczak, I. (2009). Notes of
the ijcai-09 workshop on automated reasoning about
context and ontology evolution. AAAI Press.
Chan, M. and Bundy, A. (2008). Inconstancy: An on-
tology repair plan for adding hidden variables. In
Bringsjord, S. and Shilliday, A., editors, Symposium
on Automated Scientific Discovery, number FS-08-03
in Technical Report, pages 10–17. AAAI Press. ISBN
978-1-57735-395-9.
diSessa, A. (1983). Phenomenology and the evolution of in-
tuition. In Stevens, A. and Gentner, D., editors, Men-
tal Models, pages 15–33. Erlbaum.
Doan, A., Madhavan, J., Domingos, P., and Halevy, A.
(2004). Ontology matching: A machine learning ap-
proach. Handbook on Ontologies in Information Sys-
tems, pages 397–416.
Ghilardi, S., Lutz, C., and Wolter, F. (2006). Did I damage
my ontology? A case for conservative extensions in
description logic. Proceedings of the Tenth Interna-
tional Conference on Principles of Knowledge Repre-
sentation and Reasoning (KR-2006), pages 187–197.
Giunchiglia, F. and Shvaiko, P. (2004). Semantic matching.
The Knowledge Engineering Review, 18(03):265–
280.
Kalfoglou, Y. and Schorlemmer, M. (2003). Ontology map-
ping: the state of the art. The Knowledge Engineering
Review, 18(1):1–31.
Kalyanpur, A., Parsia, B., Sirin, E., and Grau, B. (2006).
Repairing unsatisfiable concepts in OWL ontologies.
In ESWC, pages 170–184. Springer.
Lam, J., Sleeman, D., Pan, J., and Vasconcelos, W. (2008).
A fine-grained approach to resolving unsatisfiable
ontologies. Lecture Notes in Computer Science,
4900:62.
McCarthy, J. and Buvac, S. (1998). Formalizing con-
text (expanded notes). Computing natural language,
81:13–50.
McNeill, F. and Bundy, A. (2007). Dynamic, automatic,
first-order ontology repair by diagnosis of failed plan
execution. International Journal On Semantic Web
and Information Systems, 3(3):1–35. Special issue on
ontology matching.
Mossakowski, T., Maeder, C., and L
¨
uttich, K. (2007). The
Heterogeneous Tool Set. In Grumberg, O. and Huth,
M., editors, TACAS 2007, volume 4424 of Lecture
Notes in Computer Science, pages 519–522. Springer-
Verlag Heidelberg.
Ovchinnikova, E. and K
¨
uhnberger, K. (2007). Auto-
matic Ontology Extension: Resolving Inconsisten-
cies. OTT’06, 1:93.
Paulson, L. C. (1994). Isabelle: A generic theorem prover.
Springer-Verlag.
Stojanovic, L., Maedche, A., Motik, B., and Stojanovic,
N. (2002). User-Driven Ontology Evolution Man-
agement. In Proceedings of the 13th International
Conference on Knowledge Engineering and Knowl-
edge Management. Ontologies and the Semantic Web,
pages 285–300. Springer-Verlag London, UK.
HIGHER-ORDER REPRESENTATION AND REASONING FOR AUTOMATED ONTOLOGY EVOLUTION
93
