
GENETIC ALGORITHM BASED ON DIFFERENTIAL
EVOLUTION WITH VARIABLE LENGTH
Runoff Prediction on an Artificial Basin
Ana Freire, Vanessa Aguiar-Pulido
Department of Comunications and Information Technologies, University of A Coruña
Campus Elviña s/n, A Coruña, Spain
Juan R. Rabuñal
Centre of Technological Innovation in Civil Engineering, University of A Coruña
Campus Elviña s/n, A Coruña, Spain
Marta Garrido
Water Engineering and Environmental Group, University of A Coruña
Campus Elviña s/n, A Coruña, Spain
Keywords: Differential evolution, Hydrology, Evolutionary computation.
Abstract: Differential evolution is a successful approach to solve optimization problems. The way it performs the
creation of the individual allows a spontaneous self-adaptability to the function. In this paper, a new method
based on the differential evolution paradigm has been developed. An innovative feature has been added: the
variable length of the genotype, so this approach can be applied to predict special time series. This approach
has been tested over rainfall data for real-time prediction of changing water levels on an artificial basin.
This way, a flood prediction system can be obtained.
1 INTRODUCTION
Differential evolution was firstly named in 1998 by
Kenneth Price and Rainer Storn (Storn and Price,
1997). This is a powerful evolutionary algorithm for
solving optimization problems over continuous
spaces. DE has been applied to several fields and its
good behaviour has become clear. The secret lies in
the way DE generates the population after each
generation (Storn and Price, 1997), (Feoktistov,
2006). This process uses three operators: mutation,
crossover and selection. The first two operators
generate the candidate vectors and the last one
decides which one enters the next generation.
1.1 Mutation
The population is initialized by a set of NP randomly
generated individuals (x
i,G
, i=1..NP). At each
generation, three mutually different individuals
(random vectors) are randomly chosen from the
population below (general mutation strategy). Then,
a mutant vector (v) is generated in the way written:
,
,
·
,
,
(1)
i=1...NP
The parameter F (scaling factor) tries to manage
the trade-off between exploitation and exploration of
the search space.
Although only one mutation scheme was
presented here, there are several ways of
implementing this operator. Depending on the
problem, one strategy will be more suitable than
others. Some research works (Qin et al., 2009)
alternate different strategies and parameter values on
different generations depending on the cost function
value.
In (Feoktistov, 2006) several strategies are
divided in four groups:
1. RAND group: the trial individual is generated
207
Freire A., Aguiar-Pulido V., Rabuñal J. and Garrido M..
GENETIC ALGORITHM BASED ON DIFFERENTIAL EVOLUTION WITH VARIABLE LENGTH - Runoff Prediction on an Artificial Basin.
DOI: 10.5220/0003081402070212
In Proceedings of the International Conference on Evolutionary Computation (ICEC-2010), pages 207-212
ISBN: 978-989-8425-31-7
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)

without any information about the values of the
objective function.
2. RAND/DIR group: strategies that use values of
the objective function to determine the good
direction.
3. RAND/BEST group: the best individual is used
to form the trial one.
4. RAND/BEST/DIR group: combines the
advantages of the last two groups.
The strategy to choose is always defined by the
problem and the concrete objective function.
1.2 Crossover
Once the mutant vectors have been generated, the
crossover is performed in order to intensify the
search inside a region. This step is performed based
on the crossover constant (CR), which is given a
random value between 0 and 1. Then, the trial
vectors are generated as follows:
,
,1
,
,
,
j=1...D (2)
1. D represents the dimensionality of the problem.
2. randb(j) generates a random number between 0
and 1for the j component.
3. rnbr(i) generates a number between 1 and D
which ensures that u
i,G+1
gets at least one parameter
from
i,G+1
.
1.3 Selection
Once these two operations have been performed, the
trial vector is compared to the target vector; if the
trial vector achieves a smaller cost function value, it
will be included in the next generation; otherwise,
the target vector will be kept.
The main idea of this approach is to adapt the
step length intrinsically along the evolutionary
process. As the evolution goes on, the population
converges and the step length becomes smaller.
2 MOTIVATION
Many problems need to calculate the parameters that
fit a function in order to establish a prediction based
on correlations. Therefore, a useful technique is to
consider a sliding window which includes some
prior values to the current one (t) in order to
calculate the next one (t+1). Time series prediction
is an example of this kind of problems.
If we want to apply the differential evolution
approach to this kind of problem, we must perform
an adaptation of the basic algorithm.
Therefore, this paper proposes a differential
evolution approach where the individuals can have
different lengths. On one hand, the length of the best
individual offers the size of the time window; on the
other hand, each gene corresponds to the coefficients
which weight each time t.
3 METHOD
Due to the variable genotype length approach,
several features were introduced apart from the
general search strategies described before.
Firstly, each individual can have different
lengths. This feature determines the mutation and
crossover operators, so the generic DE operators
must be changed as it is explained bellow.
With respect to the mutation operator, it includes
arithmetic operations to be executed over individuals
with different lengths. So, the following
considerations must be taken into account:
The smallest individuals will be completed with
zeros until they reach the length of the
corresponding individual which will be added,
subtracted or multiplied to. By completing with
zeros, the resultant vector does not differ so much
with respect to its predecessors.
Once the mutant vector is obtained, a mutation
length operator is applied with the aim of avoiding
the length increase resulting from the previous step.
This way, the mutant vector can keep or increase or
decrease its length in one unit. This new cell will
contain a random value. In future experiments, the
number of cells increased/decreased will be
introduced as a parameter in order to find the best
value.
A general scheme of the proposed mutation
scheme can be seen in Figure 1.
The crossover operator completes the length of
the target vector until the length of the target vector
is reached.
The selection operator is performed as it has
been explained before. The fitness function
penalizes the longest individuals adding the length
of the individual (weighted by an experimental
value) to the MSE. Longer individuals make the
equation more complex. Thus, small individuals are
more.
ICEC 2010 - International Conference on Evolutionary Computation
208

Figure 1: General scheme of the mutation process.
4 RESULTS
4.1 Problem Description
The method developed in this work was applied to
the field of Hydrology, more specifically, to the
prediction of the flow rate resulting from the rain.
Before explaining the results, several concepts must
be introduced (Dorado et al., 2003):
A river basin is an area drained by rivers and
tributaries. In the case of an urban basin, the streams
and rivers are replaced by a sewage system.
Run-off is the amount of rainfall that is carried
away from the river basin by streams and rivers.
The modelling of the run-off flow in a typical
urban basin is that part of hydrology which aims to
model sewage networks. Its objective is to predict
the risk of rain conditions for the basin and to sound
an alarm to protect from flooding or from
subsidence.
In general, the goal of this type of problem is to
predict and model the flow of a typical urban basin
from the rain collected by a sensor. The transference
function between the rainfall and the runoff has
many different conditions, as street slopes or roof
types. The system is of such variability that it
becomes impossible to define an equation capable of
modelling the course of a drop of water from the
moment it falls to the instant in which it enters the
drain network. The course of water through the
network is quite complex and, although there are
equations for modelling it, they are subject to the use
of adjustment parameters which make them depend
on a calibration process.
There are several methods for calculating the
rainfall-runoff process (Viessmann et al., 1989).
One family is based on the use of transfer
functions, usually called “unit hydrographs”
(Hydroworks, 1995).
Another approach is based on hydraulic
equations, whose parameters are fixed by the
morphologic characteristics of the study area
(kinematic wave). Commercial packs for calculating
sewage networks usually provide both “unit
hydrographs” and “kinematic wave” modules.
The use of calculation methods not based on
physics equations, such as Artificial Neural
Networks and Genetic Programming (Drecourt,
1999), is becoming widespread in various civil and
hydraulic engineering fields.
In order to make a solution for this problem, we
use a variant of an Autoregressive Moving Average
Model.
∑
∑
(3)
As we can see in (3) we need to search for the
optimal values of p (size of the input time window)
and q (size of the output time window) and for the
values of φ and θ coefficients. For this purpose, we
need a variable length codification of this problem.
4.2 Physical Model and Parameter
Configuration
In this work, synthetic data has been generated, by
simulating a rainfall scenario in a physic model done
GENETIC ALGORITHM BASED ON DIFFERENTIAL EVOLUTION WITH VARIABLE LENGTH - Runoff Prediction
on an Artificial Basin
209
to scale. It is placed in the Centre of Technological
Innovation in Civil Engineering (Cea et al., 2009).
This is an experimental model which simulates the
rainfall effect over a metallic structure like a basin.
This way, a superficial runoff is generated. This
experiment has been constructed in order to get an
equation for modelling the rainfall-runoff
transformation and then construct a virtual lab for
runoff predictions. Thereby, real experiments can be
avoided.
The constructed system is composed of these two
parts (Figure 2):
Metallic structure: with a 2.0x2.5m rectangular
plant. It is composed of three plans with a 5% slope
each (Figure 2).
Hydraulic system: metallic grid where the system
of rainfall simulation is fixed. It is composed of
polyethylene tubes connected to another one which
supplies the water.
Equipment for runoff register: test tube for more
than 30 litters which collects the outgoing water.
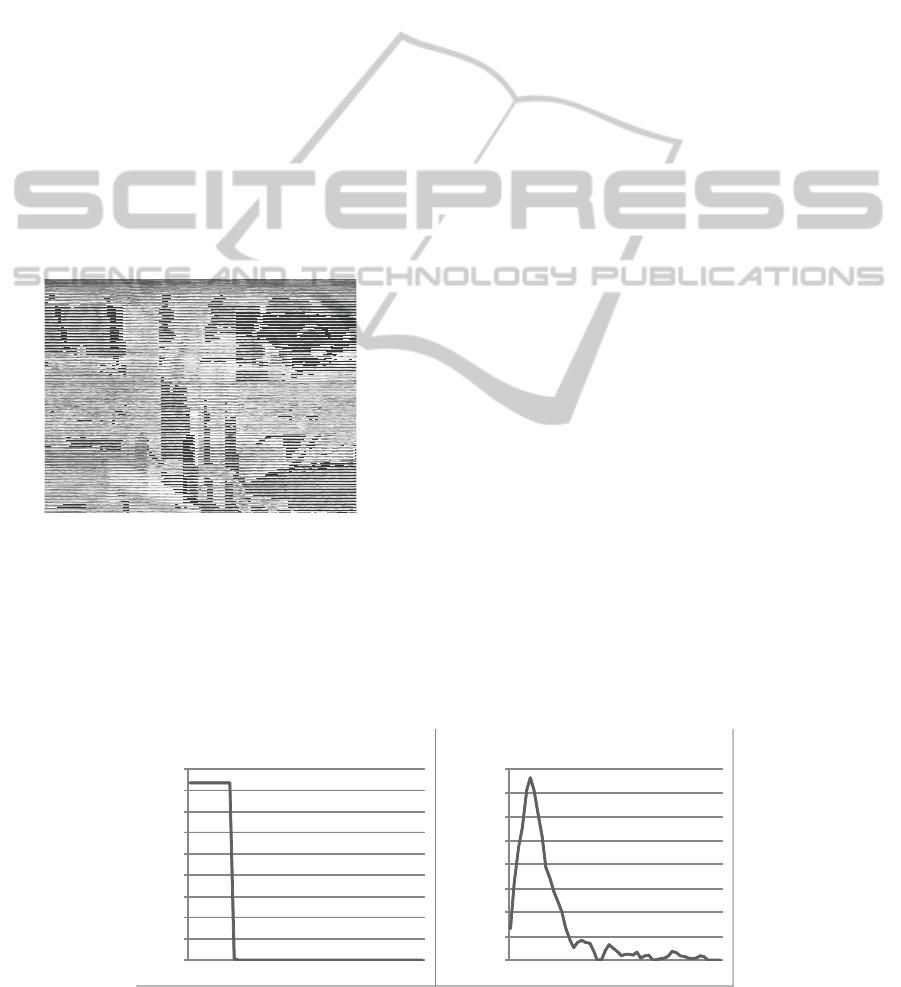
Figure 2: The experimental design in the laboratory.
The process consists in opening the
dissemination system for a specified period and then
measuring the runoff.
As a result, the two graphics in Figure 3 have
been obtained. The first one represents the rainfall
over the basin and the second one represents the
runoff.
The proposed algorithm has been adapted
according to the problem described before.
Firstly, the individuals were divided in two parts:
one representing the coefficients θ
i
(i=0..p) and
another one representing the coefficients φ
j
(j=1..q).
Due to the nature of the problem, it would be
meaningless to combine both parts in the same
evolution process. This way, each individual is
composed of two parts which evolve independently,
but the fitness takes into account both parts together.
Secondly, following the conclusions achieved in
(Qin et al., 2009) and (Mayer et al., 2004) and our
own experiments, the configuration parameters were
set as follows:
Population size (NP) = 500
Crossover rate (CR) = 0.3
Scaling Factor (F) = 0.5
The following strategy belongs to the
RAND/DIR group. Following the nomenclature
used in (Storn and Price, 1997), the chosen strategy
was DE/rand/2/bin. It consists in choosing five
random individuals and operating as follows (4):
,
,
·
,
,
,
,
(4)
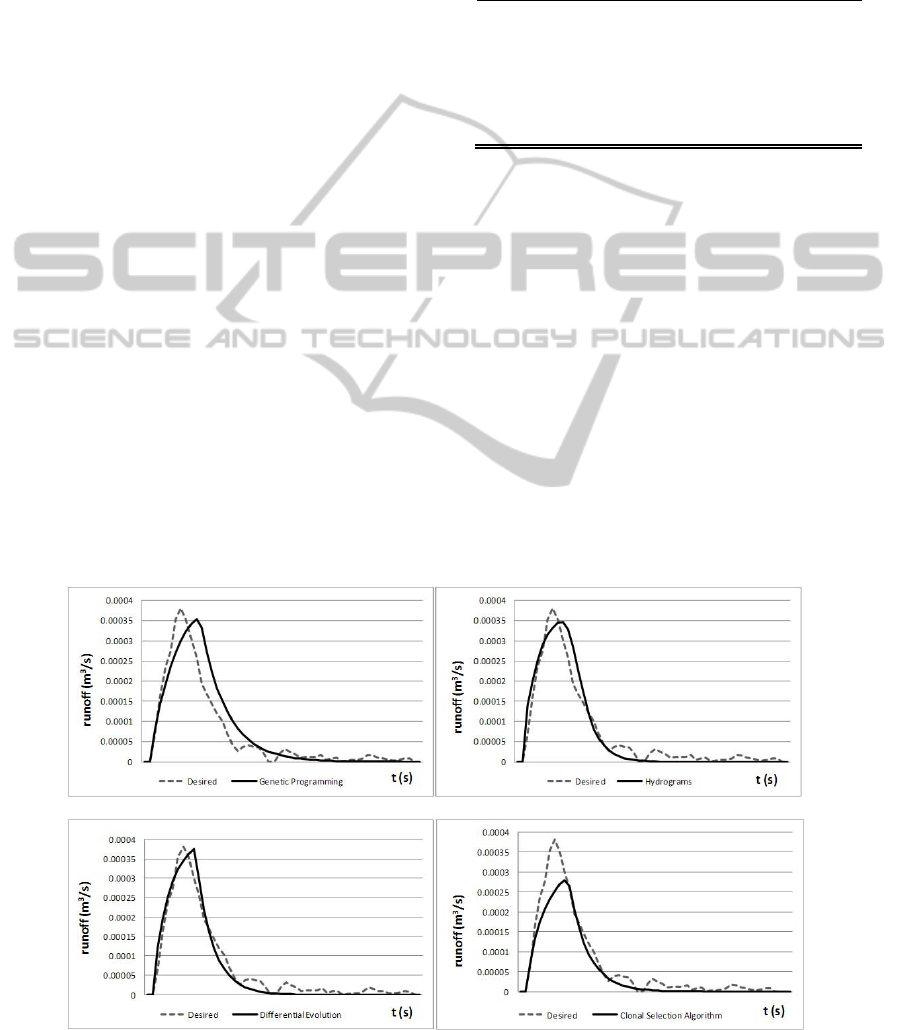
4.3 Discussion
Three different approaches were used in order to
establish a comparison with the method presented in
this paper:
Classical genetic programming (GP): a search
technique proposed by (Koza, 1992). This technique
generates algorithms and expressions represented as
a tree structure. GP has been applied to problems of
rainfall-runoff transformation (Drecourt, 1999), and
it generated complex expressions difficult to
understand.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
m/s
Inputdata
Rainfall
0
0.00005
0.0001
0.00015
0.0002
0.00025
0.0003
0.00035
0.0004
m
3
/s
DesiredOutputData
Run‐off
Figure 3: Input and output of the simulation.
ICEC 2010 - International Conference on Evolutionary Computation
210
Clonal Selection Algorithms (CSAs): these
algorithms are a type of Artificial Immune Systems
(AIS) (Bownlee, 2007). They are based on Burnet’s
clonal selection theory (Burnet, 1959; Burnet, 1976;
Burnet, 1978), which is inspired by Darwin’s theory
of natural selection to explain the diversity and
adaptability of life. This type of algorithm is
primarily focused on mimicking the clonal selection
principle, which is composed of three mechanisms:
clonal selection, clonal expansion and affinity
maturation via somatic hypermutation. The
implementation used was the Optimization
Immunological Algorithm (opt-IA) proposed in
(Cutello et al., 2004), as it has proved to have a good
performance in optimization problems (Cutello et
al., 2005). To the authors’ knowledge, this technique
has not been applied to rainfall-runoff
transformation problems before. This technique
returns a list of coefficients part of a formula, which
can be easily used to predict outputs.
Hydrographs: this technique was explained
before, as a typical approach used for calculating
rainfall prediction.
As it can be seen in Figure 4, the proposed method
fits the desired signal better than the other
approaches. In fact, if the Mean Square Error
obtained by these techniques is compared, the lowest
value is reached with the DE approach proposed in
this work.
The HEC-HMS software (HEC-HMS, 2010) has
been used to calculate the hydrographs’ MSE. This
software calculates the hydrograph produced by a
basin. With the rainfall and basin data as input, it
generates the output hydrograph in a graph or table.
Table 1: MSE obtained.
Method
MSE
Genetic Programming 2.50E-05
Clonal Selection Algorithm 1.89E-05
Hydrographs 1.79E-05
Differential Evolution
1.58E-05
The results corresponding to genetic
programming have been calculated with the
algorithm proposed in (Rabuñal et al., 2007).
The following equation (5) has been obtained by
applying the proposed algorithm to the described
data. Table 1 and Figure 4 show the results.
1.025·
0.463·
0.579·
0.119·
(5)
5 CONCLUSIONS
The main objective of this work has been the
construction of a virtual laboratory for calculating
the rainfall-runoff transformation without building a
physical model.
Figure 4: Rainfall-Runoff transformation predicted with the different techniques.
GENETIC ALGORITHM BASED ON DIFFERENTIAL EVOLUTION WITH VARIABLE LENGTH - Runoff Prediction
on an Artificial Basin
211

This way, an equation will be calculated in order
to predict a run-off value using previous rainfall
values.
Several approaches try to solve this problem in
different ways. In this article, a Differential
Evolution technique is proposed. The main included
feature is the variable length of the individuals in the
genetic population.
The results obtained have been compared with
three different techniques used for predicting the
rainfall-runoff transformation. The presented
approach gets good results.
ACKNOWLEDGEMENTS
This work was supported by the General Directorate
of Research, Development and Innovation
(Dirección Xeral de Investigación,
Desenvolvemento e Innovación) of the Xunta de
Galicia (Ref. 08MDS003CT). The work of Vanessa
Aguiar is supported by a grant from the General
Directorate of Research, Development and
Innovation of the Xunta de Galicia.
REFERENCES
Bownlee, J., 2007. Clonal Selection Algorithms, Complex
Intelligent Systems Laboratory (CIS), Centre for
Information Technology Research (CITR), Faculty of
Information and Communication Technologies (ICT),
Swinburne University of Technology, Melbourne,
Australia, pp. 13.
Burnet, F. M., 1959. The clonal selection theory of
acquired immunity. Vanderbilt University Press,
Nashville, Tenessee.
Burnet, F. M., 1976. A modification of Jerne's theory of
antibody production using the concept of clonal
selection. CA Cancer J Clin 26, 119-21.
Burnet, F. M., Clonal selection and after, in: Bell, G. I., et
al., Eds.), Theoretical Immunology, Marcel Dekker
Inc. 1978, pp. 63-85.
Cea, L., Garrido, M., Puertas, J., 2099. Urban flood
computations from direct precipitation data using a
two-dimensional shallow water model. The 8th
International Conference on Urban Drainage
Modelling. Japón.
Cutello, V., Narzisi, G., Nicosia, G., and Pavone ,M.,
2005. Clonal Selection Algorithms: A Comparative
Case Study Using Effective Mutation Potentials, in:
Jacob, C. and al., e., Eds.), 4th International
Conference on Artificial Immune Systems (ICARIS),
Vol. LNCS 3627. Springer-Verlag, Banff, Alberta,
Canada, pp. 13-28.
Cutello, V., Narzisi, G., Nicosia, G., Pavone, M., and
Sorace, G., 2004. How to Escape Traps using Clonal
Selection Algorithms, 1st International Conference on
Informatics in Control, Automation and Robotics
(ICINCO), Vol. 1. INSTICC Press, Setubal, Portugal,
pp. 322-326.
Dorado, J., Rabuñal, J. R., Pazos, A., Rivero, D. and
Santos, A., 2003. Prediction and modeling of the
rainfall-runoff transformation of a typical urban basin
using ANN and GP. Applied Artificial Intelligence,
vol. 17, pp.329-343.
Drecourt, J. P., 1999. Application of Neural Networks and
Genetic Programming to Rainfall-Runoff Modelling.
D2K Technical Report, vol. 0699-1-1, Danish
Hydraulic Institute, Denmark.
Feoktistov, V., 2006. Differential Evolution. In search of
solutions. Springer.
Hydroworks, 1995. User Manual. Hydraulic Research Ltd:
Wallingford.
HEC-HMS, http://www.hec.usace.army.mil/software/hec-
hms/, Accedida por última vez: Abril 2010.
Koza, J. R., 1992. Genetic Programming. On the
Programming of Computers by means of Natural
Selection. Cambrige, MA: The MIT Press.
Mayer, D. G., Kinghorn, B. P. and Archer, A. A.,
Differential evolution – an easy and efficient
evolutionary algorithm for model optimization,
Agricultural Systems, vol. 83, pp. 315-328, 2004.
Qin, A. K., Huang, V. L. and Suganthan, P. N., 2009.
Differential Evolution Algorithm with strategy
adaptation for global numerical optimization, IEEE
Trans. On Evolutionary Computation, vol. 13, no. 2,
pp. 398-417.
Rabuñal, J. R., Puertas, J., Suárez, J., Rivero, D., 2007.
Determination of the unit hydrograph of a typical
urban basin using genetic programming and artificial
neural networks. Hydrological Processes, vol. 21, pp.
476-485.
Storn, R. and Price, K. V., 1997. Differential evolution-A
simple and efficient heuristic for global optimization
over continuous Spaces, J. Global Optim., vol. 11, pp.
341-359.
Viessmann, W., Lewis, G. L. and Knapp, J. W., 1989.
Introduction to Hydrology. New York: Harper Collins.
ICEC 2010 - International Conference on Evolutionary Computation
212
