
Evolutionary Optimization of Echo State Networks:
Multiple Motor Pattern Learning
Andr´e Frank Krause
1,3
, Volker D¨urr
2,3
, Bettina Bl¨asing
1,3
and Thomas Schack
1,3
1
Faculty of Sport Science, Dept. Neurocognition & Action
University of Bielefeld, D-33615 Bielefeld, Germany
2
F
aculty of Biology, Dept. for Biological Cybernetics
University of Bielefeld, D-33615 Bielefeld, Germany
3
Cognitive Interaction Technology, Center of Excellence
University of Bielefeld, D-33615 Bielefeld, Germany
Abstract. Echo State Networks are a special class of recurrent neural networks,
that are well suited for attractor-based learning of motor patterns. Using structural
multi-objective optimization, the trade-off between network size and accuracy
can be identified. This allows to choose a feasible model capacity for a follow-up
full-weight optimization. Both optimization steps can be combined into a nested,
hierarchical optimization procedure. It is shown to produce small and efficient
networks, that are capable of storing multiple motor patterns in a single net. Es-
pecially the smaller networks can interpolate between learned patterns using bi-
furcation inputs.
1 Introduction
Neural networks are biological plausible models for pattern generation and learning.
A straight-forward way to learn motor patterns is to store them in the dynamics of re-
current neuronal networks. For example, Tani [1] argued that this distributed storage
of multiple patterns in a single network gives good generalisation compared to local,
modular neural network schemes [2]. In [3] it was shown that it is not only possi-
ble to combine already stored motor patterns into new ones, but also to establish an
implicit functional hierarchy by using leaky integrator neurons with different time con-
stants in a single network. This can then generate and learn sequences by use of stored
motor patterns and combine them to form new, complex behaviours. Tani [3] uses back-
propagation through time (BPTT, [4]), that is computationally complex and rather bio-
logically implausible. Echo State Networks (ESNs, [5]) are a special kind of reccurent
neuronal networks that are very easy and fast to train compared to classic, gradient
based training methods. Gradient based learning methods suffer from bifurcations that
are often encountered during dynamic behaviour of a network, rendering gradient in-
formation invalid [6]. Additionally, it was shown mathematically that it is very difficult
to learn long term correlations because of vanishing or exploding gradients [7]. The
general idea behind ESNs is to have a large, fixed, random reservoir of recurrently and
Frank Krause A., D
¨
urr V., Bl
¨
asing B. and Schack T. (2010).
Evolutionary Optimization of Echo State Networks: Multiple Motor Pattern Learning.
In Proceedings of the 6th International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 63-71
Copyright
c
SciTePress
sparsely connected neurons. Only a linear readout layer that taps this reservoir needs to
be trained. The reservoir transforms usually low-dimensional, but temporally correlated
input signals into a rich feature vector of the reservoir’s internal activation dynamics.
Typically, the structural parameters of ESNs, for example the reservoir size and
connectivity, are choosen manually by experience and task demands. This may lead
to suboptimal and unnecessary large reservoir structures for a given problem. Smaller
ESNs may be more robust, show better generalisation, be faster to train and computa-
tionally more efficient. Here, multi-objective optimization is used to automatically find
good network structures and explore the trade-off between network size and network
error.
Section 2 describes the ESN equations and implementation. Section 3 introduces
the optimization of the network structure and explains how small and effective networks
can be identified. Good network structures are further optimized at the weight level in
section 4. Section 4.1 shows how to combine structural and weight level optimization
into a single, nested algorithm, facilitating a genetic archive of good solutions. In sec-
tion 5, the dynamic behaviour of the optimized ESNs is shown for different bifurcation
inputs.
0
0
1
u(t)
y(t)
a
b
sensor readings
W
in
W
out
W
back
W
res
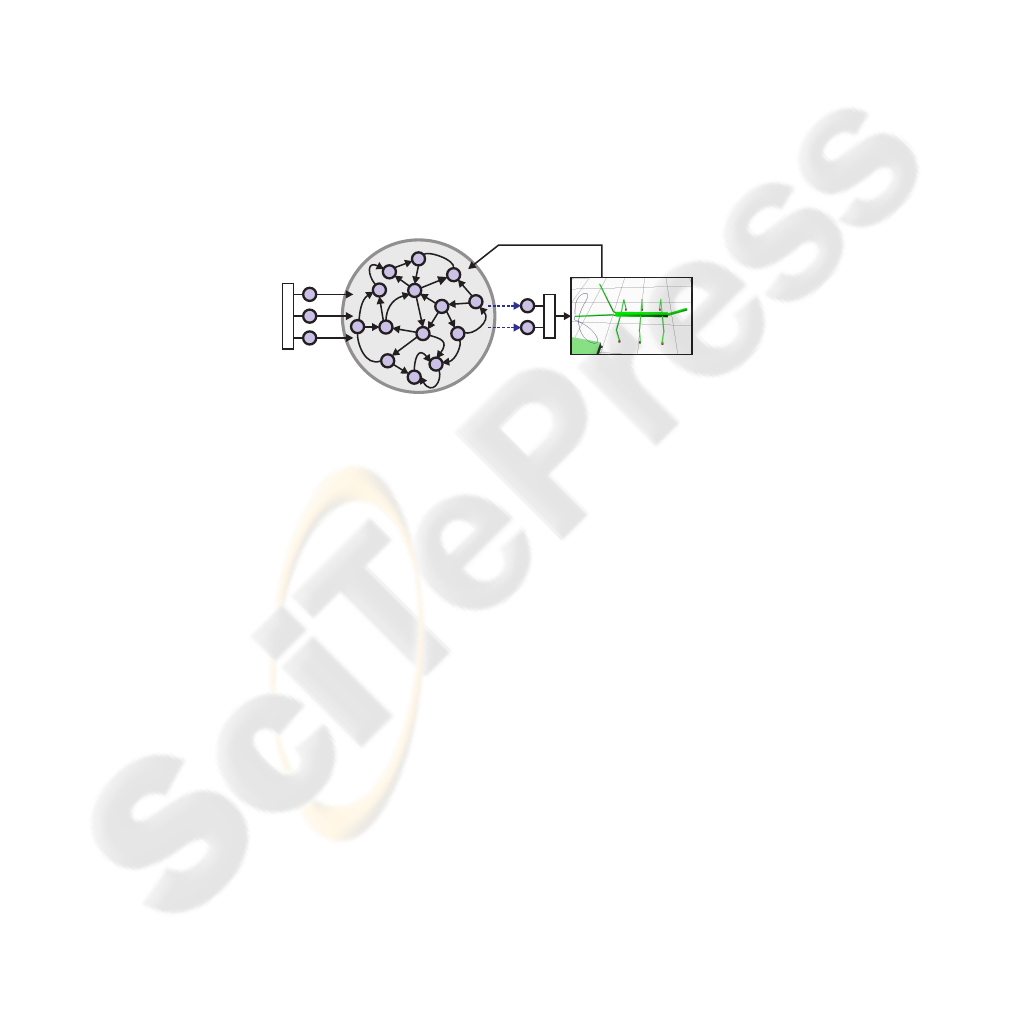
Fig.1. General structure of an echo state network. Solid arrows indicate fixed, random connec-
tions, while dotted arrows are trainable readout connections. The output [????] sets the joint
angles of a bi-articular manipulator, e.g., an bio-inspired active tactile sensor. Joint angles are fed
back via the backprojection weight matrix W
back
.
2 Echo State Network
A basic, discrete-time ESN with a sigmoid activation functions was implemented in
Matlab
c
2009b. The purpose of this ESN was to control the joints of a bi-articular
manipulator that could serve as a bio-inspired, active tactile sensor. The overall goal
was to use the input to the ESN to set the tactile sampling pattern as desired. The state
update equations used are:
y(n) = W
out
x(n)
x(n + 1) = tanh(W
res
x(n) + W
in
u(n + 1) + W
back
y(n) + ν(n))
(1)
where u, x and y are the activations of the input, reservoir and output neurons, respec-
tively. ν(n) adds a small amount of uniformly distributed noise to the activation values
of the reservoir neurons. This tends to stabilize solutions, especially in models that use
output feedback for cyclic attractor learning [8]. W
in
, W
res
, W
out
and W
back
are

the input, reservoir, output and backprojection weight matrices. All matrices are sparse,
randomly initialised, and stay fixed, except for W
out
. The weights of this linear output
layer are learned using offline batch training. During training, the teacher data is forced
into the network via the back-projection weights (teacher forcing), and internal reser-
voir activations are collected (state harvesting). After collecting internal states for all
training data, the output weights are directly calculated using ridge regression. Ridge
regression uses the Wiener-Hopf solution W
out
= R
−1
P and adds a regularization
term (Tikhonov regularization):
W
out
= (R + α
2
I)
−1
P (2)
where α is a small number, I is the identity matrix, R = S
′
S is the correlation
matrix of the reservoir states and P = S
′
D is the cross-correlation matrix of the states
and the desired outputs. Ridge regression leads to more stable solutions and smaller
output weights, compared to ESN training using the Moore-Penrose pseudoinverse. A
value of α = 0.08 was used for all simulations in this paper.
3 Multi-objective Network Structure Optimization
Multi-objective optimization (MO) is a tool to explore trade-offs between conflicting
objectives. In the case of ESN optimization, the size of the reservoir versus the net-
work performance is the main trade-off. In MO, the concept of dominance replaces the
concept of a single optimal solution in traditional optimization. A solution dominates
another, if strictly one objective value is superior and all other objectives are at least
equal to the corresponding objective values of another solution. Following this defini-
tion, multiple (possibly infinite) non-dominated solutions can exist, instead of a single
optimal solution. The set of non-dominated or pareto-optimal solutions is called the
pareto front of the multi-objective problem. The goal of MO is to find a good approx-
imation of the true pareto front, but usually MO algorithms converge to a local pareto
front due to complexity of the problem and computational constraints.
Usually, the structural parameters of an ESN are choosen manually by experience
and task demands. Here, the full set of free network parameters was optimized using
MO. The MO was performed with the function ’gamultiobj’ from the Matlab Genetic
Algorithm and Direct Search (GADS) Toolbox, that implements a variant of the ’Eli-
tist Non-dominated Sorting Genetic Algorithm version II’ (NSGA-II algorithm, [9]).
The network structure was encoded into the genotype as a seven-dimensional vector of
floating point numbers. The first six structural parameters were the sparsity and weight
range of the input-, reservoir- and backprojection weights. The seventh parameter was
the number of reservoir neurons. The search range of the algorithm was constrained
to [0, 1] for the sparsity values, to [−5, 5] for the weight values and to [1, 100] for the
reservoir size ([1, 500] for the 4-pattern problem). The optimization was started with a
population size of 1000 and converged after around 120 generations. In each iteration of
the MO, all genomes were decoded into network structures, the networks were trained
and then simulated with random initial activations for 1000 frames per pattern. In order
to neglect the initial transient behaviour, the first 50 iterations of network output were
rejected. The network output and the training patterns are usually not in-phase. The
best match between training pattern and network output was searched by phase-shifting
both output time courses by ± 50 frames relative to the training pattern and calculat-
ing the mean Manhattan distance across all pairs of data points. The training error was
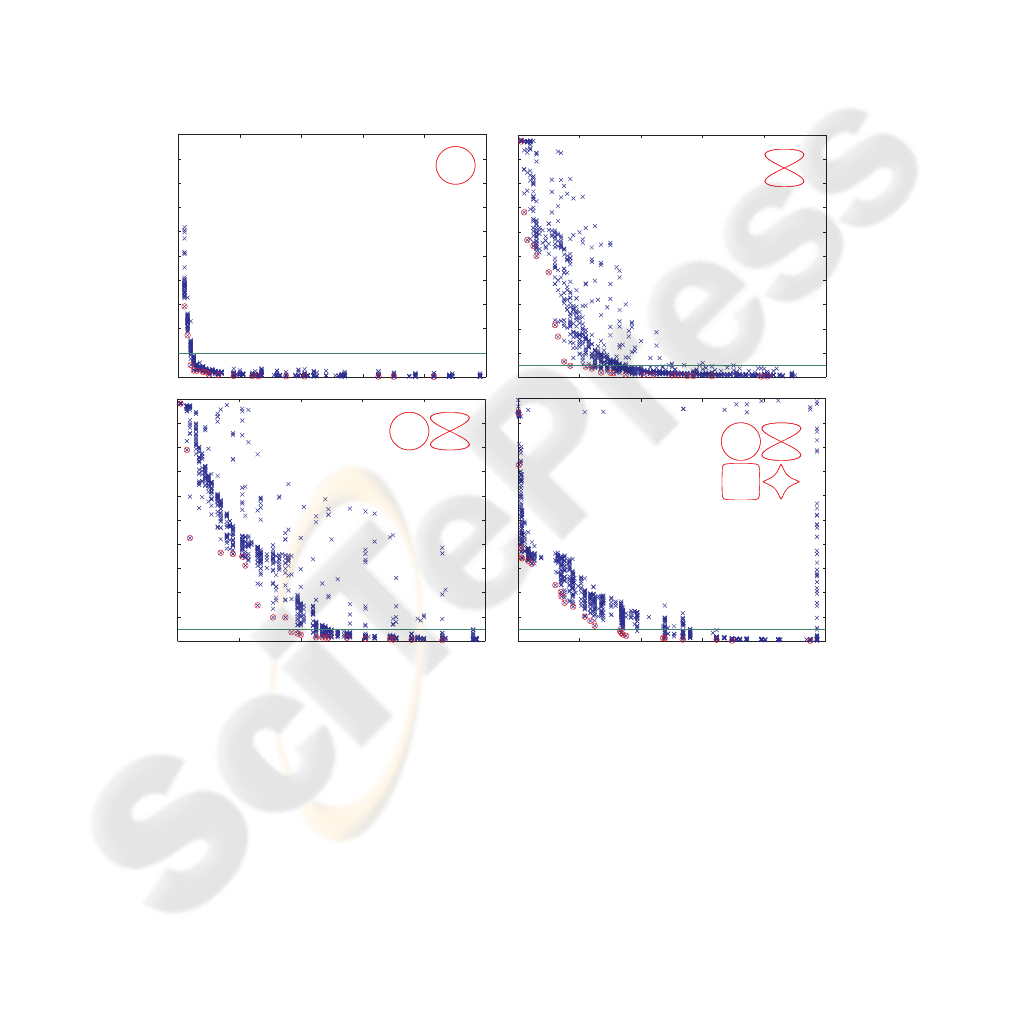
then defined as the smallest distance found in that range. The acceptable error threshold
(fig.2) is expressed as the percentage of the amplitude of the training patterns, that is
1.0 units for all patterns. The pareto front for a circular pattern (Fig.2a) reveals that
even very small networks are capable of learning and generating two sine waves with
identical frequency and 90 phase shift. The smallest network found had only 3 reservoir
neurons. Including the two output neurons, the overall network size was 5. In compar-
ison, 7 neurons are required for this task when using gradient-based learning methods
[10]. Network size increases with the complexity of the motor pattern, and especially
when having to store multiple patterns in a single network. Storing 4 patterns in a single
network required 166 reservoir neurons to reach an error below 5% (Fig.2d).
0 100 200 300 400 500
network size
0 20 40 60 80 100
0
network size
5%
circle
eight
0 20 40 60 80 100
5%
eight
0 20 40 60 80 100
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
error
1%
circle
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
5%
circle
eight
rectangle
star
error
a bb
d
c
Fig.2. Minimum reservoir size depends on task complexity. All panels show a set of pareto-
optimal solutions (red circles) and the final population (blue crosses). (a) Learning a simple,
circular pattern. All networks with 3 or more neurons show an error below 1%. (b) Pareto-front
for the figure eight pattern. Learning this pattern requires a notably larger reservoir. Please note
the different scaling of the error compared to the easier circle task. Networks with 17 or more
neurons have an error below 5%. (c) Storing two motor patterns (circle and figure-eight) as cycli-
cal attractors in a single networkrequires 37 or more reservoir neurons for errors below 5%. (d)
Simultaneous learning of four patterns required 166 neurons.

4 Full Optimization of the Network Weights
From the pareto front of the two-pattern task, four candidate network structures were
selected and optimized further, using a single-objective genetic algorithm. This time,
all network weights except the output layer were fully optimized. The output layer was
still trained by ridge regression. An initial random population of 200 parents was cre-
ated from the network structure information of the selected candidate solutions with 4,
14, 26 and 37 reservoir neurons. Network weights were constrained to [−5, 5] and de-
coded from the genome with a threshold function that preserves sparsity. The threshold
function sets a weight to zero, if the genome value is between -1 and 1, see fig.3.
1
5
-1-5
5
-5
weight value
genome value
Fig.3. Threshold function that decodes genome values into weight values, preserving sparse
weight coding.
The Genetic Algorithm (GA) options were set to ranked roulette wheel selection,
20 elitist solutions, 80% crossover probability with scattered crossover and self adap-
tive mutation. Other options were left at their default values (see GADS toolbox, Mat-
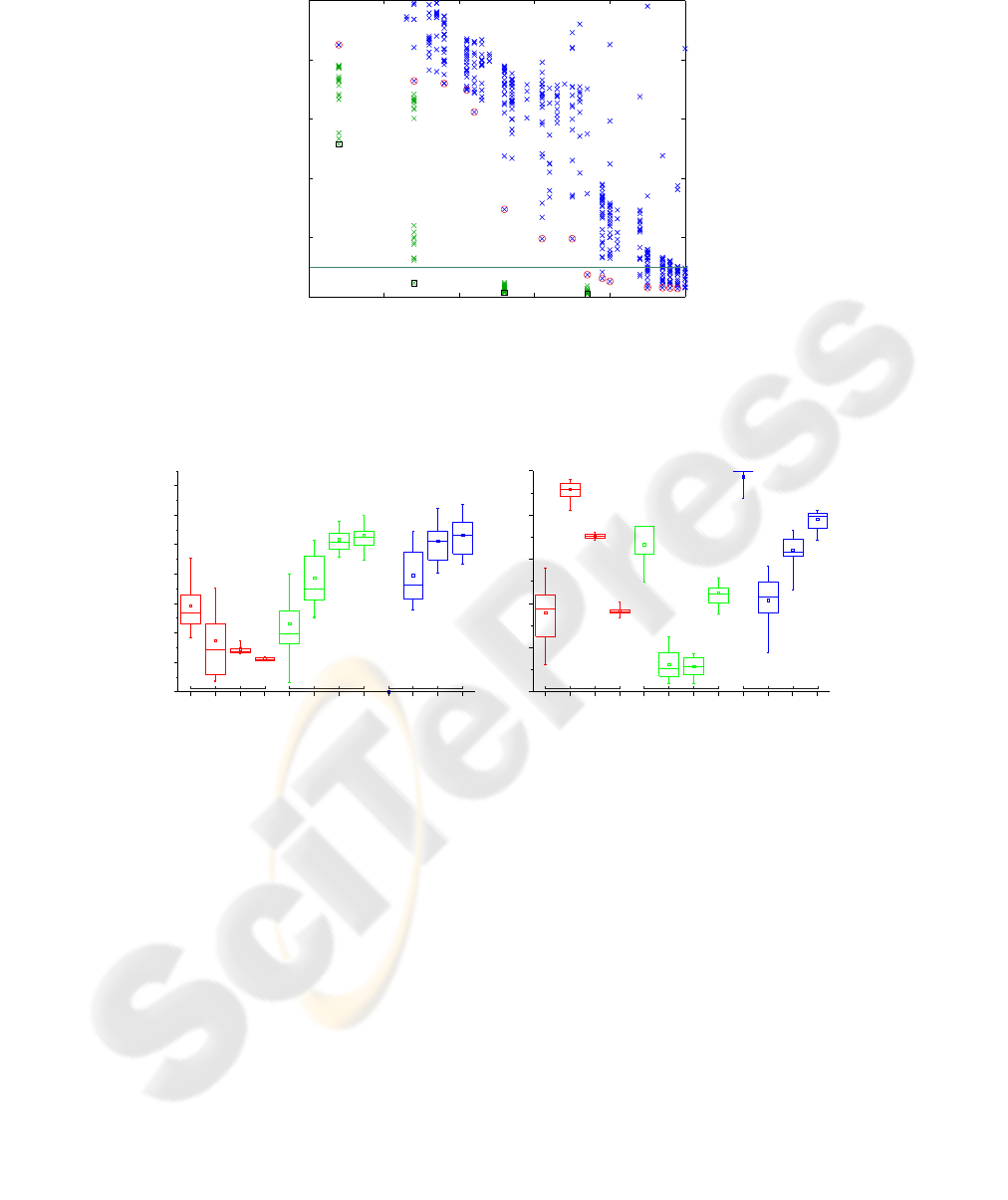
lab2009b). The GA-optimization was repeated 20 times for each network size. Fig.
4a shows the improvement in performance compared to the MO structure optimiza-
tion run. A small network with only 14 reservoir neurons could reproduce the learned
patterns with an error of 2.3%. Weight range and connectivity after optimization was
analysed with an unpaired Wilcoxon rank sum test. Significant differences in connec-
tivity and weight range were found (Fig. 4b) with a clear trend for smaller reservoir
weights and less reservoir connectivity with increasing network sizes. Both input- and
backprojection weights tend to increase with reservoir size (Fig. 4a). Although standard
ESNs usually have full connectivity for input- and backprojectionweights, evolutionary
optimization seems to favor sparse connectivity for smaller networks, when given the
choice (Fig. 4b).
4.1 Hierarchical Evolutionary Optimization
In the previous section, individual solutions of the MO structural evolution were se-
lected and optimized further on the weight level, using a GA. Both steps can be com-
bined by performing a full-weight GA optimization for each iteration of the MO. This
20 30 40 50
network size
10
5%
0
0
0.05
0.1
0.15
0.2
0.25
error
a
Fig.4. Subsequent full-weight matrix optimization improves performance. Additional optimiza-
tion of the four best networks of the two-pattern task with a reservoir size of 4, 14, 26 and 37
neurons. Starting from the best multi-objective solution, 20 GA runs were performed. a) Green
crosses indicate the best fitness values of each run. Black squares indicate the overall best solu-
tions that were found.
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
4 14
26
37
4 14
26
37
4 14
26
37
0,0
0,2
0,4
0,6
0,8
1,0
connectivity
weight range
network size
* **
** ** **
** **** ** ** ** ** **
a
4 14
26
37
4 14
26
37
4 14
26
37
network size
b
Fig.5. Optimal weight range and connectivity depends on reservoir size. Network structure after
full-weight optimization of the selected networks from fig.4. a) Weight range of all non-zero
weights of the reservoir (red), the backprojection weights (green) and the input weights (blue).
b) Connectivity (percentage of non-zero weights). Boxplots show 5%, 25%, 50%, 75% and 95%
quantiles of N=20 datapoints. * p ¡ 0.05; ** p ¡ 0.01.
way, the pareto front improves by moving closer towards the origin of both optimiza-
tion objectives. This nested, hierarchical optimization is computationally demanding.
To speed up the convergenceof the MO, good solutions of the full-weight GA are stored
in an archive, keeping each iteration of the MO accessible. In subsequent iterations, the
archived genome having the closest structure is injected into the new population of the
full-weight GA. Good networks can emerge faster by facilitating cross-over with the
archived solutions. This way, the full-weight optimization does not need to start from
scratch in each iteration. See Fig.6 for hierarchical optimization of the two-pattern task.
The MO had a population size of 200, running - at each iteration - a full-weight opti-
0 10 20 30 40 50
0
0.05
0.1
0.15
0.2
0.25
network size
error
0 10 20 30 40 50
0
0.05
0.1
0.15
0.2
0.25
network size
error
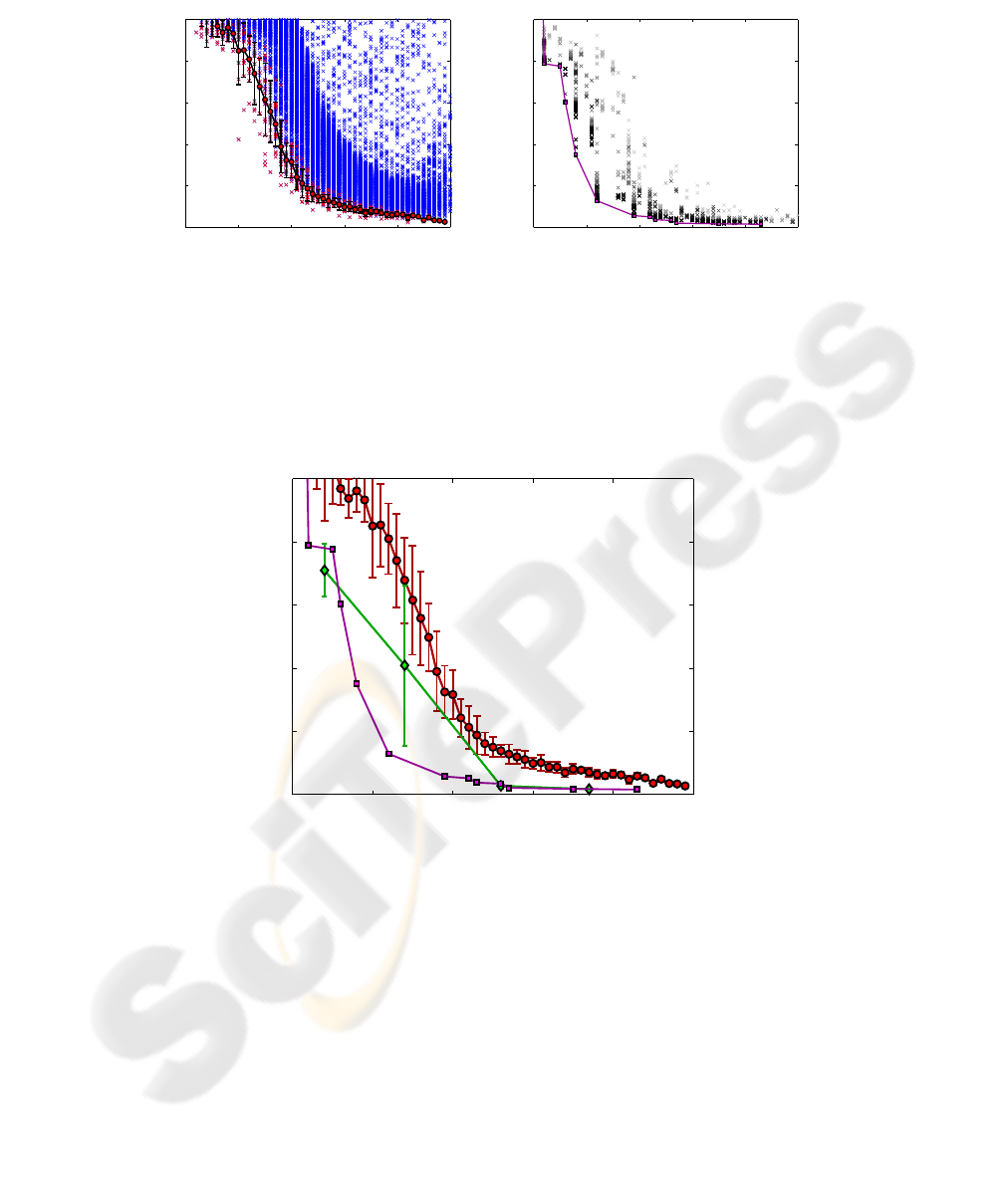
Fig.6. Left graph: Average pareto front from N=30 repetitions of the strucural MO. Blue crosses
show the final populations, red crosses show the pareto fronts, and the red circles show the mean
and standard deviation of the pareto-optimal solutions for each network size. Right graph: Hier-
archically nesting a full-weight GA optimization into the MO optimization gives a more accurate
approximation of the true pareto front, as compared to structural MO alone. The plot shows a sin-
gle run of the nested MO-GA optimization over 25 generations. Crosses show the population at
each generation in grey levels ranging from light grey (first generation) to black (last generation).
A single run outperforms the best solutions found in 30 runs of the structural MO, see Fig.7.
0 10 20 30 40 50
0
0.05
0.1
0.15
0.2
0.25
network size
error
0 10 20 30 40 50
0
0.05
0.1
0.15
0.2
0.25
network size
error
Fig.7. Comparison of the different optimization runs. The structural MO is shown in red (cir-
cles), full-weight optimization of selected solutions from the structural MO in green (diamonds),
and the hierarchical optimization in magenta (squares). A single run of the nested, hierarchical
optimization shows almost the same performance as the full-weight optimization from section 4.
mization with a population size of 20 individuals for 50 generations. Fig. 7 compares
the pareto fronts of the different optimization strategies. A single run of the nested op-
timization algorithm achieves almost the same result as the combination of structural
and subsequent full-weight optimization.
5 Dynamic Network Behaviour
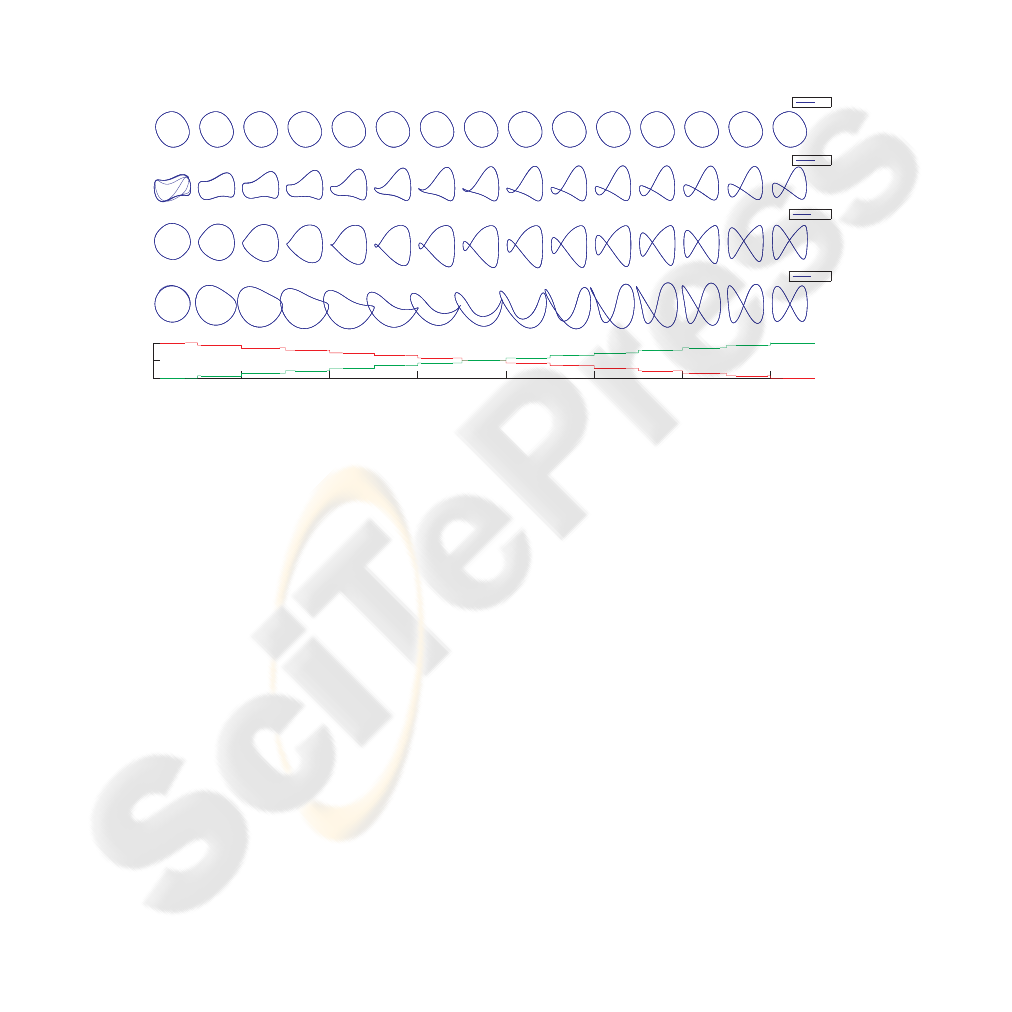
Most of the smaller networks show an unexpected behaviour. They are able to interpo-
late between the learned patterns, generating novel, not explicitly trained outputs. Fig.
8 shows the dynamical responses from the fittest networks of section 4.1. The first in-
put value was changed gradually in 15 steps from 1.0 to 0.0, while the second input
was changed from 0.0 to 1.0. A gradual morphing from the circular to the figure-eight
pattern can be observed. It is surprising, that already a small ESN with six reservoir neu-
rons can store two different patterns. Larger networks tend to converge to fixed points
for input values other than the trained ones. This interpolation effect might be applied
to complex and smooth behaviour generation for neural network controlled robots.
N=2
N=6
N=12
N=33
0 2 4 6 8 10 12 14
0
0.5
1
Fig.8. Dynamic behaviour of selected networks with different reservoir sizes (blue trajectories).
Shifting the dynamics of the networks by gradually changing the first input value (red) from 1.0
to 0.0 and the second input (green) from 0.0 to 1.0 in 15 steps. Changing the input to the network
causes a slow morphing between the two learned patterns, allowing to generate new patterns that
were not explicitly trained. Especially the small networks keep stable with no chaotic regions.
Larger networks tend to converge to fixed points for input values other than zero or one.
6 Conclusions
Using MO, good candidate network structures can be selected as starting points for a
followup whole-network optimization and fine-tuning using genetic algorithms. Both
steps can be combined into a nested, hierarchical multi-objective optimization. The re-
sulting pareto front helps to identify small and sufficiently efficient networks that are
able to store multiple motor patterns in a single network. This distributed storage of
motor behaviours as attractor states in a single net is in contrast to earlier, local module
based approaches. ”If sequences contain similarities and overlap, however, a conflict
arises in such earlier models between generalization and segmentation, induced by
this separated modular structure.” [3]. By choosing a feasible model capacity, over-
fitting and the risk of unwanted - possibly chaotic - attractor states is reduced. Also,
with the right choice of the network size, an interesting pattern interpolation effect can

be evoked. Instead of using a classic genetic algorithm for fine-tuning of the network
weights, new, very fast and powerful black box optimisation algorithms [11] [12] could
further increase network performance and allow to find even smaller networks for bet-
ter generalisation. ESNs can be used for direct control tasks ( see [13]) and scale well
with a high number of training patterns and motor outputs [14]. A more complex simu-
lation, for example of a humanoid robot, will show if direct, attractor-based storage of
parameterized motor patterns is flexible enough for complex behaviour generation.
References
1. Tani, J., Itob, M., Sugitaa, Y.: Self-organization of distributedly represented multiple behav-
ior schemata in a mirror system: reviews of robot experiments using rnnpb. Neural Networks
17 (2004) 1273 – 1289
2. Haruno, M., Wolpert, D. M., Kawato, M.: Mosaic model for sensorimotor learning and
control. Neural Computation 13(10) (2001) 2201–2220
3. Yamashita, Y., Tani, J.: Emergence of functional hierarchy in a multiple timescale neural
network model: A humanoid robot experiment. PLoS Computational Biology 4 (11) (2008)
4. Werbos, P.: Backpropagation through time: what it does and how to do it. In: Proceedings
of the IEEE. Volume 78(10). (1990) 1550–1560
5. J¨ager, H., Haas, H.: Harnessing nonlinearity: Predicting chaotic systems and saving energy
in wireless communication. Science 304 (2004) 78 – 80
6. Jaeger, H.: Tutorial on training recurrent neural networks, covering bppt, rtrl, ekf and the
”‘echo state network”‘ approach. Technical Report GMD Report 159, German National
Research Center for Information Technology (2002)
7. Hochreiter, S., Bengio, Y., Frasconi, P., Schmidhuber, J.: Gradient flow in recurrent nets: the
difficulty of learning long-term dependencies. In S. C. Kremer, J. F. K., ed.: A Field Guide
to Dynamical Recurrent Neural Networks. IEEE Press (2001)
8. Jaeger, H., Lukosevicius, M., Popovici, D., Siewert, U.: Optimization and applications of
echo state networks with leaky integrator neurons. Neural Networks 20(3) (2007) 335–352
9. Deb, K., Pratap, A., Agarwal, S., Meyarivan, T.: A fast and elitist multiobjective genetic
algorithm: Nsga-ii. IEEE Transactions on Evolutionary Computation 6, No. 2 (2002) 182–
197
10. Pearlmutter, B. A.: Learning state space trajectories in recurrent neural networks. Neural
Computation 1 (1989) 263–269
11. Kramer, O.: Fast blackbox optimization: Iterated local search and the strategy of powell. In:
The 2009 International Conference on Genetic and Evolutionary Methods (GEM’09). (2009)
in press.
12. Vrugt, J. A., Robinson, B. A., Hyman, J. M.: Self-adaptive multimethod search for global
optimization in real-parameter spaces. Evolutionary Computation, IEEE Transactions on
13(2) (2008) 243–259
13. Krause, A. F., Bl¨asing, B., D¨urr, V., Schack, T.: Direct Control of an Active Tactile Sen-
sor Using Echo State Networks. In: Human Centered Robot Systems. Cognition, Interac-
tion, Technology. Volume 6 of Cognitive Systems Monographs. Berlin Heidelberg: Springer-
Verlag (2009) 11–21
14. J¨ager, H.: Generating exponentially many periodic attractors with linearly growing echo
state networks. technical report 3, IUB (2006)
