
EVALUATING PREDICTION STRATEGIES IN AN ENHANCED
META-LEARNING FRAMEWORK
Silviu Cacoveanu, Camelia Vidrighin and Rodica Potolea
Technical University of Cluj-Napoca, Cluj-Napoca, Romania
Keywords: Meta-learning Framework, Data Set Features, Performance Metrics, Prediction Strategies.
Abstract: Finding the best learning strategy for a new domain/problem can prove to be an expensive and time-
consuming process even for the experienced analysts. This paper presents several enhancements to a meta-
learning framework we have previously designed and implemented. Its main goal is to automatically
identify the most reliable learning schemes for a particular problem, based on the knowledge acquired about
existing data sets, while minimizing the work done by the user but still offering flexibility. The main
enhancements proposed here refer to the addition of several classifier performance metrics, including two
original metrics, for widening the evaluation criteria, the addition of several new benchmark data sets for
improving the outcome of the neighbor estimation step, and the integration of complex prediction strategies.
Systematic evaluations have been performed to validate the new context of the framework. The analysis of
the results revealed new research perspectives in the meta-learning area.
1 INTRODUCTION
Ever since the beginning of the information age,
companies, organizations, universities all around the
world have been taking advantage of technological
advances to store large amounts of data. The
increase of virtual space made available by new and
cheaper storage devices has encouraged people to
keep records specific to all activities taking place in
their institutions. Advances in database systems have
made searching and organizing the stored data easier
for experts – but the technology for automatically
obtaining valuable information from this data has
only recently started to gain popularity. Data mining
approaches employ methods from different fields,
such as statistics, artificial intelligence, meta-
learning, to induce models from large amounts of
data. These models enable the characterization of
data by summarizing the class under study in general
terms, discovering frequently occurring
subsequences (in transactional datasets), classifying
new data, predicting numeric values, grouping
similar items in a database, analyzing outliers for
fraud detection and analyzing the trends of objects
whose behavior changes over time.
An important step in the data mining process is
selecting the right learning algorithm for the
analyzed data. This initial assessment is time
consuming since one has to decide which of the
learning strategies is most suited given the context.
No definite way of discovering the best learning
algorithm for a new problem has been devised yet,
but many proposals for selecting a good technique
exist in the literature. Selecting a suitable learning
algorithm for a new data set is a complex task even
for an experienced data analyst. Moreover, some
hidden knowledge could be present in data. Such
knowledge can sometimes be surmised by the
domain experts, yet not so often by the data analyst.
Therefore, an initial assessment should always be
performed, in order to identify the most promising
knowledge extraction methodology for the given
problem. The process usually involves training
several models with different learning algorithms
whose parameters settings vary and evaluating their
performance (perhaps under several metrics) with
respect to the requirements of the problem. The
analyst can then choose the learning algorithm and
the settings which register the best performance. The
time required to build a model increases with the
complexity of the model and with the size of the
input data. Running and evaluating all known
learning algorithms is therefore unfeasible.
A more suitable approach involves comparing
the new problem with a set of problems for which
the learning algorithm performance is already
148
Cacoveanu S., Lemnaru C. and Potolea R. (2010).
EVALUATING PREDICTION STRATEGIES IN AN ENHANCED META-LEARNING FRAMEWORK.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
148-156
DOI: 10.5220/0002975401480156
Copyright
c
SciTePress

known (Aha,1992) (Bensusan,2000) (Giraud-
Carrier,2000) (Vilalta,2004). The analyst must
identify the problem which resembles the analyzed
data the most. Consequently, the same learning
algorithm and settings that obtained the best results
on the former problem is expected to achieve similar
performance on the new problem. To make use of
this approach, the expert must have access to a large
set of problems that have already been evaluated
with various techniques. Also, the success of the
selected learning algorithm on the new problem
depends on the expert’s strategy for selecting similar
problems.
Creating a framework which brings together all
the tools necessary to analyze new problems and
make predictions related to the learning algorithms’
performance would automate the analyst’s work.
This will result in a significant speed-up and an
increased reliability of the learning algorithm
selection process. Such a framework would prove to
be valuable for an experienced data analyst and
could also help new users discover a good classifier,
regardless of their knowledge of the data mining
domain and the problem context (for users that do
not know if maximizing the accuracy or minimizing
the false-positive rate is preferable in the given
problem context). We have already proposed such a
tool in (Cacoveanu, 2009) and developed an
implementation based on classifiers provided by the
Weka framework (Witten,2005). Our initial focus
was on selecting a wide range of dataset features and
improving the classifier prediction time. We also
wanted to facilitate the addition of new datasets such
that our system continuously improves its
performance.
This paper presents several enhancements to a
meta-learning framework we have previously
designed and implemented. Its main goal is to
automatically identify the most reliable learning
schemes for a particular problem, based on the
knowledge acquired about existing data sets, while
minimizing the work done by the user but still
offering flexibility.
The rest of the paper is organized as follows: In
section 2 we present the meta-learning frameworks
presented in literature. Section 3 presents a formal
model of our tool, the characteristics we use to
describe datasets and the metrics implemented in the
system. Section 4 describes the prediction strategies
we tested with our tool and the results. We conclude
the paper by restating the improvements added to
our framework and proposals for future
development.
2 RELATED WORK
Aha (Aha,1992) proposes a system that constructs
rules which describe how the performance of
classification algorithms is determined by the
characteristics of the dataset.
Rendell et al. describe in (Rendel,1987) a system
called VBMS. Their system tries to predict which
algorithms will perform better for a given
classification problem using the problem
characteristics (number of examples and number of
attributes). The main disadvantage of VBMS is that
it is trained as new classification tasks are presented
to it, which makes it slow.
The approach applied in the Consultant expert
system (Sleemann et al (Sleeman,1995)) relies
heavily on a close interaction with the user.
Consultant poses questions to the user and tries to
determine the nature of their problem from the
answers. It does not examine the user’s data.
Schaffer (Schaffner,1993) proposes a brute force
method for selecting the appropriate learner: execute
all available learners for the problem at hand and
estimate their accuracy using cross validation. His
system selects the learner that achieves the highest
score. This method has a high demand of
computational resources.
STATLOG (Michie,1994) extracts several
characteristics from datasets and uses them together
with the performance of inducers (estimated as the
predictive accuracy) on the datasets to create a meta-
learning problem. It then employs machine learning
techniques to derive rules that map dataset
characteristics to inducer performance. The
limitations of the system include the fact that it
considers a limited number of datasets; it
incorporates a limited set of data characteristics and
uses accuracy as the sole performance measure.
P. B. Brazdil et al. propose in (Brazdil,2003) an
instance-based learner for obtaining an extensible
system which ranks learning algorithms based on a
combination of accuracy and time.
3 A FRAMEWORK FOR
SEARCHING FOR SUITABLE
LEARNERS
This section starts by presenting a formal model for
a classifier prediction framework. The framework is
built over a database containing stored problems
already analyzed and classifiers used in the analysis
EVALUATING PREDICTION STRATEGIES IN AN ENHANCED META-LEARNING FRAMEWORK
149
process. The IO part of the framework consists of
the problem and requirements provided by the user
and the result, a selection of suitable classifiers,
returned by the framework. The second part of the
section describes the features we used to describe
data mining problems. The last part of this section
presents the metrics we use to evaluate the
performance of a classification model.
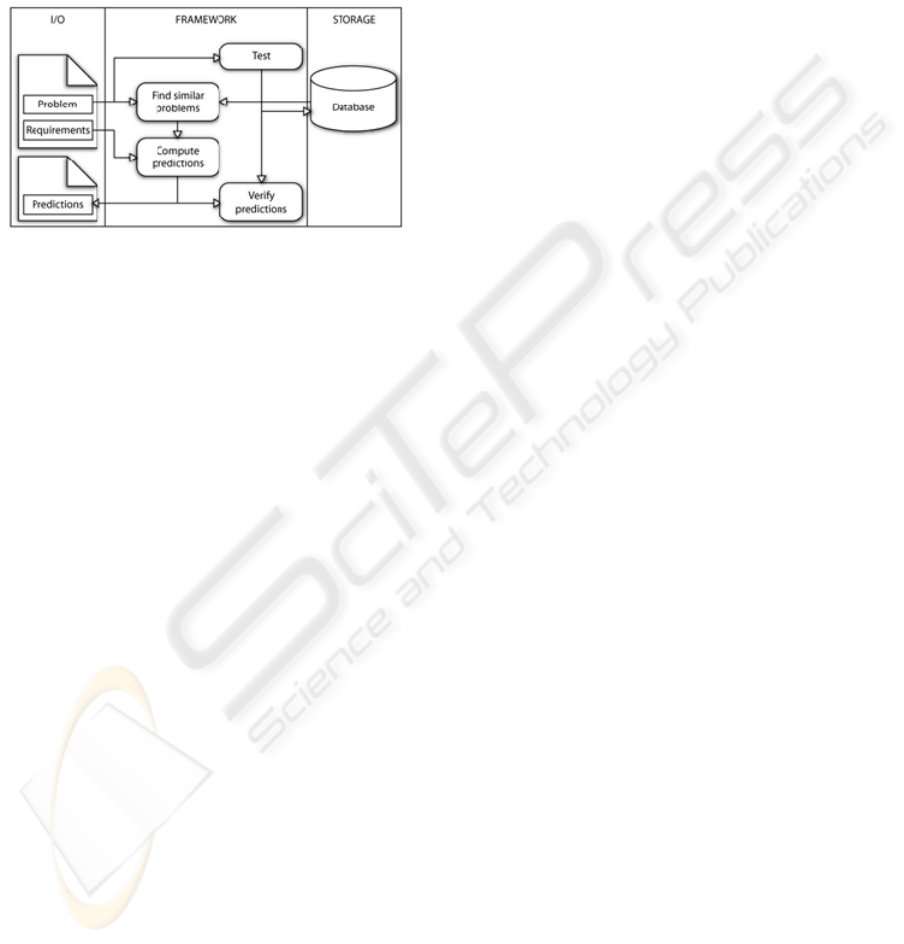
Figure 1: System diagram.
3.1 A formal Model of our Tool
In this section we present a formal model for an
automated learner selection framework (Figure 1).
The basic functionality of a learner selection system
is to evaluate, rank and suggest an accurate learning
algorithm for a new problem submitted to the
system, together with the user’s requirements. The
suggested algorithm can then be used on the
problem to induce a model which achieves the best
performance while meeting the user’s requirements.
The user involvement is limited to providing the
input problem (i.e. a data set which the user needs to
classify) and specifying the requirements. The result
is presented to the user as an ordering of learning
algorithms, arranged in decreasing performance
order. Recommending more than a single learning
algorithm is important as it allows the user to decide
on the specific strategy they want to follow (they
might prefer a faster but least accurate algorithm to a
very accurate one, or an algorithm they are
accustomed to). The system should also minimize
the time it takes to provide the results.
The process of obtaining the predictions is
roughly divided into selecting the similar problems
and obtaining predictions from similar problems. In
order to be able to provide accurate predictions for
new datasets the system relies on a database
containing the problems and the solutions (classifier
+ performance) obtained on those problems. The
system must have the ability to increase its
knowledge by adding new problems and the
corresponding solutions. To do this, the first
important functionality of the system is the ability to
run learning algorithms and evaluate those
algorithms. This occurs mainly in the initialization
phase of the system.
After a significant collection of problems has
been stored in the database, the system is ready for
the prediction phase. In this phase, a new problem is
submitted to the system, along with its requirements.
The system must now find similar problems in its
database. This is done by computing the distance
between the analyzed problem and the stored
problems. Once the distances have been evaluated, a
subset of the nearest stored problems is selected as
neighbors of the analyzed problem.
The results obtained by the learning algorithms
for every neighbor problem are already present in
the database. The performance score of each
classifier is obtained by evaluating the results
obtained by that classifier from the perspective of
the user requirements. The framework then predicts
the performance score for the classifier on the
analyzed problem as a combination of the
performance scores obtained by that classifier on the
neighboring problems. The final list of
recommended learning algorithms is ordered by
their predicted performance scores.
After a new prediction is performed, during the
time the system is idle (it does not have to perform
another prediction), it continues with an extension of
the initialization phase. More specifically, it trains
and evaluates models on each new problem added to
the system and saves the new data to the database.
This way, the system’s knowledge increases and its
prediction capabilities improve.
3.2 Problem
Characterization – Meta-features
In order to estimate the similarity (i.e compute the
distance) between problems (i.e. data sets), a series
of meta-features are extracted from the data sets.
The meta-features we employ in this framework can
be divided into four categories. One of these
categories is focused on the type of the attributes in
the data sets. It contains the total number of
attributes of a data set (Michie,1994), the number of
nominal attributes (Kalousis,2002), the number of
boolean attributes (Kalousis,2002) (Michie,1994)
and the number of continuous (numeric) attributes
(Kalousis,2002). Another category is focused on
analyzing the properties of the nominal and binary
attributes of the data sets. This category contains the
maximum number of distinct values for nominal
attributes (Kalousis,2002) (Linder,1999), the
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
150
minimum number of distinct values for nominal
attributes (Kalousis,2002) (Linder,1999), the mean
of distinct values for nominal attributes
(Kalousis,2002) (Linder,1999), the standard
deviation of distinct values for nominal attributes
(Kalousis,2002) (Linder,1999) and the mean entropy
of discrete variables (1) (Kalousis,2002).
(1)
Similar to the previous category, the next category
focuses on the properties of the continuous attributes
the data sets have. It includes the mean skewness of
continuous variables (2) (Kalousis,2002)
(Michie,1994), which measures the asymmetry of
the probability distribution, and the mean kurtosis of
continuous variables (3) (Kalousis,2002)
(Michie,1994) representing the peak of the
probability distribution.
1
∑
1
∑
(2)
1
∑
1
∑
(3)
A final category gives a characterization of the
dimensionality of the data set. It contains the overall
size, represented by the number of instances, and
imbalance rate information (relative size)
(Japkowicz,2002). The mean (5) and maximum (4)
imbalance rates of the classes in the dataset are
computed (in case there are only 2 classes, the mean
and maximum imbalance rates are equal).
max
|1,
,
,
,
I = number of instances,
=number of instances
belonging to class i, c=number of classes
(4)
(5)
3.3 Classifier Performance Metrics
The performance score of a classifier depends on the
problem requirements provided by the user. When
designing the system, we have focused on
minimizing its dependence of user input. We still
need to provide the user with a method of guiding
the search for a suitable learning algorithm. For this
purpose, we employ nine metrics, divided into three
categories, as proposed in (Caruana,2004). The
metrics in Table 1, along with a general purpose
metric are described in this section.
T
able 1: Performance metrics.
Threshold Rank Probability
Accuracy,
Recall, False
Positive Rate,
True Negative
Rate, False
Negative Rate
Area Under
ROC, Precision
Geometric Mean,
Generalized
Geometric Mean
Most classifier performance metrics are generated
from the confusion matrix produced by the induced
model on a test sample. The confusion matrix is the
most general indicator of the way a model identifies
the right label of instances. An example of a
confusion matrix for c classes is provided in Figure
2. The entry from the i
th
row j
th
column represents
the number of instances from class i that were
labeled by the model as belonging to class j.
,
,
,
,
Figure 2: Confusion matrix for dataset with c classes.
While most users will be concerned with the
accuracy of the generated models, in some cases
they might prefer to focus on improving a different
performance criterion (for instance to maximize the
sensitivity or specificity). This difference usually
comes from the different costs associated to specific
errors. As an example, the cost of an incorrect
medical diagnosis is different for false positive and
false negative errors.
Problem requirements are the way users set the
focus of the search for a learning algorithm. Users
provide problem requirements in terms of
performance metrics. When a classifier’s
performance is measured, the resulting score is
computed from the model’s confusion matrix or area
under the ROC curve, based on the user
requirements. Both the confusion matrix of a
classifier and the area under ROC are computed in
the initialization phase, when evaluating the
performance of a trained model (using 10-fold cross
validation).
The Accuracy (6) of a classifier is the percentage
of test instances that are correctly classified by the
model (also referred to as the recognition rate).
Accuracy selects learning algorithms with the
highest rate of correct classification but it is a weak
metric for imbalanced problems. For example, if the
number of negative cases in the test sample is much
larger than the positive cases, even if all positive
cases are misclassified, the accuracy will still be
very high.
EVALUATING PREDICTION STRATEGIES IN AN ENHANCED META-LEARNING FRAMEWORK
151

The Recall (true positive rate) (7) is the
proportion of positive cases that were correctly
identified. This metric favors models which focus on
identifying the positive cases, even if this leads them
to misclassifying a number of negative cases as
positive. The system also provides metrics that
maximize the false positive rate (8), the true
negative rate (9) and the false negative rate (10).
∑
,
∑∑
,
(6)
,
∑
,
(7)
∑
,
…
\
∑∑
,
…
…
\
,
∑
(8)
∑∑
,
…
\
…
\
∑∑
,
…
…
\
,
∑
(9)
∑
,
…
\
∑
,
…
,
∑
(10)
The precision is the proportion of the predicted
positive cases that are correctly classified. By
maximizing precision, a model rarely classifies
negative cases as being positive, but may still
misclassify positive cases as negative.
The ROC graph is a representation of the true
positive rate (sensitivity) as a function of the false
positive rate (1-specificity). In case of a perfect
classifier, the area under the ROC curve is 1,
because the false positive rate is 0 while the true
positive rate is 1. This metric is usually employed
when searching for a classifier that maximizes the
number of correctly classified instances.
Besides the fundamental metrics the system
evaluates for a data set, some combined metrics are
available as well. The geometric mean metric (11) is
used to maximize the true positive and the false
positive rate at the same time.
(11)
We also propose the generalized geometric mean – a
generalization of the geometric mean metric for
datasets with more than two classes (12).
,
∑
,
(12)
For allowing users from different areas of expertise
which are interested in discovering a generally good
classifier, we propose a metric which combines the
accuracy, the geometric mean and area under the
ROC curve (13). This metric is obtained by
computing the average of three other metrics, each
being the best in its category, as observed in
(Caruana,2004).
3
(13)
4 EXPERIMENTS ON AN
ENHANCED VERSION OF THE
FRAMEWORK
When first proposing a framework for classifier
selection in (Cacoveanu, 2009) we focused on
selecting a wide range of dataset features and
improving classifier prediction time. In the attempt
to improve the prediction capabilities of our
framework, we automated the voluntary addition of
new data sets. The prediction was performed by
using a KNN classifier which computed the
distances between the analyzed data set and all data
sets stored in the system. It then selected the three
closest data sets as neighbors and estimated the
predicted performance as the mean between the
performances obtained by a classifier on the
neighboring data sets.
As an improvement to our data set classification
system, we considered the possibility of using
different strategies when selecting the similar
problems to the one we are analyzing and the way
neighboring problems affect the final performance
predictions. We are also trying to answer the
question of how different strategies behave when
making performance predictions for different
metrics. An ideal solution would be to find a set of
approaches that gives the best results for all metrics,
and always use them. However, if the selection of a
given tactic influences the predictions for different
metrics generated by the framework, we may
consider always using the best strategies for the
metric selected by the user.
We have divided the classifier accuracy
prediction process into three phases: distance
computation, neighbor selection and prediction
computation (or voting). For each of these phases we
propose several strategies (detailed in the next sub-
sections).
4.1 Distance Computation
The distance computation phase consists in
computing the distance between the currently
analyzed dataset and all the datasets stored in the
system database. The distance is computed by using
the data set meta-features (all having numeric
values) as coordinates of the data set. By
representing a data set as a point in a vector space,
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
152

the distance can be evaluated using any metric
defined on a vector space (14).
(
,
,…,
), m=number of features
(14)
The first distance computation strategy implemented
is the normalized Euclidean distance (E). The
Euclidean distance is the ordinary distance between
two points in space, as given by the Pythagorean
formula (15). The obtained distances are normalized
in the [0,1] set.
,
(15)
Another distance evaluation available in our
framework is the Chebyshev distance (C). The
Chebyshev distance is a metric defined on a vector
space where the distance between two vectors is the
greatest of their differences along any coordinate
dimension. In our system, the largest difference
between dataset features is the distance between two
datasets (16). These distances are also normalized.
,
max
1,
(16)
The advantage of the Chebyshev distance
computation strategy is that it takes less time to
decide the distances between datasets. A possible
problem with the Chebyshev distance is allowing
one single feature to represent a dataset. One single
largest feature might not offer enough description of
the dataset to lead to accurate neighbor selection and
final predictions. As a solution we propose a
variation of the Chebyshev distance (C3), where the
largest three differences between features are
selected and their mean is computed (17). By using
this strategy, the dataset information that is used in
the distance computation process increases but the
computation remains more efficient than the
Euclidean distance.
1,
,
max
1,1
,
∑
3
(17)
4.2 Neighbor Selection
Neighbor selection decides which datasets will
influence the performance predictions for the
analyzed dataset. While considering as neighbors the
datasets closer to the analyzed dataset is justified,
how many datasets should be considered is an open
problem. If we choose a fixed number of neighbors
we make sure the prediction computation will
always take the same amount of time. We implement
the Top 3 neighbor selection strategy (T3) which
selects the 3 closest datasets as neighbors. Selecting
the closest n neighbors is a sensible decision for a
strategy, but there could be cases in which the
closest n datasets are still quite far. Another
approach would be setting a threshold distance after
which a dataset is not considered a neighbor
anymore. By using a fixed threshold value we risk
getting into situations in which not one dataset will
be considered a neighbor and we will not be able to
compute the performance predictions. A solution
would be to have a variable threshold depending on
the average distance between every two datasets in
the system at the moment a new dataset arrives, but
this solution means updating the average distance
every time a new dataset arrives in the system and
holding a different threshold value for all the
distance computation strategies in the system. We
chose to implement a strategy similar to the variable
threshold considered above, only this time we
compute the average distance between the analyzed
dataset and all the datasets in the system and select
as neighbors only datasets closer than this average
distance. We call this strategy Above-Mean
neighbor selection (AM). This strategy selects a
variable number of neighbors every time and the
performance predictions computation time increases
considerably.
4.3 Prediction Computation (Voting)
In this last phase of the prediction process the
classifier performance predictions are generated.
Voting strategies define the way neighboring
datasets influence the final predictions. Each
neighbor casts a performance score to each classifier
in the system. The performance score for a classifier
depends on the performance of its model on the
dataset (the confusion matrix, the area under ROC)
evaluated from the point of view of the metric
selected by the user. These scores are combined to
obtain the final score for each classifier. This final
score is the actual predicted performance for that
classifier. Classifiers are then ordered based on the
predicted performances.
We have implemented two voting strategies in
the system, the first one of them being equal, or
democratic, voting (D). Each neighbor selected in
the previous phase predicts a performance for the
current classifier. We sum all the performances and
divide them by the number of neighbors (18). The
result is the predicted performance of the current
classifier. Each neighbor has the same influence in
deciding the final performance of a classifier.
EVALUATING PREDICTION STRATEGIES IN AN ENHANCED META-LEARNING FRAMEWORK
153
∑
,
n = number of neighbors
= performance obtained on dataset i,
with classifier c,
= predicted performance for classifier c
(18)
The second voting strategy is weighted voting (W).
For this, the distances between the analyzed dataset
and its neighbors act as the weight of the neighbor
vote – a closer dataset will have a higher weight and
more influence on the final prediction (19).
1
,
∑
1
,
∑
, = analyzed dataset,
= neighbor i
(19)
4.4 Experimental Results
This section presents the results of the evaluations
performed with our framework to find the
combination of strategies that works best in
predicting performance scores for the learning
algorithms in the system.
We initialized our system with 26 benchmark
datasets that range from very small to medium sizes
(up to 4000 instances) (UCI, 2010). Also, the
following classifiers are available: BayesNet, J48,
MultilayerPerceptron, AdaBoost, NaiveBayes,
SMO, PART, libSVM.
We have performed evaluations with all the
possible combinations of the implemented strategies
for distance computation, neighbor selection and
performance score prediction (Table 2).
Table 2: Strategy combinations.
Distance
computation
strategy
Neighbor
selection
strategy
Voting
strategy
Notation
E T3 D E-T3-D
E T3 W E-T3-W
E AM D E-AM-D
E AM W E-AM-W
C T3 D C-T3-D
C T3 W C-T3-W
C AM D C-AM-D
C AM W C-AM-W
C3 T3 D C3-T3-D
C3 T3 W C3-T3-W
C3 AM D C3-AM-D
C3 AM W C3-AM-W
E = Normalized Euclidean distance
C = Normalized Chebyshev distance
C3 = Normalized Top 3 Chebyshev distance
T3 = Top 3 neighbor selection
AM = Above Mean neighbor selection
D = Equal (Democratic) voting
W = Weighted voting
For a test, we selected a performance metric and
executed the following steps:
1. Selected a strategy combination
a. Selected a dataset and used it as the analyzed
dataset
i. Used the remaining 25 datasets as datasets
stored in the system
ii. Used the selected strategy combination to
predict performances
iii. Compare the predicted performances with
the actual performances obtained in the
initialization stage on the selected dataset
b. Select next dataset
2. compute the deviation mean and the absolute
deviation mean on all datasets and classifiers for
this strategy
3. select next strategy combination
We have applied the above strategy for the
following metrics: accuracy, geometric mean,
generalized geometric mean, area under ROC,
general purpose metric.
In total, we ran 312 prediction tests for each
selected metric.
We have computed the deviation between the
predicted and true performance as the difference
between the performance prediction and the actual
performance (20). If the system predicted a classifier
will obtain a higher performance than it actually
obtains, this value will be negative.
|
|
=performance prediction,
=actual performance
(20)
The absolute deviation between a performance
prediction and the actual performance is the absolute
value of the difference between the two (20).
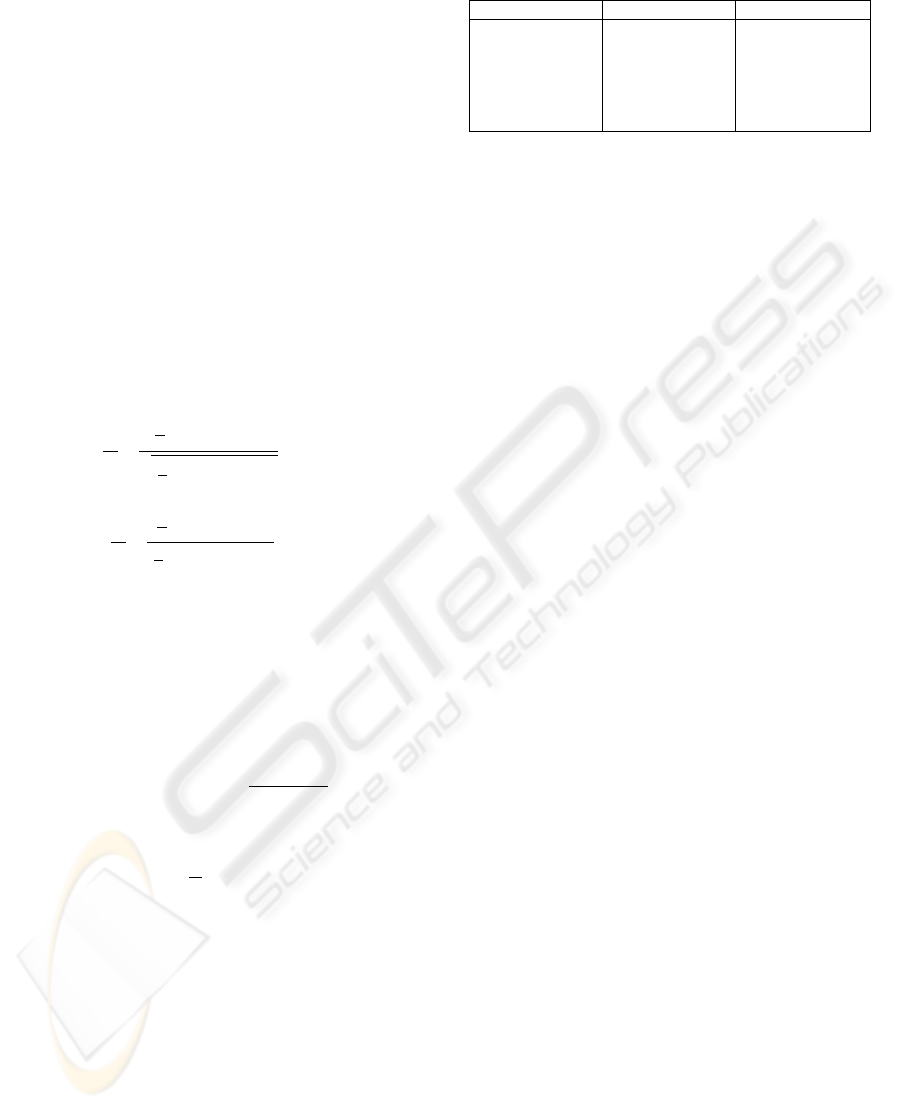
Figure 3: Absolute deviation mean.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
154
Our interest is to select the strategies that minimize
the deviation means for all the metrics. By studying
the absolute deviation mean results (Figure 3), we
observe that voting strategies do not influence the
final predictions very much. Weighted voting (W)
obtains better results than democratic voting (D), but
the difference is so small that it does not justify the
additional resources needed to compute the weight
of each neighbor. Moreover, we observe that the
distance computation and neighbor selection
strategies that obtain the smallest absolute deviations
are, in order: (1) Top 3 Chebyshev distance with
Top 3 neighbor selection, (2) Chebyshev distance
with Top 3 neighbor selection and (3) Chebyshev
distance with Above Mean neighbor selection.
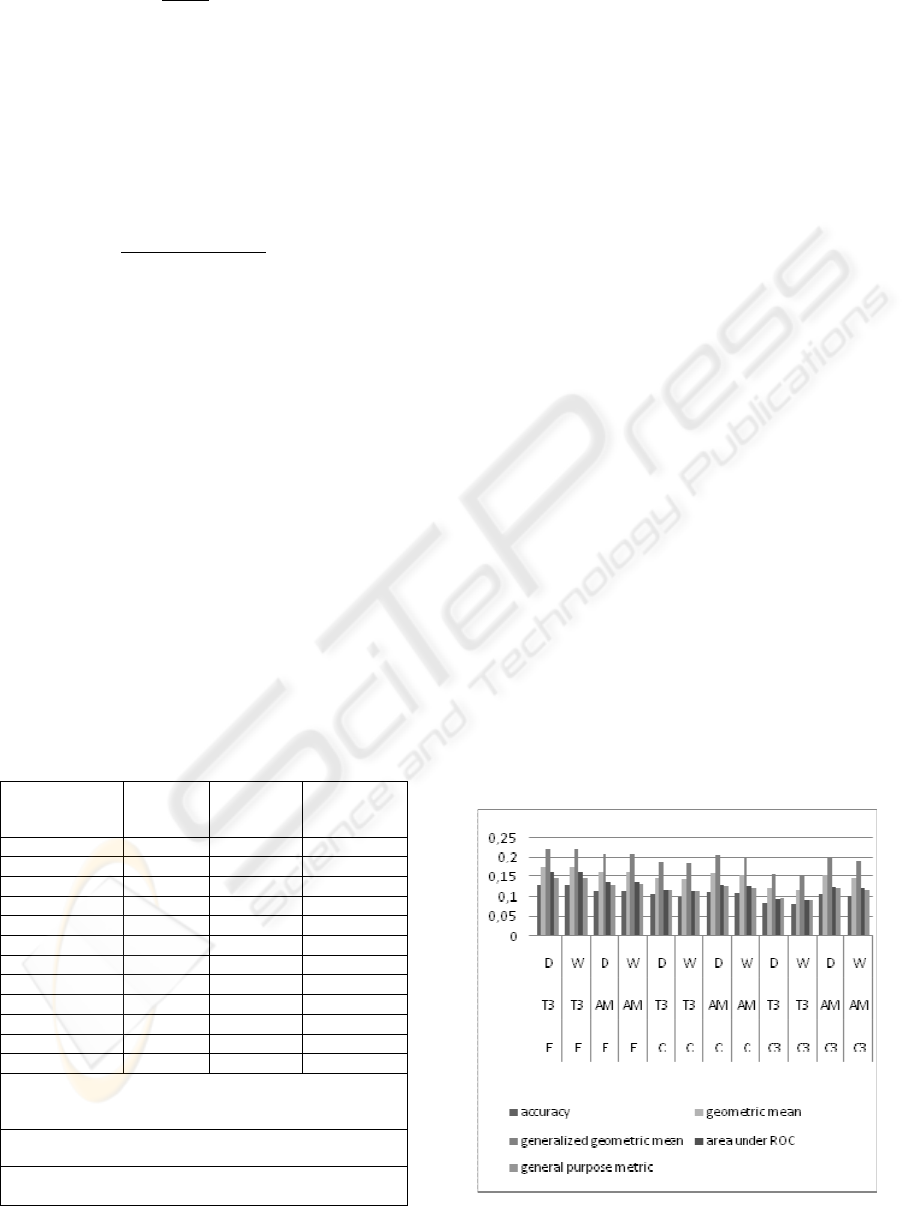
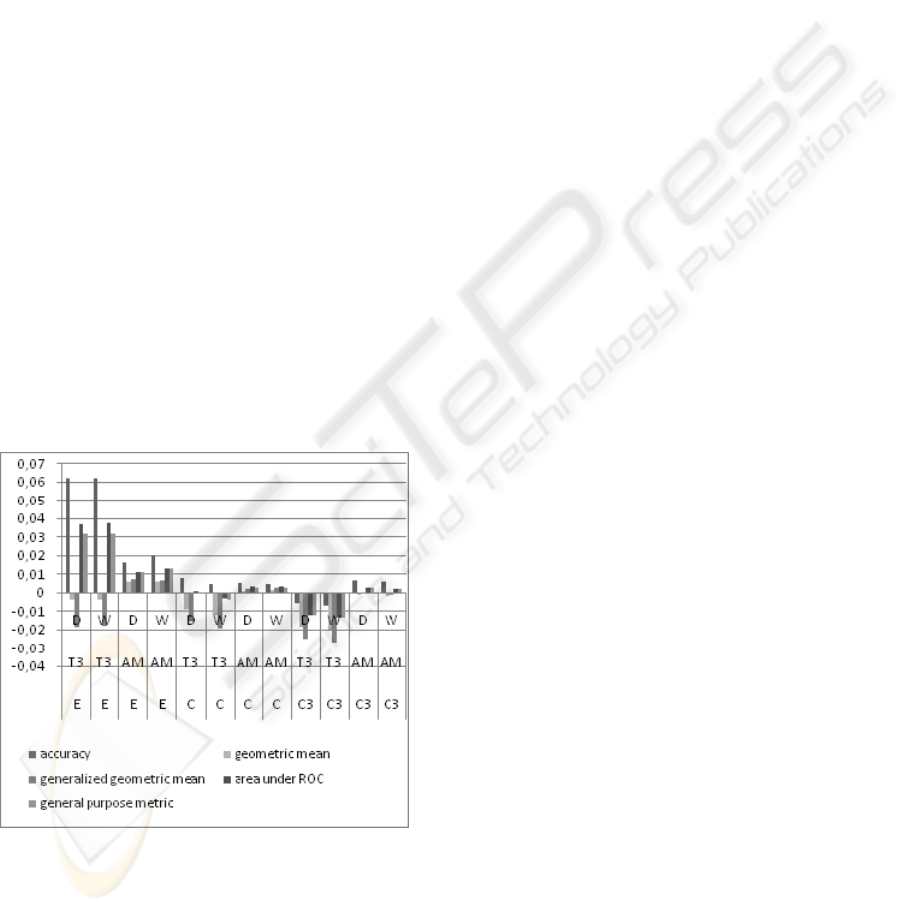
By analyzing the deviation mean results table
(Figure 4) we can deduce more details on how each
of the three selected strategy combinations work.
Our first choice, Top 3 Chebyshev distance with Top
3 neighbor selection, has negative deviation means
for all the metrics. From this we deduce that the
strategy combination is overly optimistic – most of
the time it will predict performances that are not met
when we derive the model and evaluate it. We
would prefer that our system slightly underestimates
the performance of a model on a new dataset. We
can observe that the second strategy combination,
Chebyshev distance with Top 3 neighbor selection,
makes optimistic
Figure 4: Deviation mean.
predictions for all metrics except accuracy. This
strategy combination is the best choice when
predicting classifier accuracy, but is not appropriate
for the other metrics in the system. The last strategy
combination, Chebyshev distance with Above Mean
neighbor selection, obtains positive deviation means
for all metrics. This is the preferred behavior for our
system and we can conclude that this is the best
combination of strategies.
We can observe from both Figure 4 and Figure
3 that the deviation mean of the general purpose
metric is close to the average deviation means of the
other metrics. Therefore, we can confirm the
conclusion in (Caruana,2004) that a general-purpose
metric has the best correlation with the other
metrics.
5 CONCLUSIONS AND FUTURE
WORK
This paper describes the architecture of an
automated learner selection framework. We focus on
the enhancements considered and tested for the
system described in (Cacoveanu, 2009). These
enhancements consist in increasing the dataset pool,
adding new performance metrics and meta-features
and improving the prediction accuracy of the
system. The increase in metrics widens the
evaluation criteria and allows a more problem-
specific assessment of classifiers. Two of the newly
added metrics, the generalised geometric mean and
the general purpose metric, both of them
representing original proposals. Moreover, the
general-purpose metric proposed has suggested a
new approach in dealing with data sets inputs with
no associated metrics. Another enhancement was the
addition of new benchmark data sets. The increase in
the data available to the system improves the
outcome of the neighbor estimation step. We also
implemented the context for adding complex
prediction strategies. We implemented and evaluated
12 strategy combinations for computing the final
performance predictions for classifiers. The analysis
of the results suggest as a best strategy the
Chebyshev distance with Above Mean neighbor
selection and Democratic voting. This strategy will
predict performances close to the actual
performances, without surpassing them. The tests
also reveal that the voting strategies do not
significantly influence the final results. Moreover, in
the case of the accuracy metric we can improve the
performance of our system by using Chebyshev
distance with Top 3 neighbor selection and
Democratic voting.
Since the Chebyshev distance computation
strategy obtains the best results in our system, our
present focus is on discovering the most relevant
data set features, by performing feature selection on
EVALUATING PREDICTION STRATEGIES IN AN ENHANCED META-LEARNING FRAMEWORK
155

the meta-data set or deriving new and more relevant
features (Niculescu-Mizil, 2009). We attempt to
improve the Above Mean neighbor selection
strategy, by computing and constantly updating a
mean distance between every two datasets in our
database. Limiting the neighbor selection strategy as
the number of problems in the system increases is
another present concern. We also want to improve
the system by generating a “best-possible” model.
For this we intend to use different classifiers, each
classifier optimized to increase the true positive rate
on its class, thus maximizing the prediction power of
the model.
ACKNOWLEDGEMENTS
Research described in this paper was supported by
the IBM Faculty Award received in 2009 by Rodica
Potolea from the Computer Science Department of
the Faculty of Computer Science, Technical
University of Cluj-Napoca, Romania.
REFERENCES
Aha D. W., 1992, Generalizing from Case Studies: A Case
Study, Proceedings of the Ninth International
Conference on Machine Learning, pp. 1 -10
Bensusan H., Giraud-Carrier C., Kennedy C. J., 2000, A
Higher-Order Approach to Meta-Learning,
proceedings of the ECML-2000 Workshop on Meta-
Learning: Building Automatic Advice Strategies for
Model Selection and Method Combination, pp. 33-42
Brazdil P. B., Soares C., Da Costa J. P., 2003, Ranking
Learning Algorithms: Using IBL and Meta-Learning
on Accuracy and Time Results, Machine Learning 50,
pp. 251-277
Cacoveanu S., Vidrighin C., Potolea R., 2009, Evolutional
Meta-Learning Framework for Automatic Classifier
Selection, proceedings of the 5th International
Conference on Intelligent Computer Communication
and Processing, Cluj-Napoca, pp. 27-30
Caruana R., Niculescu-Mizil A., 2004, Data Mining in
Metric Space: An Empirical Analysis of Supervised
Learning Performance Criteria, Proceedings of the
Tenth ACM SIGKDD International Conference on
Knowledge Discovery and Data Mining, pp. 69-78
Giraud-Carrier C., Bensusan H., 2000, Discovering Task
Neighbourhoods Through Landmark Learning
Performances, Proceedings of the Fourth European
Conference of Principles and Practice of Knowledge
Discovery in Databases, pp. 325-330
Japkowicz N., Stephen S., 2002, The Class Imbalance
Problem: A Systematic Study, Intelligent Data
Analysis, Volume 6, Number 5, pp. 429-450
Kalousis A., 2002, Algorithm Selection via
Meta_Learning, PhD Thesis, Faculte des sciences de
l’Universite de Geneve
Linder C., Studer R., 1999, Support for Algorithm
Selection with a CBR Approach, Proceedings of the
16th International Conference on Machine Learning,
pp. 418-423
Michie D., Spiegelhalter D. J., Taylor C. C., 1994,
Machine Learning. Neural and Statistical
Classification, Ellis Horwood Series in Artificial
Intelligence
Niculescu-Mizil A., et al, 2009, Winning the KDD Cup
Orange Challenge with Ensemble Selection, JMLR
Workshop and Conference Proceedings 7
Rendel L., Seshu R., Tcheng D., 1987, Layered concept
learning and dynamically variable bias management,
10th Internatinal Joint Conf. on AI, pp. 308-314
Schaffner C., 1993, Selecting a classification method by
cross validation, Machine Learning 13, pp. 135-143
Sleeman D., Rissakis M., Craw S., Graner N., Sharma S.,
1995, Consultant-2: Pre and post-processing of
machine learning applications, International Journal
of Human Computer Studies, pp. 43-63
UCI Machine Learning Data Repository,
http://archive.ics.uci.edu/ml/, last accessed Jan. 2010
Vilalta R., Giraud-Carrier C., Brazdil P., Soares C., 2004,
Using Meta-Learning to Support Data Mining,
Iternational Journal of Computer Science &
Applications, pp. 31-45
Witten I. H., Frank E., 2005, Data Mining: Practical
Machine Learning Tools and Techniques, 2nd edition,
Morgan Kaufmann Publishers, Elsevier Inc.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
156
