
MINING TIMED SEQUENCES WITH TOM4L FRAMEWORK
Nabil Benayadi and Marc Le Goc
LSIS Laboratory, University Saint Jerome, Marseille, France
Keywords:
Sequential patterns, Information-theory, Temporal knowledge Discovering, Chronicles models, Markov pro-
cesses.
Abstract:
We introduce the problem of mining sequential patterns in large database of sequences using a Stochastic
Approach. An example of patterns we are interested in is : 50% of cases of engine stops in the car are
happened between 0 and 2 minutes after observing a lack of the gas in the engine, produced between 0 and
1 minutes after the fuel tank is empty. We call this patterns “signatures”. Previous research have considered
some equivalent patterns, but such work have three mains problems : (1) the sensibility of their algorithms with
the value of their parameters, (2) too large number of discovered patterns, and (3) their discovered patterns
consider only ”after“ relation (succession in time) and omit temporal constraints between elements in patterns.
To address this issue, we present TOM4L process (Timed Observations Mining for Learning process) which
uses a stochastic representation of a given set of sequences on which an inductive reasoning coupled with an
abductive reasoning is applied to reduce the space search. The results obtained with an application on very
complex real world system are also presented to show the operational character of the TOM4L process.
1 INTRODUCTION
The aim of Timed Data Mining techniques is to dis-
cover temporal knowledge from a set of timed mes-
sages sequences.
The general context is given in the Figure 1: a dy-
namic process is monitored with a Monitoring Cog-
nitive Agent (MCA) that writes timed messages in a
database. The dynamic process can be a manufac-
turing process, a telecommunication network or web
servers for example. The timed messages are con-
cerned with alarms or warnings, or with the starting
or the stopping of tasks. The ”learning process” aims
at discovering the temporal knowledge that character-
ize the behavior of the monitored dynamic process to
improve its management. This problematic is nowa-
days crucial in most of the industrial and the service
sectors.
In this paper, we introduce the problems of min-
ing such a pattern : 50% of cases of engine stops in
the car are happened between 0 and 2 minutes after
observing a lack of the gas in the engine, produced
between 0 and 1 minutes after the fuel tank is empty.
We call this patterns “signatures”. Finding signatures
are valuable in many fields, for example, when target-
ing markets using DM (Direct Mail), market analysts
can use signatures to learn what actions they should
take and when they should act to inform their cus-
tomers to buy. In the industrial domain, operators can
use signatures to control and supervise the process
variables before maintaining the process in an equilib-
rium state. Other applications include predicting dis-
ease, forecasting weather, if we find signature : 60%
of storms go through area B between 1 and 3 days
after they strike area A, we can take steps to cope a
disaster in the area B. We propose in this paper the ba-
sis of the TOM4L process (Timed Observations Min-
ing for Learning process) defined to discover signa-
tures among timed messages in large database of se-
quences. TOM4L process avoids also the two remains
problems of Timed Data Mining techniques: the sen-
sibility of the Timed Data Mining algorithms with the
value of their parameters and the too large number of
generated patterns. TOM4L avoids these two prob-
lems with the use of a stochastic representation of a
given set of sequences on which an inductive reason-
ing coupled with an abductive reasoning is applied to
reduce the space search. The next section recalls the
basis of the main Timed Data Mining techniques and
presents a (very) simple illustrative example to show
the main problems of previous approaches. Next, sec-
tion 3 introduces the basis of the TOM4L process and
the section 4 describes the results obtained with an
application of the TOM4L process on very complex
111
Benayadi N. and Le Goc M. (2010).
MINING TIMED SEQUENCES WITH TOM4L FRAMEWORK.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
111-120
DOI: 10.5220/0002958401110120
Copyright
c
SciTePress

Figure 1: Temporal knowledge discovery context.
real world system monitored with a large scale knowl-
edge based system, the Sachem system of the Arcelor-
Mittal Steel group. The section 5 makes a synthesis
of the paper and introduces our current works.
2 RELATED WORKS
Discovering temporal knowledge from the timed mes-
sages is a problem that can be studied from multi-
ple points of view and a lot of scientific domains
are concerned with this problem, specifically Ma-
chine Learning and Data Mining (cf. (Roddick and
Spiliopoulou, 2002) for a complete state of the art).
The Timed Data Mining approachesaims at avoid-
ing this problem. The basic principle consists in using
a representativeness criteria, typically the support of a
sequential pattern, to build the minimal set of sequen-
tial patterns that describes the given set of sequences.
The support s(p
i
) of a pattern p
i
is the number of se-
quences in the set of sequences where the pattern p
i
is observed. A frequent pattern is a pattern p
i
with
a support s(p
i
) greater than a user defined thresholds
s(p
i
) ≥ S. A frequent pattern is interpreted as a reg-
ularity or a condensed representation of the given set
of sequences.
The Timed Data Mining techniques differs de-
pending on whether the initial set of sequences is a
singleton or not. The second case is the simpler be-
cause the decision criteria based on the support is di-
rectly applicable to a set of sequences. One of the first
application can be found in the market basket analysis
(Agrawal and Psaila, 1995) with the AprioriAll algo-
rithm that has been improved with the SPAM (Ayres
et al., 2002) or the SPADE (Zaki, 2001) algorithms.
When the initial set of sequences contains a
unique sequence, the notion of windows has been in-
troduced to define an adapted notion of support. The
first way consists in defining a fixed size of windows
that an algorithm like Winepi (Mannila et al., 1995)
shifts along the sequence: the sequence becomes then
a set of equal length sub-sequences and the support
s(p
i
) of a pattern can be computed (Vilalta and Ma,
2002; Weiss and Hirsh, 1998). The second way con-
sists in building a window for an a priori given pattern
p
i
. With the Minepi algorithm for example (Mannila
and Toivonen, 1996), a window W = [t
s
,t
e
[ is a min-
imal occurrence of p
i
if p
i
occurs in W and not in
any sub-window of W. In practice, a maximal win-
dow size parameter maxwin must be defined to bound
the search space of patterns. A similar approach is
proposed in (Dousson and Duong, 1999) to discover
chronicle models, an abstract representation of pat-
terns.
The Timed Data Mining approaches presents two
main problems. The first is that the algorithms require
the setting of a set of parameters: the discovered pat-
terns depends therefore of the tuning of the algorithms
(Mannila, 2002). The second problem is the number
of generated patterns that is not linear with threshold
value S of the decision criteria s(p
i
) ≥ S. In prac-
tice, to obtain an interesting set of frequent pattern,
S must be small, and the number of frequent is huge
((Han and Kamber, 2006)). But generally, only a very
small fraction of the discovered patterns are interest-
ing. This leads to use interestingness measures to
build a minimal set of frequent patterns having some
potential to be significative. The mostly used interest-
ingness measures are based on the Information the-
ory (Shannon, 1949) like the j-measure (Smyth and
Goodman, 1992) and the mutual information (Cover
and Thomas, 1991). Let us take a simple example to
illustrate these two basic problems of the Timed Data
Mining approaches.
The illustrativeexample is a simple dynamic SISO
system y(t) = F · x(t) where F is a convolution opera-
tor. This example is used trough this paper to illustrate
the claims.
Let us defining two thresholds
ψ
x
and
ψ
y
for the
input variable x(t) and the output variable y(t). These
two thresholds respectively defines two ranges for
each of the variables: rx
0
=] − ∞,
ψ
x
], rx
1
=]
ψ
x
, +∞],
ry
0
=] − ∞,
ψ
y
] and ry
1
=]
ψ
y
, +∞]). Let us suppose
that there exists a (very simple) program that writes
a constant when a signal enter in a range. Such
a program writes the constant 1 (resp. H) when
x(t) (resp. y(t)) enters in the range rx
1
(resp. ry
1
)
and 0 (resp. L) when x(t) (resp. y(t)) enters in
the range rx
0
(resp. ry
0
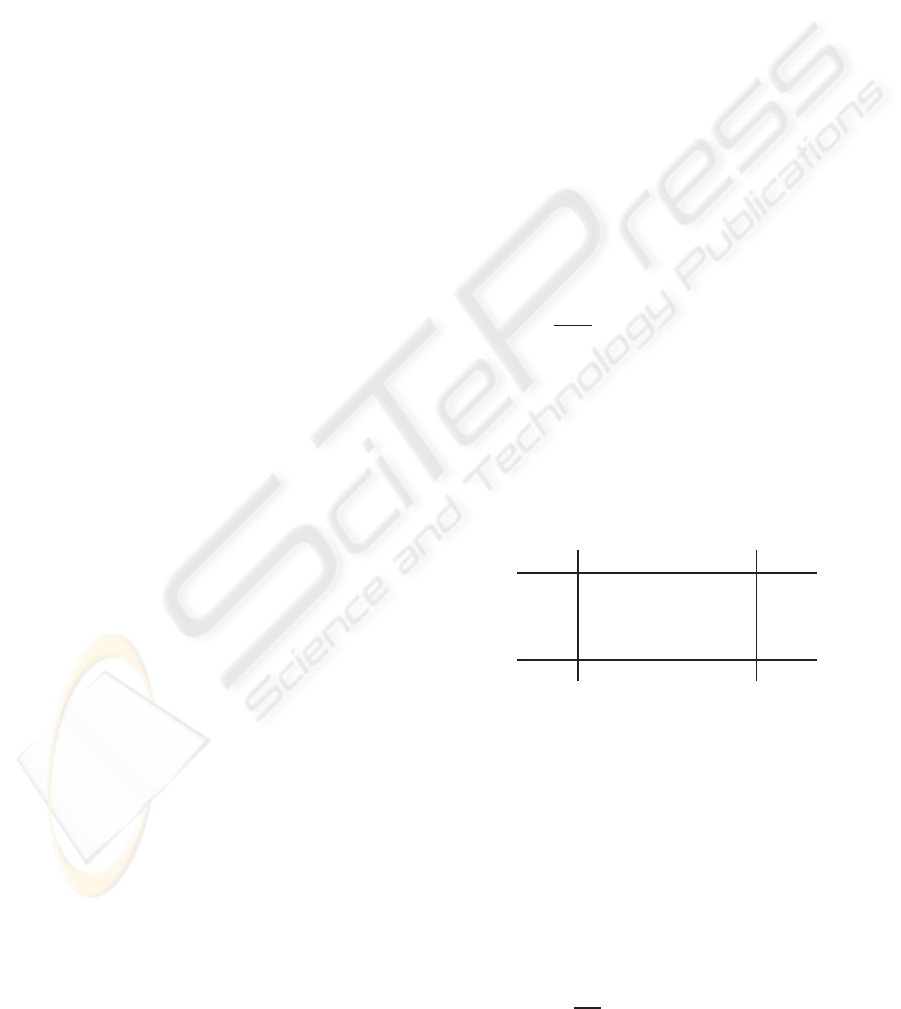
). The evolution of the
x(t) in the figure 2 leads to the following sequence:
ω
= {(1, t
1
), (H,t
2
), (0, t
3
), (L,t
4
), (1, t
5
), (H, t
6
),
(0,t
7
), (L,t
8
), (1,t
9
), (H, t
10
), (0,t
11
), (L,t
12
), (1,t
13
),
(H, t
14
), (0, t
15
), (L,t
16
), (1, t
17
), (H, t
18
), (0, t
19
),
(L,t
20
), (1,t
21
), (H,t
22
), (0,t
23
), (L,t
24
)}.
To illustrate the sensibility of the Winepi and the
Minepi algorithms with the parameters, we defines
two sets of parameters and apply the algorithms to the
sequence
ω
. In the first set of parameters, the window
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
112
x(t)
t
y(t)
t
ω
1
ω
0
1 3 5 7 9 11 13 15 17 19 21 23
t
ω
H
ω
L
2 4 5 8 10 12 14 16 18 20 22 24
t
x
y
1
0
H
L
Figure 2: Temporal evolution of variables x and y.
width w and window movement v for Winepi are both
set to 4 (this is the ideal tuning) and for Minepi, the
max window is set to 4 and the minimal frequency is
fixed to 6 (this is also the ideal tuning). In the sec-
ond set of parameters, the window width and window
movement of Winepi are equal to 8 and the support
is equal to 3. The minimal frequency for Minepi is
set to 8. The table 1 provides the number of patterns
discovered by each algorithm with the two sets of pa-
rameters.
These two experimentations show the sensibility
of the Winepi and the Minepi algorithms with the pa-
rameters: from the first set to the second, the number
of patterns increase of more than 626% for Winepi,
and more than 18666% from Minepi. The main prob-
lem is the too large number of discovered patterns.
The paradox is then the following: to find the ideal set
of parameters that minimizes the number of discov-
ered patterns, the user must know the system while
this is precisely the global aim of the Data Mining
techniques. There is then a crucial need for another
type of approach that is able to provide a good solu-
tion for such a simple system and provide operational
solutions for real world systems. The aim of this pa-
per is to propose such an approach: the TOM4L pro-
cess (i.e. Timed Observation Mining for Learning)
which find only 4 relations with the example without
any parameters.
Table 1: Number of discovered patterns.
Winepi Minepi
First parameter set 15 15
Second parameter set 94 2800
3 FINDING SIGNATURES
The TOM4L process is based on the Theory of Timed
Observations of (Le Goc, 2006) that defines an in-
ductive reasoning and an abductive reasoning on a
stochastic representation of a set of sequences Ω =
{
ω
i
}, this set being or not a singleton.
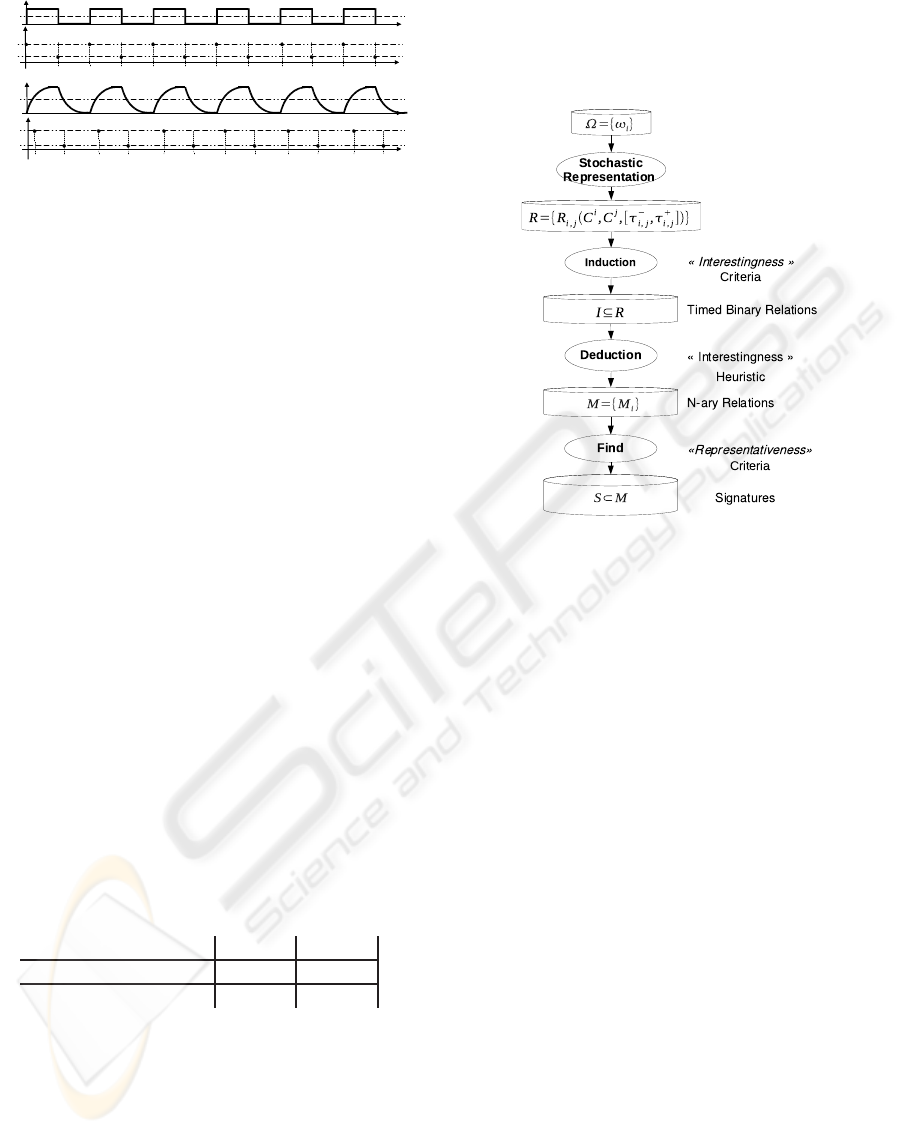
This theory provides the mathematical foundations of
the four steps Timed Data Mining process of Figure
3 that reverses the usual Data Mining process in or-
der to minimize the size of the set of the discovered
patterns:
Figure 3: The four steps of TOM4L approch.
1. Stochastic Representation of a set of sequences
Ω = {
ω
i
}. This step produces a set of timed bi-
nary relations of the form R
i, j
(C
i
,C
j
, [
τ
−
i, j
,
τ
+
i, j
]).
2. Induction of a minimal set of timed binary rela-
tions. This step uses an interestingness criteria
based on the BJ-measure describes in the follow-
ing section.
3. Deduction of a minimal set of n-ary relations.
This step uses an abductive reasoning to build a
set of n-ary relations that have some interest ac-
cording to a particular problem.
4. Find the minimal set of n-ary relations being rep-
resentatives according to the problem. This step
corresponds to the usual search step of sequential
patterns in a set of sequences in Minepi or Winepi.
The discovered n-ary relations discovered in the last
step are called signatures. The next section provides
the basic definitions of the Timed Observations The-
ory.
3.1 Basic Definitions
A discrete event e
i
is a couple (x
i
,
δ
i
) where x
i
is
the name of a variable and
δ
i
is a constant. The
constant
δ
i
denotes an abstract value that can be as-
signed to the variable x
i
. The illustrative example al-
lows the definition of a set E of four discrete events:
E = {e
1
≡ (x, 1), e
2
≡ (x, 0), e
3
≡ (y, H), e
4
≡ (y, L)}.
MINING TIMED SEQUENCES WITH TOM4L FRAMEWORK
113
A discrete event class C
i
= {e
i
} is an arbitrary set of
discrete event e
i
= (x
i
,
δ
i
). Generally, and this will be
true in the suite of the paper, the discrete event classes
are defined as singletons because when the constants
δ
i
are independent, two discrete event classes C
i
=
{(x
i
,
δ
i
)} and C
j
= {(x
j
,
δ
j
)} are only linked with the
variables x
i
and x
j
((Le Goc, 2006)). The illustrative
example allows the definition of a set Cl of 4 discrete
event classes: Cl = {C
1
= {e
1
}, C
0
= {e
0
}, C
L
= {e
L
},
C
H
= {e
H
}}.
An occurrence o(k) of a discrete eventclassC
i
= {e
i
},
e
i
= (x
i
,
δ
i
), is a triple (x
i
,
δ
i
,t
k
) where t
k
is the time
of the occurrence. An occurrence o(k) ≡ (x
i
,
δ
i
,t
k
)
is called a timed observation in (Le Goc, 2006) be-
cause it can always be interpreted as the assignation
of the abstract value
δ
j
to the variable x at time t
k
(i.e. o(k) ⇔ x(t
k
) =
δ
i
). The idea is that a timed ob-
servation is supposed to be written by a program that
implements the following specification:
∃t
k−1
,t
k
∈ ℜ, t
k−1
< t
k
,
x
i
(t
k−1
) ≤
ψ
i
∧ x
i
(t
k
) >
ψ
i
⇒ o(k) ≡ (x
i
,
δ
i
,t
k
)
(1)
When useful, the rewriting rule o(k) ≡ (x
i
,
δ
i
,t
k
) ≡
C
i
(k) will be used in the following.
A sequence Ω = {o(k)}
k=1...n
, is an ordered set
of n occurrences C
i
(k) ≡ (x
i
,
δ
i
,t
k
). The illustra-
tive example defines the following sequence: Ω =
{(C
1
(1), C
H
(2), C
0
(3), C
L
(4), C
1
(5), C
H
(6), C
0
(7),
C
L
(8), C
1
(9), C
H
(10), C
0
(11), C
L
(12), C
1
(13), C
H
(14),
C
0
(15), C
L
(16), C
1
(17), C
H
(18), C
0
(19), C
L
(20), C
1
(21),
C
H
(22), C
0
(23), C
L
(24)}. As a consequence, a se-
quence Ω = {o(k)}
k=1...n
defines:
• A set K = {k}, k ∈ ℵ, of time index.
• A set Γ = {t
k
}, t
k
∈ ℜ of times generated by a
continuous clock structure (t
k−2
− t
k−1
6= t
k−1
−
t
k
).
• A set ∆ = {
δ
i
} of constants.
• A set X = {x
i
} of variables.
• A set E = {e
i
} of discrete event e
i
= (x
i
,
δ
i
) de-
fined on X × ∆.
• A set Cl = {C
i
} of discrete event classes (also
called timed observation classes).
Le Goc (Le Goc, 2006) shows that when the con-
stants
δ
i
∈ ∆ are independent, a sequence Ω = {o(k)}
defining a set Cl = {C
i
} of m classes is the superposi-
tion of m sequences
ω
i
= {C
i
(k)}:
Ω = {o(k)} =
[
i=1...m
ω
i
= {C
i
(k)} (2)
The Ω sequence of the illustrative example is then
the superposition of four sequences
ω
i
= {C
i
(k)}:
ω
1
= {C
1
(1),C
1
(5),C
1
(9),C
1
(13),C
1
(17),C
1
(21)}
ω
0
= {C
0
(3),C
0
(7),C
0
(11),C
0
(15),C
0
(19),C
0
(23)}
ω
L
= {C
L
(4),C
L
(8),C
L
(12),C
L
(16),C
L
(20),C
L
(24)}
ω
H
= {C
H
(2),C
H
(6),C
H
(10),C
H
(14),C
H
(18),C
H
(22)}
3.2 Stochastic Representation
The stochastic representation transforms a set of
sequences
ω
i
= { o(k)} in a Markov chain X =
(X(t
k
);k > 0) where the state space Q = {q
i
}, i =
1. . . m, of X is confused with the set of m classes
Cl = {C
i
} of Ω =
[
i
ω
i
.
Consequently, two successive occurrences (C
i
(k− 1),
C
j
(k)) correspondto a state transition in X: X(t
k−1
) =
q
i
−→ X(t
k
) = q
j
. The conditional probability
P[X(t
k
) = q
j
|X(t
k−1
) = q
i
] of the transition from a
state q
i
to a state q
j
in X corresponds then to the
conditional probability P
C
j
(k) ∈ Ω|C
i
(k− 1) ∈ Ω
of observing an occurrence of the class C
j
at time t
k
knowing that an occurrence of a class C
i
at time t
k−1
has been observed:
∀i, j, ∀k ∈ K,
P[X(t
k
) = q
j
|X(t
k−1
) = q
i
] = P
C
j
(k) ∈ Ω|C
i
(k− 1) ∈ Ω
≡ p
ij
=
N
ij
m
∑
l,l6=i
N
il
The transition probability matrix P = [p
i, j
] of X
is computed from the contingency table N = [n
i, j
],
where n
i, j
∈ N is the number of couples (C
i
(k),C
j
(k+
1)) in Ω. The table 2 is the contingency table N of the
sequence Ω of the illustrative example.
Table 2: Contingency table N = [n
i, j
] of Ω.
C
1
C
0
C
H
C
L
Total
C
1
0 0 6 0 6
C
0
0 0 0 6 6
C
H
0 6 0 0 6
C
L
5 0 0 0 5
Total 5 6 6 6 23
The stochastic representation of a given set
Ω of sequences is then the definition of a set
R = {R
i, j
(C
i
,C
j
, [
τ
−
ij
,
τ
+
ij
])} where each the condi-
tional probability p
i, j
= P
C
j
(k) ∈ Ω|C
i
(k− 1) ∈ Ω
of each binary relation R
i, j
(C
i
,C
j
, [
τ
−
ij
,
τ
+
ij
]) is
not null. The timed constrains [
τ
−
ij
,
τ
+
ij
] is pro-
vided by a function of the set D of delays
D = {d
ij
} = {(t
k
j
− t
k
j
)} computed from the bi-
nary superposition of the sequences
ω
i, j
=
ω
i
∪
ω
j
:
τ
−
ij
= f
−
(D),
τ
+
ij
= f
+
(D). For example, the au-
thors of (Bouch´e, 2005) use the properties of the
Poisson law to compute the timed constraints:
τ
−
ij
= 0,
τ
+
ij
=
1
λ
i, j
where
λ
i, j
is the Poisson rate (i.e.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
114
the exponential intensity) of the exponential law that
is the average delay d
ij
moy
=
∑
(d
ij
)
Card(D)
. But more
frequently, a min-max approach is used (Dousson and
Duong, 1999) :
τ
−
ij
= min(D
ij
),
τ
+
ij
= max(D
ij
).
The set R of the illustrative example is the
following: R = {R
1,H
(C
1
,C
H
, [
τ
−
1,H
,
τ
+
1,H
]),
R
0,L
(C
0
,C
L
, [
τ
−
0,L
,
τ
+
0,L
]), R
H,0
(C
H
,C
0
, [
τ
−
H,0
,
τ
+
H,0
]),
R
L,1
(C
L
,C
1
, [
τ
−
L,1
,
τ
+
L,1
])}.
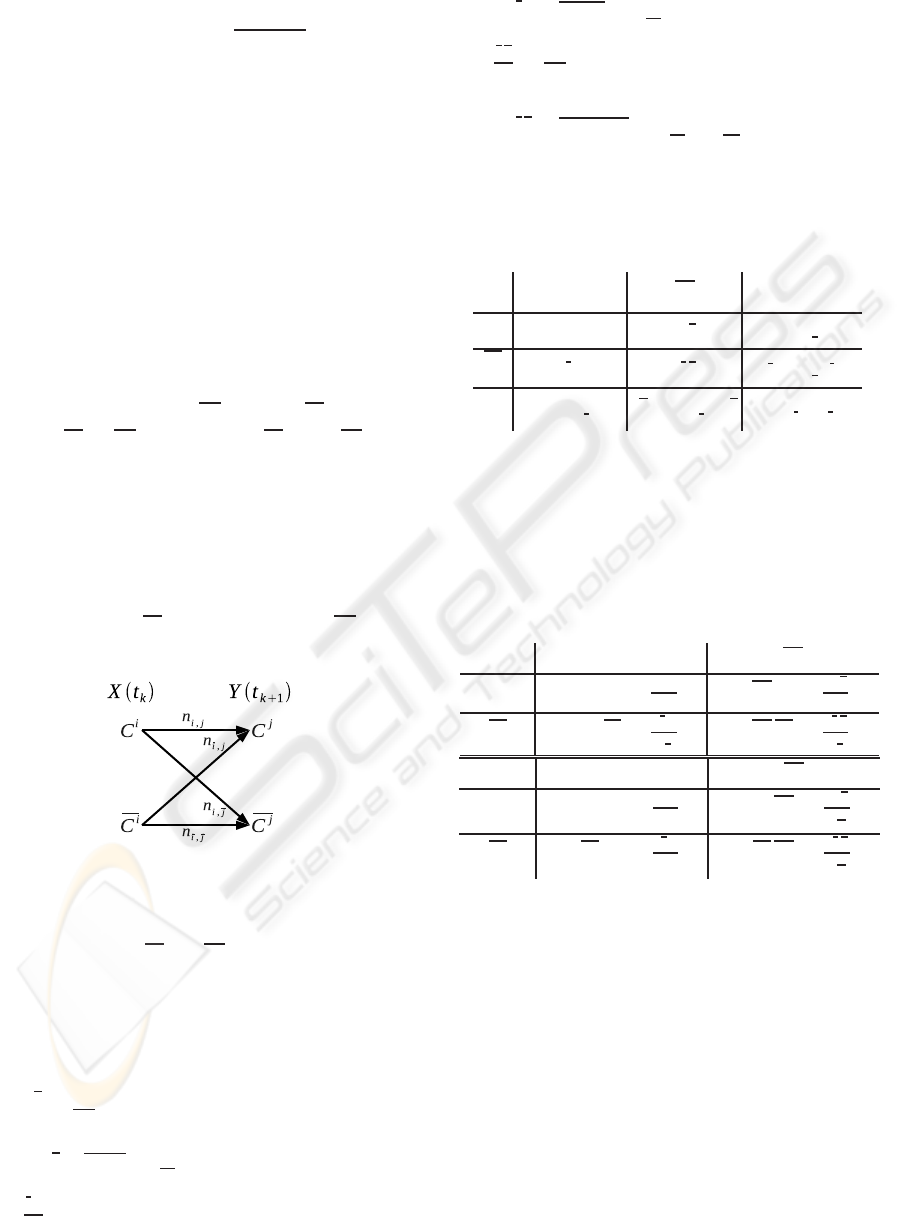
3.3 Discrete Binary Memoryless
Channel Model
Considering a binary relation R
i, j
(C
i
,C
j
, [
τ
−
ij
,
τ
+
ij
]), a
sequence Ω defining the set Cl of m classes with n
occurrences contains n − 1 couples (o(k), o(k + 1)).
Each of them is one of the four following types:
(C
i
(k),C
j
(k + 1)), (C
i
(k),C
j
(k + 1)), (C
i
(k),C
j
(k +
1)), and (C
i
(k),C
j
(k + 1)), where C
i
(resp. C
j
) is an
abstract class denoting any classes of Cl but C
i
(resp.
C
j
).
The n−1 couples (o(k), o(k+ 1)) can then be seen as
n− 1 realizations of one of the four relations linking
two abstract binary variables X and Y of a discrete bi-
nary memoryless channel in a communication system
according to the information theory (Shannon, 1949),
where X(t
k
) ∈ {C
i
,C
i
} and Y(t
k+1
) ∈ {C
j
,C
j
} (Fig-
ure 4).
Figure 4: Two abstract binary variables connected by a dis-
crete memoryless channel.
To use this model, the number of occurrences of
the abstract classes C
i
and C
j
can not be the number
of the occurrences of the classes Cl −C
i
and Cl −C
j
but an average value:
• n
i, j
is the number of couples (C
i
(k),C
j
(k+ 1)) in
Ω.
• n
i, j
is the average number of couples
(C
i
(k),C
j
(k+ 1)) in Ω:
• n
i, j
=
1
m− 1
∑
∀C
l
∈C
j
n
i,l
.
• n
i, j
is the average number of couples
(C
i
(k),C
j
(k+ 1)) in Ω:
• n
i, j
=
1
m− 1
∑
∀C
l
∈C
i
n
l, j
• n
i, j
is the average number of couples
(C
i
(k),C
j
(k+ 1)) in Ω:
• n
i, j
=
1
(m− 1)
2
∑
∀C
l
∈C
i
,∀C
f
∈C
j
n
l, f
This leads to m·(m− 1) binary contingency tables
of the form of the Table 3.
Table 3: Contingency table for X and Y.
@
@
X
Y
C
j
C
j
∑
C
i
n
i, j
n
i, j
n
i
=
∑
y∈{ j, j}
n
i,y
C
i
n
i, j
n
i, j
n
i
=
∑
y∈{ j, j}
n
i,y
∑
n
j
=
∑
x∈{i,i}
n
x, j
n
j
=
∑
x∈{i,i}
n
x, j
N =
∑
x∈{i,i},y∈{ j, j}
n
x,y
These contingency tables allow computing
two conditional probabilities matrix P
s
(i.e.
P(Y(t
k+1
)|X(t
k
))) and P
p
(i.e. P(X(t
k
)|Y(t
k+1
))(Table
4). These two matrix allow the definition of the BJ-
measure to build a criteria to evaluate the interest of a
binary relation R
i, j
(C
i
,C
j
, [
τ
−
ij
,
τ
+
ij
]).
Table 4: P
s
and P
p
matrix.
P
s
C
j
C
j
C
i
p(C
j
|C
i
) =
n
i, j
n
i
p(C
j
|C
i
) =
n
i, j
n
i
C
i
p(C
j
|C
i
) =
n
i, j
n
i
p(C
j
|C
i
) =
n
i, j
n
i
P
p
C
j
C
j
C
i
p(C
i
|C
j
) =
n
i, j
n
j
p(C
i
|C
j
) =
n
i, j
n
j
C
i
p(C
i
|C
j
) =
n
i, j
n
j
p(C
i
|C
j
) =
n
i, j
n
j
3.4 Evaluating the Interestingness of
Binary Relations
The idea for defining an efficient interestingness crite-
ria to induce binary relations is that if knowing C
i
(k)
increases the probability of observing C
j
(k + 1) (i.e.
p(C
j
|C
i
) > p(C
j
)), then the observation C
i
(k) pro-
vides some information about an observation C
j
(k +
1) (Blachman, 1968).
We propose then to use the distance of Kullback-
Leibler D(p(Y|X = C
i
)kp(Y)) to evaluate the relation
between the a priori distribution p(C
j
) of an observa-
tion C
j
(k) and the conditional distribution p(C
j
|C
i
):
MINING TIMED SEQUENCES WITH TOM4L FRAMEWORK
115

D(p(Y|X = C
i
)kp(Y)) =
p(Y = C
j
|X = C
i
) ×log
2
p(Y=C
j
|X=C
i
)
p(Y=C
j
)
+
p(Y = C
j
|X = C
i
) ×log
2
p(Y=C
j
|X=C
i
)
p(Y=C
j
)
(3)
One of the property of this distance is that
D(p(Y|X = C
i
)kp(Y)) = 0 when p(Y = C
j
|X = C
i
) =
p(Y = C
j
). This property means that when the distri-
butions p(Y = C
j
) and p(X = C
i
) are independent, the
Kullback-Leibler distance is null. This allows to de-
compose the Kullback-Leibler distance in two terms.
Definition 1. The BJL-measure BJL(C
i
,C
j
) of binary
relation R(C
i
,C
j
) is the right part of the Kullback-
Leibler distance D(p(Y|X = C
i
)kp(Y)):
• p(Y = C
j
|X = C
i
) < p(Y = C
j
) ⇒ BJL(C
i
,C
j
) =
0
• p(Y = C
j
|X = C
i
) ≥ p(Y = C
j
) ⇒ BJL(C
i
,C
j
) =
D(p(Y|X = C
i
)kp(Y))
Considering the discrete memoryless binary chan-
nel (Figure 4), the BJL(C
i
,C
j
) is not null when
the observation C
i
(k) provides some information
about the observation C
j
(k). Symmetrically, when
BJL(C
i
,C
j
) = 0, the observationC
i
(k) provides some
information about any observations but C
j
(k), that is
to say about an observation C
j
(k). This leads to de-
fine the BJL-measure BJL(C
i
,C
j
) of a binary relation
R(C
i
,C
j
):
Definition 2. The BJL-measure BJL(C
i
,C
j
) of a bi-
nary relation R(C
i
,C
j
) is the left part of the Kullback-
Leibler distance D(p(Y|X = C
i
)kp(Y)):
• p(Y = C
j
|X = C
i
) < p(Y = C
j
) ⇒ BJL(C
i
,C
j
) =
D(p(Y|X = C
i
)kp(Y))
• p(Y = C
j
|X = C
i
) ≥ p(Y = C
j
) ⇒ BJL(C
i
,C
j
) =
0
This leads to the decomposition of the Kullback-
Leibler distance property:
D(p(Y|C
i
)kp(Y)) = BJL(C
i
,C
j
) + BJL(C
i
,C
j
) (4)
Looking at the Figure 4, the definition of the BJL-
measure decomposes the information provided by the
assignation X(t
k
) = C
i
(i.e. an observation C
i
(k)) be-
tween the assignation Y(t
k+1
) = C
j
(i.e. the obser-
vation C
j
(k + 1)) and the assignation Y(t
k+1
) = C
j
(i.e. the observation C
j
(k + 1)). In other words, the
BJL-measure evaluates the information distribution
between the next successor (C
j
(k + 1) or C
j
(k + 1))
of an observation C
i
(k) at time t
k
. The same rea-
soning can be done when considering the information
distribution between the predecessors X(t
k
) = C
i
or
X(t
k
) = C
i
of the assignation Y(t
k+1
) = C
j
:
Definition 3. The BJW-measure BJW(C
i
,C
j
) of
binary relation R(C
i
,C
j
) is the right part of the
Kullback-Leibler distance D(p(X|Y = C
j
)kp(X)):
• p(X = C
i
|Y = C
j
) < p(X = C
i
) ⇒ BJW(C
i
,C
j
) =
0
• p(X = C
i
|Y = C
j
) ≥ p(X = C
i
) ⇒ BJW(C
i
,C
j
) =
D(p(X|Y = C
j
)kp(X))
Symmetrically:
Definition 4. The BJW-measure BJW(C
i
,C
j
) of bi-
nary relation R(C
i
,C
j
) is the left part of the Kullback-
Leibler distance D(p(X|Y = C
j
)kp(X)):
• p(X = C
i
|Y = C
j
) < p(X = C
i
) ⇒ BJW(C
i
,C
j
) =
D(p(X|Y = C
j
)kp(X))
• p(X = C
i
|Y = C
j
) ≥ p(X = C
i
) ⇒ BJW(C
i
,C
j
) =
0
Again, the BJW-measure decomposes the
Kullback-Leibler distance D(p(X|Y = C
j
)kp(X)) in
two terms:
D(p(X|Y = C
j
)kp(X)) = BJW(C
i
,C
j
)+BJW(C
i
,C
j
)
The BJW-measure evaluates then the information
distribution between the predecessors (C
i
(k) orC
i
(k))
of an observation C
j
(k+ 1) at time t
k+1
.
The BJL-measure evaluates the information that
flows in two successor relations of a discrete memo-
ryless binary channel (i.e. from X(t
k
) = C
i
to Y(t
k+1
),
Figure 4) and the BJW-measure evaluates the infor-
mation that flows in two predecessor relations (i.e.
from X(t
k
) to Y(t
k+1
) = C
j
). Because (p(C
j
|C
i
) <
p(C
j
)) ⇔ p(C
i
|C
j
) < p(C
i
)), these two measures are
null at the same independence point. The information
flowing trough these four relations can then be com-
bined in a single measure called the BJM-measure.
Definition 5. The BJM-measure BJM(C
i
,C
j
) of a
binary relation R(C
i
,C
j
) is the norm of the vector
BJL(C
i
,C
j
)
BJW(C
i
,C
j
)
:
• (p(C
j
|C
i
) ≥ p(C
j
)) ∨ (p(C
i
|C
j
) ≥ p(C
i
)) ⇒
BJM(C
i
,C
j
) =
p
BJL(C
i
,C
j
)
2
+ BJW(C
i
,C
j
)
2
• (p(C
j
|C
i
) < p(C
j
)) ∨ (p(C
i
|C
j
) < p(C
i
)) ⇒
BJM(C
i
,C
j
) = −
q
BJL(C
i
,C
j
)
2
+ BJW(C
i
,C
j
)
2
The minus sign is used to build a monotonous
measure that distinguishes the position of a relation
R(C
i
,C
j
) around the independence point. The BJM-
measure BJM(C
i
,C
j
) of a relation R(C
i
,C
j
) is then
simply:
BJM(C
i
,C
j
) =
q
BJL(C
i
,C
j
)
2
+ BJW(C
i
,C
j
)
2
(5)
−
q
BJL(C
i
,C
j
)
2
+ BJW(C
i
,C
j
)
2
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
116

The maximum value BJM(C
i
,C
j
)
max
(obtained
when n
i, j
= min(n
i
, n j)) and the minimum value of
BJM(C
i
,C
j
)
min
(obtained when n
i, j
= 0) depend on
the ratio
θ
i, j
=
n
i
n
j
. The comparison of two BJM-
measures is not possible. To avoid this problem, the
BJM-measure BJM(C
i
,C
j
) is made linear with a M-
measure M(C
i
,C
j
) defined as follows:
Definition 6.
M(C
i
,C
j
) =
1
2
·
BJM(C
i
,C
j
)
BJM(C
i
,C
j
)
max
+
1
2
if p(C
j
|C
i
) > p(C
j
)
−
1
2
·
BJM(C
i
,C
j
)
BJM(C
i
,C
j
)
min
+
1
2
else
Whatever is the ratio
θ
i, j
, the M-measure M(C
i
,C
j
)
as the following properties:
• M(C
i
,C
j
) = 1 ⇔ BJM(C
i
,C
j
) = BJM(C
i
,C
j
)
max
(ideal crisscross)
• M(C
i
,C
j
) = 0, 5 ⇔ BJM(C
i
,C
j
) = 0 (C
i
and C
j
are independent)
• M(C
i
,C
j
) = 0 ⇔ BJM(C
i
,C
j
) = BJM(C
i
,C
j
)
min
(C
i
and C
j
are not linked)
For example, the values of the M-measure
of the set R = {R
1,H
(C
1
,C
H
, [
τ
−
1,H
,
τ
+
1,H
]),
R
0,L
(C
0
,C
L
, [
τ
−
0,L
,
τ
+
0,L
]), R
H,0
(C
H
,C
0
, [
τ
−
H,0
,
τ
+
H,0
]),
R
L,1
(C
L
,C
1
, [
τ
−
L,1
,
τ
+
L,1
])} of the illustrative example
are given in table 5. This table shows that all the
relations of R are ideally mixed.
Table 5: Matrix M.
C
1
C
0
C
H
C
L
C
1
0 0 1 0
C
0
0 0 0 1
C
H
0 1 0 0
C
L
1 0 0 0
3.5 Inducing Binary Relations
In this example, the relations
R
1,H
(C
1
,C
H
, [
τ
−
1,H
,
τ
+
1,H
]) and R
0,L
(C
0
,C
L
, [
τ
−
0,L
,
τ
+
0,L
])
have not the same meaning than the relations
R
H,0
(C
H
,C
0
, [
τ
−
H,0
,
τ
+
H,0
]) R
L,1
(C
L
,C
1
, [
τ
−
L,1
,
τ
+
L,1
]):
only the two first are linked with the system
y(t) = Fx(t), the two latter being only sequential
relation (i.e. the system computes the values of y(t),
not the values of x(t)).
To distinguish between these two kind of rela-
tions, the idea is to add noise in the initial set of
sequences. To this aim, we defined the ”noisy” ob-
servation class C
err
the occurrences of which are
Table 6: The M values evolution with different
λ
err
.
λ
err
R(C
1
,C
H
) R(C
H
,C
0
) R(C
0
,C
L
) R(C
L
,C
1
)
0 1 1 1 1
6 0.75 0.56 1 0.63
12 0.78 0 1 0
18 0.61 0 0.79 0
24 0.55 0 0.55 0
30 0 0 0 0
randomly timed. If a relation R
i, j
(C
i
,C
j
, [
τ
−
i, j
,
τ
+
i, j
])
is a property of the system, then the time interval
between the occurrences of the C
i
and C
j
classes
will be more regular than if this relation is a purely
sequential relation. The table 6 shows the val-
ues of the M-measures of the relations R(C
1
,C
H
),
R(C
H
,C
0
), R(C
0
,C
L
) and R(C
L
,C
1
) with different
rate
λ
err
=
n
err
t
24
− t
0
of noisy occurrences added in
Ω. For example, the sequence
ω
with
λ
err
= 18 is
the following:
ω
= {C
1
(1), C
H
(2), C
err
(3), C
0
(4),
C
err
(5), C
L
(6), C
err
(7), C
err
(8), C
err
(9), C
1
(10),
C
H
(11), C
0
(12), C
L
(13), C
1
(14), C
err
(15), C
H
(16),
C
err
(17), C
0
(18), C
L
(19), C
err
(20), C
1
(21), C
H
(22),
C
err
(23),C
0
(24),C
L
(25),C
err
(26),C
1
(27),C
err
(28),
C
H
(29), C
err
(30), C
0
(31), C
L
(32), C
err
(33), C
1
(34),
C
err
(35), C
H
(36), C
err
(37), C
err
(38), C
err
(39),
C
0
(40), C
L
(41), C
err
(42)}. The table 6 shows that
when
λ
err
∈ {12, 24}, the binary relations R(C
H
,C
0
)
and R(C
L
,C
1
) disappears. Naturally, when the noise
is too strong (
λ
err
= 30), all the relations disappear:
this means that at least one occurrence C
err
(k) is sys-
tematically inserted between two occurrences of the
initial sequence Ω.
This example leads also to an operational prop-
erty of the M-measure: when
θ
i, j
≫ 1 or
θ
i, j
≪ 1,
one class plays the same role of a noisy class for the
other. This situation arises in the two following cases:
• n
i, j
≥ n
i, j
⇒ p(C
j
|C
i
) ≥ 0.5. TheC
j
plays the role
of a noisy class for the class C
i
.
• n
i, j
≥ n
i, j
⇒ p(C
j
|C
i
) ≥ 0.5. TheC
i
plays the role
of a noisy class for the class C
j
.
These two conditions are both evaluated when com-
paring the product p(C
j
|C
i
) · p(C
i
|C
j
) with
1
2
·
1
2
:
when p(C
j
|C
i
) · p(C
i
|C
j
) ≤
1
4
, M(C
i
,C
j
) ≤ 0.5 and
the relation R
i, j
(C
i
,C
j
) can not be justified with the
M-measure. Inversely, when p(C
j
|C
i
)· p(C
i
|C
j
) >
1
4
,
M(C
i
,C
j
) > 0.5 and the relation R
i, j
(C
i
,C
j
) has some
interest from the point of view of the M-measure.
MINING TIMED SEQUENCES WITH TOM4L FRAMEWORK
117

This leads to the following simple inducing rule that
uses the M-measure as interestingness criteria:
M(C
i
,C
j
) > 0.5 ⇒ R
i, j
(C
i
,C
j
) ∈ I (6)
3.6 Deduction of N-ary Relations
The set I of binary relations contains then the minimal
subset of R where each relation R
i, j
(C
i
,C
j
) presents a
potential interest. From this set, the M-measure can
be used to build n-ary relations having some poten-
tial to be observed in the initial set Ω of sequences.
To this aim, the M-measure is used in an heuristic
h(m
i,n
) that guides an abductive reasoning to build
a minimal set M = {m
k,n
} of n-ary relations of the
form m
k,n
= {R
i,i+1
(C
i
,C
i+1
)}, i = k, ··· , n − 1, that
is to say paths leading to a particular final observation
class C
n
. The heuristic h(m
i,n
) makes a compromise
between the generality and the quality of a path m
i,n
:
h(m
i,n
) = card(m
i,n
) × BJL(m
i,n
) × P(m
i,n
) (7)
In this equation, card(m
i,n
) is the number of relations
in m
i,n
, BJL(m
i,n
) is the sum of the BJL-measures
BJL(C
k−1
,C
k
) of each relation R
k−1,k
(C
k−1
,C
k
) in
m
i,n
and P(m
i,n
) is the product of the probabilities as-
sociated with each relation in m
i,n
:
• BJL(m
i,n
) =
∑
k=card(m
i,n
),···,1
BJL
R(C
k−1
,C
k
)
• P(m
i,n
) =
∏
i=card(m
i,n
),···,1
p(C
k
|C
k−1
)
P(m
i,n
) corresponds to the Chapmann-
Kolmogorov probability of a path in the transition
matrix P = [p(k − 1, k)] of the Stochastic Represen-
tation. The interestingness heuristic h(m
i,n
) being
of the form
φ
· ln(
φ
), it can be used to build all the
paths m
i,n
where h(m
i,n
) is maximum (Benayadi and
Le Goc, 2008). For the illustrative example, the
deduction step found a set M of two binary relations
(M = I)
1
.
3.7 Find Representativeness N-ary
Relations
Given a set M = {m
k,n
)} of paths m
k,n
=
{R
i,i+1
(C
i
,C
i+1
)}, i = k, ··· , n − 1, the TOM4L
process uses two representativeness criterion to build
the subset S ⊆ M containing the only paths m
k,n
being representative according the initial set Ω of
sequences. These criterion are a timed version of
support and confidence notions:
Definition 7. Anticipation Rate.
The anticipation rate Ta(m
i,n
) of a n-ary relation m
i,n
1
No paths containing more than one binary relation can
be deduced from I.
is the ratio between the number of instances of m
i,n
in
Ω with the number of occurrences of the m
i,n−1
(i.e.
the n-ary relation m
i,n
without the last binary relation
R
n−1,n
(C
n−1
,C
n
)).
Definition 8. Cover Rate.
The cover rate Tc(m
i,n
) of a n-ary relation m
i,n
is the
ratio between the number of occurrences of m
i,n
with
the number of occurrences of the final class C
n
of the
n-ary relation m
i,n
.
The anticipation rate Ta(m
i,n
) and the cover rate
Tc(m
i,n
) are criterion that allow to define an interest-
ingness criteria to find interesting n-ary relations m
i,n
that are called ”Signatures”:
Definition 9. Signature.
An n-ary relation m
i,n
is a signature if and only if
Tc(m
i,n
) ≥ C and Ta(m
i,n
) ≥ A, where C ∈ [0, 1] ⊂ ℜ
and A ∈ [0, 1] ⊂ ℜ.
Given a set of sequences (typically Ω) and the
values of A and C, the ”BJT4S” algorithm computes
all the anticipation rate Ta(m
i,n
) and the cover rate
Tc(m
i,n
) of each sub-paths m
k,n
, k ≥ i, of each paths
m
i,n
of M to build the set S of signatures that sat-
isfy the conditions Tc(m
k,n
) ≥ C and Ta(m
k,n
) ≥ A.
To this aim, the ”BJT4S” algorithm represents the
sub-paths m
k,n
in DEVS models and uses an abstract
chronicle recognition engine to compute the corre-
sponding anticipation rate Ta(m
k,n
) and the cover rate
Tc(m
k,n
) (Le Goc et al., 2006). The complexity of
this algorithm is proportional with the number of sub-
paths and the size of the sequence so the smallest the
set M = {m
k,n
)} is (i.e. the most efficient the inter-
estingness heuristic h(m
i,n
) is) , the faster the exe-
cution of the BJT4S algorithm is. For example, the
values of the cover rate and the anticipation rate of
both binary relations of M of the illustrative example
are 100%. So, S = M, S = {R
1,H
(C
1
,C
H
, [
τ
−
1,H
,
τ
+
1,H
]),
R
0,L
(C
0
,C
L
, [
τ
−
0,L
,
τ
+
0,L
])}. These signatures are the only
relations (patterns) that are linked with the system
y(t) = Fx(t). Comparing with the set of patterns
found by Apriori-like approaches, we can confirm
from this illustrative example that TOM4L approach
converges towards a minimal set of operational re-
lations, which describe the dynamic of the process.
In the next section, we present the application of
TOM4L on a sequence generated by a very complex
dynamic process, blast furnace process. Due to the
process complexity, we can confirm, without expe-
rience, that Apriori-like approaches fail to mine this
sequence.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
118
4 APPLICATION
Sachem is the name of the very large scale
knowledge-based system the Arcelor-Mittal Steel
group has developed at the end the 20th century to
help the operators to monitor, diagnose and control
the blast furnace, a very complex production process
(Le Goc, 2006).
With a Sachem system, the blast furnace behav-
ior is described with a series of occurrences of phe-
nomenon classes that corresponds to the observation
classes of TOM4L. The application is concerned with
the omega variable that reveals the management qual-
ity of the whole blast furnace. The omega is a very ab-
stract variable corresponding to the ratio of the num-
ber of carbon atoms used to produce a ton of hot
metal with the number of iron (f
e
) atoms it contains
(the studied blast furnace produces 6,000 tons of hot
metal per day). The values of omega are provided
by a mathematical model which is a set of 17 differ-
ential equations linking together 53 high level vari-
ables synthesizing the whole the blast furnace behav-
ior. This model is used to compute the ideal value
of omega corresponding to a perfectly adjusted blast
furnace: any distance from this ideal value means
that the blast furnace is not well managed. In a set
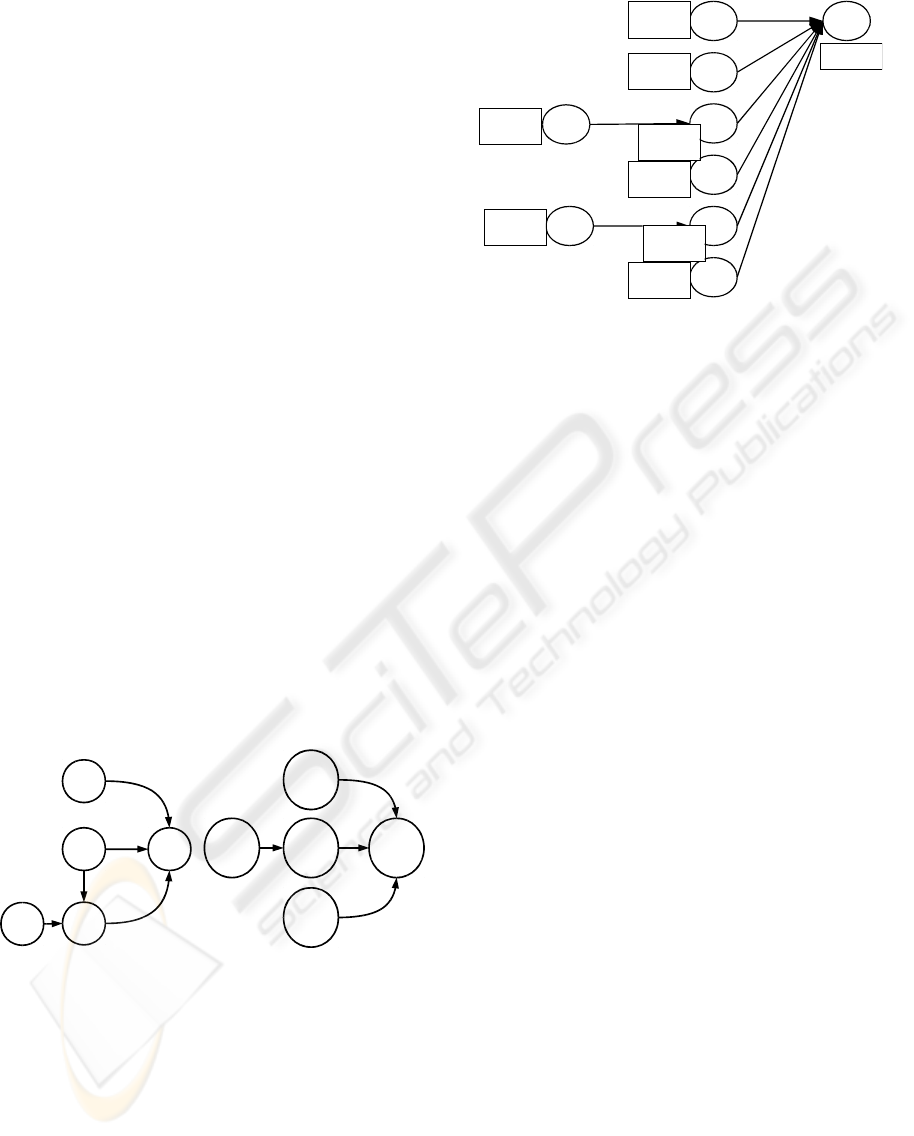
of expertise documents of 1995, the experts defines
the variable modifications that cause the main mod-
ifications of omega (Figure 5, a): the top gas speed
(TGS), the flame temperature (TF), the burden per-
meability (BD) and the size of the sinter (SS) through
the burden permeability. The studied sequence comes
Omega
1463, 1464
1465, 1467
TGS
1454, 1454
T°F
1217, 1216
SS
1717, 1718
1719, 1719
1720,1721
BD
1256,1257,1258
1259,1260,1262
1267,1269,1271
Omega
TGS
T°F
BD
SS
Figure 5: Expert’s (1995, a) and discovered relations (2009,
b).
from a blast furnace of Fos-Sur-Mer (France) from
08/01/2001 to 31/12/2001. It contains 7682 occur-
rences of 45 classes. For the 1463 class linked to
the omega variable, the search space contains about
20
5
= 3, 200, 000 binary relations. The inductive and
the abductive reasoning steps of TOM4L produces
a minimal set M of only 166 binary relations from
which the set S of signatures of figure 6 have been
discovered (Ta = 50% and Tc = 10%). The set S is
made with 50 binary relations.
14631454
1467
1217
[0,35h51m6s]
[0,142h15m22s
]
[0,57h6m248s]
1717
1464
[0,132h25m30s]
1267
[0,82h2m20s]
1718
[0,92h0m0s]
1465
[0,47h40m50s]
[0,110h24m0s]
Tc= 74 %
Ta=62 %
Tc=67%
Ta=164 %
Tc=14 %
Ta=62 %
Tc=19 %
Ta=328%
Tc= 22 %
Ta=100 %
Tc=29 %
Ta=156 %
Tc=53%
Ta=58 %
Tc= 71 %
Ta=138 %
Tc=98%
Figure 6: 1463 class signatures.
When substituting a class with its associated vari-
able (the omega variable with the class 1464 for ex-
ample) and the signatures of Figure 6 becomes the
graph (b) of Figure 5 that contains the graph of the
Expert’s in 1995. The only difference is the direction
of the relation between the variables TF and BD. This
result shows that when pruning the branches bring-
ing few information from a class to another, the BJ-
measure allows to consider only the branches with a
strong potentiality to be a signature: every signature
Figure 6 have a strong credibility according to the
laws governing the blast furnace. It is to note that the
same result is observed on the Apache system, a clone
of Sachem design to monitor and diagnose a galva-
nization bathe. As with the simple illustrative exam-
ple of this paper, this result shows that the TOM4L
process converges through a minimal set of binary
relations with the elimination of the non interesting
relations, despite of the complexity of the monitored
process.
5 CONCLUSIONS
This paper presents the basis of the TOM4L process
for discovering temporal knowledge from timed mes-
sages generated by monitored dynamic process. The
TOM4L process is based on four steps: (1) a stochas-
tic representation of a given set of sequences from
which is induced (2) a minimal set of timed binary
relations, and an abductive reasoning (3) is then used
to build a minimal set of n-ary relations that is used to
find (4) the most representativen-ary relations accord-
ing to the given set of sequences. The induction and
the abductive reasoning are based on an interesting-
ness measure of the timed binary relations, that allows
eliminating the relations having no meaning accord-
ing to the given set of sequences. The results obtained
MINING TIMED SEQUENCES WITH TOM4L FRAMEWORK
119

with an application on a very complex real world pro-
cess (a blast furnace) are presented to show the opera-
tional character of the TOM4L process. These results
provide new insights about the blast furnace behavior.
So our current works are now focusing on the defini-
tion of a verity principle that is required to qualified
the discovered relations.
REFERENCES
Agrawal, R. and Psaila, G. (1995). Active data mining.
In Fayyad, Usama, M. and Uthurusamy, R., editors,
First International Conference on Knowledge Discov-
ery and Data Mining (KDD-95), pages 3–8, Montreal,
Quebec, Canada. AAAI Press, Menlo Park, CA, USA.
Ayres, J., Flannick, J., Gehrke, J., and Yiu, T. (2002). Se-
quential pattern mining using a bitmap representation.
KDD02: Proceedings of the eighth ACM SIGKDD in-
ternational conference on Knowledge discovery and
data mining, pages 429–435.
Benayadi, N. and Le Goc, M. (2008). Using a measure
of the crisscross of series of timed observations to
discover timed knowledge. Proceedings of the 19th
International Workshop on Principles of Diagnosis
(DX’08).
Blachman, N. M. (1968). The amount of information that
y gives about x. IEEE Transcations on Information
Theory IT, 14.
Bouch´e, P. (2005). Une approche stochastique de
mod´elisation de s´equences d’´ev´enements discrets
pour le diagnostic des syst`emes dynamiques. Th`ese,
Facult´e des Sciences et Techniques de Saint J´erˆome.
Cover, T. M. and Thomas, J. A. (August 12. 1991). Ele-
ments of Information Theory. Wiley-Interscience.
Dousson, C. and Duong, T. V. (1999). Discovering chron-
icles with numerical time constraints from alarm logs
for monitoring dynamic systems. In IJCAI : Proceed-
ings of the 16th international joint conference on Ar-
tifical intelligence, pages 620–626.
Han, J. and Kamber, M. (2006). Data Mining: Concepts
and Techniques. Morgan Kaufmann.
Le Goc, M. (2006). Notion d’observation pour le diagnostic
des processus dynamiques: Application `a Sachem et `a
la d´ecouverte de connaissances temporelles. HDR,
Facult´e des Sciences et Techniques de Saint J´erˆome.
Le Goc, M., Bouch´e, P., and Giambiasi, N. (2006). Devs, a
formalism to operationnalize chronicle models in the
elp laboratory, usa. In DEVS’06, DEVS Integrative
M&S Symposium, pages 143–150.
Mannila, H. (2002). Local and global methods in data min-
ing: Basic techniques and open problems. 29th In-
ternational Colloquium on Automata, Languages and
Programming.
Mannila, H. and Toivonen, H. (1996). Discovering general-
ized episodes using minimal occurrences. In Knowl-
edge Discovery and Data Mining, pages 146–151.
Mannila, H., Toivonen, H., and Verkamo, A. I. (1995). Dis-
covering frequent episodes in sequences. In Fayyad,
U. M. and Uthurusamy, R., editors, Proceedings of the
First International Conference on Knowledge Discov-
ery and Data Mining (KDD-95), Montreal, Canada.
AAAI Press.
Roddick, F. and Spiliopoulou, M. (2002). A survey of tem-
poral knowledge discovery paradigms and methods.
IEEE Transactions on Knowledge and Data Engineer-
ing, 14(4):750–767.
Shannon, C. E. (1949). Communication in the presence of
noise. Institute of Radio Engineers, 37.
Smyth, P. and Goodman, R. M. (1992). An information
theoretic approach to rule induction from databases.
IEEE Transactions on Knowledge and Data Engineer-
ing 4, pages 301–316.
Vilalta, R. and Ma, S. (2002). Predicting rare events in
temporal domains. In ICDM02: Proceedings of the
2002 IEEE International Conference on Data Mining
(ICDM02), page 474. IEEE Computer Society.
Weiss, G. M. and Hirsh, H. (1998). Learning to predict rare
events in categorical time-series data. In Proceedings
of the Fourth International Conference on Knowledge
Discovery and Data Mining, AAAI Press, Menlo Park,
CA.
Zaki, M. J. (2001). Spade: An efficient algorithm for min-
ing frequent sequences. Machine Learning, 42:31–60.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
120
