
A CONSTRAINED FINITE TIME OPTIMAL CONTROLLER FOR
THE DIVING AND STEERING PROBLEM OF AN AUTONOMOUS
UNDERWATER VEHICLE
George Nikolakopoulos, Nikolaos J. Roussos
Hellenic Navy Research Center (GETEN), Ministry of Defence, Papagos, Athens, Attika, Greece
Kostas Alexis
Department of Electrical and Computer Engineering, University of Patras, Rio Achaias, Greece
Keywords:
AUV, Constrained finite time, Optimal control.
Abstract:
In this paper a Constrained Finite Time Optimal Controller (CFTOC) is designed and applied to the diving and
steering problem of an Autonomous Underwater Vehicle. The non–linear model of the AUV is presented and
the decoupled linear models for the steering and diving motions of the vehicle are derived, based on certain
modeling assumptions and simplifications, while the cruising speed of the vehicle is considered to be small
and constant. The proposed control scheme has the merit to take under consideration: a) the mechanical and
physical constrains of the AUV, b) uncertainties produced from modeling errors and environmental noise, c)
constrains in the motors, and produce an optimal controller for the vehicle that will guarantee the stability of
the closed loop system. Theproposed CFTO–controller is applied to simulation studies and relevant simulation
results are presented that prove the efficacy of the proposed scheme.
1 INTRODUCTION
In the last years there was a strong interest towards
the development of Autonomous Underwater Vehi-
cles (AUV) and Remotely Operated Vehicles (ROV).
These classes of underwater vehicles are intended to
provide simple, long–range, low–cost measurements
of environmental data or surveillance studies. Al-
though ROVs have been utilized in the past in many
applications, in the recent years there has been a
growing demand for the utilization of AUVs as these
vehicles are superior to the ROVs, are completely au-
tonomous and are not suffering from the demand of
high operating costs, dedicated cables for carrying the
data links between the vessel and the ROV and expe-
rienced crew to guide the vehicle (Yuh, 2000; E. An,
2001; Foresti, 2001).
The superiority of AUVs and their complete au-
tonomy are generating more demands for modeling
approaches and applied control algorithms as more
accurate and fast control actions should be applied to
the vehicle to improve the overall performance. In
the utilized model of an AUV, when other factors are
taken under consideration, including: a) parametric
uncertainties such as added mass, hydrodynamic co-
efficients, lift and drag forces, b) highly and coupled
non linearities, and c) environmentaldisturbances like
ocean currents and wave effects, the problem of ap-
plying a most suitable control law is widely increased.
In the area of mathematical modeling for AUVs,
there have been extended analytical approaches with
the main variation being the level of association be-
tween the hydrodynamic phenomena and the under-
water rigid body dynamics. In the general case the
mathematical models contain hydrodynamic forces
and moments expressed in terms of a set of hydro-
dynamic coefficients, therefore it is of paramount im-
portance to a priori know the true values of these
coefficients to control the AUV accurately. In most
of the cases experimental measurements are needed
to tune the hydrodynamic parameters of the models
while the relative literature is providing sufficient ref-
erences and methodologies for calculating these pa-
rameters in various types of underwater vehicles.
In the area of controlling AUVs, until now various
classical approaches have been utilized. More specif-
ically many control strategies have been appeared in
260
Nikolakopoulos G., J. Roussos N. and Alexis K. (2010).
A CONSTRAINED FINITE TIME OPTIMAL CONTROLLER FOR THE DIVING AND STEERING PROBLEM OF AN AUTONOMOUS UNDERWATER
VEHICLE.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 260-267
DOI: 10.5220/0002948202600267
Copyright
c
SciTePress
the literature for the diving and steering control of an
AUV such as: Optimal control (Field, 2000), Neu-
ral Networks (Kawano and Ura, 2002), Fuzzy con-
trol (Debitetto, 1995), Adaptive Sliding Mode con-
trol (Cristi et al., 1990), Proportional and Derivative
(PD) control (Bjorn, 1994; Pestero, 2001), Sliding
Modes Control (SMC) (Healey and Lienard, 1993;
Rodrigues et al., 1996) and Linear Quadratic Gaus-
sian (LQG) controller (Fossen, 1994b). In all these
approaches, in the first stage of the controller design,
decoupling can be applied to the movements of the
AUV and each movement can be modeled and con-
trolled by a different set of differential equations and
different controllers.
In the current research effort the aim is to utilize
a more accurate and realistic modeling approach for a
torpedo like AUV, the REMUS AUV, and based on the
derived decoupled model of the vehicle’s motions to
design a novel constrained finite time optimal control
scheme for the diving and steering motions. The pro-
posed control scheme has the advantage of taking un-
der consideration in the design phase: a) the physical
and mechanical constrains, b) the disturbances from
the environmental noise, and c) the additive uncer-
tainty on the system transfer function due to modeling
errors and non–linearities. In spite of the complexity
of the control design stage (off–line), the on–line con-
troller implementation results in an exhaustive search
in a multidimensional look–up table, depending on
the number of the system’s states and control inputs,
that can be easily implemented in an on board micro–
controller .
This article is structured as follows. In Section 2
the utilized modeling approach for the AUV is pre-
sented, while the design of the proposed CFTO–
control scheme is presented in Section 3. The validity
of the proposed scheme is provided in Section 4 by
simulation results, resulting from the application of
the proposed scheme to the diving and steering mo-
tions of the AUV. Finally the conclusions are drawn
in Section 5.
2 AUV MODELING
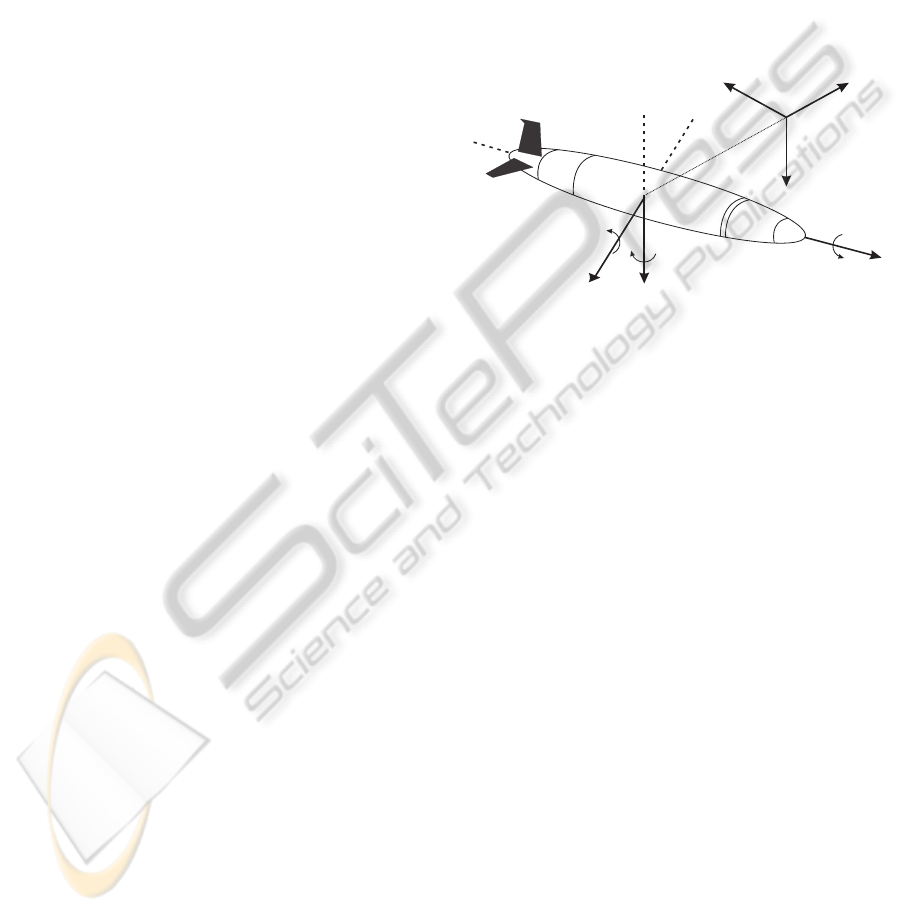
The AUV under study is a torpedo like underwater
vehicle and it is illustrated in Figure 1 with the rele-
vant body–fixed and inertial coordinate systems. The
modeling of the equations of motion will be derived
by the utilization of a relative standard framework
that has been established in (Gertler and Hagen,
1967) and revised in (Humphreys, 1976) and (Feld-
man, 1979) with the assumptions: 1) the vehicle is
deeply submerged in a homogeneous and unbounded
liquid, 2) the vehicle does not experience memory
effects, 3) the simulator neglects the effects of the
vehicle passing through its own wake, and 4) the
vehicle does not experience underwater currents. In
addition, the following assumptions for the vehicle’s
dynamics are also necessary: 1) the vehicle is a rigid
body of constant mass, 2) the control fins do not stall
regardless of angle of attack, and 3) the propulsion
model treats the vehicle propeller as a source of
constant thrust and torque. The vehicle equations
Sway
Pitch
v
q
Heave
Yaw
w
r
Surge
Roll
u
p
y θ,
z, ψ
x, φ
Body-Fixed
Coordinates
Earth-Fixed
Coordinates
Figure 1: Body Fixed and Inertial Coordinate System of the
AUV.
of motion in Figure 1, consist of the kinematics,
rigid-body and mechanic terms (Fossen, 1994a) and
by combining the equations for the vehicle rigid–
body dynamics with the equations for the forces and
the moments of the vehicle, we can conclude in the
following non–linear set of equations in a general
framework of six degrees of freedom plane. These
equations follow the SNAME convention (SNAME,
1950) for the assignment of the body–fixed vehicle
coordinate system and are presented in the above for
retaining clarity.
Eq.1 - Surge:
(m− X
˙u
) ˙u+mz
g
˙q− my
g
˙r = X
HS
+ X
u|u|
u|u| + (X
ωq
− m)ωq
+(X
qq
+ mx
g
)q
2
+ (X
υr
+ m)υr +(X
rr
+ mx
g
)r
2
−my
g
pq− mz
g
pr+ X prop (1)
Eq.2 - Sway:
(m−Y
˙
υ
)
˙
υ+ mz
g
˙p− (mx
g
−Y
˙r
)˙r = Y
HS
+Y
υ|υ|
υ|υ|+Y
r|r|
r|r|
my
g
r
2
+ (Y
ur
− m)ur + (Y
ωp
+ m)ωp+ (Y
pq
− mx
g
)pq
+Y
uυ
uυ+ my
g
p
2
+ mz
g
qr+Y
uuδ
r
u
2
δ
r
(2)
Eq.3 - Heave:
(m− Z
˙
ω
)
˙
ω+ my
g
˙p− (mx
g
+ Z
˙q
) ˙q = Z
HS
+ Z
ω|ω|
ω|ω|
+Z
q|q|
q|q| + (Z
uq
+ m)uq + (Z
υp
− m)υp+ (Z
rp
− mx
g
)rp
+Z
uω
uω+ mz
g
(p
2
+ q
2
) − my
g
rq+ Z
uuδ
s
u
2
δ
s
(3)
A CONSTRAINED FINITE TIME OPTIMAL CONTROLLER FOR THE DIVING AND STEERING PROBLEM OF AN
AUTONOMOUS UNDERWATER VEHICLE
261

Eq.4 - Roll:
−mz
g
˙
υ+ my
g
˙
ω+ (I
xx
− K
˙p
) ˙p = K
HS
+ K
p|p|
p|p|
−(I
zz
− I
yy
)qr + m(uq− υp) − mz
g
(ωp− ur) + K
prop
(4)
Eq.5 - Pitch:
mz
g
˙u− (mx
g
+ M
˙
ω
)
˙
ω+ (I
yy
− M
˙q
) ˙q = M
HS
+ M
ω|ω|
ω|ω|
+M
q|q|
q|q| + (M
uq
− mx
g
)uq+ (M
υp
+ mx
g
)υp
+[M
rp
− (I
xx
− I
zz
)]rp+ mz
g
(υr− ωq) + M
uω
uω+ M
uuδ
s
u
2
δ
s
(5)
Eq.6 - Yaw:
−my
g
˙u+ (mx
g
+ N
˙
υ
)
˙
υ+ (I
zz
− N
˙r
)˙r = N
HS
+ N
υ|υ|
υ|υ|
+N
r|r|
r|r| + (N
ur
− mx
g
)ur + (N
ωp
+ mx
g
)ωp
+[N
pq
− (I
yy
− I
xx
)]pq − my
g
(υr− ωq) + N
uυ
uυ+ N
uuδ
r
u
2
δ
r
(6)
In these equations, the vehicle’s cross products of
inertia I
xy
, I
xz
, I
yz
were assumed to be small and ne-
glected. Moreover, zero value coefficients have not
been included in the current formulation.
2.1 Diving Plane Motion
For deriving the equations of the diving plane motion,
we should take under consideration only the body–
relative surge velocity u, heave velocity ω, the pitch
rate q, the earth–relative vehicle forward position x,
the diving z, and the pitch angle θ. Before linearizing
these equations in (1-6) we will integrate the terms
for the hydrostatics, the axial and crossbow drag, the
added mass, the body and fin lift and finally the mo-
ments. By assuming that the other velocities (υ, p,
r) are negligible, we can result in the following lin-
earized relationships between the body and earth fixed
vehicle velocities (Prestero, 2001):
(m− X
˙u
) ˙u+ mz
g
˙q− X
u
u− X
q
q− X
θ
θ = 0
(m− Z
˙
ω
)
˙
ω− (mx
g
+ Z
˙q
) ˙q− Z
ω
ω− (mU + Z
q
)q = Z
δ
s
δs
mz
g
˙u− (mx
g
+ M
˙
ω
)
˙
ω+ (I
yy
− M
˙q
) ˙q− M
ω
ω+
(mx
g
U − M
q
)q− M
θ
θ = M
δ
s
δ
s
(7)
where at this point and for clarity in our presentation,
the nomenclature that is ruling equations (1-7) is pre-
sented in Table 1.
If we assume that z
g
is small compared to the other
terms, we can decouple heave and pitch from surge,
which results in the following set of equations:
(m− Z
˙
ω
)
˙
ω− (mx
g
+ Z
˙q
) ˙q− Z
ω
ω− (mU + Z
q
)q = Z
δ
s
δs (8)
−(mx
g
+ M
˙
ω
)
˙
ω+ (I
yy
− M
˙q
) ˙q− M
ω
ω+
(mx
g
U − M
q
)q− M
θ
θ = M
δ
s
δ
s
(9)
and based on the mentioned assumptions the vehicle’s
kinematic equations of motion are formulated as (Tri-
antafyllou and Franz, 2003):
Table 1: Utilized parameters and their values in the lin-
earized description of AUV’s diving motion.
Par. Name Par. Name
x
g
Center of gravity z
g
Center of gravity
M
θ
Hydrostatic m AUV’s mass
X
u
Axial drag X
˙u
Added mass
X
q
Added mass I
yy
Moment of inertia
Z
˙q
Heave velocity U Steady velocity
Z
ω
Combined term Z
˙
ω
Added mass
Z
q
Combined term Z
˙q
Added mass
M
ω
Combined term M
˙
ω
Added mass
M
q
Combined term M
˙q
Added mass
X
θ
Hydrostatic
˙x = cos(θ)u+ sin(θ)ω (10)
˙z = −sin(θ)u+ cos(θ)ω (11)
˙
θ = q (12)
For the linearization of equations in (10-12) it is
assumed that the vehicle motion consists of small per-
turbationsaround a steady point. In this case,U repre-
sents the steady–state forward velocity of the vehicle.
If heave and pitch are linearized about zero, we have
u = U + u
′
, ω = ω
′
and q = q
′
. By utilizing: a) the
equations in (10–12), b) the Maclaurin expansion of
the trigonometric terms, c) dropping the higher order
terms, and d) with the above assumption for the de-
coupling of heave and pitch from surge, the following
linearized kinematic equations of motion are derived:
˙z = ω−Uθ (13)
˙
θ = q (14)
The combination of equations (8) and (9) with
those in equations (13) and (14) results in the follow-
ing matrix form for the description of the diving plane
motion of the AUV:
m− X
˙u
−(mx
g
+ Z
˙q
) 0 0
−(mx
g
+ M
˙
ω
) I
yy
− M
˙q
0 0
0 0 1 0
0 0 0 1
˙
ω
˙q
˙z
˙
θ
−
Z
ω
mU +Z
q
0 0
M
ω
−mx
g
U + M
q
0 M
θ
1 0 0 −U
0 1 0 0
ω
q
z
θ
=
Z
δ
s
M
δ
s
0
0
[δ
s
] (15)
Assuming that the heave velocities are small com-
pared to the other terms, and that the center of gravity
is equal to the buoyancy center (x
g
= 0), the equations
in (15) are simplified to the following:
I
yy
− M
˙q
0 0
0 1 0
0 0 1
˙q
˙z
˙
θ
+
−M
q
0 −M
θ
0 0 U
−1 0 0
q
z
θ
=
M
δ
s
0
0
[δ
s
] (16)
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
262

and finally for the state space description of the lin-
earized system, it is derived that:
˙q
˙z
˙
θ
=
M
q
I
yy
−M
˙q
0
M
θ
I
yy
−M
˙q
0 0 −U
1 0 0
q
z
θ
+
M
δ
s
I
yy
−M
˙q
0
0
[δ
s
] (17)
Given the state vector x
1
= [q z θ]
′
∈ ℜ
3
and the input
u
con
1
= δ
s
∈ ℜ we can write the matrix form in (17) as:
˙x
1
= A
div
x
1
+ B
div
u
con
1
(18)
y
1
= C
div
x
1
(19)
with A
div
=
M
q
I
yy
−M
˙q
0
M
θ
I
yy
−M
˙q
0 0 −U
1 0 0
, B
div
=
M
δ
s
I
yy
−M
˙q
0
0
and
C
div
= [1 0 0].
2.2 Steering Plane Motion
As it was presented in Section 2.2, the diving subsys-
tem controls depth and pitch errors while the steer-
ing subsystem controls heading errors. In the pre-
sented approach it is assumed that the upper–bow rud-
der and the lower–bow rudder, as also the upper–stern
and the lower–stern rudder of the AUV, are of iden-
tical size and shape and are receiving the deflection
command equally, at the same time instant, but in an
opposite direction. Moreover the following assump-
tions are made: 1) the center of mass of the vehicle
lies below the origin (z
G
is positive), 2) x
G
and y
G
are
zero, 3) the vehicle is symmetric in its inertial proper-
ties, 4) the motions in the vertical plane are negligible
([w
r
, p, q, r, Z, φ, θ] = 0), and 5) u
r
equals the forward
speed, U. Based on these assumptions and on the cal-
culation of the hydrodynamic coefficients in (Fodrea,
2002), equations (1–6) are simplified to the following
linearized equations:
m
˙
υ = −mUr+Y
˙
υ
˙
υ+Y
υ
υ+Y
˙r
˙r+Y
r
r+Y
δ
s
δ
r
(20)
I
zz
˙r = N
˙
υ
˙
υ+N
υ
υ+ N
˙r
˙r+N
r
r+ N
δ
s
δ
r
(21)
˙
ψ = r (22)
where the nomenclature that is ruling the above
set of equations is presented in Table 2.
Equations (20–21) in a matrix form could be writ-
ten as:
m−Y
˙
υ
−Y
˙r
0
−N
˙
υ
I
zz
− N
˙r
0
0 0 1
˙
υ
˙r
˙
ψ
=
Y
υ
Y
r
− mU 0
N
υ
N
r
0
0 1 0
υ
r
ψ
+
Y
δ
s
N
δ
s
0
[δ
r
] (23)
For the steering subsystem there are three state
variables: r, ψ, ad υ. The r variable is the yaw rate of
turn, ψ variable represents the heading angle, while υ
Table 2: Utilized parameters and their values in the lin-
earized description of AUV’s Steering motion.
Par. Name
Y
˙
υ
Added mass is sway
Y
˙r
Added mass in yaw
Y
υ
Sway force induced by side slip
Y
r
Sway force induced by yaw
N
˙
υ
Added mass in sway
N
˙r
Added mass in yaw
N
υ
Sway moment from side slip
N
r
Sway moment from yaw
Y
δ
s
Linearized rudder action force
N
δ
s
Linearized rudder action force
represents the sway velocity. Based on the assump-
tion made for the vehicle dynamics is that the cross
coupling terms in the mass matrix are zero due to the
assumed symmetry in the rudders, equation (23) can
be given as:
m−Y
˙
υ
0 0
0 I
zz
− N
˙r
0
0 0 1
˙
υ
˙r
˙
ψ
=
Y
υ
Y
r
− mU 0
N
υ
N
r
0
0 1 0
υ
r
ψ
+
Y
δ
s
N
δ
s
0
[δ
r
] (24)
where δ
r
is the control signal applied to both rudders.
The state space description of the linearized system
will be:
˙
υ
˙r
˙
ψ
=
Y
υ
m−Y
˙
υ
Y
r
−mU
m−Y
˙
υ
0
N
υ
I
zz
−N
˙r
N
r
I
zz
−N
˙r
0
0 1 0
υ
r
ψ
+
Y
δ
s
m−Y
˙
υ
N
δ
s
I
zz
−N
˙r
0
[δ
r
] (25)
Given the state vector x
2
= [υ r ψ]
′
∈ ℜ
3
and the
input u
con
2
= δ
r
∈ ℜ, the matrix form in Eq. (25) can
be written as:
˙x
2
= A
steer
x
2
+ B
steer
u
con
2
(26)
y
2
= C
steer
x
2
(27)
where
A
steer
=
Y
υ
m−Y
˙
υ
Y
r
−mU
m−Y
˙
υ
0
N
υ
I
zz
−N
˙r
N
r
I
zz
−N
˙r
0
0 1 0
, B
steer
=
Y
δ
s
m−Y
˙
υ
N
δ
s
I
zz
−N
˙r
0
and
C
steer
=
h
1 0 0
i
.
3 CONSTRAINED FINITE TIME
OPTIMAL CONTROLLER
SYNTHESIS
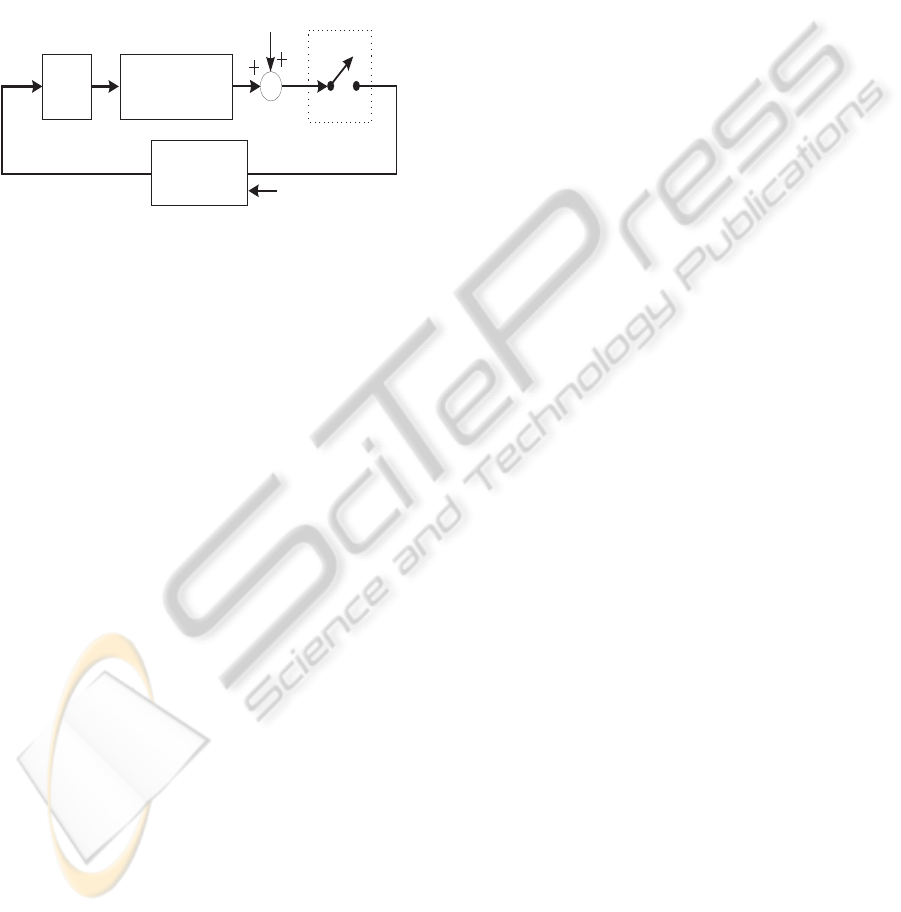
In the proposed control strategy, the aim is to design
a CFTOC–scheme for the decoupled diving and steer-
ing motion of the AUV as it is presented in Figure 2.
At this point it should be mentioned that the speed
A CONSTRAINED FINITE TIME OPTIMAL CONTROLLER FOR THE DIVING AND STEERING PROBLEM OF AN
AUTONOMOUS UNDERWATER VEHICLE
263
u ∈ ℜ of the AUV was considered to be constant and
no control action has been considered for this mo-
tion while the control actions are applied to the lin-
ear model of the AUV after the ZOH. Prior to the de-
sign of the control algorithm, it is necessary to model
and take under consideration in the controller’s syn-
thesis, the mechanical constrains of the utilized AUV,
the disturbances that are introduced from the onboard
sensors, the additive uncertainties due to modeling er-
rors and the non–linearities.
AUV
Model
Σ
W
CFTO
Controller
ZOH
Sampler
Σ
Reference
Figure 2: The Proposed Control Scheme for the AUV’s
Depth and Steering Motions
The derived linearized decoupled models in equa-
tions (18-19) and (26-27) are valid only for small val-
ues of pitch, yaw and fin angles around the lineariza-
tion points. Moreover, the control actions u
con
1
, u
con
2
should also be bounded due to physical constraints
applied to the motors. We consider the state vec-
tor X = [x
1
, x
2
]
T
∈ ℜ
6
and the control vector U =
[u
con
1
, u
con
1
]
T
∈ ℜ
2
.
Let the matrix H
i
be a zeroed 2 × 8 matrix except
for its i–th column, which is equal to [1, −1]
T
and
with i ∈ [1, 2, ·· · , 16], i.e.:
H
i
=
0 ... 0 1 0 ... 0
0 ... 0 −1 0 ... 0
(28)
The bounds can be cast in a more compact form as:
H
1
.
.
.
H
12
−−
H
13
.
.
.
H
16
16×8
·
X
−−
U
8×1
≤
X
max
1
X
min
1
.
.
.
X
max
6
X
min
6
−−
U
max
1
U
min
1
U
max
2
U
min
2
16×1
(29)
where the notation X
i
corresponds to the ith element
of the vector X .
Due to factors such as noise, accuracy of measure-
ments and round–off errors, the onboard measure-
ments are not ideal. These inaccuracies in the mea-
surements, in the presented approach are considered
as additive disturbances to the system models. More-
over we will consider uncertainty in the state space
matrices, due to the existence of modelling simplifi-
cations and errors. If we consider a sampling time
T
s
∈ ℜ
+
, the combined discrete time version of equa-
tions (18-19) and (26-27) with the effects of the ad-
ditive noise, can be cast as piecewise affine (PWA)
system:
˙
X =
"
A
∗,i
div
0
3×3
0
3×3
A
∗,i
steer
#
X +
h
B
∗,i
div
B
∗,i
steer
i
U +W (30)
with the constraints in (29). The notation (·)
∗
repre-
sents the discrete time value of the corresponding ma-
trix, while W ∈ ℜ
8
is an additive and of a zero mean
white noise, bounded by the set W ⊆ ℜ
6
. Moreover
j ∈ S , with S , {1, 2, · · · , s}, is a finite set of indexes
and s ∈ Z
+
denotes the number of affine sub–systems
in (30). For polytopic uncertainty, Ω is the polytope
defined as:
Ω = Co{[A
∗,1
div
A
∗,1
steer
B
∗,1
div
B
∗,1
steer
], ··· , [A
∗,s
div
A
∗,s
steer
B
∗,s
div
B
∗,s
steer
]}, (31)
where Co denotes the convex hull and
[A
∗,i
div
A
∗,i
steer
B
∗,i
div
B
∗,i
steer
] are vertices of the con-
vex hull. Any [A
∗
div
A
∗
steer
B
∗
div
B
∗
steer
] within the
convex set Ω is a linear combination of the vertices:
[A
∗
div
A
∗
steer
B
∗
div
B
∗
steer
] =
L
∑
j=1
a
j
[A
∗
div
A
∗
steer
B
∗
div
B
∗
steer
] (32)
with
∑
L
j=1
a
j
= 1, 0 ≤ a
j
≤ 1.
The CFTOC-design problem consists of com-
puting the optimum control vector sequence
˜
U =
[U
k
U
k+1
... U
k+N−1
]
T
, where N corresponds to the
prediction horizon that minimizes the following cost
function:
J
N
(X
k
, X
r
) = [X
k+N
− X
r
)]
T
˜
P[X
k+N
− X
r
] +
N−1
∑
m=0
[U
k+m
]
T
R[U
k+m
] + [X
k+m
− X
r
]
T
Q[X
k+m
− X
r
]
where
˜
P ∈ ℜ
6×6
with
˜
P =
˜
P
T
≥ 0, R ∈ ℜ
2×2
with
R = R
T
> 0 and Q ∈ ℜ
6×6
with Q = Q
T
≥ 0, are full
column rank weighting matrices penalizing the corre-
sponding optimization variables i.e predicted states,
control effort and the desired final state, respectively,
while X
r
is the reference set–point.
The solution to the CFTOC problem (Borelli et al.,
2003; Grieder et al., 2004; Kvasnica et al., 2004) is a
continuous control action of the form:
U
k
= F
l
X
k
+ G
l
if X
k
∈
˜
R
l
(33)
where
˜
R
l
, l ∈ {1, ...l
max
} corresponds to a convex
polyhedron (
˜
R
l
∈ ℜ
6
) calculated by the algorithm,
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
264
and F
l
∈ ℜ
2×6
, G
l
∈ ℜ
2,1
. The l
max
–number of poly-
hedra is similarly specified by the algorithm. In gen-
eral the higher the number of the PWA–systems along
with the large dimension of the state vector and the
number of constraints, the more complicated the so-
lution is.
This complexity increases significantly with the
value of the prediction horizon N, and the number
l
max
of the convex polyhedra (regions) grows up (usu-
ally) exponentially. Certain techniques have been de-
vised to merge the various regions into larger ones
without significantly compromising the validity of the
solution. For the on–line implementation of the con-
troller the number l
max
of the regions is not only a
measure of the controller’s complexity but also affects
its implementation typically precomputed in a look–
up table.
4 SIMULATION STUDIES
The proposed CFTO–control scheme has been ap-
plied in simulation studies on the model of the RE-
MUS AUV. Based on experimental results in (Pres-
tero, 2000) the parameters presented in Tables I and
II were tuned and the continuous time state space ma-
trices for the diving and steering motion of the AUV
are:
A
div
=
−0.82 0 −0.69
0 0 −1.54
1 0 0
, B
div
=
−4.16
0
0
(34)
A
steer
=
−1.01 −0.68 0
−0.54 −0.82 0
0 1 0
, B
steer
=
0.22
−1.19
0
(35)
The constraints on the control inputs and the out-
puts have been arbitrary set to: u
con
1
min
= −10 ≤
u
con
1
(t) ≤ 10 = u
con
1
max
, u
con
2
min
= −60 ≤ u
con
2
(t) ≤
60 = u
con
2
max
and y
1
min
= −50
0
≤ y
1
(t) ≤ 50
0
= y
1
max
,
y
2
min
= −70
0
≤ y
2
(t) ≤ 50
0
= y
1
max
respectively. The
constrains for the states have been set as:
−30
0
≤ X
1
≤ 30
0
−20
0
≤ X
2
≤ 20
0
−360 ≤ X
3
≤ −360
−50
0
≤ X
4
≤ 50
0
−40
0
≤ X
5
≤ 40
0
−360 ≤ X
3
≤ −360
For the state space matrices
A
div
, B
div
, A
steer
, B
steer
, we assume that there is
an additive corrupting uncertainty of 1%, while the
additive disturbances have been set to 0.01 · I
6×1
.
The selection that has been made on the penalizing
matrices for the CFTOC cost was P = 10
3
· I
6×6
,
R = I
2×2
and Q = 10
3
· I
6×6
. The output set–point
was selected for the diving motion as Y
1
ref
= 5
0
and Y
2
ref
= 5
0
for the steering motion. The initial
augmented state vector was X
init
= O
6×1
. For the
controllers formulation the 2− vector norm case was
tested and the discretization has been made with a
sampling period of T
s
= 1sec.
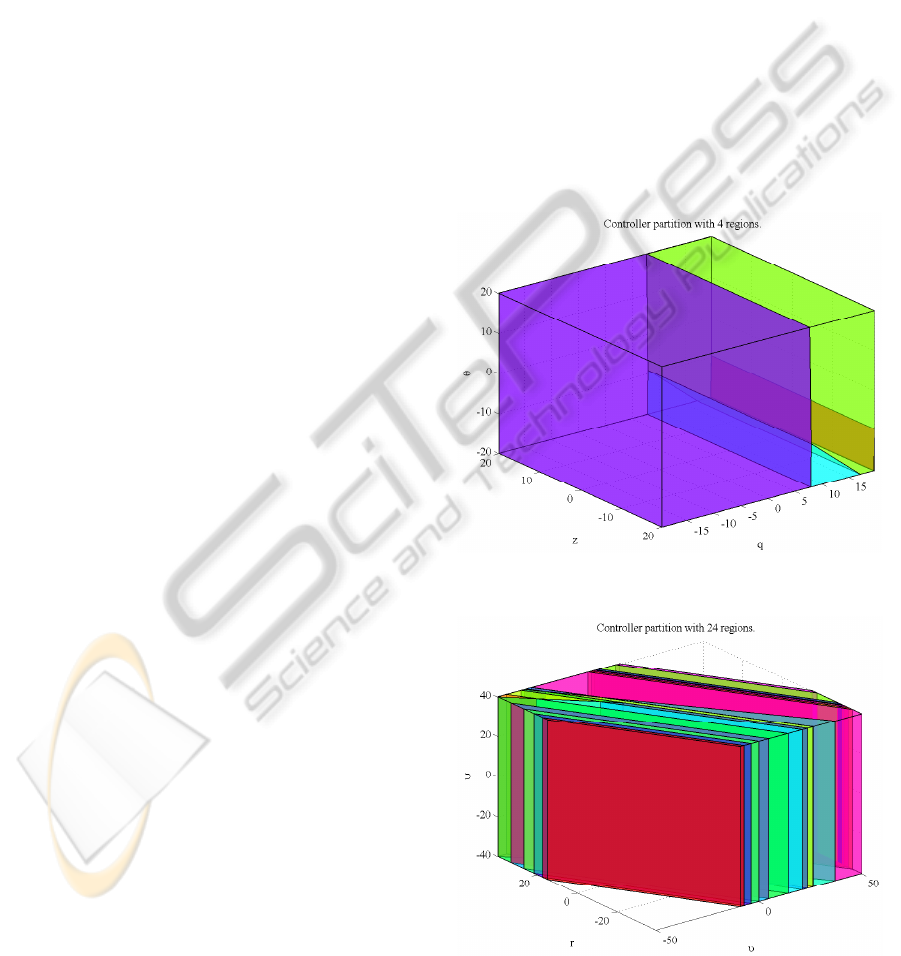
The resulting controllers’ partitions for the diving
and steering motion are presented in Figures 3 and 4,
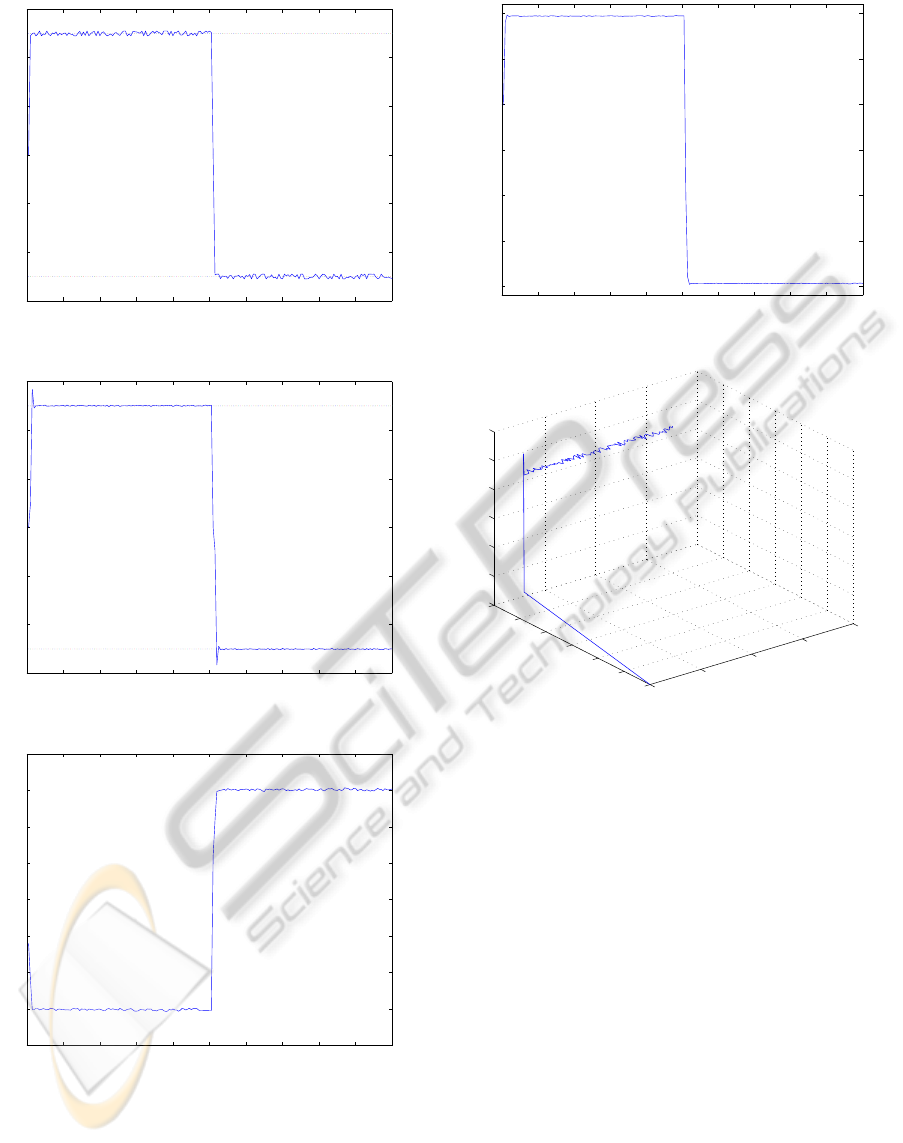
while the responses of the diving and steering motions
are displayed in Figures 5 and 6 respectively, while
the controllers’ response for the cases of the diving
and steering motion are presented in Figures 7 and 8
respectively. Finally in Figure 9 the 3–D combined
movement of the AUV (including displacement with
a constant speed (U=1.54m/sec) is displayed.
Figure 3: CFTO–Controller Partitioning for the Diving Mo-
tion.
Figure 4: CFTO–Controller Partitioning for the Steering
Motion.
A CONSTRAINED FINITE TIME OPTIMAL CONTROLLER FOR THE DIVING AND STEERING PROBLEM OF AN
AUTONOMOUS UNDERWATER VEHICLE
265
0 20 40 60 80 100 120 140 160 180 200
−6
−4
−2
0
2
4
6
Time(sec)
Diving Motion (Deg)
Figure 5: Diving Motion Time Response.
0 20 40 60 80 100 120 140 160 180 200
−6
−4
−2
0
2
4
6
Time(sec)
Steering Motion (Deg)
Figure 6: Steering Motion Time Response.
0 20 40 60 80 100 120 140 160 180 200
−4
−3
−2
−1
0
1
2
3
4
Time(sec)
Control Effort for the Diving Motion
Figure 7: Controller Effort for the Diving Motion.
5 CONCLUSIONS
In this paper a constrained finite time optimal con-
troller for the diving and steering motion of an AUV
has been presented. The utilized proposed scheme
0 20 40 60 80 100 120 140 160 180 200
−15
−10
−5
0
5
10
15
Time(sec)
Control Effort for the Steering Motion
Figure 8: Controller Effort for the Steering Motion.
0
50
100
150
200
0
1
2
3
4
5
6
0
1
2
3
4
5
6
x
y
z
Figure 9: 3–D Combined movement of the AUV.
was developed based on the decoupled equations of
motion for the diving and steering of the AUV. The
derived Constrained Finite Time Optimal control had
the ability to take under consideration: a) the con-
strains on the inputs, outputs, and the states of the
model, b) the corrupting disturbances due to the ex-
istence of the noise in the measurements, and c) the
uncertainty in the modeling procedures. Simulation
results have been presented that prove the validity of
the proposed scheme.
REFERENCES
Bjorn, J. (1994). The NDRE-AUV Flight Control System.
IEEE journal of Oceanic Engineering, 19(4).
Borelli, F., Baotic, M., Bemporad, A., and Morari, M.
(2003). An Efficient Algorithm for Computing the
State Feedback Optimal Control Law for Discrete
Time Hybrid Systems.
Cristi, R., Papoulias, A., and Healey, A. J. (1990). Adap-
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
266

tive Sliding Mode Control of Autonomous Undewater
Vehicle in the Dive Plane. IEEE Journal of Oceanic
Engineering, 15(3).
Debitetto, A. (1995). Fuzzy logic for depth control of un-
manned undersea vehicles. IEEE journal of Oceanic
Engineering, 20(3).
E. An, R. Dhanak, L. S. S. S. J. L. (2001). Coastal oceanog-
raphy using a small auv. Journal of Atmospheric and
Ocean Technology, (18):215–234.
Feldman, J. (1979). Revised standard submarine equations
of motion report dtnsrdc/spd-0393-09. Technical re-
port, David W. Taylor Naval Ship Research and De-
velopment Center, Bethesda, MD.
Field, A. I. (2000). Optimal control of an autonomous un-
derwater vehicle. In World Automatic Congress, Maui,
Hawaii.
Fodrea, L. R. (2002). Obstactle Avoidance Control for the
REMUS Autonomous Underwater Vehicle. PhD the-
sis, Naval Postgraduate School, Monterey, California.
Foresti, G. (2001). Visual inspection of sea bottom struc-
tures by an autonomous underwater vehicle. IEEE
Transactions on Systems, Man and Cybernetics - Part
B: cybernetics, 31(5).
Fossen, T. (1994a). Guidance and control of ocean vehicles.
John Wiley & Sons Ltd.
Fossen, T. I. (1994b). Guidance and Control of an Au-
tonomous Underwater Vehicle. John Wiley and Sons.
Gertler, M. and Hagen, G. (1967). Standard equations of
motion for submarine simulation report dtnsrdc 2510.
Technical report, David W. Taylor Naval Ship Re-
search and Development Center, Bethesda.
Grieder, P., Borelli, F., Torrisi, F., and Morari, M. (2004).
Computation of the Constrained Infinite Time Linear
Quadratic Regulator. Automatica, 40(4):701–708.
Healey, A. and Lienard, D. (1993). Multivariable sliding
mode control for autonomous diving and steering of
unmanned underwater vehicles. In IEEE Journal of
Oceanic Engineering, volume 18.
Humphreys, D. (1976). Development of the equations of
motion and transfer functions for underwater vehicles.
Technical report, Naval Coastal Systems Laboratory,
Panama City, FL.
Kawano, H. and Ura, T. (2002). Fast reinforcement learn-
ing algorithm for motion planning of non-holonomic
unmanned underwater vehicles. In Int. Conference on
Intelligent Robots and Systems IEEE/RSJ, Lausanne,
Switzerland.
Kvasnica, M., Grieder, P., Baotic, M., and Morari, M.
(2004). Multi–Parametric Toolbox (MPT). Hybrid
Systems: Computation and Control, (2993):448–462.
Pestero, T. (2001). Verification of six–degree of freedom
simulation model for the remus auv. Master’s thesis,
Massachusetts Institute of Technology.
Prestero, T. (2000). Development of a six–degree of free-
dom simulation model for the remus autonomous un-
derwater vahicle. In In Proceedings of MTS-IEEE
Oceans 2000,Providence, Rhode Island.
Prestero, T. (2001). Verification of a six-degree of freedom
simulation model for the remus autonomous underwa-
ter vehicle. Master’s thesis, Massachusetts Institute of
Technology and Woods Hole Oceanographic Institu-
tion, Cambridge, Massachusetts.
Rodrigues, L., Tavares, P., and Prado, M. (1996). Slid-
ing mode control of an auv in the diving and steering
planes. In OCEANS MTS/IEEE.
SNAME (1950). Nomenclature for treating the motion of a
submerged body through a fluid. The Society of Naval
Architects and Marine Engineers, Technical and Re-
serach Bulletin, (1-5):1–15.
Triantafyllou, M. and Franz, S. (2003). Hover maneuvering
and control of marine vehicles. Lectures.
Yuh, J. (2000). Design and control of autonomous underwa-
ter robots: A survey. Autonomous Robots, 8(1):7–24.
A CONSTRAINED FINITE TIME OPTIMAL CONTROLLER FOR THE DIVING AND STEERING PROBLEM OF AN
AUTONOMOUS UNDERWATER VEHICLE
267
