
ROBUSTNESS OF ISS SYSTEMS TO INPUTS WITH LIMITED
MOVING AVERAGE, WITH APPLICATION TO SPACECRAFT
FORMATIONS
Esten Ingar Grøtli
a
, Antoine Chaillet
b
, Elena Panteley
c
and Jan Tommy Gravdahl
a
a
Dept. of Eng. Cybernetics, NTNU, O. S. Bragstads plass 2D, 7491 Trondheim, Norway
b
Univ. Paris Sud 11 - L2S - EECI - Sup
´
elec, 3 rue Joliot-Curie, 91192 Gif Sur Yvette, France
c
CNRS - L2S, Sup
´
elec, 3 rue Joliot-Curie, 91192 Gif Sur Yvette, France
Keywords:
Robustness, ISS, Moving average of disturbances, Spacecraft formation.
Abstract:
We provide a theoretical framework that fits realistic challenges related to spacecraft formation with distur-
bances. We show that the input-to-state stability of such systems guarantees some robustness with respect to
a class of signals with bounded average-energy, which encompasses the typical disturbances acting on space-
craft formations. Solutions are shown to converge to the desired formation, up to an offset which is somewhat
proportional to the considered moving average of disturbances. The approach provides a tighter evaluation of
the disturbances’ influence, which allows for the use of more parsimonious control gains.
1 INTRODUCTION
Spacecraft formation control is a relatively new and
active field of research. Formations, characterized
by the ability to maintain relative positions without
real-time ground commands, are motivated by the aim
of placing measuring equipment further apart than
what is possible on a single spacecraft. This is de-
sirable as the resolution of measurements often are
proportional to the baseline length, meaning that ei-
ther a large monolithic spacecraft or a formation of
smaller, but accurately controlled spacecraft, may be
used. Monolithic spacecraft architecture that satisfy
the demand of resolution are often both impractical
and costly to develop and to launch. On the other
hand, smaller spacecrafts may be standardized and
have lower development cost. In addition they may
be of a lower collective weight and/or of smaller col-
lective size such that cheaper launch vehicles can be
used. There is also the possibility for them to piggy-
back with other commercial spacecraft. These advan-
tages, come at the cost of an increased complexity.
From a control design perspective, a crucial challenge
is to maintain a predefined relative trajectory, even in
presence of disturbances. Most of these disturbances
are hard to model in a precise manner. Only statistical
or averaged characteristics of the perturbing signals
(e.g. amplitude, energy, average energy, etc.) are typ-
ically available. These perturbing signals may have
diverse origins:
• Intervehicle Interference. In close formation or
spacecraft rendezvous, thruster firings and ex-
haust gases may influence other spacecraft.
• Solar wind and Radiation. Particles and radiation
expelled from the sun influence the spacecraft and
are highly dependent on the solar activity (Wertz,
1978), which is difficult to predict (Hanslmeier
et al., 1999).
• Small Debris. While large debris would typically
mean the end of the mission, some space trash, in-
cluding paint flakes, dust, coolant and even small
needles
1
, is small enough to “only” deteriorate the
performance, see (NASA, 1999).
• Micrometeroids. The damages caused by microm-
eteroids may be limited due to their tiny size, but
constant high velocity impacts also degrade the
performance of the spacecraft through momentum
transfer (Sch
¨
afer, 2006).
• Gravitational Disturbances. Even gravitational
1
Project West Ford was a test carried out in the early
1960s, where 480 million needles were placed in orbit, with
the aim to create an artificial ionosphere above the Earth to
allow global radio communication, (Overhage and Radford,
1964).
35
Ingar Grøtlia E., Chaillet A., Panteley E. and Tommy Gravdahl J. (2010).
ROBUSTNESS OF ISS SYSTEMS TO INPUTS WITH LIMITED MOVING AVERAGE, WITH APPLICATION TO SPACECRAFT FORMATIONS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 35-44
DOI: 10.5220/0002946500350044
Copyright
c
SciTePress

models including higher order zonal harmonics,
can only achieve a limited level of accuracy due
to the shape and inhomogeneity of the Earth. In
addition comes the gravitational perturbation due
to other gravitating bodies such as the Sun and the
Moon.
• Actuator Mismatch. There will commonly be a
mismatch between the actuation computed by the
control algorithm, and the actual actuation that the
thrusters can provide. This mismatch is particu-
larly present if the control algorithm is based on
continuous dynamics, without taking into account
pulse based thrusters.
Nonlinear control theory provides instruments to
guarantee a prescribed precision in spite of these dis-
turbances. Input-to-state stability (ISS) is a con-
cept introduced in (Sontag, 1989), which has been
thoroughly treated in the literature: see for instance
the survey (Sontag, 2008) and references therein.
Roughly speaking, this robustness property ensures
asymptotic stability, up to a term that is “propor-
tional” to the amplitude of the disturbing signal. Simi-
larly, its integral extension, iISS (Sontag, 1998), links
the convergence of the state to a measure of the energy
that is fed by the disturbance into the system. How-
ever, in the original works on ISS and iISS, both these
notions require that these indicators (amplitude or en-
ergy) be finite to guarantee some robustness. In par-
ticular, while this concept has proved useful in many
control application, ISS may yield very conservative
estimates when the disturbing signals come with high
amplitude even if their moving average is reasonable.
These limitations have already been pointed out
and partially addressed in the literature. In (Angeli
and Ne
ˇ
si
´
c, 2001), the notions of “Power ISS” and
“Power iISS” are introduced to estimate more tightly
the influence of the power or moving average of the
exogenous input on the power of the state. Under the
assumption of local stability for the zero-input sys-
tem, these properties are shown to be actually equiv-
alent to ISS and iISS respectively. Nonetheless, for a
generic class of input signals, no hard bound on the
state norm can be derived for this work.
Other works have focused on quantitative aspects
of ISS, such as (Praly and Wang, 1996), (Gr
¨
une,
2002) and (Gr
¨
une, 2004). All these three papers solve
the problem by introducing a “memory fading” effect
in the input term of the ISS formulation. In (Praly and
Wang, 1996) the perturbation is first fed into a linear
scalar system whose output then enters the right hand
side of the ISS estimate. The resulting property is re-
ferred to as exp-ISS and is shown to be equivalent to
ISS. In (Gr
¨
une, 2002) and (Gr
¨
une, 2004) the concept
of input-to-state dynamical stability (ISDS) is intro-
duced and exploited. In the ISDS state estimate, the
value of the perturbation at each time instant is used
as the initial value of a one-dimensional system, thus
generalizing the original idea of Praly and Wang. The
quantitative knowledge of how past values of the in-
put signal influence the system allows, in particular, to
guarantee an explicit decay rate of the state for van-
ishing perturbations.
In this paper, our objective is to guarantee hard
bound on the state norm for ISS systems in presence
of signals with possibly unbounded amplitude and/or
energy. We enlarge the class of signals to which ISS
systems are robust, by simply conducting a tighter
analysis on these systems. In the spirit of (Angeli
and Ne
ˇ
si
´
c, 2001), and in contrast to most previous
works on ISS and iISS, the considered class of dis-
turbances is defined based on their moving average.
We show that any ISS system is robust to such a class
of perturbations. When an explicitly Lyapunov func-
tion is known, we explicitly estimate the maximum
disturbances’ moving average that can be tolerated
for a given precision. These results are presented in
Section 2. We then apply this new analysis result
to the control of spacecraft formations. To this end,
we exploit the Lyapunov function available for such
systems to identify the class of signals to which the
formation is robust. This class includes all kind of
perturbing effects described above. This study is de-
tailed, and illustrated by simulations, in Section 3.
Notation and Terminology
A continuous function α : R
≥
→ R
≥0
is of class K
(α ∈ K ), if it is strictly increasing and α(0) = 0. If,
in addition, α(s) → ∞ as s →∞, then α is of class K
∞
(α ∈ K
∞
). A continuous function β : R
≥0
×R
≥0
→
R
≥0
is said to be of class K L if, β(·,t) ∈ K for any
t ∈ R
≥0
, and β(s,·) is decreasing and tends to zero
as s tends to infinity. The solutions of the differential
equation ˙x = f (x, u) with initial condition x
0
∈ R
n
is
denoted by x(·; x
0
,u). We use |·| for the Euclidean
norm of vectors and the induced norm of matrices.
The closed ball in R
n
of radius δ centered at the ori-
gin is denoted by B
δ
, i.e. B
δ
:= {x ∈ R
n
: |x| ≤ δ}.
|·|
δ
denotes the distance to the ball B
δ
, that is |x|
δ
:=
inf
z∈B
δ
|x −z|. U denotes the set of all measurable lo-
cally essentially bounded signals u : R
≥0
→ R
p
. For
a signal u ∈ U, kuk
∞
:= ess sup
t≥0
|u(t)|. The maxi-
mum and minimum eigenvalue of a symmetric matrix
A is denoted by λ
max
(A) and λ
min
(A), respectively. I
n
and 0
n
denote the identity and null matrices of R
n×n
respectively.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
36

2 ISS SYSTEMS AND SIGNALS
WITH LOW MOVING
AVERAGE
2.1 Preliminaries
We start by recalling some classical definitions related
to the stability and robustness of nonlinear systems of
the form
˙x = f (x,u), (1)
where x ∈ R
n
, u ∈ U and f : R
n
×R
p
→R
n
is locally
Lipschitz and satisfies f (0, 0) = 0.
Definition 1. Let δ be a positive constant and u be a
given signal in U. The ball B
δ
is said to be globally
asymptotically stable (GAS) for (1) if there exists a
class K L function β such that the solution of (1) from
any initial state x
0
∈ R
n
satisfies
|x(t;x
0
,u)| ≤ δ +β(|x
0
|,t), ∀t ≥ 0. (2)
Definition 2. The ball B
δ
is said to be globally ex-
ponentially stable (GES) for (1) if the conditions of
Definition 1 hold with β(r,s) = k
1
re
−k
2
s
for some pos-
itive constants k
1
and k
2
.
We next recall the definition of ISS, originally in-
troduced in (Sontag, 1989).
Definition 3. The system ˙x = f (x, u) is said to be
input-to-state stable (ISS) if there exist β ∈ K L and
γ ∈ K
∞
such that, for all x
0
∈ R
n
and all u ∈ U, the
solution of (1) satisfies
|x(t;x
0
,u)| ≤ β(|x
0
|,t) +γ(kuk
∞
), ∀t ≥ 0 . (3)
ISS thus imposes an asymptotic decay of the norm
of the state up to a function of the amplitude kuk
∞
of
the input signal.
We also recall the following well-known Lya-
punov characterization of ISS, originally established
in (Praly and Wang, 1996) and thus extending the
original characterization proposed by Sontag in (Son-
tag and Wang, 1995).
Proposition 1. The system (1) is ISS if and only if
there exist α, α,γ ∈ K
∞
and κ > 0 such that, for all
x ∈R
n
and all u ∈ R
p
,
α(|x|) ≤V (x) ≤ α(|x|) (4)
∂V
∂x
(x) f (x,u) ≤ −κV (x)+ γ(|u|) . (5)
γ is then called a supply rate for (1).
Remark 1. Since ISS implies iISS (cf. (Sontag,
1998)), it can be shown that the solutions of any ISS
system with supply rate γ satisfies, for all x
0
∈ R
n
,
|x(t;x
0
,u)|≤β(|x
0
|,t)+η
Z
t
0
γ(|u(τ)|)dτ
, ∀t ≥0 ,
(6)
where β ∈ K L and η ∈ K
∞
. The above integral can
be seen as a measure, through the function γ, of the
energy of the input signal u.
The above remark establishes a link between a
measure of the energy fed into the system and the
norm of the state: for ISS (and iISS) systems, if this
input energy is small, then the state will eventually be
small. However, Inequalities (3) and (6) do not pro-
vide any information on the behavior of the system
when the amplitude (for (3)) and/or the energy (for
(6)) of the input signal is not finite.
From an applicative viewpoint, the precision guar-
anteed by (3) and (6) involve the maximum value and
the total energy of the input. These estimates may
be conservative and thus lead to the design of greedy
control laws, with negative consequences on the en-
ergy consumption and actuators solicitation. This is-
sue is particularly relevant for spacecraft formations
in view of the inherent fuel limitation and limited
power of the thrusters.
(Angeli and Ne
ˇ
si
´
c, 2001) has started to tackle this
problem by introducing ISS and iISS-like properties
for input signals with limited power, thus not neces-
sarily bounded in amplitude nor in energy. For sys-
tems that are stable when no input is applied, the
authors show that ISS (resp. iISS) is equivalent to
“power ISS” (resp. “power iISS”) and “moving av-
erage ISS” (resp. “moving average iISS”). In general
terms, these properties evaluate the influence of the
amplitude (resp. the energy) of the input signal on the
power or moving average of the state. However, as
stressed by the authors themselves, these estimates do
not guarantee in general any hard bound on the state
norm. Here, we consider a slightly more restrictive
class of input signals under which such a hard bound
can be guaranteed. Namely, we consider input signals
with bounded moving average.
Definition 4. Given some constants E, T > 0 and
some function γ ∈ K , the set W
γ
(E, T ) denotes the
set of all signals u ∈ U satisfying
Z
t+T
t
γ(|u(s)|)ds ≤ E , ∀t ∈ R
≥0
.
The main concern here is the measure E of the
maximum energy that can be fed into the system over
a moving time window of given length T . These
quantities are the only information on the distur-
bances that will be taken into account in the control
design. More parsimonious control laws than those
based on their amplitude or energy can therefore be
expected. We stress that signals of this class are not
necessarily globally essentially bounded, nor are they
required to have a finite energy, as illustrated by the
following examples. Robustness to this class of sig-
ROBUSTNESS OF ISS SYSTEMS TO INPUTS WITH LIMITED MOVING AVERAGE, WITH APPLICATION TO
SPACECRAFT FORMATIONS
37
0 1 2 3 4 5 6 7 8 9
0
1
2
3
4
5
6
7
8
9
t
u(t)
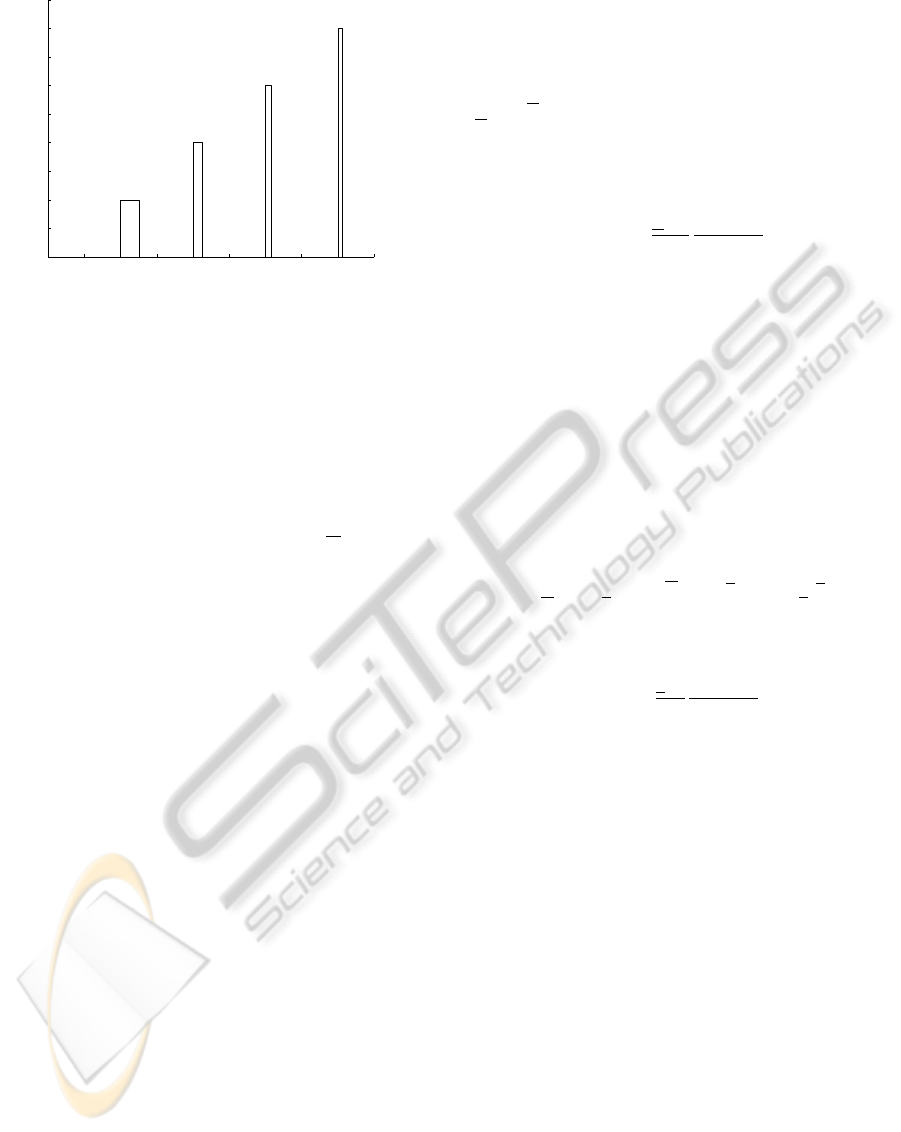
Figure 1: An example of unbounded signal with bounded
moving average.
nals thus constitutes an extension of the typical prop-
erties of ISS systems.
Example 1.
1. Unbounded signals: given any T > 0 and any γ ∈
K , the following signal belongs to W
γ
(1,T ) and
satisfies limsup
t→∞
|u(t)| = +∞:
u(t) :=
2k if t ∈ [2kT ;2kT +
1
2k
], k ∈ N
0 otherwise.
The signal for T = 1 is illustrated in Figure 1.
2. Essentially bounded signals: given any T > 0 and
any γ ∈ K , if kuk
∞
is finite then it holds that
u ∈W
γ
(T γ(kuk
∞
),T ). We stress that this includes
signals with infinite energy (think for instance of
constant non-zero signals).
2.2 Robustness of ISS Systems to
Signals in the Class W
The following result establishes that the impact of an
exogenous signal on the qualitative behavior of an ISS
systems is negligible if the moving average of this sig-
nal is sufficiently low.
Theorem 1. Assume that the system ˙x = f (x,u) is ISS.
Then there exists a function γ ∈ K
∞
and, given any
precision δ > 0 and any time window T > 0, there
exists a positive average energy E(T,δ) such that the
ball B
δ
is GAS for any u ∈ W
γ
(E, T ).
The above result, proved in Section 4, adds an-
other brick in the wall of nice properties induced by
ISS, cf. (Sontag, 2008) and references therein. It en-
sures that, provided that a steady-state error δ can be
tolerated, every ISS system is robust to a class of dis-
turbances with sufficiently small moving average.
If an ISS Lyapunov function is known for the sys-
tem, then an explicit bound on the tolerable average
excitation can be provided based on the prooflines of
Theorem 1. More precisely, we state the following
result.
Corollary 1. Assume there exists a continuously dif-
ferentiable function V : R
n
→R
≥0
, class K
∞
functions
γ, α and α and a positive constant κ such that (4) and
(5) hold for all x ∈ R
n
and all u ∈ R
p
. Given any pre-
cision δ > 0 and any time window T > 0, let E denote
any average energy satisfying
E(T, δ) ≤
α(δ)
2
e
κT
−1
2e
κT
−1
. (7)
Then the ball B
δ
is GAS for ˙x = f (x, u) for any u ∈
W
γ
(E, T ).
The above statement shows that, by knowing a
Lyapunov function associated to the ISS of a system,
and in particular its dissipation rate γ, one is able to
explicitly identify the class W
γ
(E, T ) to which it is
robust up to the prescribed precision δ.
In a similar way, we can state sufficient condition
for global exponential stability of some neighborhood
of the origin. This result follows also trivially from
the proof of Theorem 1.
Corollary 2. If the conditions of Corollary 1 are sat-
isfied with α(s) = cs
p
and α(s) = cs
p
, with c, c, p pos-
itive constants, then, given any T,δ > 0, the ball B
δ
is GES for (1) with any signal u ∈W
γ
(E, T ) provided
that
E(T, δ) ≤
cδ
p
2
e
κT
−1
2e
κT
−1
.
3 ILLUSTRATION: SPACECRAFT
FORMATION CONTROL
We now exploit the results developed in Section 2 to
demonstrate the robustness of a spacecraft formation
control in a leader-follower configuration, when only
position is measured. The focus on output feedback in
this illustration is motivated by the fact that velocity
measurements in space may not be easily achieved,
e.g. because the spacecraft cannot be equipped with
the necessary sensors for such measurements due to
space constraints or budget limits. The models de-
scribed in this section have strong resemblance with
the model of a robot manipulator. Our control de-
sign is therefore be based on control algorithms al-
ready validated for robot manipulators, in particular
(Berghuis and Nijmeijer, 1993) and (Paden and Panja,
1988). We stress that he proposed study is made for
two spacecraft only, but can easily be extended to for-
mations involving more spacecrafts.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
38

3.1 Spacecraft Models
The spacecraft models presented in this section are
similar to the ones derived in (Ploen et al., 2004).
All coordinates, both for the leader and the follower
spacecraft, are expressed in an orbital frame, which
origin relative to the center of Earth is given by ~r
o
,
and satisfies Newton’s gravitational law
¨
~r
o
= −
µ
|
~r
o
|
3
~r
o
,
µ being the gravitational constant of Earth. The unit
vectors are such that ~o
1
:=~r
o
/|~r
o
| points in the anti-
nadir direction, ~o
3
:= (~r
o
×
˙
~r
o
)/|~r
o
×
˙
~r
o
| points in the
direction of the orbit normal, and finally ~o
2
:= ~o
3
×
~o
1
completes the right-handed orthogonal frame. We
let ν
o
denote the true-anomaly of this reference frame
and assume the following:
Assumption 1. The true anomaly rate
˙
ν
o
and true
anomaly rate-of-change
¨
ν
o
of the reference frame sat-
isfy k
˙
ν
o
k
∞
≤ β
˙
ν
o
and k
¨
ν
o
k
∞
≤ β
¨
ν
o
, for some positive
constants β
˙
ν
o
and β
¨
ν
o
.
Note that this assumption is naturally satisfied
when the reference frame is following a Keplerian or-
bit, but it also holds for any sufficiently smooth refer-
ence trajectory. We define the following quantities:
C (
˙
ν
o
) := 2
˙
ν
o
¯
C,
¯
C :=
0 −1 0
1 0 0
0 0 0
,
D(
˙
ν
o
,
¨
ν
o
) :=
˙
ν
2
o
¯
D +
¨
ν
o
¯
C,
¯
D := diag(−1, −1,0),
and
n(r
o
, p) := µ
r
o
+ p
|r
o
+ p|
3
−
r
o
|r
o
|
3
.
In the above reference frame, the dynamics ruling
the evolution of the coordinate p ∈ R
3
of the leader
spacecraft is then given by
¨p +C (
˙
ν
o
) ˙p + D(
˙
ν
o
,
¨
ν
o
) p + n (r
o
, p) = F
l
(8)
with F
l
:= (u
l
+d
l
)/m
l
, while the evolution of the rel-
ative position ρ of the follower spacecraft with respect
to the leader is given by
¨
ρ +C (
˙
ν
o
)
˙
ρ + D(
˙
ν
o
,
¨
ν
o
)ρ + n (r
o
+ p, ρ) = F
f
−F
l
,
(9)
where F
f
:= (u
f
+d
f
)/m
f
, and where subscripts l and
f stand for the leader and follower spacecraft respec-
tively, m
l
and m
f
are the spacecrafts’ masses, u
l
and
u
f
are the control inputs, and d
l
and d
f
denote all ex-
ogenous perturbations acting on the spacecrafts (e.g.,
as detailed in the Introduction; intervehicle interfer-
ence, small impacts, solar wind, etc.).
3.2 Control of the Leader Spacecraft
We now propose a controller whose goal is to make
the leader spacecraft follow a given trajectory p
d
:
R
≥0
→ R
3
relative to the reference frame. In other
words, its aim is to decrease the tracking error defined
as e
l
:= p − p
d
. To derive this controller, we rely on
the position p of the leader only. No measurement on
its velocity is required. The latter will be estimated
through the derivative of the some position estimate
ˆp in order to avoid brute force derivation of the mea-
surement p. We therefore define ˜p := p − ˆp as the
estimation error. Similarly to (Berghuis, 1993), the
controller is given by:
u
l
=m
l
h
¨p
d
+C (
˙
ν
o
) ˙p
d
+ D (
˙
ν
o
,
¨
ν
o
) p + n (r
o
, p)
−k
l
( ˙p
0
− ˙p
r
)
i
(10)
˙p
r
= ˙p
d
−`
l
e
l
(11)
˙p
0
=
˙
ˆp −`
l
˜p, (12)
where k
l
and `
l
denote positive gains. The velocity
estimator is given by
˙
ˆp = a
l
+ (l
l
+ `
l
) ˜p (13)
˙a
l
= ¨p
d
+ l
l
`
l
˜p , (14)
where l
l
denotes another positive gain. Define X
l
:=
e
>
l
, ˙e
>
l
, ˜p
>
,
˙
˜p
>
>
∈ R
12
and d := (d
>
l
,d
>
f
)
>
∈ R
6
.
Then the leader dynamics takes the form of a per-
turbed linear time-varying system:
˙
X
l
= A
l
(
˙
ν
o
(t))X
l
+ B
l
d , (15)
where A
l
∈R
12×12
and B
l
∈R
12×6
refer to the follow-
ing matrices
A
l
(
˙
ν
o
) :=
0
3
I
3
0
3
0
3
a
21
a
22
(
˙
ν
o
) a
23
a
24
0
3
0
3
0
3
I
3
a
41
a
42
(
˙
ν
o
) a
43
a
44
, (16)
B
l
:=
1
m
l
0
3
0
3
I
3
0
3
0
3
0
3
I
3
0
3
,
where out of notational compactness, the following
matrices are defined: a
21
:= a
41
:= −k
l
`
l
I
3
, a
22
:=
a
42
:= −C(
˙
ν
o
)−k
l
I
3
, a
23
:= k
l
`
l
I
3
, a
24
:= k
l
I
3
, a
43
:=
(k
l
−l
l
)`
l
I
3
and a
44
:= (k
l
−l
l
−`
l
)I
3
.
3.3 Control of the Follower Spacecraft
We next propose a controller to make the follower
spacecraft track a desired trajectory ρ
d
: R
≥0
→ R
3
relative to the leader. In the same way as for the leader
ROBUSTNESS OF ISS SYSTEMS TO INPUTS WITH LIMITED MOVING AVERAGE, WITH APPLICATION TO
SPACECRAFT FORMATIONS
39

spacecraft, let
˙
ˆ
ρ ∈R
3
denote the estimated velocity of
the follower with respect to the leader, let e
f
:= ρ−ρ
d
denote the tracking error and let
˜
ρ := ρ −
ˆ
ρ be the es-
timation error. We use the following control law:
u
f
=m
f
h
¨p
d
+
¨
ρ
d
+C (
˙
ν
o
)( ˙p
d
+
˙
ρ
d
)
+ D (
˙
ν
o
,
¨
ν
o
)(p + ρ) + n(r
o
+ p, ρ) +n(r
o
, p)
−k
l
( ˙p
0
− ˙p
r
) −k
f
(
˙
ρ
0
−
˙
ρ
r
)
i
(17)
˙
ρ
r
=
˙
ρ
d
−`
f
e
f
(18)
˙
ρ
0
=
˙
ˆ
ρ −`
f
˜
ρ, (19)
with the observer being given by
˙
ˆ
ρ = a
f
+ (l
f
+ `
f
)
˜
ρ (20)
˙a
f
=
¨
ρ
d
+ l
f
`
f
˜
ρ (21)
where k
f
, l
f
and `
f
denote positive tuning gains.
We stress that, in order to implement (17), (11)-(14)
must also be implemented in follower spacecraft con-
trol algorithm. Define X
f
:= (e
>
f
, ˙e
>
f
,
˜
ρ
>
,
˙
˜
ρ
>
)
>
∈R
12
.
Combining (9) and (17)-(21) and inserting the leader
spacecraft controller u
l
(10), we can summarize the
follower spacecraft’s dynamics by
˙
X
f
= A
f
(
˙
ν
o
(t))X
f
+ B
f
d , (22)
where A
f
(
˙
ν
o
) can be obtained from A
l
(
˙
ν
o
) (cf. (16))
by simply substituting the subscripts l by f in the ex-
pression of the submatrices a
i j
, and
B
f
:=
1
m
l
m
f
0
3
0
3
−m
f
I
3
m
l
I
3
0
3
0
3
−m
f
I
3
m
l
I
3
.
3.4 Robustness Analysis of the Overall
Formation
We are now ready to state the following result, which
establishes the robustness of the controlled formation
to a wide class of disturbances.
Proposition 2. Let Assumption 1 hold. Let the con-
troller of the leader spacecraft be given by (10)-(14)
and the controller of the follower spacecraft be given
by (17)-(21) with, for each i ∈{l, f }, l
i
≥2k
i
, k
i
> 2k
?
i
and (for simplicity) `
i
≥ 1, where
k
?
i
:= `
i
+ β
˙
ν
o
q
2`
2
i
+ 1 +
1 +
m
2
f
m
2
l
!
2
l
2
i
+ 1
m
2
i
.
(23)
Given any precision δ > 0 and any time window T >
0, consider any average energy satisfying
E ≤
1
4
min
i∈{l, f }
`
2
i
−
1
2
q
4`
4
i
+ 1 +
1
2
δ
2
e
κT
−1
2e
κT
−1
,
(24)
where
κ :=
min
i∈{l, f }
k
?
i
/max
i∈{l, f }
n
k
i
`
i
o
max
i∈{l, f }
`
2
i
+
1
2
q
4`
4
i
+ 1 +
1
2
. (25)
Then, for any d ∈ W
γ
(E, T ) where γ(s) := s
2
, the ball
B
δ
is GES for the overall formation summarized by
(15) and (22).
Proof. Let the overall dynamics be condensed into
˙
X = AX +Bd with X := (X
>
1
,X
>
2
)
>
, A := diag(A
l
,A
f
)
and B := (B
>
l
,B
>
f
)
>
. The proof is done by applying
Corollary 2. Consider the Lyapunov function candi-
date
V (X) :=
1
2
∑
i∈{l, f }
V
i
(X
i
)
where V
i
(X
i
) := X
>
i
W
>
i
R
i
W
i
X
i
, R
i
:= diag((2k
i
/`
i
−
1)I
3
,I
3
,2k
i
/`
i
I
3
,I
3
) and
W
i
:=
`
i
I
3
0
3
0
3
0
3
`
i
I
3
I
3
0
3
0
3
0
3
0
3
`
i
I
3
0
3
0
3
0
3
`
i
I
3
I
3
.
It can be shown that the time derivative of the Lya-
punov function candidate can be written as
˙
V =
∑
i∈{l, f }
X
>
i
W
>
i
R
i
W
i
A
i
X
i
+ X
>
i
W
>
i
R
i
W B
i
d
= −
∑
i∈{l, f }
X
>
i
(Q
i
+ S
i
)X
i
−X
>
i
W
>
i
R
i
W
i
B
i
d
!
where Q
i
:= diag(k
i
`
2
i
I
3
,(k
i
−`
i
)I
3
,k
i
`
2
i
I
3
,k
i
I
3
),
S
i
:=
1
2
0
3
C (
˙
ν
o
)`
i
0
3
0
3
C
>
(
˙
ν
o
)`
i
0
3
C
>
(
˙
ν
o
)`
i
C
>
(
˙
ν
o
)
0
3
C (
˙
ν
o
)`
i
`
2
s
i
`s
i
0
3
C (
˙
ν
o
) `s
i
s
i
,
where s
i
:= 2(l
i
−2k
i
)I
3
. Since l
i
≥ 2k
i
, −X
>
i
S
i
X
i
≤
k
˙
ν
o
k
∞
(2`
2
i
+ 1)
1/2
|X
i
|
2
. Furthermore, λ
min
(Q
i
) =
min{k
i
−`
i
,k
i
`
2
i
} = k
i
−`
i
for `
i
≥ 1, |W
>
l
R
l
W
l
B
l
| =
(2(l
2
l
+ 1))
1/2
/m
l
, |W
>
f
R
f
W
f
B
f
| = (2(m
2
f
+ m
2
l
)(l
2
f
+
1))
1/2
/(m
l
m
f
), and invoking Assumption 1, we get
that the derivative of the Lyapunov function can be
upper bounded as:
˙
V ≤ −
∑
i∈{l, f }
k
i
−`
i
−β
˙
ν
o
q
2`
2
i
+ 1|X
i
|
2
+
q
2
l
2
l
+ 1
m
l
|X
l
|
|
d
|
+
q
2(m
2
f
+ m
2
l
)(l
2
f
+ 1)
m
l
m
f
|X
f
|
|
d
|
.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
40

By Young’s inequality it follows that
˙
V ≤−
∑
i∈{l, f }
h
k
i
−`
i
−β
˙
ν
o
q
2`
2
i
+ 1
−
1 +
m
2
f
m
2
l
2
l
2
i
+ 1
m
2
i
i
|X
i
|
2
+
|
d
|
2
.
If we chose k
l
> 2k
?
l
and k
f
> 2k
?
f
as given in the
statement of Proposition 2, R
l
,R
f
,Q
l
,Q
f
are all pos-
itive definite matrices. Furthermore, it can be shown
that c
|X|
2
≤V (X) ≤ c|X|
2
, where
c :=
1
2
min
i∈{l, f }
`
2
i
−
1
2
q
4`
4
i
+ 1 +
1
2
(26)
c := max
i∈{l, f }
k
i
`
i
max
i∈{l, f }
`
2
i
+
1
2
q
4`
4
i
+ 1 +
1
2
.
(27)
Using these inequalities, we get that
˙
V ≤ − min
i∈{l, f }
{k
?
i
}
|
X
l
|
2
+
X
f
2
+
|
d
|
2
≤ −κV (x) +
|
d
|
2
with the constant κ defined in (25). Hence, the condi-
tions of Corollary 2 are satisfied, with c and c defined
in (26)-(27) and γ (s) = s
2
, and the conclusion follows.
3.5 Simulations
Let the reference orbit be an eccentric orbit with ra-
dius of perigee r
p
= 10
7
m and radius of apogee r
a
=
3 ×10
7
m, which can be generated by numerical inte-
gration of
¨r
o
= −
µ
|
r
o
|
3
r
o
, (28)
with r
o
(0) = (r
p
,0, 0) and ˙r
o
(0) = (0, v
p
,0), and
where
v
p
=
s
2µ
1
r
p
−
1
(r
p
+ r
a
)
.
The true anomaly ν
o
of the reference frame can be
obtained by numerical integration of the equation
¨
ν
o
(t) =
−2µe
o
(1 + e
o
cosν
o
(t))
3
sinν
o
(t)
1
2
(r
p
+ r
a
)(1 −e
2
o
)
3
.
From this expression, and the eccentricity, which can
be calculated from r
a
and r
p
to be e
o
= 0.5, we see
that the constant β
¨
ν
o
in Assumption 1 can be chosen
as β
¨
ν
o
= 4 ×10
−7
. From the analytical equivalent for
˙
ν
o
,
˙
ν
o
(t) =
√
µ(1 + e
o
cosν
o
(t))
2
1
2
(r
p
+ r
a
)(1 −e
2
o
)
3/2
,
we see that the constant β
˙
ν
o
in Assumption 1 can be
chosen as β
˙
ν
o
= 8 ×10
−4
. Since the reference frame
is initially at perigee, ν
o
(0) = 0 and
˙
ν
o
(0) = v
p
/r
p
.
For simplicity, we choose the desired trajectory of the
leader spacecraft to coincide with the reference or-
bit, i.e. p
d
(·) ≡ (0, 0,0)
>
. The initial values of the
leader spacecraft are p
l
(0) = (2, −2,3)
>
and ˙p
l
(0) =
(0.4,−0.8, −0.2)
>
. The initial values of the observer
are chosen as ˆp (0) = (0,0, 0)
>
and a
l
(0) = (0,0, 0)
>
.
The reference trajectory of the follower space-
craft are chosen as the solutions of a special case of
the Clohessy-Wiltshire equations, cf. (Clohessy and
Wiltshire, 1960). We use
ρ
d
(t) =
10cos ν
o
(t)
−20sin ν
o
(t)
0
. (29)
This choice imposes that the two spacecrafts evolve
in the same orbital plane, and that the follower space-
craft will make a full rotation about the leader space-
craft per orbit around the Earth. The initial val-
ues of the follower spacecraft are ρ (0) = (9,−1, 2)
>
and
˙
ρ(0) = (−0.3,0.2, 0.6)
>
. The initial parame-
ters of the observer are chosen to be
ˆ
ρ(0) = ρ
d
(0) =
(10,0, 0)
>
and a
f
(0) = (0,0,0)
>
. We use m
f
= m
l
=
25 kg both in the model and the control structure.
The choice of control gains are based on the anal-
ysis in Section 3. First we pick `
i
= 1, i ∈
{
l, f
}
.
Then, by using that β
˙
ν
o
= 8 ×10
−4
, we find that
k
?
i
= 1.0014 + 0.0064(l
2
i
+ 1) from (23). Since k
i
should satisfy k
i
> 2k
?
i
and l
i
≥2k
i
, we chose k
i
= 2.3
and l
i
= 4.6, i ∈
{
l, f
}
. With these choices, we find
from (25) that κ ≈ 0.1899. Over a 10 second inter-
val (i.e. T=10), the average excitation must satisfy
E(T, δ) ≤ 0.0439 δ
2
, according to (24). We consider
two types of disturbances acting on the spacecraft:
“impacts” and continuous disturbances. The “im-
pacts” have random amplitude, but with maximum
of 1.5 N in each direction of the Cartesian frame.
For simplicity, we assume that at most one impact
can occur over each 10 second interval, and we as-
sume that the duration of each impact is 0.1s. The
continuous part is taken as sinusoids, also acting in
each direction of the Cartesian frame, and are cho-
sen to be (0.1sin 0.01t,0.25 sin 0.03t,0.3 sin 0.04t)
>
for both spacecraft. The motivation for choosing the
same kind of continuous disturbance for both space-
craft, is that this disturbance is typically due to grav-
itational perturbation, which at least for close forma-
tions, have the same effect on both spacecraft. Notice
from (9) that the relative dynamics are influenced by
disturbances acting on the leader and follower space-
craft, so the effect of the continuous part of the distur-
bance on the relative dynamics is zero. It can easily
ROBUSTNESS OF ISS SYSTEMS TO INPUTS WITH LIMITED MOVING AVERAGE, WITH APPLICATION TO
SPACECRAFT FORMATIONS
41
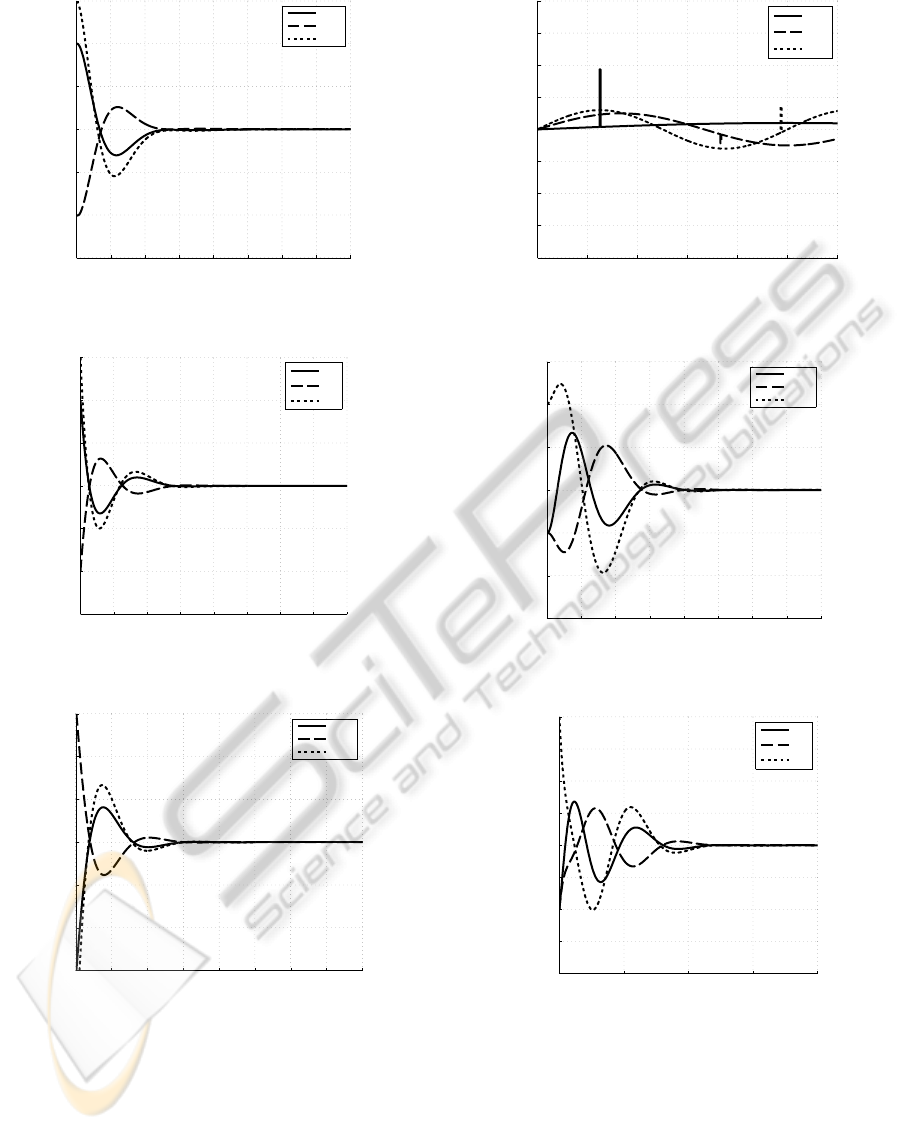
0 1 2 3 4 5 6 7 8
−3
−2
−1
0
1
2
3
Time [s]
Position tracking error [m]
e
l,1
e
l,2
e
l,3
Figure 2: Position tracking error of the leader spacecraft.
0 1 2 3 4 5 6 7 8
−3
−2
−1
0
1
2
3
Time [s]
Position estimation error [m]
˜p
1
˜p
2
˜p
3
Figure 3: Position estimation error of the leader spacecraft.
0 1 2 3 4 5 6 7 8
−600
−400
−200
0
200
400
600
Time [s]
Control history [N]
u
l,1
u
l,2
u
l,3
Figure 4: Control actuation of the leader spacecraft.
be shown that the disturbances satisfy the following:
Z
t+10
t
|d(τ)|
2
dτ ≤ 1.42, ∀t ≥ 0 .
Figure 2, 3 and 4 show the position tracking er-
ror, position estimation error and control history of
the leader spacecraft, whereas Figure 6, 7 and 8 are
the equivalent figures for the follower spacecraft. Fig-
0 5 10 15 20 25 30
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time [s]
Disturbance [N]
d
l,1
d
l,2
d
l,3
Figure 5: Disturbances acting on the leader spacecraft.
0 1 2 3 4 5 6 7 8
−3
−2
−1
0
1
2
3
Time [s]
Position tracking error [m]
e
f,1
e
f,2
e
f,3
Figure 6: Position tracking error of the follower spacecraft.
0 2 4 6 8
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time [s]
Position estimation error [m]
˜ρ
1
˜ρ
2
˜ρ
3
Figure 7: Position estimation error of the follower space-
craft.
ure 5 and 9 show the effect of d
l
and d
l
−d
f
acting
on the formation. Notice in Figure 9 that the ef-
fect of the continuous part of the disturbance is can-
celed out (since we consider relative dynamics and
both spacecraft are influenced by the same continu-
ous disturbance), whereas the effect of the impacts
has increased compared to the effect of the impacts
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
42
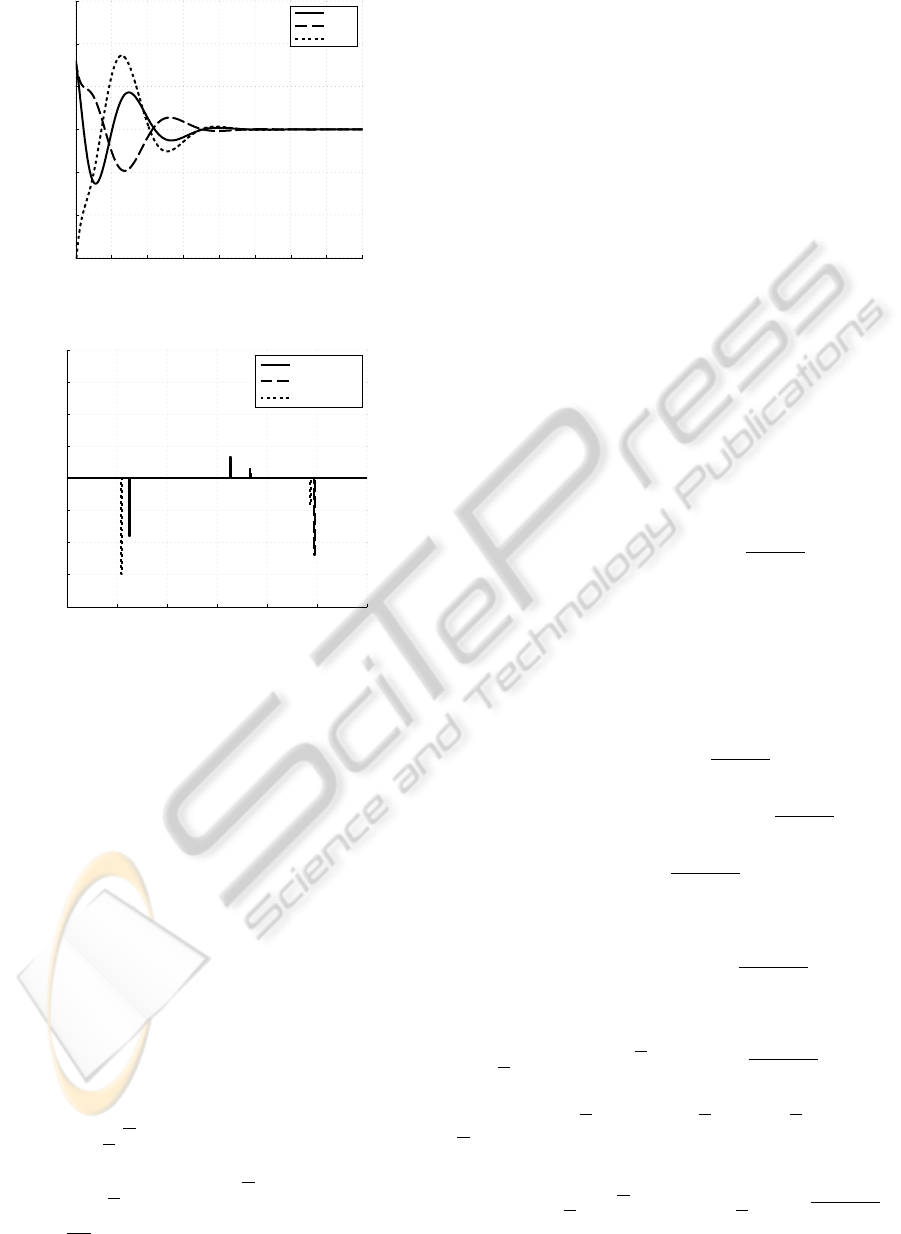
0 1 2 3 4 5 6 7 8
−600
−400
−200
0
200
400
600
Time [s]
Control history [N]
u
f,1
u
f,2
u
f,3
Figure 8: Control actuation of the leader spacecraft.
0 5 10 15 20 25 30
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time [s]
Disturbance [N]
d
l,1
− d
f,1
d
l,2
− d
f,2
d
l,3
− d
f,3
Figure 9: Disturbances acting on the follower spacecraft.
on the leader spacecraft. The control gains have been
chosen based on the Lyapunov analysis. This yields
in general very conservative constraints on the choice
of control gains, and also conservative estimates of
the disturbances the control system is able to handle.
As shown in Figure 4, and in particular Figure 8, this
leads to large transients in the actuation. We stress
that the control gains proposed by this approach is still
much smaller that those obtained through a classical
ISS approach (i.e. relying on the disturbance magni-
tude).
4 PROOF OF THEOREM 1
In view of (Praly and Wang, 1996, Lemma 11) and
(Angeli et al., 2000, Remark 2.4), there exists a con-
tinuously differentiable function V : R
n
→ R
≥0
, class
K
∞
functions α,α and γ, and a positive constant κ
such that, for all x ∈R
n
and all u ∈ R
m
,
α(|x|) ≤V (x) ≤ α(|x|) (30)
∂V
∂x
(x) f (x,u) ≤ −κV (x)+ γ(|u|) . (31)
Let w(t) := V (x(t; x
0
,u)). Then it holds in view of
(31) that
˙w(t) =
˙
V (x(t;x
0
,u))
≤ −κV (x(t; x
0
,u)) + γ(|u(t)|)
≤ −κw(t) + γ(|u(t)|).
In particular, it holds that, for all t ≥ 0,
w(t) ≤ w(0)e
−κt
+
Z
t
0
γ(|u(s)|)ds. (32)
Assuming that u belongs to the class W
γ
(E, T ), for
some arbitrary constants E, T > 0, it follows that
w(T ) ≤w(0)e
−κT
+
Z
T
0
γ(|u(s)|)ds ≤w(0)e
−κT
+E .
Considering this inequality recursively, it follows
that, for each ` ∈ N
≥1
,
w(`T ) ≤ w(0)e
−`κT
+ E
k−1
∑
j=0
e
−jκT
≤ w(0)e
−`κT
+ E
∑
j≥0
e
−jκT
≤ w(0)e
−`κT
+ E
e
κT
e
κT
−1
. (33)
Given any t ≥ 0, pick ` as bt/T c and define t
0
:= t −
`T . Note that t
0
∈ [0,T ]. It follows from (32) that
w(t) ≤w(`T )e
−κt
0
+
Z
t
`T
γ(|u(s)|)ds ≤w(`T )e
−κt
0
+E ,
which, in view of (33), implies that
w(t) ≤
w(0)e
−`κT
+ E
e
κT
e
κT
−1
e
−t
0
+ E
≤ w(0)e
−k(`T +t
0
)
+ E
1 +
e
κT
e
κT
−1
≤ w(0)e
−κt
+
2e
κT
−1
e
κT
−1
E .
Recalling that w(t) = V (x(t; x
0
,u)), it follows that
V (x(t;x
0
,u)) ≤V (x
0
)e
−κt
+
2e
κT
−1
e
κT
−1
E ,
which implies, in view of (30), that
α(|x(t;x
0
,u)|) ≤ α(|x
0
|)e
−κt
+
2e
κT
−1
e
κT
−1
E ,
Recalling that α
−1
(a + b) ≤ α
−1
(2a) + α
−1
(2b) as
α ∈ K
∞
, we finally obtain that, given any x
0
∈ R
n
,
any u ∈ W
γ
(E, T ) and any t ≥ 0,
|x(t;x
0
,u)|≤α
−1
2α(|x
0
|)e
−κt
+α
−1
2E
2e
κT
−1
e
κT
−1
.
(34)
ROBUSTNESS OF ISS SYSTEMS TO INPUTS WITH LIMITED MOVING AVERAGE, WITH APPLICATION TO
SPACECRAFT FORMATIONS
43

Given any T,δ ≥0, the following choice of E:
E(T, δ) ≤
α
(δ)
2
e
κT
−1
2e
κT
−1
. (35)
ensures that
α
−1
2E
2e
κT
−1
e
κT
−1
≤ δ
and the conclusion follows in view of (34) with the
K L function
β(s,t) := α
−1
2α(s)e
−κt
, ∀s,t ≥ 0 .
REFERENCES
Angeli, D. and Ne
ˇ
si
´
c, D. (2001). Power characterizations
of input-to-state stability and integral input-to-state
stability. IEEE Transactions on Automatic Control,
48:1298–1303.
Angeli, D., Sontag, E. D., and Wang, Y. (2000). A char-
acterization of integral input-to-state stability. IEEE
Transactions on Automatic Control, 45:1082–1097.
Berghuis, H. (1993). Model-based Robot Control: from
Theory to Practice. PhD thesis, Universiteit Twente.
Berghuis, H. and Nijmeijer, H. (1993). A passivity approach
to controller-observer design for robots. IEEE Trans-
actions on Robotics and Automation, 9(6):740–754.
Clohessy, W. H. and Wiltshire, R. S. (1960). Terminal
guidance system for satellite rendezvous. Journal of
Aerospace Sciences, 27:9.
Gr
¨
une, L. (2002). Input-to-state dynamical stability and its
Lyapunov function characterization. IEEE Transac-
tions on Automatic Control, 47:1499–1504.
Gr
¨
une, L. (2004). Quantitative aspects of the input-to-
state-stability property. In de Queiroz, M., Malisoff,
M., and Wolenski, P., editors, Optimal Control, Sta-
bilization and Nonsmooth Analysis, pages 215–230.
Springer-Verlag.
Hanslmeier, A., Denkmayr, K., and Weiss, P. (1999).
Longterm prediction of solar activity using the com-
bined method. Solar Physics, 184:213–218.
NASA (1999). On space debris. Technical report, NASA.
ISBN: 92-1-100813-1.
Overhage, C. F. J. and Radford, W. H. (1964). The Lin-
coln Laboratory West Ford Program - An historical
perspective. Proceeding of the IEEE, 52:452–454.
Paden, B. and Panja, R. (1988). Globally asymptotically
stable ’PD+’ controller for robot manipulators. Inter-
national Journal of Control, 47(6):1697–1712.
Ploen, S. R., Scharf, D. P., Hadaegh, F. Y., and Acikmese,
A. B. (2004). Dynamics of earth orbiting formations.
In Proc. of AIAA Guidance, Navigation and Control
Conference.
Praly, L. and Wang, Y. (1996). Stabilization in spite of
matched unmodeled dynamics and an equivalent defi-
nition of input-to-state stability. Mathematics of Con-
trol, Signals, and Systems, 9:1–33.
Sch
¨
afer, F. (2006). The threat of space debris and microm-
eteoroids to spacecraft operations. ERCIM NEWS,
(65):27–29.
Sontag, E. D. (1989). Smooth stabilization implies coprime
factorization. IEEE Transactions on Automatic Con-
trol, 34:435–443.
Sontag, E. D. (1998). Comments on integral variants of ISS.
Systems & Control Letters, 34:93–100.
Sontag, E. D. (2008). Input to state stability: Basic concepts
and results. In Nistri, P. and Stefani, G., editors, Non-
linear and Optimal Control Theory, pages 163–220.
Springer-Verlag, Berlin.
Sontag, E. D. and Wang, Y. (1995). On characterizations of
the input-to-state stability property. Systems & Con-
trol Letters, 24:351–359.
Wertz, J. R., editor (1978). Spacecraft attitude determi-
nation and control. D. Reidel Publishing company.
ISBN: 9027709599.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
44
