
ADAPTIVE FUZZY SLIDING MODE CONTROL FOR UNCERTAIN
NONLINEAR SYSTEMS AGAINST ACTUATOR FAULTS
Meriem Benbrahim, Najib Essounbouli, Abdelaziz Hamzaoui
CReSTIC, Reims University, 9 rue de Quebec B.P. 396, F-10026 Troyes Cedex, France
Ammar Betta
Batna University, 5 rue Chahid boukhlouf, 05000 Batna, Algeria
Keywords:
Fuzzy control, Fault tolerant control, Sliding mode control.
Abstract:
In this paper, we propose to combine the fuzzy sliding mode control to tolerate actuator faults of unknown
nonlinear systems subject to external disturbances. In particular, the idea of using adaptive fuzzy system to
tolerate actuator faults of unknown nonlinear systems by approximating the system functions and the effects
caused by actuator faults are avoided by the control structure. On the basis of Lyapunov stability theory its
shown that the resulting adaptive closed loop system can be guaranteed to be asymptotically stable in the
presence of faults on actuators and disturbances.
1 INTRODUCTION
In most practical control systems, components fail-
ures may occur at uncertain time and the size of
a fault is also unknown. The faults may lead to
performance deterioration or even instability of the
system. Therefore, the study of designing fault-
tolerant control (FTC) systems, which let the systems
operate in safe conditions and with proper perfor-
mances whenever components are healthy or faulted,
has received considerable attention over the past two
decades (Veillette, 1995) (Yang et al., 2001) (Wang.R
et al., 2007) (Liao.F et al., 2002) (Wu and Zhang,
2006) (Zhang et al., 2008) . The existing fault-tolerant
design approaches can be broadly classified into two
groups, namely passive approaches (Zhao and Jiang,
1998) and active approaches (Mao and Jiang, 2007).
In the passive approaches, robust control techniques
are utilized to design a fixed controller for maintain-
ing the acceptable system stability and performances
throughout normal or faulty cases.
Recently, adaptivecontrol has been widely used to
deal with actuator faults in various systems. In (Tao
et al., 2004) (Boskovic et al., 1998), actuator lock-in-
place (stuck at some unknown place) failures were ac-
commodated by adaptive redundant control structure
for linear systems. (Tao et al., 2004) also contains
corresponding studies on some systems with known
nonlinearities. (Tang et al., 2007) extended the re-
sults to MIMO parametric-strict-feedback nonlinear
systems. Loss of actuator effectiveness is considered
in (Ye and Yang, 2006) (Yang and Ye, 2006) for linear
systems in the framework of linear matrix inequality
(LMI) to guarantee not only the stability, but also the
robust performance of the failed system. The com-
mon advantage of these adaptive control approaches
against actuator fault is that they are independent of
fault detection and diagnosis (FDD).
(Boskovic et al., 2005) (Boskovic and Mehra,
2006) developed adaptive flight control based on mul-
tiple model, switching and tuning. However, the
methods mentioned above require that the controlled
system is known or only contains some linear un-
known parameters when there is on fault.
Since it was proved that adaptive fuzzy sys-
tems are universal approximators (Wang and Mendel,
1992), and stable adaptive fuzzy control design was
showed in (Wang, 1994), fuzzy logic systems (FLS)
and neural network (NN) have been used to nonlinear
systems, and also FTC systems. In (Polycarpou and
Helmicki, 1995), a general framework for construct-
ing automated fault diagnosis and accommodation ar-
chitectures was presented using on-line approxima-
tors and adaptive schemes, (Polycarpou et al., 2004)
(Zhang et al., 2004) (Zhang et al., 2006) (Mao et al.,
2006) (Xue and Jiang, 2006) provided several FTC
methods based on fuzzy logic systems (FLSs) or/and
NNs. (Diao and Passino, 2001) and (Rong et al.,
92
Benbrahim M., Essounbouli N., Hamzaoui A. and Betta A. (2010).
ADAPTIVE FUZZY SLIDING MODE CONTROL FOR UNCERTAIN NONLINEAR SYSTEMS AGAINST ACTUATOR FAULTS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 92-97
Copyright
c
SciTePress

2006) applied FTC to practical systems for a turbine
engine and aircraft autolanding respectively. Most of
the existing works on fuzzy or neural networks FTC is
to detection and diagnosis/isolation faults with FLS or
NN. Thus, good fault detection and diagnosis (FDD)
is very important since if there are false or omitted
alarms of the faults, the overall system may even be-
come unstable. In (Ping and Yang, 2008), the au-
thors developed an adaptive FTC approach without
resorting to FDD mechanism to accommodate both
total and partial loss of effectiveness of actuators in
unknown affine nonlinear systems. The main idea is
to introduce adaptive fuzzy systems to tolerate actua-
tor faults of unknown nonlinear systems by approxi-
mating the system functions and the effects caused by
actuator faults are avoided by the control structure.
However, using the projection algorithm need some
knowledge on the system behavior which represents a
restrictive assumption and increases the computation
time. Furthermore, only the free external disturbance
case is treated.
In this paper, we propose an adaptivefuzzy sliding
mode controller to tolerate actuator faults of unknown
nonlinear systems with external disturbances. In The
opposite case of the approaches developed in the lit-
erature, only one fuzzy system is used to approx-
imate the unknown dynamics, which allows avoid-
ing perfectly the controller singularity problem. Top
deal with the external disturbances and the approx-
imation errors, sliding mode technique is adopted.
Hence, the used sliding surface has been modified
such that the approaching phase is removed to over-
come the knowledge of the upper bound of distur-
bances to guarantee the sliding condition and to ef-
ficiently eliminate the chattering phenomenon.
This paper is organized as follows: Section 2 de-
scribes the problem statement. Section 3 is dedicated
to the synthesis of the proposed approach. In section4,
a simulation example demonstrates the effectiveness
of the propose scheme. Finally, section 5 concludes
the paper.
2 PROBLEM STATEMENT
Consider the following nonlinear system with m in-
puts:
˙x
i
= x
i+1
1 ≤ i ≤ n− 1
˙x
n
= f(x) + g
T
(x)u+ d(t)
y = x
1
(1)
where x = [x
1
, x
2
, ...,x
n
]
T
represents the state vec-
tor, u = [u
1
, ....,u
m
]
T
∈ ℜ
m
is the input vector whose
the component may fail during the system operation,
y ∈ ℜ is the output system, g
T
(x) = [g
1
, ....,g
m
] ∈ ℜ
m
and f(x) are unknown continuous nonlinear func-
tions. d is the bounded external disturbance. The
states x
i
(i = 1, ..., n) are measurable and the reference
output y
m
is bounded and sufficiently derivable. this
is a multiple input single output system with all the in-
puts contributed to a common control object like sta-
bilizing the closed loop system, tracking a reference
signal with satisfactory performance of both. There
are many such systems in our real life. The provided
approach is also effective for multi input multi output
systems. We only consider a simple case to simplify
the presentation. The actuator faults considered in this
paper is the loss of effectiveness which is modeled as
follows:
u
i
(t) = ρ
i
ν
i
(t) 1 ≤ i ≤ m
ρ
i
∈ [0, 1]
(2)
ρ
i
is the still effectiveproportion of the i
th
actuator
after losing some effectiveness. When ρ
i
= 1, the cor-
responding actuator is normal (without fault). With
the actuator fault (2), the input vector can be rewrit-
ten as:
u(t) = ρν(t) (3)
where ν(t) = [ν
1
, ...,ν
m
]
T
is the applied control
vector and ρ = diag(ρ
1
, ...,ρ
m
).
The control objective is to design a robust adaptive
fuzzy sliding mode control law for the system (1)
with the actuator fault (2) to ensure that all signals
are bounded in the closed loop and the output y(t)
can track the given reference signal y
r
(t) as closely
as possible despite the presence of uncertainties, ex-
ternal disturbances and actuator faults. From the fault
model (2), it is reasonable that there is at least one ac-
tuator still active for the control purpose. In this case,
we propose to use a proportional actuation structure
as follows (Ping and Yang, 2008):
ν(t) = b ν
0
(t) (4)
where b = [b
1
, ...,b
m
]
T
represents the matrix of pro-
portional actuation and ν
0
(t) the proposed robust
adaptive fuzzy sliding mode control law. Using equa-
tions (3) and (4), the system (1) will be described by:
˙x
i
= x
i+1
1 ≤ i ≤ n− 1
˙x
n
= f(x) + g
T
(x)ρbν
0
(t) + d(t)
y = x
1
(5)
For this, the following assumptions are needed:
Assumption 1. System (1) is constructed such that
despite the loss of actuator effectiveness according to
(2), the system still be forced.

Assumption 2. The external disturbance d(t) is as-
sumed to be bounded, i;e., there exists a positive un-
known constant χ such that: |d| < χ.
The proposed control scheme combines fuzzy
logic for approximation and sliding mode for robust-
ness to attain the control objectives.
3 PROPOSED APPROACH
3.1 Fuzzy Logic System
An fuzzy logic system (FLS) consists of four parts:
the knowledge base, the fuzzifier, the fuzzy inference
engine manipulating fuzzy rules, and the defuzzifier
(Wang, 1994). The knowledge base for the FLS com-
prises a collection of fuzzy IF-THEN rules. The
fuzzifier maps a real point in the input space (mea-
surement of the systems state) to a fuzzy set. In gen-
eral there are two possible choices of this mapping,
namely singleton or non-singleton. In this paper, we
use the singleton fuzzifier mapping. The fuzzy infer-
ence engine performs a mapping from fuzzy sets of
the input to fuzzy sets in the output space, based on
the fuzzy IF-THEN rules (in the fuzzy rule base) and
the compositional rule of inference. The defuzzifier
maps fuzzy sets in the output space to a crisp point
in this space; in this study we use the centre-average
defuzzifier mapping (Wang, 1994).
The output of a multi-input single-output FLS with
centre-average defuzzifier, product inference, and sin-
gleton fuzzifier are of the following form:
y(x) =
m
∑
i=1
y
i
.(
n
∏
j=1
µ
i
(x
j
))
m
∑
i=1
n
∏
j=1
µ
i
(x
j
)
(6)
where µ
i
(x
j
) represents the membership degree of the
input x
j
, y
i
the conclusion constant corresponding to
the i
t
h rule and m the number of used fuzzy rules.
The output of the FLS can be rewritten on the follow-
ing vectorial form (Wang, 1994):
y(x) = ψ
T
φ(x) (7)
where ψ = [y
1
, ...,y
m
]
T
represents the vec-
tor of the adjustable parameters and φ(x) =
[
n
∏
j=1
µ
1
(x
j
)
m
∑
i=1
n
∏
j=1
µ
i
(x
j
)
, ...,
n
∏
j=1
µ
m
(x
j
)
m
∑
i=1
n
∏
j=1
µ
i
(x
j
)
]
T
the regressor vec-
tor.
According to the universal approximation theorem
(Wang, 1994), there exists an optimal fuzzy system
in the form (5) such it approximates uniformally an
unknown continuous function h(x) on a compact set
for any approximation accuracy:
h(x) = ψ
∗T
φ(x) + ε (8)
where ε is a very small positive constant.
3.2 Sliding Mode Control
To attain the desired objectives, we propose to use a
sliding mode control. This choice is motivated by the
fact that sliding mode allows to maintain the tracking
performancesin presence of both structural uncertain-
ties and external disturbances (Slotine and Li, 1991).
For this, we consider the following sliding surface:
S(t) = e
(n−1)
(t) +
n−1
∑
i=1
λ
i−1
e
(i−1)
(t) (9)
where e(t) = y
r
(t) − y(t) denotes the tracking er-
ror and e
(i)
(t) its i
th
time derivative. The constants λ
i
are chosen such the corresponding polynomial roots
are stable (Slotine and Li, 1991). Using the sliding
surface S(t) in this actual form presents two major
drawbacks: (i) during the reaching phase, the system
is sensitive to uncertainties and external disturbances,
which provokes chattering phenomenon in the neigh-
borhood of the sliding surface. (ii) Choosing big val-
ues of the slops which allows reducing the reaching
phase but requires an important starting energy, and
small values give a slow response. So, it is necessary
to find a trade-off between the starting energy and the
time response (Hussain et al., 2010). To overcome
this problem, we propose to use a modified the slid-
ing surface allowing to suppress the reaching phase,
and hence the system will be at t = 0 on the surface
(S(t) = 0). In this case, the sliding surface will be
defined as follows:
S(t) = e
(n−1)
(t) +
n−1
∑
i=1
λ
i−1
e
(i−1)
(t)
−
2
π
π
2
− arctg(t)
e
(n−1)
+
n−1
∑
i=1
λ
i−1
e
(i−1)
(0)
= e
(n−1)
(t) +
n−1
∑
i=1
λ
i−1
e
(i−1)
(t) + S
0
(10)
If f (x) and [g
T
(x)ρb] are well known, the control
law can be given as:
ν
0
= [g
T
(x)ρb]
−1
− f(x) + y
(n)
r
+
n−1
∑
i=1
λ
i−1
e
(i)
(t)
+[g
T
(x)ρb]
−1
[k
d
sign(S(t)]
(11)
Where k
d
is a positive constant chosen such that:
S(t).
˙
S(t) < 0.
However, the dynamics of the system studied in
our paper are unknown which makes the use of this
control law impossible. To resolve this problem, one
can use direct adaptive fuzzy controller or an indirect
adaptive fuzzy controller. In the direct scheme, the
control law is approximated by a fuzzy system. How-
ever, the control gain must be constant or satisfying
some restrictive assumptions. The indirect scheme
consists in approximating the unknown dynamics by
two fuzzy systems to synthesize the control law. Nev-
ertheless, the used adaptation laws are very compli-
cated to avoid the singularity problem. In this work,
we propose to approximate the unknown terms using
only one fuzzy system under the constraint that the ro-
bustness of the closed loop system is guaranteed and
the number of the involved parameters in the control
design is reduced.
3.3 Control Law Synthesis
This section is dedicated to the synthesis of the pro-
posed approach.
Using (5), the time derivative of the sliding surface
(10) is given by:
˙
S(t)= e
(n)
+
n−1
∑
i=1
λ
i−1
e
(i)
(t)
˙
S(t)= y
(n)
r
− f (x) − [g
T
(x)ρb]ν
0
− d +
n−1
∑
i=1
λ
i−1
e
(i)
(t)
(12)
If we muster all the unknown parameters in one, the
above expression can be rewritten as:
˙
S(t) = y
(n)
r
− f
d
(x) − [g
T
(x)ρb]ν
0
(13)
where f
d
(x) = f(x) + d −
n−1
∑
i=1
λ
i−1
e
(i)
(t).
According to assumption 1, we have [g
T
(x)ρb] 6=
0. So, it can be positive or negative. We assume in
this work, that there exists a positive constant g
0
such
that: [g
T
(x)ρb] > g
0
> 0. Furthermore, the function
f
d
(x) is unknown. To attain the control objectives, we
propose to use a fuzzy system ψ
T
φ(x) to approximate.
We define a new variable α such that: α = g
−1
0
kψk
2
.
According to (8), and the approximation error as:
˜
α =
α−
ˆ
α whose time derivative is given by:
˙
˜
α = −
˙
ˆ
α
Proposition The control law
ν
0
= M
0
.S(t) +
ˆ
α
2β
2
φ(x)
T
φ(x)S(t) (14)
with
˙
ˆ
α =
γ
2.β
2
φ(x)
T
φ(x)S(t) (15)
guarantees the stability and the robustness of the
closed loop system in presence of actuators faults.
It ensures also the boundedness of all the involved
signals.
Proof.
According to (8), (13) and (14), using the fact that the
reference signal y
(n)
r
yields to:
S(t)
˙
S(t) ≤
g
0
α
2β
2
φ(x)
T
φ(x)S
2
(t) +
β
2
2
+
g
0
.S
2
(t)
η
2
+
η
2
(ε
2
+χ
2
)
2g
0
− [g
T
(x)ρb]ν
0
(16)
Where η and χ two positive constants.
To prove the stability, we consider the following Lya-
punov function:
V
L
=
1
2
S
2
(t) +
g
0
2β
˜
α
2
(17)
Using equations (15) and (16), the time derivative of
(17) becomes:
˙
V
L
≤
1
2
h
β
2
+
η
2
(ε
2
+χ
2
)
g
0
− g
0
σα
2
i
+
h
−2g
0
M
0
S
2
(t)
2
− g
0
ησ
˜
α
2
2
i
(18)
Let a
0
=
1
2
h
β
2
+
η
2
(ε
2
+χ
2
)
g
0
− g
0
σα
2
i
and b
0
=
min(2g
0
M
0
, ησ). Then, the time derivative of V
L
is
given by:
˙
V
L
≤ a
0
+ b
0
V
L
(0) (19)
which implies
V
L
(t) ≤ V
L
(0)exp(a
0
t) +
b
0
a
0
∀t ≥ 0
(20)
Hence, the Lyapunov function converges toward a
bounded value
b
0
a
0
. This implies that all the involved
signals are bounded. Furthermore, we can have
lim
t→∞
S(t) ≤ 2
b
0
a
0
, which ensures the convergence of the
tracking error to zero (Wang, 1994).
4 SIMULATION AND RESULTS
In this section, the presented adaptive fuzzy fault
tolerant controller is applied to a nonlinear system
with the actuator faults described as (2).
Example: We consider that after transformation,
the nonlinear system can be written as the following
form which has a redundancy actuation structure.
˙x
1
= x
2
˙x
2
=
5sinx
1
−0.02x
2
2
cos(x
1
)sin(x
1
)
3−0.2cos
2
x
1
+
cos
2
x
1
3−0.2cos
2
x
1
u
1
+
2cos
2
x
1
3−0.2cos
2
x
1
u
2
+ d
(21)
Where the actuators of u
1
and u
2
are the con-
trol inputs, d = 0.1sin(2t) represents the external dis-
turbance. The evolution of the actuators effective-
ness ρ = diag(ρ
1
, ρ
2
) is given by figure (1). In or-
der to control system (21), the proposed control law
is applied with the following simulation parameters:
m = 5× 5 = 25 rules for the fuzzy logic system, with
ρ = 0.01, γ = 4.250 and initial values α = 0
25
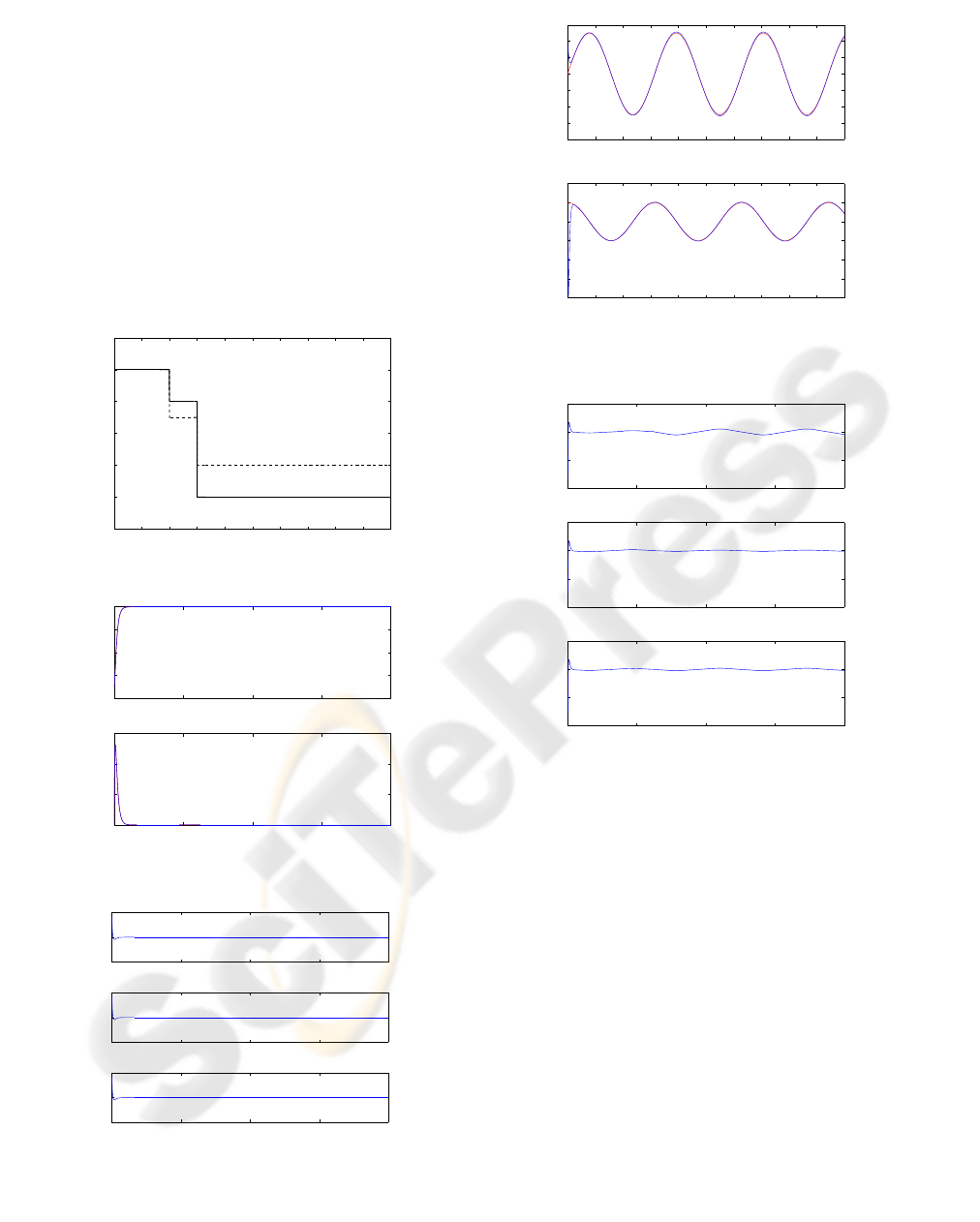
. Fig-
ures 2 and 3 give the simulation results for regula-
tion problem and 4-5 those of tracking of a sinusoidal
reference signal. We can see the convergence of the
states to their respective reference signals despite the
presence of both effectiveness loss (figure 1) and ex-
ternal disturbances.
0 2 4 6 8 10 12 14 16 18 20
0
0.2
0.4
0.6
0.8
1
Time (s)
Figure 1: Evolution of the effectiveness: (–): ρ
1
, (- -): ρ
2
.
0 5 10 15 20
−0.4
−0.3
−0.2
−0.1
0
Time(s)
y(t)
0 5 10 15 20
0
0.5
1
1.5
Time(s)
dy(t)/dt
Figure 2: Evolution of the state variables.
0 5 10 15 20
−100
0
100
Time(s)
Applied control v
0 5 10 15 20
−50
0
50
Time(s)
u
1
0 5 10 15 20
−50
0
50
Time(s)
u
2
Figure 3: Control signals.
0 2 4 6 8 10 12 14 16 18 20
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Time(s)
y(t)
0 2 4 6 8 10 12 14 16 18 20
−2
−1.5
−1
−0.5
0
0.5
1
Time(s)
dy(t)/dt
Figure 4: Evolution of the state variables and their reference
signals.
0 5 10 15 20
−200
−100
0
100
Applied control v
Time(s)
0 5 10 15 20
−100
−50
0
50
Time(s)
u
1
0 5 10 15 20
−100
−50
0
50
Time(s)
u
2
Figure 5: Control signals: ν u
1
and u
2
.
5 CONCLUSIONS
In this paper, a fuzzy sliding mode approach of fault
tolerant control problem for an uncertain perturbed
nonlinear system is studied. To overcomethe problem
of unknown dynamics, only one adaptive fuzzy sys-
tem has been used. Furthermore, the sliding surface
has been modified to suppress the reaching phase and
hence improve the robustness of the closed loop sys-
tem. The global stability has been established in the
sense of Lyapunov. Many simulations have presented
to show the good performances despite the presence
of actuator failures. As future work, the case of actu-
ator lock-in-place will be also treated and the exten-
sion of this approach to multi-input multi-output will
be studied.

ACKNOWLEDGEMENTS
This work is developedfor the project CPER-MOSYP
and supported by both the Champagne-Adrdenne Re-
gion and the European found FEDER.
REFERENCES
Boskovic, J., Bergstrom, S., and Mehra, R. (2005). Adap-
tive accommodation of failures in second-order flight
control actuators with measurable rates. In American
Control Conference.
Boskovic, J. and Mehra, R. (2006). A multiple model-based
decentralized system for accommodation of failures
in second-order flight control actuators. In American
Control Conference.
Boskovic, J., Yu, S., and Mehra, R. (1998). A stable scheme
for automatic control reconfiguration in the presence
of actuator failures. In American Control Conference.
New york:IEEE Press.
Diao, Y. and Passino, K. (2001). Stable fault-tolerant adap-
tive fuzzy/neural control for a turbine engine. IEEE
Transactions on Control Systems Technology.
Hussain, A., Essounbouli, N., and Hamzaoui, A. (2010).
A robust adaptive fuzzy wavelet network based con-
troller for a class of nonlinear systems. American Con-
trol Conference Westin Seattle Hotel, Seattle, Wash-
ington, USA.
Liao.F, .Wang, J., and Yang, G. (2002). Reliable robust
flight tracking control: an lmi approach. IEEE Trans-
actions on Control Systems Technology.
Mao, Z. and Jiang, B. (2007). Fault estimation and accom-
modation for networked control systems with transfer
delay. Acta Automatica Sinica.
Mao, Z., Jiang, B., and Chowdhury, F. (2006). Fault ac-
commodation for a class of nonlinear flilght control
systems. International Symposium on Systems and
Control in Aerospace and Astronautics.
Ping, L. and Yang, G.-H. (2008). Fault tolerant control for
unknown nonlinear systems with actuator failures: An
adaptive fuzzy approach. American Control Confer-
ence Westin Seattle Hotel, Seattle, Washington, USA.
Polycarpou, M. and Helmicki, A. (1995). Automated fault
detection and accommodation: a learning systems ap-
proach. IEEE Transactions on Systems, Man, and Cy-
bernetics.
Polycarpou, M., Zhang, X., Xu, R., Yang, Y., and Kwan, C.
(2004). A neural network based approach to adaptive
fault tolerant flight control. In TEMPLATE’06, 1st In-
ternational Conference on Template Production.
Rong, H. J., Huang, G. B., Sundararajan, N., and Saratchan-
dran, P. (2006). Fuzzy fault tolerant controller for ac-
tuator failures during aircraft autolanding. IEEE In-
ternational Conference on fuzzy systems.
Slotine, J. and Li, W. (1991). Applied Nonlinear Control.
Englewood Cliffs Prentice Hall, New Jersey.
Tang, X., Tao, G., and Joshi, S. (2007). Adaptive actua-
tor failure compensation for nonlinear mimo systems
with an aircraft control application. Automatica.
Tao, G., Chen, S., Tang, X., and al (2004). Adaptive Control
of Systems with Actuator Failures. Springer-Verlag,
Berlin.
Veillette, R. (1995). Reliable linear-quadratic state-
feedback control. Automatica.
Wang, L. (1994). Adaptive fuzzy systems and control. En-
glewood Cliffs NJ: Prentice Hall, New Jersey.
Wang, L. and Mendel, J. (1992). Fuzzy basis functions,
universal approximation, and orthogonal least-squares
learning. IEEE Transactions on Neural Networks.
Wang.R, Jin, G., and Zhao, J. (2007). Robust fault-tolerant
control for a class of switched nonlinear systems in
lower triangular form. Asian Journal of Control.
Wu, H. and Zhang, H. (2006). Reliable hinf fuzzy control
for continuous-time nonlinear systems with actuator
failures. IEEE Transactions on Fuzzy Systems.
Xue, H. and Jiang, J. (2006). Fault detection and accommo-
dation for nonlinear systems using fuzzy neural net-
works. IEEE 5th International Power Electronics and
Motion Control Conference.
Yang, G., Wang, J., and Soh, Y. (2001). Reliable hinf con-
troller design for linear systems. Automatica.
Yang, G. and Ye, D. (2006). Adaptive fault-tolerant hinf
control via state feedback for linear systems against
actuator faults. In 45th IEEE Conference on Decision
and Control.
Ye, D. and Yang, G. (2006). Adaptive fault-tolerant track-
ing control against actuator faults with application to
flight control. IEEE Transactions on Control Systems
Technology.
Zhang, D., Wang, Z., and Hu, S. (2008). Robust satisfac-
tory fault tolerant control of uncertain linear discrete-
time systems:an lmi approach. International Journal
of Systems Science.
Zhang, X., Liu, Y., Rysdyk, R., Kwan, C., and Xu, R.
(2006). An intelligent hierarchical approach to ac-
tuator fault diagnosis and accommodation. IEEE
Aerospace Conference.
Zhang, X. D., Parisini, T., and Polycarpou, M. M. (2004).
Adaptive fault-tolerant control of nonlinear uncertain
systems: an information-based diagnostic approach.
IEEE Transactions on Automatic Control.
Zhao, Q. and Jiang, J. (1998). Reliable state feedback con-
trol system design against actuator failures. Automat-
ica.
