
STEREO VISION BASED VEHICLE DETECTION
Benjamin Kormann, Antje Neve, Gudrun Klinker and Walter Stechele
BMW Group Research and Technology, Vehicle Sensors and Perception Systems, Hanauerstr. 46, Munich, Germany
Technische Universit
¨
at M
¨
unchen, Boltzmannstr. 15, Garching, Germany
Keywords:
Stereo vision, Vehicle detection, GPS evaluation.
Abstract:
This paper describes a vehicle detection method using 3D data derived from a disparity map available in real-
time. The integration of a flat road model reduces the search space in all dimensions. Inclination changes
are considered for the road model update. The vehicles, modeled as a cuboid, are detected in an iterative
refinement process for hypotheses generation on the 3D data. The detection of a vehicle is performed by a
mean-shift clustering of plane fitted segments potentially belonging together in a first step. In the second step
a u/v-disparity approach generates vehicle hypotheses covering differently appearing vehicles. The system
was evaluated in real-traffic-scenes using a GPS system.
1 INTRODUCTION
The automobile industry has been facing many chal-
lenging tasks for years. Motor vehicle manufactur-
ers and component suppliers have constantly enriched
the driving comfort of today’s vehicles over the last
decades and have made them more secure, with appli-
cations like Damper Force Control (DFC) or Dynamic
Stability Control (DSC).
Adaptive Cruise Control (ACC) uses a typical ra-
dio detection and ranging (Radar) based driving assis-
tance system, which measures the distance and speed
obstacles by a Doppler frequency shift. Radar proved
to be a suitable sensor for applications needing dis-
tance information. Some applications like Lane De-
parture Warning or Traffic Sign Detection use cam-
eras, because Radar cannot interpret visual data. Be-
cause a high number of applications per sensor is de-
sired, it is worth trying to have cameras perform ACC
by scanning and analyzing the surrounding environ-
ment.
The entire infrastructure of traffic guidance is de-
signed for visual perception, and therefore it is obvi-
ous to evaluate a vision-based ACC approach. The
drawback of a single-camera system is the loss of
depth, because only a projection of the scene is cap-
tured. A stereo vision system, containing two cam-
eras, overcomes this drawback. Much like how hu-
mans who retrieve 3D information with two eyes, a
stereo machine vision can reconstruct the 3D world
with two cameras.
This work provides an analysis of whether the
higher costs of two cameras are worth the expense
compared to value that the higher number of appli-
cations the system can cover.
This paper is organized as follows: first an
overview of previous work will be given in section 2,
then we will describe the iteratively refining vehicle
detection process in section 3. Section 4 evaluates the
implemented system and provides a conclusion of this
paper.
2 PREVIOUS WORK
Bertozzi et al. perform vehicle detection on a stereo
vision-based system (Bertozzi et al., 2000). They try
to identify vehicles due to their symmetry in single
images. The symmetry is determined on horizontal
and vertical edges with a threshold. Such a symmetry
map describes the degree of symmetry by its pixel in-
tensities and the width of the symmetric object by its
spread along the ordinate. The stereo system is only
used to refine the initially estimated distance of the
input images. This system does not operate on real
3D data producible by stereo systems and does not
exploit the complete stereo performance.
Foggia et al. propose a stereo vision approach
in combination with optical flow to extract their own
431
Kormann B., Neve A., Klinker G. and Stechele W. (2010).
STEREO VISION BASED VEHICLE DETECTION.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 431-438
DOI: 10.5220/0002847004310438
Copyright
c
SciTePress

movement (Pasquale Foggia et al., 2005). The dispar-
ity map is resampled and quantified according to the
resolution of the optical flow. The displacement of
each point in the disparity map in adjacent frames can
be predicted, if the camera motion is known. In case
a point belongs to a moving object, the observed mo-
tion vector differs from the predicted and if it exceeds
a threshold, a blob detection is used to combine the
connected components. This approach was applied
to synthetic scene data generated by a rendering soft-
ware, but it doesn’t provide performance information
on vehicle detection.
Toulminet et al. extract obstacle features out of
a feature-based sparse disparity map by bidirectional
edge matching (Gwenaelle Toulminet et al., 2006).
The connected 3D points of an object in the scene
are back projected, where a connecting, depth and
uniqueness criteria is applied. A v-disparity map
in combination with a Hough transform determines
the road plane and obstacles are detected due to a
threshold comparison of the disparities with respect
to the road. Vehicle hypotheses are generated simi-
lar to (Bertozzi et al., 2000) by the generation of a
symmetry map. For each candidate a bounding box is
created by a pattern matching for the detection of the
lower vehicle part.
Obstacle detection on disparity images is pro-
posed by Huang et al. (Huang et al., 2005). They
segment the disparity image in different layered im-
ages at several disparities along with a certain offset.
The selection of the disparities is unknown a priori,
because it can slice vehicles in parts and return any
nearby merged object. Since linear relationship be-
tween the disparity and the depth doesn’t have to be
given, depending on the rectification procedure, the
computed offset would have to be depth dependent.
Labayrade et al. perform obstacle detection on
u/v-disparity maps (Labayrade et al., 2002). They
noticed that objects expanding in viewing depth di-
rection project a linear curve, a diagonal line respec-
tively in the v-disparity image. The intersection of
this curve and vertical lines represent the tangency of
an obstacle with the road. Additionally, they adapt
the road profile by an evaluation of two consecutive
v-disparity maps. The vehicle detection solely rely-
ing on u/v-disparity maps is likely to fail, because
the possible measurement failure in disparity compu-
tations is further integrated in these maps, see also
section 3.1.3.
Applications in the automotive environment de-
mand a robust and reliable rate of success in all cases.
If a million vehicles are sold in dozens of countries
every year with an installed sensor along with its ap-
plication, the environments will be dissimilar to each
Images
Hypotheses Generation
Hypotheses Verification
Object List
PreProcessing
Refinement
Hypotheses
Scene Objects
Augmentation
Figure 1: Two stage iterative refinement approach.
other. Neither the shape nor the color of any appear-
ing object is completely predictable, but the applica-
tion must be self-adaptive and reliable in all situations
in the present and the future. It also may not be for-
gotten that the needed sensors must be low priced and
satisfy high quality criteria like durability, stability in
realistic temperature ranges.
3 VEHICLE DETECTION
The difficulty of object detection is mostly not the ob-
ject detection process itself, but rather the influence of
the environment on the appearance. In urban traffic
scenarios there exist many uncertain background ob-
jects that distract the detection process from a proper
mode of operation. Additionally, the camera itself
travels through the environment, such that static ob-
jects move along the inverse direction of the camera
and objects at the same speed appear to be constant.
This work proposes a two stage iterative refine-
ment for vehicle hypotheses generation. The under-
lying vehicle model taken for detection purpose is a
cubical shape contour. This approximation is suitable
for most vehicle types and is also often used for occlu-
sion handling (Pang et al., 2004; Chang et al., 2005).
Figure 1 illustrates the iterative approach, whose com-
ponents are further described in the following sec-
tions.
3.1 Hypotheses Generation
A vehicle appearance depends on its pose, as it re-
sides in the real world with respect to the camera sys-
tem. Additionally, vehicles tend to be different from
the point of view in color or shape. The complex en-
vironment complicates the vision-based recognition
process since there are many objects that are not of
interest like trees, traffic signs, or bicycles which may
cause intensity variations due to occlusion and shad-
ing. Because of all these possible influences, vehicle
candidates are extracted from the image as hypothe-
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
432
ses. Since vision-based vehicle detection has received
a lot of attention for traffic surveys or driver assis-
tance, many methods emerged for hypothesis gener-
ation, and they can be classified into the three cate-
gories knowledge-, stereo- and flow-based (Sun et al.,
2006).
This work evaluates the Standardized Stereo Ap-
proach and generates vehicle hypotheses from 3D
data retrieved by the disparity map, which is available
in real-time since its computation is implemented in
hardware. The iterative two stage model is applied to
3D data.
3.1.1 Assumption
As stated before, a vehicle is modeled as a cuboid
scalable in width, length, and height. A natural scene
may contain many objects following this model like
buildings, road side advertisement, or road signs,
which may lead to many false hypotheses. Moreover,
the search space is tremendously high if there is no
restriction on possible vehicle positions or on the ob-
ject dimension. Since all vehicles to be detected are
approximately on the same altitude with respect to the
road, the search complexity can be reduced assuming
that all four vehicle sides are orthogonal to it. This
requires a road model, which represents the actual
course of the road.
This approach uses a flat road assumption, be-
cause it is sufficient for most cases like urban or
highway traffic (Hong Wang, 2006), (Huang et al.,
2005), (Sergiu Nedevschi et al., 2004), (Gwenaelle
Toulminet et al., 2006), Labayrade (Labayrade et al.,
2002) considers a flat and non-flat road geometry.
3.1.2 Stage 1 of Hypotheses Generation
In the first hypotheses generation stage, an instance
of the cubic model must be created for each possible
vehicle candidate in the scene. Despite of the fact a
cuboid has six facets, only three of them can at most
be captured by the stereo system. It will seldom be
the case, that the front or rear, lateral and top side of
a vehicle may be visible in an image.
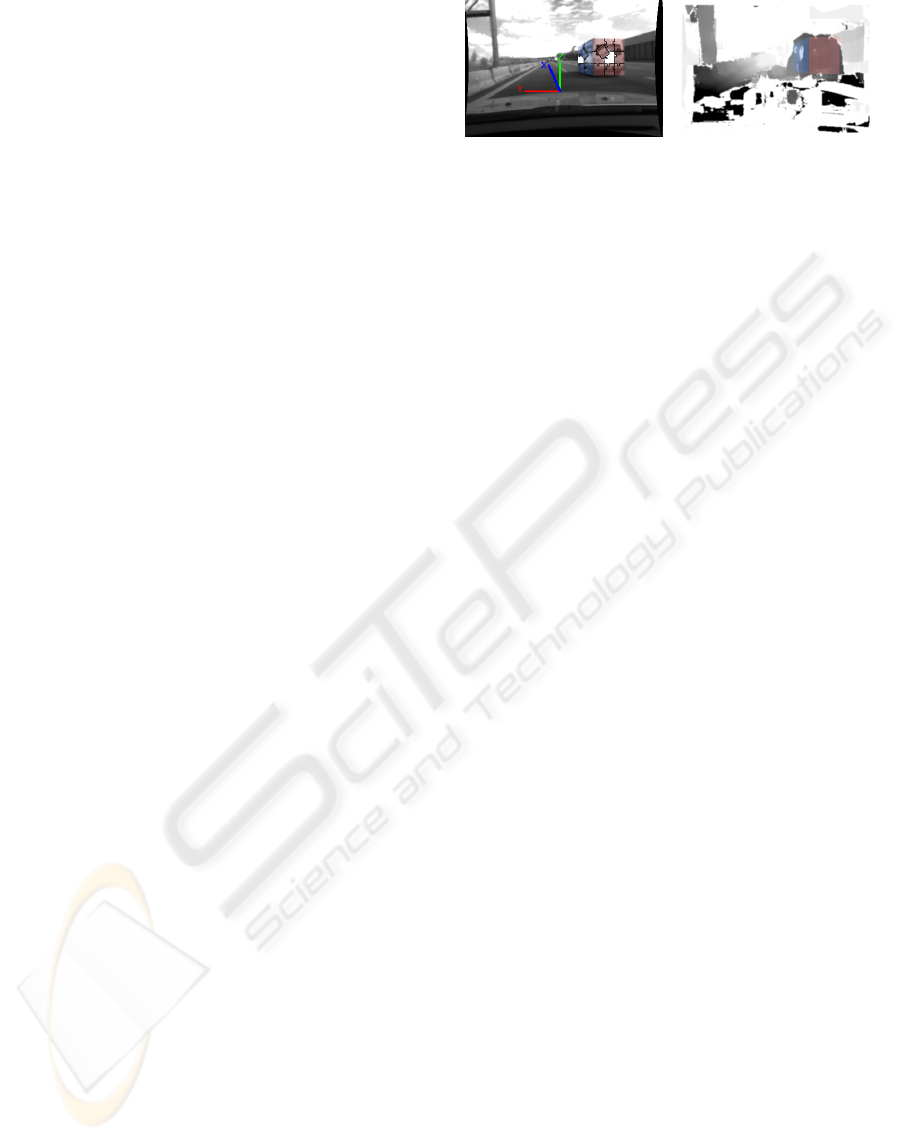
The Summed Absolute Differences (SAD) dispar-
ity map in figure 2(b) shows a vehicle with two visible
facets, where bright points represent small absolute
disparity values, which means the object is further
away, and dark points represent high absolute dispar-
ity values, which means the object is close by. The
white spots in the disparity map are regions out of
domain meaning that no disparity value could be es-
tablished. If not explicitly stated otherwise this work
considers large disparities as large absolute disparity
values, thus close objects.
(a) Jigsaw pieces of a vehi-
cle
(b) Vehicle boundary in dis-
parity map
Figure 2: A vehicle reassembled by its pieces of a puzzle.
Pre-selection. In a first step the 3D data returned by
the stereo sensor must be processed to discriminate
objects from the background.
The region growing partitioning technique uses
a measure among pixels in the same neighborhood,
which tend to have similar statistical properties and
can therefore be grouped into regions. If adjacent re-
gions have significantly different values with respect
to the characteristics on which they are compared to,
the similar interconnected pixels can reliably be re-
turned as regions.
The similarity is measured on the absolute differ-
ence of the gray values g, which represent disparity
values. The image is rastered into rectangles of size
m × n (here: 7 × 7). The values of the center points
c
i
and c
j
the so called seed points of two adjacent
rectangles are compared and the regions are merged
if equation (1) is satisfied. The threshold t
f ix
is taken
for all rectangles across the image.
|g(c
1
) −g(c
2
)| < t
f ix
(1)
This so called region growing technique is used
for segmentation on the disparity map. In this set of
regions, foreground and background assignments are
mixed. These regions will be called segments from
now on.
Filtering. First this filtering step processes the seg-
ment data globally, so that all 3D point locations are
compared to the road. The street may contain irrele-
vant objects like wheel traces or green spaces on the
road side. These features can be excluded from the
3D data by a restriction on the lowest point relative
to the road profile. Furthermore, a maximum height
as an upper filtering bound may exclude traffic signs
higher than the highest expected vehicle.
A dataset can include random measurement errors
or systematic measurement errors caused by a wrong
calibration or wrongly scaled data. The 3D data of
each segment spreads along each dimension, but es-
pecially the depth tolerance is high. A typical char-
acteristic of an outlier is the exorbitant deviation to
all other data points of the segment. Such a deviation
STEREO VISION BASED VEHICLE DETECTION
433

can statistically be expressed by the 2σ rule (Thomas
A. Runkler, 2000). A 3D point P
k
of a segment S is
classified as outlier, if at least one component (x, y,
z) deviates more than twice the standard deviation σ
from the mean P. The identified outliers of each seg-
ment may now be processed. Runkler proposes the re-
moval of an outlier among other approaches (Thomas
A. Runkler, 2000).
Fitting. The disparity map has now been processed
so that only those segments remain that can possibly
belong to a vehicle. The points within each segment
may never be perfectly coplanar, not even after the
previous filtering step. The best solution utilizes the
linear algebra factorization Singular Value Decompo-
sition (SVD). Equation (2) shows the matrix A which
holds all m points of segment S and the vector B con-
tains the plane coefficients in the linear system of
equations. If a point lies in a plane the product of
the coordinates and the plane equation must be zero.
A ·B = 0,
x
1
y
1
z
1
1
x
2
y
2
z
2
1
.
.
.
.
.
.
.
.
.
.
.
.
x
m
y
m
z
m
1
·
a
b
c
d
= 0 (2)
The singular value decomposition of the non-
square matrix A solves the overdetermined system
of equations and returns the coefficients of the fitted
plane. The matrix A is an m × n matrix with m ≥ n
and can be factored to A = U DV
T
, where U is an
m × n matrix with orthogonal columns, D is an n × n
diagonal matrix and V is an n × n orthogonal ma-
trix (Richard Hartley and Andrew Zisserman, 2003).
The diagonal matrix D contains non-negative singu-
lar values in descending order. The column points in
V of the smallest corresponding singular value repre-
sents the solution.
The next paragraph explains how the segments are
taken together with its fitted planes to merge them into
to the cubic vehicle facets.
Clustering. Although all segments have an orienta-
tion due to the fitted plane and a vehicle model facet
with the same outer orientation could be instanced,
the segments cannot be merged primitively from their
normal vectors. A na
¨
ıve combination of the segments
without any consideration of their position, orienta-
tion and density may cause false assignments and lead
to system failures.
The Mean-Shift procedure allows clustering on
high dimensional data without the knowledge of the
expected clusters and it doesn’t constrain the shape
of the clusters. Comaniciu and Meer use the mean-
shift procedure for feature space analysis (Dorin Co-
maniciu and Peter Meer, 1998), (Dorin Comaniciu
and Peter Meer, 2002). The mean-shift is formally
defined as follows. The p dimensional data points
s
i
, i = 1, . . . , n ∈ R
p
and a multivariate kernel den-
sity estimate with the kernel K(s) in combination with
the window radius h are given, see equation (3). The
modes of the density function can be found where the
gradient becomes zero 5 f (s) = 0. The first term of
equation (4) is proportional to the density estimate
with a radially symmetric kernel K(s) = c
k,p
k(ksk
2
)
and its profile k, where c
k,p
ensures that K integrates
to 1. Assuming that the derivative of the kernel profile
exists, the function g(s) = −k
0
(s) replaces the previ-
ous kernel by G(s) = c
k,p
g(ksk
2
).
f (s) =
1
nh
p
n
∑
i=1
K
s − s
i
h
(3)
5 f (s) =
2c
k,p
nh
p+2
"
n
∑
i=1
g
s − s
i
h
2
!#
· m
h,G(s)
(4)
The second term is the so called mean-shift:
m
h,G(s)
=
∑
n
i=1
s
i
g
k
s−s
i
h
k
2
∑
n
i=1
g
k
s−s
i
h
k
2
− s (5)
After the data has been standardized it can be clus-
tered by mean-shift. The approach in (Chang et al.,
2005) is based on a template matching method for a
generic vehicle, while the approach shown here fo-
cuses on a cuboid model of vehicles fitted by planes.
The mean-shift algorithm is used for peak detection
in 2D score images of the matching procedure, while
here it is applied to 6D data for vehicle side candidates
retrieval.
Figure 3(b) shows the clustering result in the 3D
view. The two black points of the huge scatter cloud
on the right side represent the center of the bounding
planes of the truck visible in the disparity image in
figure 3(a).
(a) Disparity image contain-
ing a truck
(b) Black points are the clus-
tering result
Figure 3: The clustering result of all segments.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
434

Assembling. A set of planes needs to be processed
after the clustering. It depends on the position and
orientation of the planes, whether they belong to one
common vehicle or not. Since the road profile is con-
sidered to ease the detection process by a restriction
of the search space, the relative height of all planes
may be evaluated prior to the assembly to exclude
non-vehicle features. The striking argument whether
two planes are candidates to be assembled is the dis-
tance of the center points. If this distance is roughly
half the width, the planes get assembled. Two planes
in 3 dimensional space intersect in a line if they aren’t
parallel. The planes π
1
: a
1
x + b
1
y + c
1
z + d
1
= 0
and π
2
: a
2
x + b
2
y + c
2
z + d
2
= 0 with (a
1
, b
1
, c
1
)
T
6k
(a
2
, b
2
, c
2
)
T
will intersect in a line.
All assembled planes have instanced a vehicle
model with all parameters, as there are center point,
width, height and length. All other remaining planes
that could not be merged with others are candidates
for partially visible vehicles. This missing informa-
tion must be looked up in a ratio table of common
vehicle dimensions.
3.1.3 Stage 2 of Hypotheses Generation
In the second stage those vehicles should be identi-
fied, which couldn’t be covered by the first stage. The
quality of the result of the first stage may be affected
negatively by the region growing response.
Figure 4(a) slightly merges three far distant vehi-
cles indicated by the yellow regions in the center of
the image surrounded by the red circle. Another neg-
ative effect of the region growing is demonstrated in
figure 4(b). The vehicle on the left side is visible from
the rear-end and the right side in the reference image.
(a) Merged regions of far
distant vehicles
(b) Two vehicle boundaries
merged as one region
Figure 4: Drawbacks of the region growing in stage 1.
U/V-Disparity. The u/v-disparity approach exploits
the information in the disparity map. V-disparity im-
ages are sometimes also used to estimate the road
profile (Labayrade et al., 2002). Formally the com-
putation of the v-disparity image can be regarded
as a function H on the disparity map D such that
H(D) = D
v
. H accumulates the points in the disparity
map with the same disparity value d row-by-row. The
abscissa u
p
of a point p in the v-disparity image cor-
responds to the disparity value d
p
and its gray value
g(d
p
) := r
p
to the number of points with the same dis-
parity in row r:
r
p
=
∑
P∈D
δ
v
P
,r
· δ
d
P
,d
p
(6)
The Kronecker delta δ
i, j
is defined as follows:
δ
i, j
=
(
1 for i = j
0 for i 6= j
(7)
After the disparity map has been processed for all
rows, the v-disparity image is constructed. The com-
putation of the u-disparity image is done analogously
column-wise instead of row-wise. Vertical straight
curves in the v-disparity image refer to points at the
same distance over a certain height. The upper and
lower curve delimiting points indicate a depth discon-
tinuity and may therefore represent a boundary of an
object in the image. A linear curve in the u-disparity
image utilizes the transverse depth discontinuities of
an object just as well. The intersection of the corre-
sponding back projected curve ranges deliver objects
lying frontoparallel relative to the camera. The selec-
tion of these features for vehicle detection is further
explained in the next paragraph.
Selection. Since these images localize regions in
the image whose 3D representative has a fixed dis-
tance to the camera, the second stage will take care of
unidentified vehicles visible by its rear-end side. The
issue of interconnected regions in figure 4(a) due to
the satisfying similarity tolerance in the region grow-
ing process can be solved. The yellow regions sym-
bolize three far distant vehicles. Figure 5 shows the
3D view of such a situation with three spatially close
vehicles. These vehicles will appear as a linear curve
in the v-disparity image, since they are approximately
projected in the same range of rows. They will also
imply a horizontal line segment in the u-disparity im-
age, but at different frequencies, because less dispar-
ity values are present between the vehicles.
Figure 5: 3D view of interconnected vehicles.
STEREO VISION BASED VEHICLE DETECTION
435

A sophisticated way of breaking these links apart
is to declare the links at lower frequencies as outlier
with respect to the vehicle body. The detection and
removal may then be performed with the 1σ-rule.
The u/v-disparity approach is also suited well for
the second drawback of stage 1 of hypotheses gener-
ation illustrated in Figure 4(b). The disparity value
computation for the back and side plane of the ve-
hicle returned values being smaller than the region
growing tolerance, thus they got merged. Since the
u/v-disparity approach looks for frontoparallel vehi-
cle rear-end sides, both disparity patches result in dis-
tinct rows and are treated separately. Even if two
hypotheses are generated by the second stage, a sub-
sequent verification stage will eliminate non rear-end
vehicle candidates.
Assembling. Each rear-side vehicle candidate is
treated individually and is not merged with any other
candidate. A consideration of a remerge would have
to receive great care in order not to violate the basic
principle of this approach. Such a treatment is not
investigated in the scope of this work.
The assembly is alike to the one in stage 1. A vehi-
cle model can be instanced with the means of a lookup
table to get the length of a vehicle. This approach
tends to produce more hypotheses over the first stage.
Thus a height restriction is taken to dump those candi-
dates that are too small to be considered as a vehicle.
Figure 6(a) shows the already verified vehicles of the
disparity map in figure 4(b) without the second stage
and figure 6(b) visualizes the result of the collabora-
tion of both stages.
(a) Vehicle detection with-
out the second stage
(b) Vehicle detection includ-
ing the second stage
Figure 6: Influence of the second stage on vehicle detection.
4 EVALUATION
The proposed technique has been tested with two dif-
ferent stereo vision systems on a Desktop PC with
3.2 GHz and 1 GB RAM in the debug environment
with visual output. The intrinsic parameters of the
camera systems A and B (different manufacturers, dif-
ferent baselines) as well as the intrinsic and extrin-
sic parameters of the binocular system must be de-
rived, in order to transform input images geomet-
rically such that proportions or real world objects
are preserved. The Marquardt-Levenberg (Stephan
Lanser et al., 1995) procedure solves the non-linear
minimization problem:
d(p) =
l
∑
j=1
n
∑
i=1
k ˆm
i, j
− π(m
i
, p)k
2
−→ min (8)
After the intrinsic camera parameters of both cameras
are determined, the 6D outer orientation of both cam-
eras with respect to a calibration table visible in both
views can be exploited to derive the relative pose of
the cameras to each other by a transitive closure. The
retrieved parameter set calibrates the sensor stereo-
scopically.
4.1 Test Setup
The Leica GPS-1200 system enables the acquisition
of object position data relative to each other at a pre-
cision at centimeter scale (Vogel, 2007), (Vogel K.,
2008). For the test scenario two vehicles equipped
with the Leica system were used. The host vehi-
cle is a BMW 5-series, which has all the sensors for
stereo data acquisition, CAN data registration and ref-
erence data integration into the developer framework
installed.
4.2 Results
The sequences cover realistic traffic scenarios like a
laterally shifted vehicle following, braking maneuver
down to stop with a subsequent acceleration and driv-
ing at an adequate distance.
The red graph in figure 7(a) shows the unfiltered
Leica reference depth data overlayed over the green
graph stating the unfiltered stereo sensor depth data.
Sometimes the reference data oscillates strongly like
in the first 250 frames. This is an indicator, that the
correction data quality wasn’t sufficient to enable a
precise position measurement. But from that frame
on the graph characteristics looks fairly steady. The
green stereo sensor trajectory has a smooth run over
time, since the 3D data is processed by all the steps
in the iterative refinement for vehicle detection ex-
plained in this chapter.
In the second sequence there is no stop and go
traffic scenario, but rather a speedup of the target ve-
hicle running ahead up to a higher distance. The tar-
get vehicle longitudinal distance is stated at 26.381m
by the Leica reference system, whereas the distanced
measured and processed by the stereo sensor with
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
436
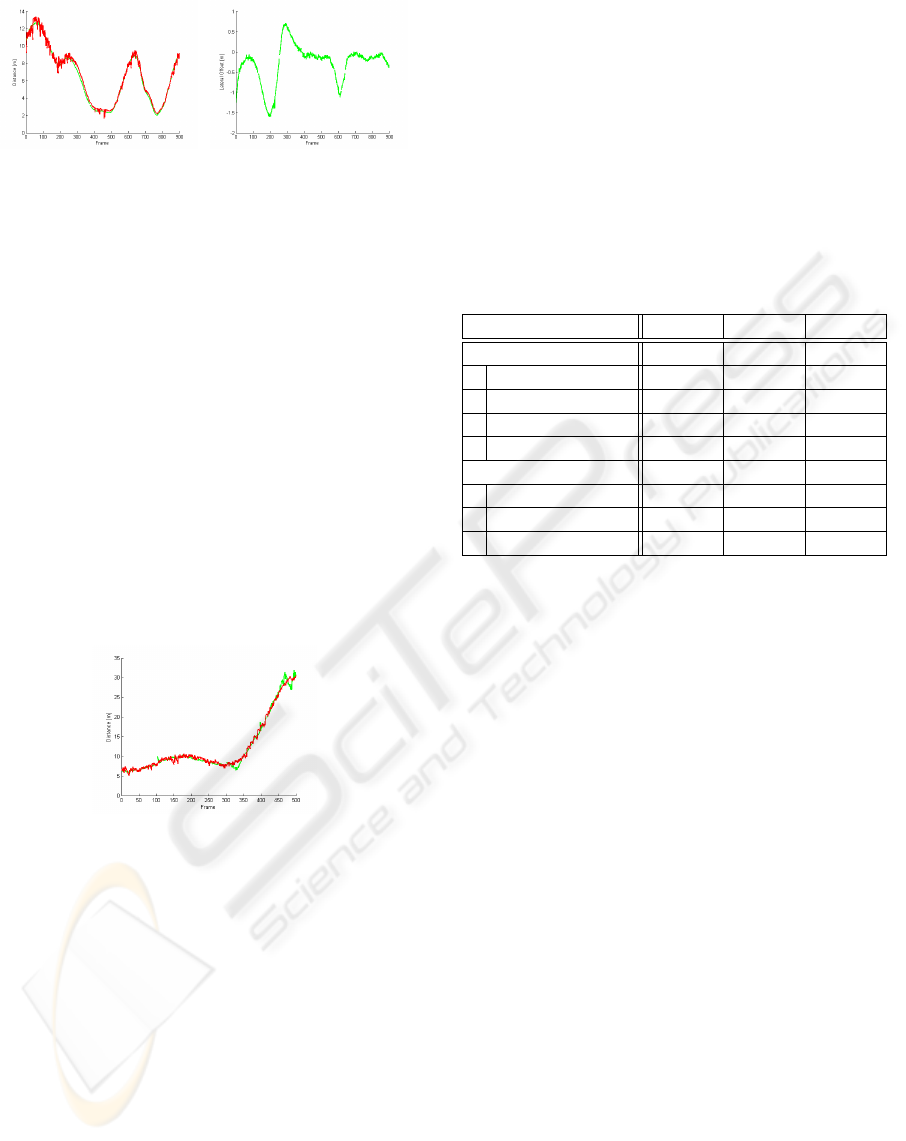
(a) Unfiltered depth distance
in RDS 1
(b) Unfiltered lateral shift
measured by stereo sensor in
RDS 1
Figure 7: Unfiltered distances of target vehicle.
its algorithms comes to 25.711m. This deviation is
still within the theoretical depth resolution given by
stereo configuration parameters. The total depth per-
formance comparison is stated in the diagrams in fig-
ure 8. These results clearly show a good distance
performance of the stereo sensor, even at higher dis-
tances. These results clearly show a good distance
performance of the stereo sensor, even at higher dis-
tances. The theoretical depth resolution at 30m is ap-
proximately 95cm already and since the target vehicle
appears with less pixels and therefore wider 3D data
point positions after reconstruction the resulting devi-
ation of depth computation is the logical closure. The
gap between both trajectories around frame 330 might
be caused by a little latency of the road model update.
Figure 8: Unfiltered depth distance of target vehicle in RDS
2.
Table 1 shows the time complexity of the pro-
posed algorithms. The statistical evaluation was ap-
plied to the execution times of multiple sequences
and calibration sets. The vehicle detection algorithms
were tested on a single processor desktop computer
with 3.2 GHz and 1 GB RAM in the debug environ-
ment with visual output. Therefore none of the im-
plemented algorithms was executed at full speed, be-
cause of an additional status output in all stages to
observe the correctness of operation. If such a sys-
tem was implemented on automotive compliant hard-
ware with e.g. multiple cores, some computations
like plane fitting, clustering, u/v-disparity or symme-
try map could be performed in a fraction of the stated
time. The remarkable time needed for u/v dispar-
ity computation could also be reduced if it was im-
plemented in hardware. The desktop implementa-
tion of it was not focused for time efficient compu-
tation, rather for easy modifiable testing variations.
The assembling strategy in the first stage has in the
worst case of n read-end planes and m side planes
m × n comparisons and thus the processing time has a
huge deviation between the minimum and maximum.
Given the u/v-disparity could be retrieved at image
acquisition time like the disparity image itself, the av-
erage processing time of the desktop implementation
comes to approximately 390ms.
Table 1: Temporal complexity of vehicle detection.
Processing Step t
min
t
max
t
mean
Stage 1 230 ms 390 ms 285 ms
Region growing 130 ms 180 ms 150 ms
Plane Fitting 55 ms 95 ms 70 ms
Clustering 10 ms 25 ms 15 ms
Assembling 35 ms 90 ms 50 ms
Stage 2 188 ms 348 ms 250 ms
u/v Disparity 170 ms 305 ms 220 ms
Selection 3 ms 8 ms 5 ms
Assembling 15 ms 35 ms 25 ms
5 CONCLUSIONS
This approach has shown that vehicle detection can
be performed accurately with a stereo vision sensor
in the challenging automotive environment. The first
stage of the iterative refinement approach in vehicle
detection allows the recognition of vehicles with the
underlying cubic model in most cases and works best
for vehicles being spatially well covered. The con-
sidered flat road model eliminates road curbs and ob-
jects higher than vehicles like the ceiling of a tunnel or
direction signs, which enhances the recognition pro-
cess due to a scene simplification. The plane fitting on
each segment returned by the region growing proce-
dure on the 3D data computes an important attribute
for later clustering to vehicle plane candidates. It was
unsheathed that planes fitted into those segments be-
longing to background objects like limbs and leaves
of trees have a normal vector pointing upwards with
respect to the road profile and can therefor be masked
out. The 6D mean-shift clustering process containing
3D position data of all segments and their unit normal
vectors merges the segments belonging to the same
vehicle efficiently and robust for the vehicle assem-
bly according to the cubical model.
The second stage of the iterative refinement local-
izes vehicles visible from the rear-end with the means
of u/v disparity images. This approach recognizes ve-
STEREO VISION BASED VEHICLE DETECTION
437

hicles being spatially close together even if the corre-
sponding regions in the disparity map are intercon-
nected. The method breaks such a horizontal link
apart and present vehicles are extracted in combina-
tion with the road profile. The combination of these
two iterative stages has shown to be an excellent de-
tection technique.
These algorithms were tested on both stereo vi-
sion systems in urban traffic and autobahn scenarios.
The stereo sensor B has shown a better performance,
which goes back to the larger baseline. The smaller
baseline of the system A would demand a more ag-
gressive filtering stage for outlier removal due to the
depth resolution of the stereo configuration. This
eliminates important feature points which makes ve-
hicle detection unreliable for the automotive usage.
The baseline of the system B is variable and was cho-
sen as twice the size of system A. This enabled a reli-
able detection and depth reconstruction of up to 30m
and vehicles could even be identified at higher dis-
tances, but with inaccurate dimensions. The vehicle
recognition quality was steady over the speed range
30 km/h - 130 km/h. This approach produces suitable
output for a vision-based ACC application. Parts of
this article have also been published as part of (Neve,
2009).
REFERENCES
Bertozzi, M., Broggi, A., Fascioli, A., and Nichele, S.
(2000). Stereo vision-based vehicle detection.
Chang, P., Hirvoven, D., Camus, T., and Southall, B.
(2005). Stereo-Based Object Detection, Classification
and Quanititative Evaluation with Automotive Appli-
cations. In Proceedings of the 2005 IEEE Computer
Science Conference on Computer Vision and Pattern
Recognition (CVPR’05).
Dorin Comaniciu and Peter Meer (1998). Distribution Free
Decomposition of Multivariate Data. In SSPR/SPR,
pages 602–610.
Dorin Comaniciu and Peter Meer (2002). Mean Shift:
A Robust Approach Toward Feature Space Analysis.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 24:603–619.
Gwenaelle Toulminet, Massimo Bertozzi, Stephane Mous-
set, Abdelaziz Bensrhair, and Alberto Broggi (2006).
Vehicle detection by means of stereo vision-based ob-
stacles features extraction and monocular pattern anal-
ysis. In Image Processing, IEEE Transactions on, vol-
ume 15, pages 2364– 2375.
Hong Wang, Qiang Chen, W. C. (2006). Shape-based
Pedestrian/Bicyclist Detection via Onboard Stereo Vi-
sion. In Computational Engineering in Systems Ap-
plications, IMACS Multiconference on, pages 1776–
1780, Beijing, China.
Huang, Y., Fu, S., and Thompson, C. (2005).
Stereovision-Based Object Segmentation for Au-
tomotive Applications. EURASIP Journal on
Applied Signal Processing, 2005(14):2322–2329.
doi:10.1155/ASP.2005.2322.
Labayrade, R., Aubert, D., and Tarel, J.-P. (2002). Real
Time Obstacle Detection on Non Flat Road Geom-
etry through ‘V-Disparity’ Representation. In Pro-
ceedings of IEEE Intelligent Vehicle Symposium, Ver-
sailles, France.
Neve, A. (2009). 3D Object Detection for Driver Assistance
Systems in Vehicles. PhD thesis, Technische Universi-
taet Muenchen.
Pang, C., Lam, W., and Yung, N. (2004). A novel method
for resolving vehicle occlusion in a monocular traffic-
image sequence. In Intelligent Transportation Sys-
tems, IEEE Transactions, volume 5, pages 129 – 141.
Pasquale Foggia, Alessandro Limongiello, and Mario
Vento (2005). A Real-Time Stereo-Vision System For
Moving Object and Obstacle Detection in AVG and
AMR Applications. In CAMP, pages 58–63.
Richard Hartley and Andrew Zisserman (2003). Multiple
View Geometry in Computer Vision. Cambridge Uni-
versity Press.
Sergiu Nedevschi, Radu Danescu, Dan Frentiu, Tiberiu
Marita, Florin Oniga, Ciprian Pocol, Rolf Schmidt,
and Thorsten Graf (2004). High accuracy stereo vi-
sion system for far distance obstacle detection. In In-
telligent Vehicles Symposium, 2004 IEEE, pages 292
– 297.
Stephan Lanser, Christoph Zierl, and Roland Beutlhauser
(1995). Multibildkalibrierung einer CCD-Kamera.
Technical report, Technische Universitt Mnchen.
Sun, Z., Bebis, G., and Miller, R. (2006). on-road vehicle
detection using optical sensors: A review. In IEEE
Transactions on pattern analysis and machine intelli-
gence, volume 28.
Thomas A. Runkler (2000). Information Mining. Vieweg.
Vogel, K. (2007). High-accuracy reference data acquisition
for evaluation of active safety systems by means of a
rtk-gnss-surveying system. In Proceedings of the 6th
European Congress and Exhibition on ITS, Aalborg.
Denmark.
Vogel K., Schwarz D., W. C. (2008). Reference maps of
adas scenarios by application of a rtk-gnss system.
In Proceedings 7th European Congress and Exhibi-
tion on Intelligent Transport Systems and Services,
Geneva. Switzerland.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
438
