
REAL-TIME INTERACTIVE L-SYSTEM
A Virtual Plant and Fractal Generator
Ludovic Hamon, Emmanuelle Richard, Paul Richard and Jean-Louis Ferrier
Laboratoire d’Ing
´
enierie des Syst
`
emes Automatis
´
es (LISA)
Universit
´
e D’Angers, 62, Avenue Notre Dame Du Lac, 49000 Angers, France
Keywords:
Virtual plant, L-systems, Real-time interaction, Haptic rendering, Augmented reality.
Abstract:
L-system is a rewriting process based on Chomsky grammar that can generate 3D fractals and virtual plants.
Its efficiency has been proved for more than twenty years with the works of Lindenmayer and Prusinkiewicz in
particular. This paper presents a Real-Time Interactive L-system (RTIL-system) allowing real-time rendering,
interactions with a user and/or the environment, haptic feedback and covering most of the important L-systems
extensions such as parametric and context sensitive features. Different potentialities of the RTIL-system are
illustrated where the user intervention becomes an essential element of plant/fractal evolution through Virtual
Reality and Augmented Reality applications.
1 INTRODUCTION
Plant modeling is used in various domains like botany,
agronomy, forestry, ecology, urban design, and even
video games. Virtual plants are computer simulations
of the growth, development and deployment of plants
in three-dimensional (3D) space. In Virtual Reality
(VR) or Augmented Reality (AR) applications, real-
time interaction with the virtual plants is required.
Moreover, in some applications involving tasks such
as pruning, physical properties may be added to en-
able haptic rendering and therefore the simulation re-
alism. In the last decades, several software applica-
tions have been developed. For example, Amap is
based on statistic measurements, Markov chains and
the Monte-Carlo method (Cirad, 2009). Another soft-
ware program called Xfrog was specifically devel-
oped for trees modeling (Lintermann and Deussenm,
1999). Vlab can generate, order and save an amount
of virtual plant models coming from different pro-
grams (Federl and Prusinkiewicz, 1999). GreenLab
adopted the AMAP discretization scheme and a dual-
scale automation (Reffye et al., 2003).
One of the most interesting software applications
is L-studio/cpfg/lpfg created in 1999 at the Univer-
sity of Calgary (Canada) by Prusinciewicz and co-
workers (Prusinkiewicz et al., 2000; Karwowski,
2002). It is based on L-system (Lindenmayer,
1968; Prusinkiewicz and Lindenmayer, 2004), a par-
allel rewriting process inspired by Chomsky gram-
mar. This formal mathematical approach can gener-
ate 3D virtual plants with realistic morphological and
physiological aspects.
Numerous applications are based on the L-system
model. However, to our knowledge, none of them are
simultaneously: (i) open source, (ii) with a good ren-
dering quality, (iii) in real time, (iv) covering most
of L-system essential extensions such as paramet-
ric and context sensitive features, and (v) interac-
tive. This paper presents a Real-Time Interactive L-
system (RTIL-system) allowing interaction between
virtual plants/fractals and both the user and the envi-
ronment. In addition, our approach takes into account
most important L-systems extensions. Collision de-
tection and haptic rendering of the virtual plant/fractal
are allowed. Different potentialities of the proposed
RTIL-system are illustrated through VR/AR applica-
tions such as interactive dynamic plants evolution,
pruning, constrained growing and an interactive frac-
tal. In the next section, the formalism and evolution
of L-systems focusing on real-time interactive appli-
cations are given. Section 3 is dedicated to the basic
features and the implementation of our RTIL-System.
Real-time interaction with the user and/or the envi-
ronment are described in section 4 with correspond-
ing applications. Finally a conclusion provides some
perspectives.
370
Hamon L., Richard E., Richard P. and Ferrier J. (2010).
REAL-TIME INTERACTIVE L-SYSTEM - A Virtual Plant and Fractal Generator.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 370-377
DOI: 10.5220/0002845703700377
Copyright
c
SciTePress
2 L-SYSTEMS: FORMALISM
AND EVOLUTION
2.1 Elementary Notions and Extensions
L-system is a formal language that was firstly used to
describe the development and proliferation of simple
multi-cellular organisms (Lindenmayer, 1968). Lin-
denmayer and Prusinkiewicz developed and extended
this language to model plants (Prusinkiewicz and
Lindenmayer, 2004). L-system is a triplet (V, w, P),
V being an alphabet, w being an axiom, and P being
a set of production rules. The couple (p,s) belonging
to the set production rules is composed of a prede-
cessor (p) and a successor (s). A derivation process
replaces the axiom symbols equal to predecessors by
the corresponding successors. If there is no corre-
sponding predecessor, then the symbol is replaced by
itself. After the axiom is completely reviewed, the
string obtained is called ”L-string”. Parametric L-
systems were important improvements in which each
symbol (called ”module”) may take a finite number
of real parameters (Prusinkiewicz and Lindenmayer,
2004). Furthermore, a logical condition was added to
each production rule that is applied if: (i) the current
symbol is equal to the rule predecessor, (ii) the num-
ber of parameters of symbol is equal to the number
of parameters of the rule predecessor, and (iii) if the
rule condition is true (Fig. 1). Thereafter, Linden-
w : B(2)A(4,4)
p
1
: A(x,y) : y ≤ 3 → A(x ∗ 2, x + y))
p
2
: A(x,y) : y > 3 → B(x)A(x/y,0)
p
3
: B(x) : x < 1 → C
p
4
: B(x) : x ≥ 1 → B(x − 1)
Figure 1: Example of parametric L-system evolution
(Prusinkiewicz and Lindenmayer, 2004).
mayer and Prusinkiewicz proposed the turtle geom-
etry concept (belonging to the LOGO Language) to
give a geometrical interpretation to the L-string. This
approach is based on an imaginary turtle that walks
and draws lines. In two dimensions, the turtle geome-
try concept is based on the triplet (x,y,a), (x,y) being
the position of the turtle, and a being the yaw angle
of the turtle movement. A simple example of con-
text free deterministic D0L-system is given in figure
2(a). The following interpretation symbols are intro-
duced with a stack that saves the turtle states as fol-
lows (Prusinkiewicz and Lindenmayer, 2004):
F : move a d distance forward and draw a line.
(x,y,a) ⇒ (x + d ∗ cos(a),y + d ∗ sin(a),a)
f : move a d distance forward without drawing a line
(x,y,a) ⇒ (x + d ∗ cos(a),y + d ∗ sin(a),a)
+ : turn left of o angle. (x,y,a) ⇒ (x,y,a + o)
− : turn right of o angle. (x,y,a) ⇒ (x,y,a − o)
[ : push the current turtle state to the stack.
] : pop the previous turtle state from the stack.
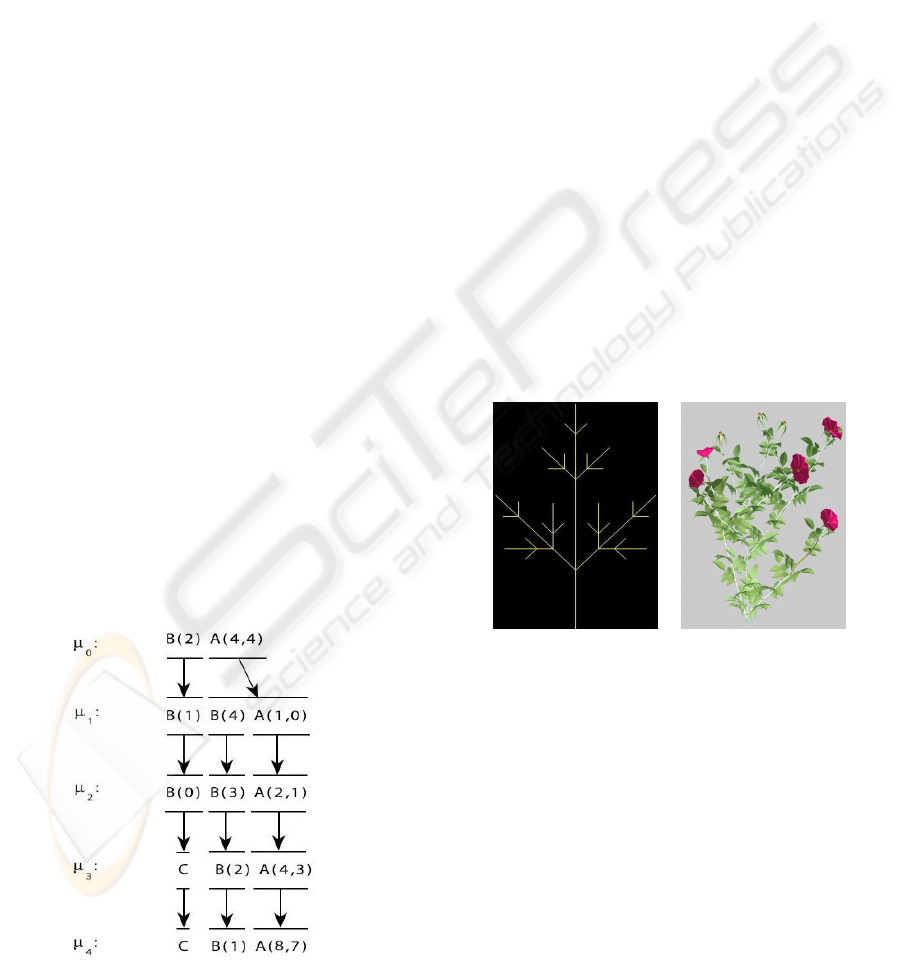
Lsystem : 1
derivation length : 4
Axiom : A
A →F[+A][−A]FA
F →FF
a b
Figure 2: Illustrations of D0L-systems: (a) a simple
model with corresponding axiom and production rules
(Prusinkiewicz and Lindenmayer, 2004); (b) a realistic rose-
bush (Favre et al., 2007).
In 1970s and 1980s several new forms of L-systems
appeared and numerous interpretation symbols were
proposed. For example, stochastic L-systems have
been developed to add a probability to each produc-
tion rule (Prusinkiewicz and Lindenmayer, 2004).
This feature allows the application of several rules to
the same symbol, which was not possible with de-
terministic L-systems. Pseudo L-systems have rule
predecessors that can be made up of several mod-
ules (Prusinkiewickz, 1986). Another interesting ex-
tension of L-systems is context sensitive L-system
REAL-TIME INTERACTIVE L-SYSTEM - A Virtual Plant and Fractal Generator
371

(called D1L-systems or D2L-systems). In a left (re-
spectively right) context sensitive L-system a rule is
applied only if the left (respectively right) symbol
of the current symbol is equal to the left (respec-
tively right) context of the current rule predecessor
(Prusinkiewicz and Lindenmayer, 2004).
Different applications with advanced graphical
rendering have appeared. For example, Baele and co-
workers have generated real time trees with different
detail levels, lightning and animation under wind us-
ing GPU capabilities (Baele and Warz
´
ee, ).
From 1990s to now, virtual plants generated by L-
system explicitly have described spatial distribution
of plant organs in three dimensions as a collection of
interconnected components. Furthermore, they model
the morphological and physiological aspects (Favre
et al., 2007) and the dynamic of plants population
(Bornhofen and Lattaud, 2007; Prusinkiewicz, 2009).
2.2 Interactions with the User
Many software applications dedicated to plant model-
ing exist and provide real-time basic interactions with
virtual plant such as rotation or zoom. These inter-
actions use the computer mouse and/or the keyboard
(Federl and Prusinkiewicz, 1999; Reffye et al., 2003;
Prusinkiewicz et al., 2000; Karwowski, 2002). How-
ever, some approaches have focused on advanced in-
teractions techniques. For example, Joanna et al. have
developed an interesting interactive L-system called
ILSA (Interactive L-String Arranger), based on the
Cpfg engine (Joanna et al., 1999; Prusinkiewicz et al.,
2000). The user can select plant components using a
mouse picking technique. The selection can be done
with two points on a branch (a starting and an ending
point). Operations like twisting, bending or pruning,
are possible. Interactive manipulations are executed
in semi real time, using a basic graphic rendering.
More recently, Onishi and co-workers have presented
a D0L-system in which 3D turtle cartesian coordi-
nates are directly sent to the environment (Onishi
et al., ). They use a magnetic tracking system to gen-
erate the trunk and the branches from hand move-
ments. Corresponding L-strings are generated and
branches are attached to the trunk by some speci-
fied connecting points. The user is also able to spec-
ify some geometric primitives or draw silhouettes in
which parts of plant will grow up. Furthermore,
a component included in the selected zone may be
pruned, rotated, etc. These works provide some in-
teresting 3D interactions but are all based on simple
non-parametric D0L-systems limiting both the mod-
eling possibilities and animation rendering.
2.3 Interactions with the Environment
Another interesting feature of interactive L-systems
concerns interaction with the environment. The
Cpfg engine includes this possibility using a specific
module called ”Communication Module” (Mech,
1997). This module is presented by the follow-
ing syntax: ”?E(x1,. . . ,xn)”. It allows the program
to send and receive information from the environ-
ment. For example, suppose the following L-string:
”F(2)?E(1,2)F(3)F(5)F(5)”. Information sent to envi-
ronment is: position of the communication module in
the L-string and its parameters (here 1 and 2), turtle
state (position and orientation), name and parameters
of the module that follow the communication module
(here ”F(3)”). Information received from the environ-
ment is the parameters (x
1
,. . . ,x
n
) that can be mod-
ified by this last one. A L-system with a commu-
nication module is called Open L-system. Open L-
system offers several interesting possibilities such as
handling collisions between plants organs or compo-
nents, pruning, water diffusion in soil, light distribu-
tion and several other interactions. However, a com-
munication module is required for each modules to
send the entire topological structure to the environ-
ment.
An interesting work on L-systems was done by Born-
hofen et al. who used a D0L-system to model dif-
ferent plants in a virtual garden. These plants grew
according to some environmental factors such as sun-
light and soil components (Bornhofen and Lattaud,
2007). In addition, the virtual plants are in competi-
tion for resources with respect of morphological and
physiological aspects.
3 RTIL-SYSTEM: BASIC
FEATURES
RTIL-system is based on Cpfg concepts and model
and uses a quite similar syntax. It is a library
written in C/C++ language that allows creating and
editing a script file and generating a 3D rendering
of the virtual plant using OpenGL library with op-
tional stereoscopic features for depth sensation en-
hancement (3DVision
T M
device from NVIDIA was
used). RTIL-system takes into account, determinis-
tic, context free, context sensitive, parametric, non
parametric and pseudo L-systems features . Homo-
morphism and decomposition rules are also available
(Prusinkiewicz et al., 2000; Karwowski, 2002).
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
372
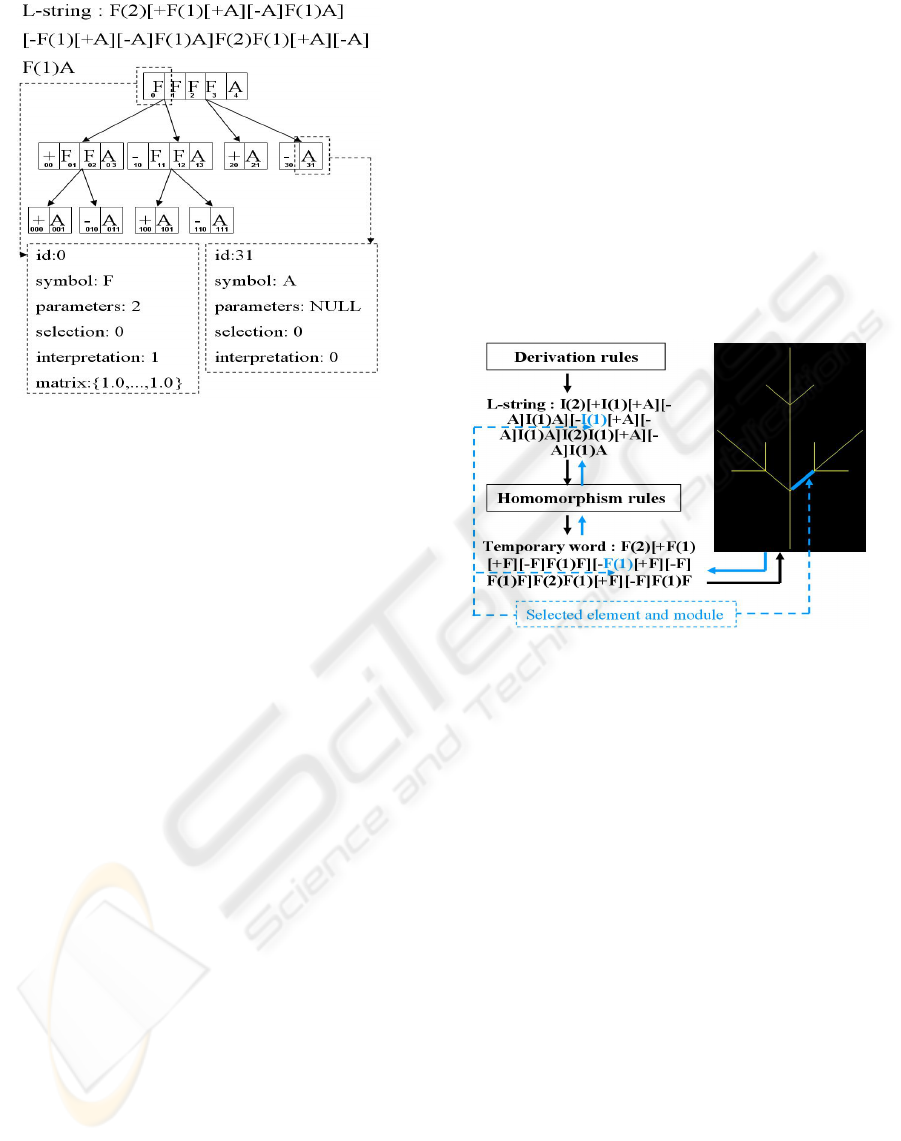
Figure 3: Tree structure of a L-string example.
3.1 Data Structure
A classic tree from computer science is used (fig. 3).
Each node is composed of a finite set of modules. For
each module, the following attributes are recorded: (i)
an identifier called id, (ii) its symbol, (iii) its param-
eters, (iv) a boolean variable (selection) that indicates
if the current module is selected by the user, (v) a
boolean variable (interpretation) that indicates if the
current module has a graphical representation. In the
case where ”interpretation” is true, some geometrical
information is added such as (vi) an OpenGL homo-
geneous matrix, etc..
3.2 Scripting and Syntax
A typical RTIL-system rule is presented as follows:
cg<pred>cd: C
a
cond C
b
→ succ, where ”pred” is
the predecessor, cg is the left context, cd is the right
context, cond is a logical proposition, C
a
and C
b
are C
langage instructions and ”succ” is the successor. Ac-
cording to the location of C language instructions in
the script, their respective executions are triggered as
follows: C
a
is executed if the predecessor and its con-
text correspond to the current L-string module and its
context. C
b
is executed if the previous condition for
C
a
execution is true and the logical proposition cond
is true. Other C language instructions can be included
after the Extern Start and Extern StartEach keywords.
The first one indicates that the C instructions are exe-
cuted before the beginning of the first derivation pro-
cess. The second one indicates that the C language
instructions are executed before each derivation pro-
cess. These instructions are limited to simple oper-
ators like, allocation, addition, substraction etc.. An
example (script1) with its graphical representation is
given below and illustrated in figure 4.
Lsystem : script1
Derivationlength : 2
Axiom : A
ExternStart : {c
2
= 0;s
2
= 0;}
ExternStartEach : {c
2
= 0;}
A → I(1)[+A][−A]I(1)A
I(x):{c
2
=c
2
+1;} x≤10 {s
2
=s
2
+1;}→ I(x ∗ 2)
Homomorphism
I(x) → F(x)
A → F
Figure 4: From L-string to graphical rendering : derivation
and homomorphism.
The derivation length is the number of required
derivation. The global variable ”c
2
” counts the num-
ber of call of second rule during the entire process.
The global variable ”s
2
” counts the application num-
ber of second rule. Homomorphism is an optional and
additional derivation process with specific rules that
follow homomorphism keyword. It is executed after
the L-string generation and creates a temporary word
(see black arrows in fig. 4). Homomorphism process
is usually used to isolate the interpretation sequence
from the derivation sequence i.e: most of the inter-
pretation symbols are added with the homomorphic
derivation. It allows creating an accurate topological
formalism in which, for example, each plant compo-
nent possesses its own symbol, its own corresponding
rules as well as its own functions and operators.
REAL-TIME INTERACTIVE L-SYSTEM - A Virtual Plant and Fractal Generator
373

4 RTIL-SYSTEM INTERACTIVE
FEATURES
4.1 Data Transmission and Reception
The Extern Start and Extern EachStart keywords al-
low global variables definition. Global variables can
be seen and edited in real time by programs that in-
clude the RTIL library. A function func(id,x
1
,. . . ,x
n
)
can be included in the C language instructions and/or
in the module parameters. This function calls a func-
tion written in a C/C++ file, referred to ”id”, sends
(x
1
,. . . ,x
n
) parameters and returns a real value. Thus,
advanced algorithms, functions, procedures and data
types belonging to C/C++ language may be used.
A specific procedure named com(x
1
,. . . ,x
n
) can be
called in C instructions. It sends (x
1
,. . . ,x
n
) param-
eters that could be modified by intern or extern pro-
grams. With this procedure, local variables and other
information are available to an environment that can
simulate light, collisions, soil distribution etc. Finally,
between two derivation steps, each graphical piece of
information linked to each interpretation module (i.e:
positions and orientations of the turtle geometry) can
be seen by programs including our RTIL-library.
Figure 5: Development of a virtual plant : unconstrained
evolution (a), and evolution constrained to the outside of a
sphere (b).
An example of interaction with the environment
is illustrated in figure 5. In this case the virtual plant
growth is constrained to the outside of a sphere. This
process is achieved thanks to rules similar as this one:
I(i) :{com(x);} (x == 1) → I(i + di). The procedure
com calls an ”environment” program that tests if the
position of the current graphical component linked to
the current internode I is inside the sphere or not. If
not, then x is set to 1 and the current internode I is
lengthened by di. In the opposite case, the internode
stops growing.
Figure 6: A child feeding a virtual plant using an AR inter-
action technique.
An interesting application based on our RTIL-
system is illustrated in figure 6. The aim of this AR
application was to make children (i) learn about some
fundamental needs of plants (water, heat and light)
and (ii) become aware of differences in plant needs
throughout their life cycle. Using a menu-based in-
teraction technique, the child can bring various quan-
tities of these three fundamental needs to a virtual
plant, and observe their effect on the germination,
growth and reproduction steps. The three needs are
defined using global variables that are updated be-
tween two derivation steps. Depending on their val-
ues, positive or negative rules are applied to the plant
evolution. A possible evolution of the virtual plant
is illustrated in figure 7. An experiment in which
twenty-four K4-K5 children were instructed to make
a virtual plant grow was carried out and the results are
exposed in a paper called ”Real-Time Interactive L-
system for Virtual Plants, An Augmented Reality Ed-
ucational Application”, submitted for a Special Issue
on Augmented Reality on November 2009. (Virtual
Reality Journal, 2010).
Figure 7: Illustration of a possible evolution of the virtual
plant : flowering stage (a), followed by a lack of water and
excess of heat (b)(c)(d), and then by a correct feeding (e)(f).
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
374
4.2 Graphical Interaction and Haptic
Rendering
Graphical interaction with the virtual plant requires
the three following steps: (i) select one (or more) 3D
component(s), (ii) find the corresponding module(s)
in the L-string (see blue arrows in fig. 4), and (iii) ap-
ply a corresponding action on the selected module(s).
For example, a pruning task consists in the removal
of a graphic element coupled with the deletion of the
corresponding module in the L-string. Some difficul-
ties may appear when linking the graphical compo-
nent to the corresponding L-string module whereas
homomorphism concept and pseudo L-systems al-
low the creation of different L-system scripts gen-
erating the same graphical shape and behavior. Let
us consider the script1 with the first homomorphic
rule I(x) → F(x) replaced by this one: I(x) →
F(x/2)F(x/2). This change leads to the same graph-
ical rendering but the application is not bijective.
Thus, apart from L-systems without homomor-
phism process, graphical selection tasks necessarily
require that the predecessor of each homomorphic
rule has the same number of modules as the corre-
sponding successor (proposition 1). Consequently, to
preserve the current formalism and to avoid this prob-
lem, RTIL-system homomorphic rules are limited to
proposition 1.
4.2.1 3D Interaction Devices
For the selection of a graphic component of the plant,
our RTIL-system allows the integration of different
types of 3D interaction devices such as the (i) the
Polhemus Patriot
T M
electromagnetic tracking device
from Polhemus or (ii) the PhantomOmni
T M
desk-top
haptic interface from Sensable (fig. 10). Selection of
plant components is achieved using a collision detec-
tion algorithm involving a spherical cursor (fig. 11)
and the geometrical model associated with the se-
lected component.
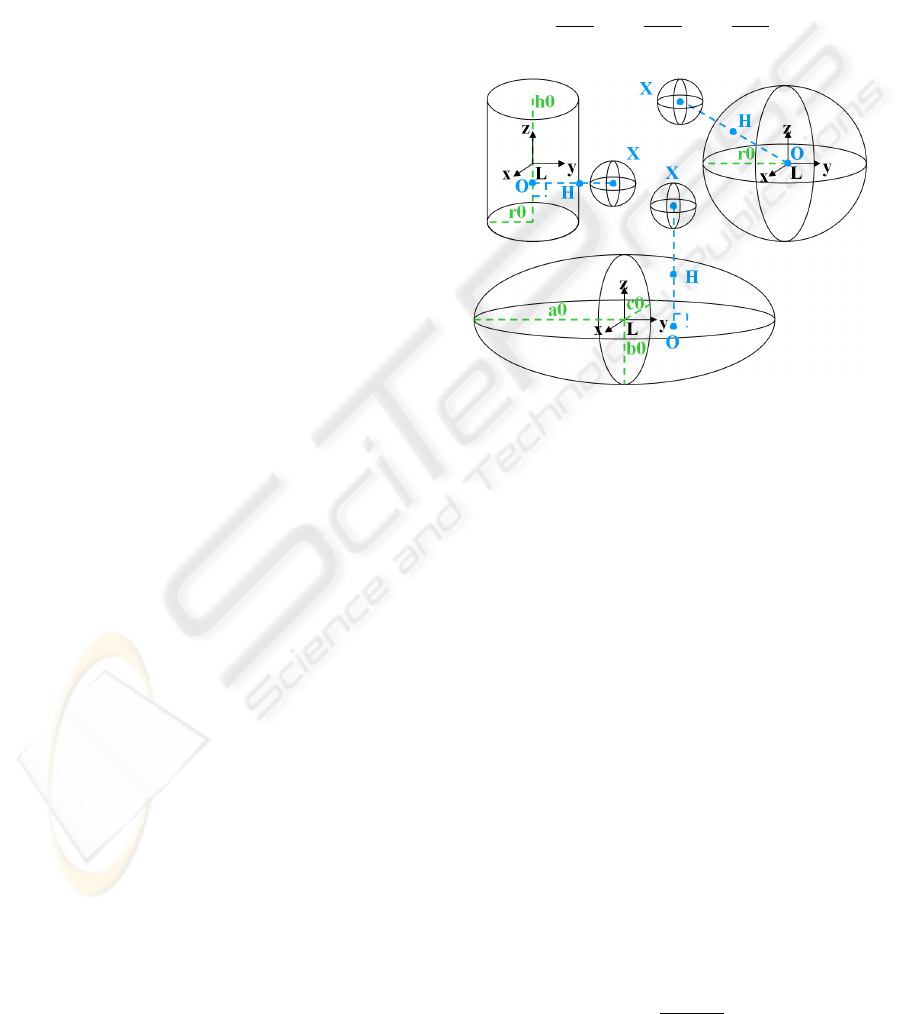
4.2.2 Selection: Collision Detection and Haptic
Rendering
In order to handle collision detection and provide hap-
tic rendering, RTIL system associates a geometrical
primitive to each plant component (Fig. 8): (i) a
cylinder for roots, branches, trunks, internodes and
fractal components (ii) a sphere for seeds and fruits,
(iii) and an ellipsoid for leaflets, leaves and sepals
(merged with the (LX,LY) surface plan). Figure 9
shows both graphical and physical models of a virtual
flower, and their superimposition.
Thus, the selection of a component of the plant re-
quires that the center X(x
1
,y
1
,z
1
) of the spherical cur-
sor with radius r is solution to one of the follow-
ing equations according to the geometrical primitive,
where L(x
0
,y
0
,z
0
) is the origin of the local cartesian
space (fig. 8) :
Cylinder : (0 ≤ y
1
≤ h
0
) and
((x
1
− x
0
)
2
+ (z
1
− z
0
)
2
≤ (r + r0)
2
)
Sphere :
(x
1
− x
0
)
2
+ (y
1
− y
0
)
2
+ (z
1
− z
0
)
2
≤ (r + r0)
2
Ellipsoid : (
x
1
−x
0
a
0
+r
)
2
+ (
y
1
−y
0
b
0
+r
)
2
+ (
z
1
−z
0
c
0
+r
)
2
≤ 1
Figure 8: Three geometrical models used for collision de-
tection and haptic rendering : (a) a cylinder for roots,
branches, trunks, internodes and fractal components ; (b)
a sphere for seeds and fruits ; and (c) an ellipsoidal surface
for leaflets, leaves and sepals.
A blue color shows that a component is selected.
Force feedback vectors have been implemented when
the PhantomOmni
T M
haptic interface is used thanks
to RTIL library. For each physical element, two points
have been calculated depending on ”X” point loca-
tion: ”O” is the center of the physical sphere (or
respectively, the orthogonal projection of X on the
cylinder axe, or the orthogonal projection of X on the
(LX,LY) ellipsoid plan), and ”H” is the intersection
of OX line and the physical sphere surface (or respec-
tively the cylinder surface, or the ellipsoid surface)
(fig. 8).
With these two points, two simple forces
−→
F have
been created in the cartesian space: an attractive force
that attracts the Phantom Omni inside the physical
representation if k
−→
OXk ≥ (k
−→
OHk+ r), and a repulsive
force that allows the Phantom Omni sliding along the
physical representation if k
−→
OXk > ε:
−−−−→
NorPos =
−→
OX, Normalize(
−−−−→
NorPos),
Attractive Force:
−→
F = −
sti f f ness1
k
−→
OXk
2
×
−−−−→
NorPos
REAL-TIME INTERACTIVE L-SYSTEM - A Virtual Plant and Fractal Generator
375

Figure 9: A virtual flower : (a) graphical model ; (b) phys-
ical model ; and (c) superimposition of both graphical and
physical models.
Repulsive Force:
−→
F =
sti f f ness2
k
−→
OXk
2
×
−−−−→
NorPos
Figure 10: A user working on a virtual plant, with Phantom
Omni device, force feedback and stereoscopic viewing.
The first effect constrains the user to navigate in-
side and along the virtual object. The stiffness coeffi-
cient adjusts the attraction force. With the second ef-
fect touch sensation appears. The virtual object seems
rigid with a high value of stiffness coefficient or soft
with a low value. Figure 10 shows a user perform-
ing tasks with force feedback in stereoscopic viewing
condition.
4.2.3 Deletion and Pruning
When one or more graphical components are selected
by the user, with the help of dedicated interfaces, they
can be pruned. That leads to: (i) the deletion of the
corresponding modules in the data-structure (fig. 3),
(ii) the deletion of all modules that follow these last
ones in the same node, (iii) and the recursive deletion
of all ”son” nodes that are linked to previous erased
”father” modules in (i) and (ii) (fig. 11, (b) and (c)).
4.2.4 Partial Interactive Derivation
Our RTIL-system introduces a new keyword called
Interaction in the script file (fig. 12). It is followed
by a finite set of rules called ”Interaction Rules” that
can be applied to selected modules only. With this
feature, the concept of Partial Interactive Derivation
Figure 11: Illustration of a simple pruning task : the virtual
Phantom Omni stylus (a), selection of an internode of the
virtual plant (b), and deletion (c).
is introduced i.e: one or more derivation steps with
Interaction Rules on only selected modules. If there
are no Interaction rules, usual rules replace them. A
large set of possible interactive tasks such as bend-
ing/twisting components, partial development, elon-
gation/reduction of components, breaking, insertion
of elements etc. . . are available with Partial Interac-
tive Derivation.
Lsystem : script2
Axiom : A + + + A + + + A
A →A − A + +A − A
Interaction
A →A − A + +A − A
Homomor phism
A →F
Figure 12: A half divided Koch fractal snowflake.
For example, Figure 12 shows a mutated ”Koch
Fractal snowflake”. From a normal Koch snowflake
in (a), user selects two components in (b) and (c).
With application of the Koch interactive rule ”A →
A − A + +A − A” to selected components, a half di-
vided snowflake is obtained in (d). Then (e) and (f)
are the results of two classic derivations on the entire
object.
Another example illustrating the Partial Interac-
tive Derivation process is shown in figure 13. A bug,
represented by a red sphere, is placed (b) on a selected
component of the virtual plant (a) thanks to the fol-
lowing interaction rule: I(i) → BI(i) (I: inter-node, B:
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
376

bug). As a consequence of several normal derivations,
the bug climbs along the current axis of the plant and
eats the flower (c). This induces an apical dominance
phenomenon leading to the outgrowth of a lateral bud
(c).
With respect of the L-system concept, ”Partial In-
teractive Derivation” lead to open L-system formal-
ism to advanced interactions where user can create,
edit, control part or entire derivation process and be-
comes an important element of the model evolution.
Figure 13: Example of a Partial Interactive Derivation pro-
cess: a bug is placed (b) on the selected component (a),
climbs along the axis and eats the flower, and the result is
the outgrowth of a lateral bud (c).
5 CONCLUSIONS
This paper presents a Real-Time Interactive L-system
(RTIL-system) allowing interactions with both the
user and the environment. RTIL-system takes into ac-
count most important L-systems extensions such as
parametric and context sensitive features. In order to
preserve L-systems formalism and allow advanced in-
teractions, the Partial Interactive Derivation concept
is introduced. It allows the definition of Interaction
Rules that can be applied on selected modules only.
Collision detection and haptic rendering of the vir-
tual plants are also provided. Different potentialities
of the RTIL-system are illustrated through VR/AR
applications such as interactive dynamic plants evo-
lution, pruning, constrained growing and a mutated
Koch fractal. In future work we plan to run experi-
ments that will aim to investigate human performance
in tasks involving multimodal interaction with virtual
plants. Real time advanced graphical rendering tech-
nics will be explored. In addition, we will used our
RTIL-system to generate different geometrical forms
and interact with force feedback.
REFERENCES
Baele, X. and Warz
´
ee, N. Real time l-system generated
trees based on modern graphics hardware. In Inter-
national Conference on Shape Modeling and Applica-
tions, SMI’05 2005.
Bornhofen, S. and Lattaud, C. (2007). Evolution of virtual
plants interacting with their environment. In Proceed-
ings of the 9th International Conference on Virtual Re-
ality (VRIC’07).
Cirad (2009). Amap website, http://amap.cirad.fr.
Favre, P., Gu
´
eritaine, G., Andrieu, R., and Boumaza, R.
(2007). Modelling the architectural growth and de-
velopment of rosebush using l-systems. In Workshop
on Growth Phenotyping and Imaging in Plants.
Federl, P. and Prusinkiewicz, P. (1999). Virtual labora-
tory: An interactive software environment for com-
puter graphics. In Proceedings of Computer Graphics
International.
Joanna, L., Power, A., Bernheim, B., and Prusinkiewicz, P.
(1999). Interactive arrangement of botanical l-system
models. In Proceedings of the Symposium on Interac-
tive 3D Graphics, pages 175–182.
Karwowski, R. (2002). Improving the process of plant mod-
eling: The l+c modeling language. Ph.D. dissertation,
University of Calgary, Canada.
Lindenmayer, A. (1968). Mathematical models for cellular
interactions in development. in Journal of Theoretical
Biology parts I and II, pages 280–315.
Lintermann, B. and Deussenm, O. (1999). Interactive mod-
elling of plants. In IEEE Computer and Application,
volume 19, pages 2–11.
Mech, R. (November 1997). Environment using l-systems
and their extensions. PhD thesis, University of Cal-
gary, Canada.
Onishi, K., Murakami, N., Kitamura, Y., and Kishino, F.
Modeling of trees with interactive l-system and 3d
gestures. In International Workshop on Biologically
Inspired Approaches to Advanced Information tech-
nology, pages 222–235.
Prusinkiewickz, P. (1986). Graphical applications of l-
systems. In Proceedings of Graphical Interface and
Vision Interface 86, pages 247–253.
Prusinkiewicz, P. (2009). publications 1986 - 2009,
http://algorithmicbotany.org/papers/.
Prusinkiewicz, P., Karwowski, R., Mech, R., and Hanan, J.
(2000). L-studio/cpfg: A software system for model-
ing plants. Nin Nagl M., Schrr A. and Mnch M. (eds.),
Applications of Graph Transformations with Indus-
trial Relevance,Lecture Notes in Computer Science.
Prusinkiewicz, P. and Lindenmayer, A. (1990–2004). The
algorithmic beauty of plants. Springer Verlag.
Reffye, P., Zhao, X., Yan, H., and Kang, M. (2003). Green-
lab: a new methodology towards plant functional-
structural model - structural aspec. In Proceedings
PMA03 : 2003’ International symposium on plant
growth modeling, simulation, visualization and their
applications.
REAL-TIME INTERACTIVE L-SYSTEM - A Virtual Plant and Fractal Generator
377
