
CLASSIFICATION OF CHALLENGING MARINE IMAGERY
Piyanuch Silapachote, Frank R. Stolle, Allen R. Hanson
Department of Computer Science, University of Massachusetts Amherst, Amherst, MA 01003, U.S.A.
Cynthia H. Pilskaln
School of Marine Science and Technology, University of Massachusetts Darthmouth, North Darthmouth, MA 02747, U.S.A.
Keywords:
Marine science application, Biologically inspired vision system, Image segmentation.
Abstract:
Covering over 70% of the Earth’s surface and containing over 95% of the planet’s water, the aquatic ecosystem
has a great influence on many environmental functions. An indicator of the health of a marine habitat is its
populations, estimated by taking underwater images and labeling various species. Designing an automated
algorithm for this task is quite a challenge. Image quality tends to be low due to the dynamics of the water
body. The diversity of shapes and motions among living plankton and non-living detritus are remarkable. We
have applied two very different techniques from computer vision to the automatic labeling of tiny planktonic
organisms. One is a common approach involving segmentation and calculations of statistical features. The
other is inspired by the sophisticated visual processing in primates. Both achieved competitively high accu-
racies, comparable to general agreement among expert marine scientists. We found that a relatively simple
biologically motivated system can be as effective as a more complicated classical schema in this domain.
1 INTRODUCTION
Self-regulating marine ecosystems are home to many
primary producers. There is a need to compile in-
formation on the composition and size distribution of
marine phyto- and zooplankton as well as the organic-
rich, aggregated detrital material resulting from life
activities and death throughout the oceans (Benfield
et al., 2007). Plankton mediate the flow of carbon
from the atmosphere to the oceans and strongly in-
fluence aquatic bio-geochemical cycling and nutrient
budgets. The response of planktonic ecosystems to
global climate change is being documented in decadal
changes in production levels, plankton community
composition, and carbon flux through the ocean (Hays
et al., 2005; Honjo et al., 2008).
To formulate predictive models of future marine
communities and their influence on oceanic seques-
tration of atmospheric CO
2
, oceanographers require a
large amount of spatially and temporally variable data
on marine food webs and the cycling of carbon and
nitrogen through them. Automated analysis of plank-
ton and particle imagery collected worldwide would
provide the necessary data stream.
Identification of marine populations is a funda-
mentally challenging research. Living organisms and
non-living particles come in significantly diversified
shapes and may undergo highly articulated motions.
A number of organisms are microscopic. Particles are
continuouslydrifting. Added to the problem is getting
high quality images when both sensors and objects
may be moving and the medium is an unstable flow
of water current. Manually labeling these complex
scenes is not only very laborious and time consuming,
but also very difficult even for human experts. In one
study expert marine scientists agreed on labels only
75-80% of the time (Culverhouse et al., 2003).
We believe that marine biologists can benefit from
an application of recent Computer Vision techniques.
Meanwhile, marine imaging provides a new data
source with distinctive characteristics that may not be
represented in other data sets. As discussed in (Ponce
et al., 2006), databases currently available and com-
monly used for evaluating multi-class categorization,
e.g. the Caltech set, lack irregularities within a single
category. By contrast, taking an average over all im-
ages of each class in our marine data (examples shown
in Figure 1) reveals high intra-class variations. Ob-
jects exhibit no conformity in size, shape, pose, or
orientation. They do not share a uniform location. Vi-
401
Silapachote P., R. Stolle F., R. Hanson A. and Pilskaln C. (2010).
CLASSIFICATION OF CHALLENGING MARINE IMAGERY.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 401-406
DOI: 10.5220/0002835304010406
Copyright
c
SciTePress

Figure 1: Average images of chain colonial radiolarians
(left) and marine snow from our data set. See Figure 4 for
individual samples. Images throughout this paper are en-
hanced for display by inverting and/or adjusting brightness.
Figure 2: Images from FlowCAM (left) and VPR (right).
sually recognizing marine species from their average
images is extremely difficult, if not impossible.
We applied two very different techniques to au-
tomatically label taxonomic categories of challenging
marine images. The first, referred to as the traditional
approach, is common in the machine vision commu-
nity. Processing involves image segmentation, com-
pact feature vector representation, followed by classi-
fication. Through many years of research, segmenting
an image has remained a non-trivial problem. Solu-
tions are usually not well-defined and most often are
highly dependent on specific data sets and their appli-
cations. Given the unique characteristics of our plank-
ton images, we propose a novel segmentation tech-
nique that is capable of effectivelyhandling very com-
plex underwater scenes of microscopic organisms.
The second approach, referred to as the biological
approach, is based on (Serre et al., 2005) and is in-
spired by the success of sophisticated visual systems
in primates. With only 2 main computations, correla-
tion mimicking simple cells and maximization mim-
icking complex cells, the model is relatively simple.
Features are constructed from randomly selected im-
age regions. Neither segmentation nor focus of atten-
tion is necessary. Unlike the traditional approach, this
domain independent trait makes the biological system
effectively generalizable. This benefit comes with a
high computational cost, which is far from being real-
time. Investigation of the model complexities led to
modifications that resulted in a substantial computa-
tional reduction and an improvementin classification.
2 RELATED WORKS
2.1 Plankton Classification
Two of the most related works are (Blaschko et al.,
2005) and (Lisin, 2006). Blaschko et al. employed a
variety of existing features and classifiers. They iden-
tified plankton in images obtained using a Flow Cy-
tometer And Microscope, FlowCAM (Sieracki et al.,
1998), on which their accuracy was 72.61%. Lisin
studied a kernel density estimation on local bags of
features and proposed a methodology combing multi-
ple global and local features. His algorithm improved
the results obtained by Blaschko et al. on the same
FlowCAM data, achieving 74.84%. He also applied
his technique to images obtained using a VPR (Video
Plankton Recorder), reporting 71.90% accuracy.
Here, we look at a difficult set of video sequences
of several species of tiny underwater organisms (re-
fer to Section 5 for a complete detail). Our images
were obtained using an older VPR that exhibited sig-
nificantly greater noise than the VPR used by Lisin.
There are significant differences among the three
marine image sets: FlowCAM, Lisin’s, and our VPR.
Samples of actual images used by Blaschko et al. and
Lisin are shown in Figure 2. Images are mostly well
conditioned. An organism is clearly presented as fore-
ground, though some are partially cropped, and fine
details are apparent. A relatively high contrast sim-
plifies background separation and segmentation.
By comparison, as evidenced in Figure 4, our im-
ages are particularly challenging due to variations
within and between classes, as well as low image
quality and limited resolution. The data exhibit a low
signal-to-noise ratio and significant correlated noise.
Detecting and classifying objects are rather difficultin
these images even by humans. Organisms are mostly
localized and typically occupy only small regions.
Many are not captured in their entirety. A number of
organisms are translucent resulting in regions that are
combinations of foreground and background. Some
are distributed, appearing as separate particles, often
in extremely diversified shapes.
2.2 Biologically Inspired Vision System
Primate effortlessly perceive and efficiently use vi-
sual cues to extract reliable information from less than
pristine data. How this fascinating process is exe-
cuted has long been an intriguing question in multiple
disciplines, most notably, neuroscience, physiology,
and psychology. Early pioneers, (Hubel and Wiesel,
1959) discovered simple and complex cells and de-
scribed them as edge detectors. Spatially larger, com-
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
402

Figure 3: Our segmentation applied to two examples of marine images, one on each row, side by side with results of the
technique used by (Lisin, 2006). Shown from left to right are the original image, the intermediate and the final results of
Lisin’s approach, and results of our three-step approach, after noise removal, candidate segmentation, and grouping. While
Lisin’s technique fails on these images, our approach successfully segments both organisms from their background.
plex cells are less sensitive to transitional changes.
Later, (De Valois and De Valois, 1988) suggested a
profile of receptive fields of simple and complex cells,
a structure that resembles Gabor functions.
A model of a biologically feasible vision system
was designed by (Riesenhuber and Poggio, 1999).
They emphasized the two fundamentals: specificity
and invariance. Their hierarchical model, HMAX,
consisted of linear S layers performing template
matching and nonlinear C layers performing a MAX-
like pooling. They introduced and detailed how the
MAX operation could be a key mechanism for invari-
ance when building complex cells from simple cells.
Serre et al. extended HMAX beyond the cortical
neurons (Serre et al., 2005). On commonly used data
sets, this enhanced system, referred to as the Standard
Model (more detail in Section 4), performed competi-
tively with respect to other state-of-the-art techniques.
3 TRADITIONAL APPROACH
3.1 Image Segmentation
A customized segmentation is developed to overcome
the challenges associated with the data. After signif-
icant exploration of alternative methods, the best re-
sults (Figure 3) are obtained using a 3-step approach:
noise removal, candidate segmentation, and grouping.
Fractional spline wavelet filtering (Blu and Unser,
2003) is employed to clean up noise. A wavelet trans-
form of an image is computed, then thresholded on
the coefficients. A single threshold is empirically de-
termined for all images in the set. Finally, the image is
reconstructed from its thresholded wavelet transform.
A wavelet degree of 3 is used with a threshold of 50.
Noise removal is followed by a segmentation al-
gorithm originally developed to count nuclei in digital
microscopic images (Byun et al., 2006). This candi-
date segmentation consists of 4 steps: median filter-
ing, thresholding, watershed filtering, and size filter-
ing. Median filtering with a 5x5 window is performed
to remove more of the remaining noise. Automatic
thresholding attempts to find an optimal threshold by
minimizing intra-class variance with respect to parti-
cles and background. The resulting binary image is
processed with watershed filtering and a morpholog-
ical opening operator to remove spurious small parti-
cles, then a size filter is applied to remove very large
(>5000 pixels) and very small (<5 pixels) particles.
The last step groups all candidate particles within
a certain radius, increasing the particle area and at-
tempting to restore coverage for areas that were re-
moved in previous steps. This improves segmentation
as translucent parts of many organisms are initially re-
moved. However, a sufficient number of widely dis-
tributed parts still remain to indicate the outline of the
particle. A grouping distance of 50 pixels is used,
based on image resolution and expected object size.
3.2 Feature Extraction and
Classification
Several types of features are extracted after segmenta-
tion: simple shape descriptors, moments, contour rep-
resentations, texture features, and shape indices. This
set is similar to the set used in (Blaschko et al., 2005).
Simple shapes, computed from each of the seg-
mented particles, include area, perimeter, compact-
ness, ratio of eigenvalues, eccentricity, rectangular-
ity, and convexity. Grayscale moments computed are
mean, variance, skewness, and kurtosis. In addition,
moment invariants as defined by (Hu, 1962) over bi-
nary as well as original grayscale images are used.
A set of texture descriptors is derived from co-
occurrencematrices coveringthe segmented particles.
A co-occurrence matrix is a two-dimensional his-
togram that tracks the number of occurrences of pairs
CLASSIFICATION OF CHALLENGING MARINE IMAGERY
403

of graylevels at each horizontal and vertical displace-
ments. From these matrices, energy, inertia, entropy,
and homogeneity (Haralick, 1979) were calculated as
features. Other texture descriptors were local binary
patterns (Ojala et al., 2002), derived by calculating a
circle of points around a center pixel and assigning
binary weights to the signs of the differences between
these pixels and the center pixel. These patterns are
calculated for each pixel in the segmented particle and
are accumulated into a histogram of counts. Normal-
izing by object size yields the features used.
Shape indices are effective global differential im-
age descriptors for object recognition (Ravela, 2003).
They are functions of the isophote and flowline curva-
tures of the image intensity surface, which are com-
puted using Gaussian derivative filters. Shape indices
are computed for every pixel in the image, including
background. Histograms of individual shape indices
are calculated and used as features.
Classification is done using a Support Vector Ma-
chine (SVM) with a third order polynomial kernel.
The results are based on 10-fold cross validation.
4 BIOLOGICAL APPROACH
The Standard Model (Serre et al., 2005), a framework
for constructing a set of image features, is designed to
be consistent with the structure commonly agreed to
exist in the immediate visual processing of primates.
Primates have a remarkable ability to recognize
an object that has undergone various transformations,
such as affine and perspective projections, or extreme
changes in lighting conditions, and to distinguish sim-
ilar objects belonging to different categories. Un-
derlying this effectiveness is a balance between se-
lectivity and invariance. The Standard Model mim-
ics these mechanisms by interleaving simple S with
complex C layers in a hierarchical feedforward archi-
tecture. Simple cells perform selectivity, responding
strongly only to patterns they are tuned to. Complex
cells are tolerant to changes in scale and translation.
They nonlinearly combine activations and inhibitions
from multiple similarly tuned simple cells.
This structure supports a gradual increase in com-
plexity and invariance of neurons as well as the size of
their receptive fields along the visual pathway. While
progressing from primitive tokens to defined shapes
and forms, MAX pooling covers larger image regions.
4.1 The Four-layer Standard Model
The first layer, S1, resembles simple cells in V1 that
process spatial frequency information. S1 is modeled
by Gabor filters, extracting edge-like features at 16
scales and 4 orientations. The second layer, C1, simu-
lates complexcells. Neighboring scales and neighbor-
ing pixels of S1 maps are combined using a MAX op-
erator. Subsampling these responses creates C1 maps.
During training, image patches are randomly ex-
tracted from a number of randomly selected C1 maps.
Given an unknown input image, locating an area that
best matches with each of these patches is a process
in S2 and C2. A patch is convolved with C1 maps
of the input, generating S2 maps. Maximizing across
all scales and positions results in a C2 value. Intu-
itively, a feature value indicates how similar a region
in an image is to a particular patch. This procedure
is repeated for every patch, thus constructing for each
input a feature vector of length equal to the number
of training patches extracted. Feature vectors are then
classified using a supervised one-against-one SVM.
4.2 Modification to the Standard Model
One drawback of the Standard Model is its high com-
putational cost precluding real-time operation. Addi-
tionally, with the amount of randomness involved, an
experiment needs to be run repeatedly in order to ob-
tain good statistical estimates. Empirically tracing the
computations, the bottleneck is in correlating training
patches with images. We apply two approaches to re-
duce the number of patches and thus overall compu-
tational cost without sacrificing performance.
Overlaps among Image Patches. Given the size of
an image and a patch, there is a limited number of
patches, n, that can be extracted so no patches overlap,
for example, n is 12 when extracting 32×32 patches
from a 128×96 image. Partial overlaps capture differ-
ent views or different parts of an image and how they
are fused together. Excessive overlaps, on the other
hand, lead to unnecessary duplicates and increase de-
pendency among patches. We prevent an image from
being overly represented with overlapping regions by
extracting a maximum of n patches per image. Instead
of exclusively selecting non-overlapping patches, we
maintain random selection allowing partial overlaps.
Information Contained in an Image Patch. Gen-
erally, a classifier needs to be trained on both fore-
ground and background information. A few back-
ground patches are necessary, but not so many that
they significantly increase computations and intro-
duce bias. Our marine data is sensitive to the lat-
ter problem due to uniform underwater background
and organisms occupying only a small area on an im-
age. A large number of extracted regions, especially
smaller ones, are exclusively background.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
404
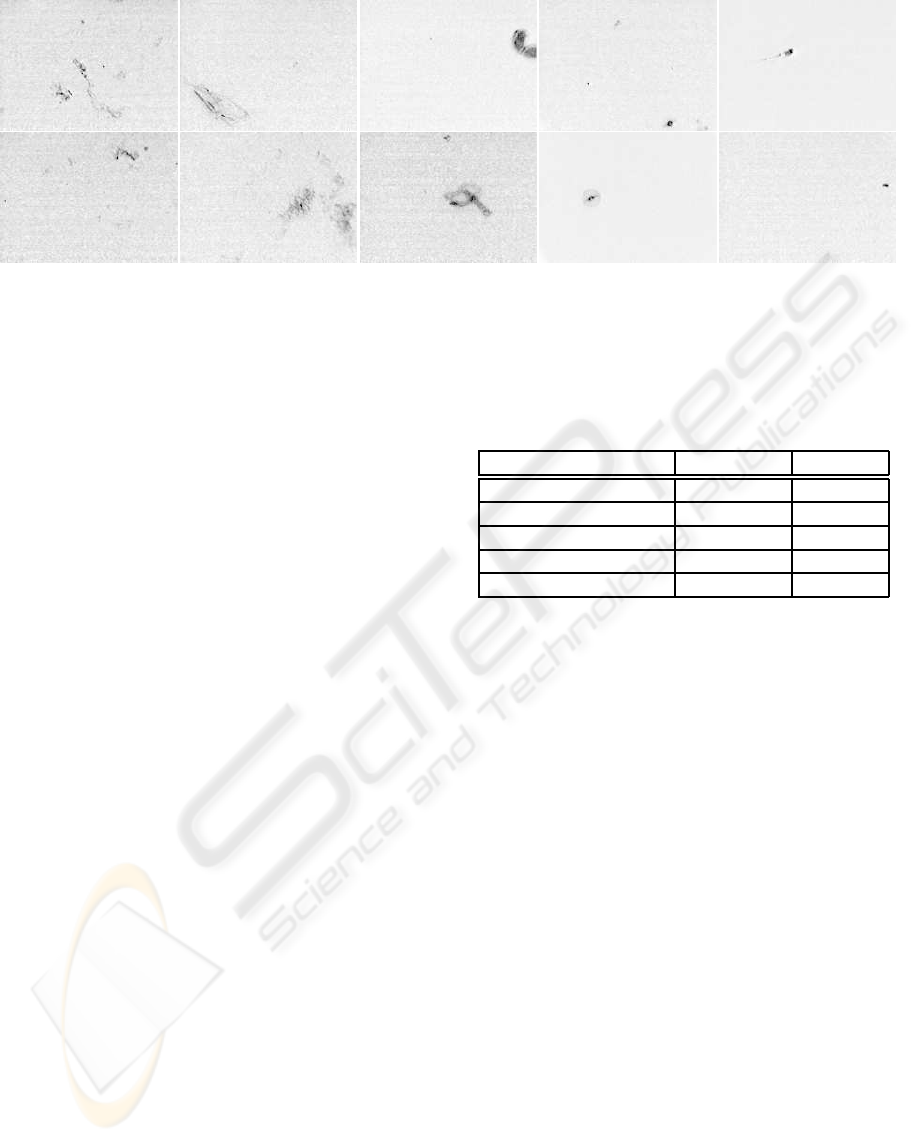
Figure 4: Sample images of our marine data: each column shows two images from each of the five classes, from left to right,
algal aggregates, Rhizosolenia mats, chain colonial radiolarians, single sphere colonial radiolarians, and marine snow.
We measure information content using entropy.
High entropy signals a heterogeneous field, an indica-
tion of activities. These patches likely contain at least
a partial object. A patch with low entropy appears as
a homogeneous field, containing no information on
either objects, background, or their border relations.
Therefore, it is safe to exclude low-entropy patches
from a feature set. We eliminate 30% of patches with
the lowest entropy and use the rest as actual templates.
4.3 Implementations
Our Matlab implementation is based on (Serre et al.,
2005), in which preprocessing includes resizing every
image so its height is 140 pixels and its aspect ratio is
preserved. S1 and C1 parameters are left unchanged.
Training patches are extracted from C1 maps at the
second to the finest scale of Gabor filters. Patches are
square; 4, 8, 12, and 16 pixels. From a training image,
32 patches are randomly selected, 8 of each size.
A data set is randomly divided into disjoint sets
for training and testing. There are 30 training images
from each class. The rest of the images from a class
with less than 80 images form a test set. Otherwise,
50 test images are chosen. Accuracies are averages
over 25 runs, all of which have different sets of ran-
domly chosen training and testing images. The errors
indicate 95% confidence interval of the mean values.
5 MARINE DATA SETS
The Pacific VPR imagery was collected in the North
Pacific Subtropical Gyre during an August-September
2003 research cruise, which was part of NSF-funded
projects to examine oceanic nitrogen cycling as in-
fluenced by marine diatom and algal aggregate dis-
tribution (Pilskaln et al., 2005). The slowly towed
VPR was lowered 150m from the surface. This un-
Table 1: Classification accuracies and running times. Each
runtime is for a single experiment including on-line feature
computations and classifications, but excluding off-line pre-
processing steps; image segmentation for the traditional ap-
proach and Gabor filtering for the biological approach.
Experiment Specific Accuracy % Time min
Traditional Approach 76.69 40.83
The Standard Model
no modification 78.16±1.11 251.44
patch overlap 79.96±1.16 149.13
overlap and entropy 80.73±1.03 116.88
derwater video microscope system captured images
at 60Hz. An interlaced scan pattern with odd/even
fields is used. Due to rapid movements of both the
imaging system and objects imaged, raw individual
fields are interpolated. After post-processing, images
are resized to a resolution of 640×480 pixels.
The data set contains 488 images of marine organ-
isms hand-selected and hand-labeled by oceanogra-
pher experts; examples are shown in Figure 4. Two of
the 5 classes are phytoplankton: algal aggregates and
Rhizosolenia mats. Two are protozoan zooplankton:
chain colonial radiolarians and single sphere colonial
radiolarians. The fifth class is marine snow (organic
detritus). Phyto- and zooplankton are living plant and
animal that drift in the water. Detritus are non-living
particles sinking to the bottom layers of the ocean.
6 RESULTS AND DISCUSSIONS
Classification accuracies along with running times of
the experiments are reported in Table 1. Comparing
the traditional approach with the biological model and
its variants, the former has much lower computational
cost, allowing images to be categorized more quickly.
Both approaches accomplish classification accuracies
between 76-80%. Given a 75-80% labeling agree-
CLASSIFICATION OF CHALLENGING MARINE IMAGERY
405

ment between expert biologists and 71-75% accura-
cies from similar works by (Blaschko et al., 2005)
and (Lisin, 2006), our techniques perform very well
on this very complex marine data set.
We compare the performance of the Standard
Model with no modification versus when the number
of extracted training patches is limited. The latter re-
duces running time by over 40%. Not only is the com-
putational cost significantly lower, but also the clas-
sification results improve (using t-statistic confirms
a significant difference at a 95% confidence level).
These results suggest that, without modification, over-
lap among patches contains redundant information
and decreases the separability among classes.
Measuring the information content of patches us-
ing entropy effectively removes patches that contain
little to no information relevant to a categorization.
The difference between the two accuracies, both with
overlapping patches constraint applied, but with and
without the use of entropy to select patches, show no
statistical significance. The system performs equally
well with 30% less features (without lowest-entropy
training patches), a significant saving of a computa-
tional cost. The running time with the entropy selec-
tion process is reduced by over 20% compared to the
system just using constrained patch overlap and by
over 50% compared to the original Standard Model.
7 CONCLUSIONS
The potential of an artificial vision system based on
biological principles is shown to be quite promising.
A crucial advantage is its independence of image seg-
mentation, a potentially high complexity processing
step. When experimenting with the Standard Model,
we were able to apply it, without re-tuning, and ob-
tain accuracies as good as or better than a traditional
approach, indicating good generalization capability.
To our knowledge, this is the first study that ap-
plied a biologically inspired model to a difficult un-
derwater imaging domain. Our experimental results
offer great promise for the analysis of large marine
image data sets collected from unique open-ocean
ecosystems. Automatic identification and quantifica-
tion of the plankton and particle components, coupled
with chemical and taxonomic composition analysis,
will facilitate the production of a refined carbon and
nitrogen budgets for this vast region, significant to our
understanding of how climate change affects the dy-
namics of ocean ecosystems.
ACKNOWLEDGEMENTS
This work was supported by NSF (OCE-0325167).
REFERENCES
Benfield, M. et al. (2007). RAPID: Research on automated
plankton identification oceanography. Oceanography.
Blaschko, M. et al. (2005). Automatic in situ identification
of plankton. In Proc. IEEE WACV, pages 79–86.
Blu, T. and Unser, M. (2003). A complete family of scaling
functions: The (α, τ)-fractional splines. In Proc. IEEE
Intl. Conf. Acoustics, Speech, and Signal Processing.
Byun, J. et al. (2006). Automated tool for the detection of
cell nuclei in digital microscopic images: Application
to retinal images. Molecular Vision, 12:949–960.
Culverhouse, P. et al. (2003). Do experts make mistakes?
A comparison of human and machine identification of
dinoflagellates. Marine Ecology Progress Series, 247.
De Valois, R. L. and De Valois, K. K. (1988). Spatial Vision.
Haralick, R. M. (1979). Statistical and structural approaches
to texture. Proceedings of the IEEE, 67(5):786–804.
Hays, G. C., Richardson, A. J., and Robinson, C. (2005).
Climate change and marine plankton. Trends in Ecol-
ogy and Evolution, 20(6):337–344.
Honjo, S., Manganini, S., Krishfield, R., and Francois, R.
(2008). Particulate organic carbon fluxes to the ocean
interior and factors controlling the biological pump:
A synthesis of global sediment trap programs since
1983. Progress In Oceanography, 76(3).
Hu, M. (1962). Visual pattern recognition by moment in-
variants. IEEE Trans. Information Theory, 8:179–187.
Hubel, D. and Wiesel, T. (1959). Receptive fields of single
neurons in the cat’s striate cortex. J. of Physiology.
Lisin, D. A. (2006). Image Classification with Bags of Local
Features. PhD thesis, Univ. of Mass., Amherst, MA.
Ojala, T., Pietik¨ainen, M., and M¨aenp¨a¨a, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE PAMI.
Pilskaln, C. et al. (2005). High concentrations of marine
snow and diatom algal mats in the north pacific sub-
tropical gyre: Implications for carbon and nitrogen cy-
cles in the oligotrophic ocean. Deep Sea Research.
Ponce, J. et al. (2006). Dataset issues in object recognition.
In Towards Category-Level Object Recognition.
Ravela, S. (2003). On Multi-Scale Differential Features and
their Representations for Image Retrieval and Recog-
nition. PhD thesis, Univ. of Mass., Amherst, MA.
Riesenhuber, M. and Poggio, T. (1999). Hierarchical mod-
els of object recognition in cortex. Nat. Neurosci.
Serre, T., Wolf, L., and Poggio, T. (2005). Object recogni-
tion with features inspired by visual cortex. In Proc.
IEEE CVPR. http://cbcl.mit.edu/software-datasets.
Sieracki, C., Sierackia, M., and Yentsch, C. (1998). An
imaging-in-flow system for automated analysis of ma-
rine microplankton. Marine Ecology Progress Series.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
406
