
SEGMENTING COLOR IMAGE OF PLANTS WITH
A SPATIO-COLORIMETRIC APPROACH
Cindy Torres, Alain Clément and Bertrand Vigouroux
Université d’Angers, Laboratoire d’Ingénierie des Systèmes Automatisés (EA 4014)
Institut Universitaire de Technologie, 4 Bd Lavoisier, BP 42018 - 49016 Angers Cedex, France
Keywords: Color, Spatial Organization, Classification, Segmentation, Plants.
Abstract: An unsupervised vectorial segmentation method using both spatial and color information is presented. To
overcome the problem of memory space, this method is based on a multidimensional compact histogram
and an original compact spatial neighborhood probability matrix (SNPM). The multidimensional compact
histogram allows a drastic reduction of memory space without any data loss. Leaning upon the compact
histogram, a SNPM has been computed. It contains all non-negative probabilities of spatial connectivity
between pixel colors. In an unsupervised histogram analysis classification process, two phases are
classically distinguished: (i) a learning process during which histogram modes are identified and (ii) a
second step called the decision step in which a full partition of the colorimetric space is carried out
according the previously defined classes. During the second step of a standard colorimetric approach, a
colorimetric distance like Euclidean or Mahalanobis is used. We insert here a spatio-colorimetric distance
defined as a weighed mixture between a colorimetric distance and the spatial distance calculated from the
SNPM. The vectorial classification method is based on previously presented principles, achieving a
hierarchical analysis of the color histogram by means of a 3D-connected components labeling. Results are
applied to color images of plants to separate plantlets and loam.
1 INTRODUCTION
Segmentation is an important step in the image
processing chain for identifying and partitioning the
different regions of interest in an image. Classically,
the algorithms for segmenting images can be divided
into two families: the ones using the image plane
spatially and the others using the color distribution
of the pixel in the selected color space.
In color images, a pixel is considered as a three-
dimensional (3D) vector whose components depend
on the color space used. When color distribution is
chosen, it is supposed that colors of homogenous
regions give rise to clusters in the color space, each
of them corresponding to a class of pixels. The
different classes are obtained by a cluster analysis or
by means of a color mode detection method
generally based on color histograms. This procedure
assigns each pixel of the image to a class depending
on its color. By connecting pixels from the same
class, regions are constituted.
The entire color information is frequently not
used because of the computation time required. That
is why, most color classification methods are based
on mono or bi-dimensional histograms regardless of
the correlation between color planes is lost. Trémeau
and Laget (Trémeau and Laget, 1995) have
demonstrated however, by the Shannon theory, that
using a multidimensional analysis is more
discriminatory than a mono-dimensional analysis.
To overcome the problem of memory space, Xuan
and Fisher (Xuan and Fisher, 2000) propose to
requantify the color scale by reducing the number of
bits for coding each color component. This
technique is efficient, but it performs an a priori
color classification.
Among segmentation methods using color space
classification, the ones relying on histograms
analysis have the advantage of being unsupervised
but have also the drawback of not taking into
account the spatial information. For the last few
years, a third family of segmentation methods has
appeared: spatio-colorimetric classification methods.
For some images, the loss of the spatial
information conducts to a false segmentation. That
problem was highlighted by Trémeau (Trémeau,
191
Torres C., Cl
´
ement A. and Vigouroux B. (2010).
SEGMENTING COLOR IMAGE OF PLANTS WITH A SPATIO-COLORIMETRIC APPROACH.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 191-196
Copyright
c
SciTePress

1993) and Macaire et al. (Macaire et al., 2006).
With natural color images, the classification
generally leads to an over-segmented image with
small regions scattered through the image. This may
be explained by the lack of correspondence between
some peaks in the color space and significant
regions in the image, or by the merging of too small
peaks with higher ones colorimetrically close but
corresponding to inhomogenous spatial regions. To
cope with these problems, original approaches
taking into account both spatial connectivity and
color information have been proposed by (Macaire
et al., 2006) (Foucher et al., 2001) (Trémeau, 1993)
(Busin et al., 2005) (Noordam and Broek, 2000)
(Comaniciu and Meer, 2002). They have developed
original supervised or not algorithms or fixed
important axioms.
These approaches are facing the double difficulty
of treating a huge quantity of information and
dealing with a high algorithmic complexity.
In this paper we present a new contribution to
unsupervised spatio-colorimetric classification. For
several years, our laboratory has been involved in
developing classification algorithm based on
multidimensional histograms (Clément and
Vigouroux, 2003), (Ouattara and Clément, 2008).
Thanks to the compact histogram (Clément and
Vigouroux, 2001) and an original compact spatial
neighborhood probability matrix, a new
unsupervised vectorial segmentation method taking
into account the full 3D histogram and the spatial
organization of pixels has been developed. This
method is based on a hierarchical analysis of the
histogram. In a standard colorimetric approach,
colorimetic t-uples are attributed to classes
minimizing a colorimetric distance like Euclidean or
Mahalanobis. We insert here a spatio-colorimetric
distance taking into account the information of
pixels neighborhood colors. This distance is defined
as a weighed mixture between a colorimetric
distance and the spatial distance calculated from the
spatial neighborhood probability matrix. The
vectorial classification method is based on the
spatio-colorimetric distance and achieves a
hierarchical analysis of the color histogram using a
3D-connected components labeling.
In a first part, the principle of the compact
histogram is explained and the spatial neighborhood
probability matrix is detailed.
Secondly, the hierarchical unsupervised
classification method is presented and the spatio-
colorimetric distance is defined.
In a third part, the classification method has been
applied to synthetic color images with different
spatio-colorimetric results according the weight
given to spatial and color information. Real images
of plants have been tested, in order to separate
plantlets and loam.
Finally, we discuss previously obtained results,
and propose further development taking into account
the spatial information, during the classification
process, both in the decision and in the learning
steps.
2 COMPACT HISTOGRAM
Segmentation methods based on the analysis of color
histograms are facing the difficulty of treating a
huge quantity of information. For a color image of
resolution NM with each component coded on 8
bits, a standard 3D histogram is an array of 2
24
cells,
the number in each cell being coded on at least
log
2
(MN) bits in order to store the greatest number
of pixels. In the case where M=N=256, the standard
3D histogram requires 128 Mo.
A few years ago, we proposed a new way of
coding the nD histograms, leading to the so-called
compact histogram (Clément and Vigouroux, 2001).
Considering that most cells of the standard
histogram are empty, the compact histogram retains
only the C occupied cells. It consists of two arrays
(figure 1): an array of size C×3 to store the colors,
sorted out in lexicographical order, and an array of
size C×1 for the corresponding populations of
pixels. Since C is lower than MN, the compact
histogram occupies less memory space, although it
contains the full color information present in the
image. For a 256256 image with color components
coded on 8 bits, the memory space required is less
than 500 ko.
R
G
B
population
0
0
5
13
0
0
23
5
...
...
...
...
255
10
0
21
255
251
254
3
Figure 1: Example of 3D compact histogram for a RGB
color image (8 bits per component).
3 SNPM
Taking into account previous researches in spatio-
colorimetric classification such as (Trémeau, 1993)
and (Macaire et al., 2006), it is interesting to have a
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
192
structure like a co-occurrence matrix, containing
color pixels neighbors information.
For a given spatial direction, a co-occurrence
matrix calculates how often a pixel with a color c
occurs adjacently to a pixel with a color c. Other
spatial relationships between pixels may be
specified. That kind of structure is generally used to
analyze grey levels textures. Without any
requantization, a memory space of 256
2
cells is
occupied.
A color image presents a maximum of 256
3
colors, its corresponding standard co-occurrence
matrix will have 256
6
cells. Let C be the number of
different colors in an image, C is usually lower than
256
3
. Nevertheless, a co-occurrence matrix with C
2
cells requires a huge memory space. That is why a
Spatial Neighborhood Probability Matrix (SNPM),
requiring a reduced memory space, has been
proposed.
This matrix specifies the probability to find a
pixel with the color c in the neighborhood of a
pixel with the color c, knowing that we have this
pixel with the color c.
Given a color pixel p
c
, the neighborhood v
d
(p
c
)
is the set of all pixels whose distance from p
c
is
equal to d. For d=1, this neighborhood is defined by
a 4 or 8 connexity. For d>1, a form (disk, square,
diamond…) defines the connexity. The full
neighborhood V(p
c
) is then defined as :
V ( p
c
) v
i
i1
d
( p
c
)
(1)
Let h
d
(p
c
) be the compact histogram associated
with v
d
(p
c
). A weighed histogram H(p
c
)
corresponding to V(p
c
) is defined as:
H( p
c
) h
i
i1
d
( p
c
) (1 d i)
(2)
where is a weighing operator which multiplies
each compact histogram h
i
populations. Thus in
V(p
c
), colors weights are higher when colors
correspond to pixels close to p
c
. If {c} is the set of
all pixels having the color c, H
c
is defined as:
H
c
H(p
c
j
j1
Card({ c
})
)
(3)
The SNPM is a cell array of size Cx1, with C the
number of different colors in the image. Each cell i,
1≤ i ≤C, contains the corresponding H
ci
whose
population has been normalized to 1 in order to
express probabilities. The probability P(c H
c
)
to find a pixel with the color c in the neighborhood
of a pixel with the color c in the image, is directly
given by the c entry of the histogram associated
with the c cell in the SNPM. By construction,
SNPM contains C compact histograms, each
histogram having less than C cells. Memory space
required by SNPM is lower than the one required by
a co-occurrence matrix, even coded in a compact
form with C
2
cells.
The spatial distance ds(c, c) is defined from
SNPM as the minimum between [1-P(c H
c
)]
and [1-P(c H
c
)].
4 HIERARCHICAL
CLASSIFICATION
The classification process through an unsupervised
analysis of color histograms is an original 3D
extension of the 2D limited method proposed in
(Clément and Vigouroux, 2003). Colors
classification is carried out in two steps: the learning
step and the decision step.
The learning step is a hierarchical decomposition
of populations in the 3D histogram. For each level of
population p
n
, peaks P
i
are identified by a connected
components labelling process: first, the color
compact histogram is thresholded for populations
greater than or equal to p
n
and a binary 3D matrix is
reconstructed in the same way as a standard
histogram but with only one bit per cell. Secondly,
the binary matrix is labelled in 3D connected
components. Each peak identified by a connected
component is then iteratively decomposed into
narrower peaks, beginning from population 0.
Thanks to (Ouattara and Clément, 2008), the
algorithm considers only existing populations in the
compact histogram, jumping from one to the next in
ascending order. A peak is then labelled as
significant if it represents a population greater than
or equal to a threshold S (expressed in percent of the
total population in the histogram). The procedure is
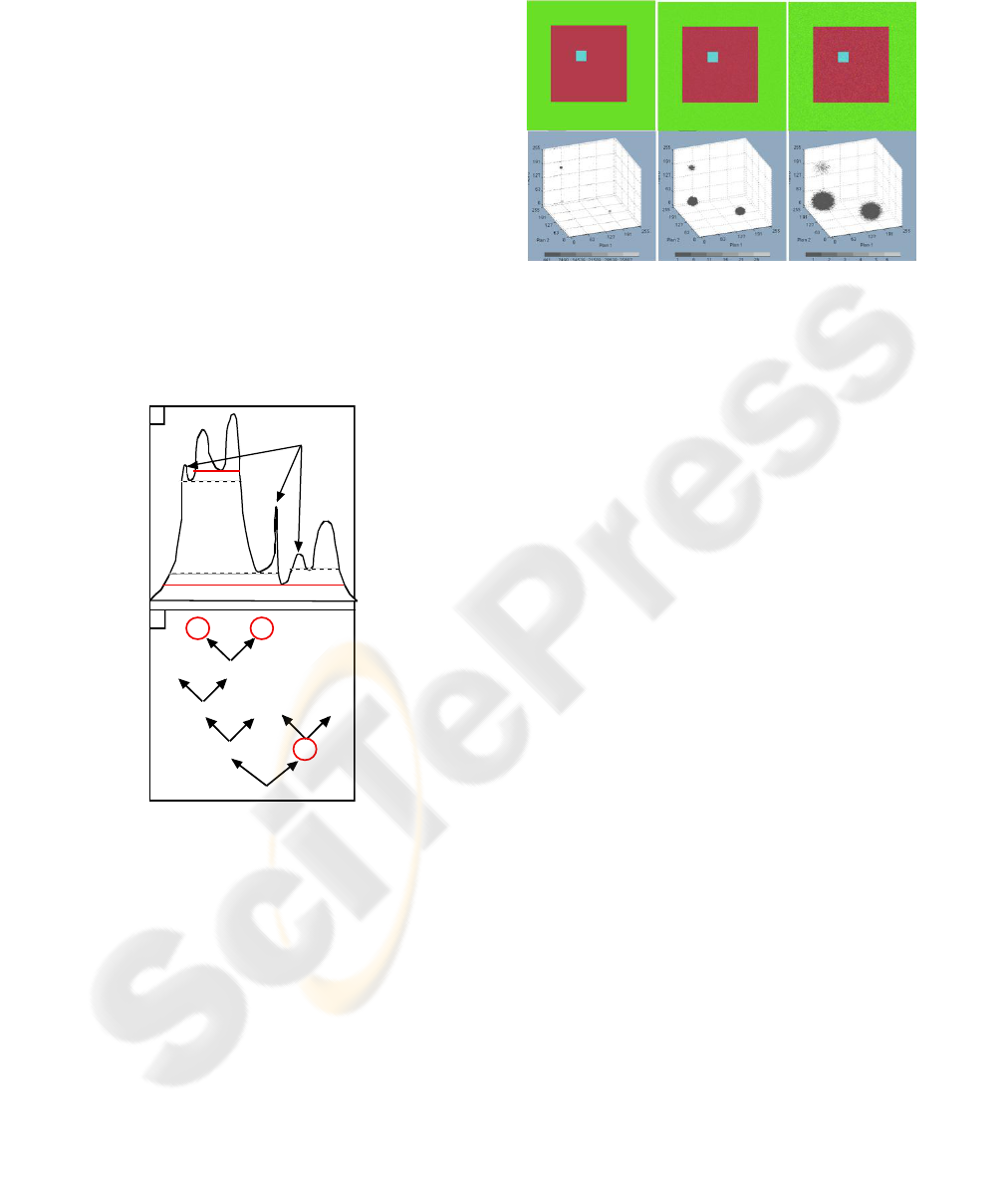
illustrated in figure 2 (drawn in one dimension for
clarity). We shall name kernels K
i
the peaks
corresponding to circled leaves in part b of figure 2.
In other words, kernels are significant peaks (part of
figure 2) without descendants in the hierarchical
decomposition tree (e.g., figure 2 shows five
significant peaks P
i
(i = 0 to 4) and three kernels K
i
(i = 2, 3, 4)). The number of classes N
c
is taken
equal to the number of kernels (the class
corresponding to kernel K
i
is noted C
i
). Therefore N
c
depends on the threshold S, i.e. on the precision the
image colors are analyzed with.
SEGMENTING COLOR IMAGE OF PLANTS WITH A SPATIO-COLORIMETRIC APPROACH
193
In the decision step, the mass center µ(K
i
) of
each kernel K
i
is calculated in the color space. Let us
denote by c the color corresponding to the point of
coordinates (r,g,b) in the color space. Two cases
appear: if (r,g,b) belongs to K
i
, color c is attributed
to class C
i
; if not, let us denote by P
k
the peak
(r,g,b) it belongs to; color c is attributed to class C
i
corresponding to kernel K
i
, son of P
k
, such that
d[µ(K
i
), (r,g,b)] is minimum, where d[c, c] is a
spatio-colorimetric distance between c and c.
The spatio-colorimetric distance (dSC) is
expressed by equation (4):
dSC(c, c) = ds(c, c) + (1-) dc(c, c) (4)
where dc(c, c) is a colorimetric distance between
c and c like Euclidean or Mahalanobis and
ds(c,c) the spatial distance as defined from the
Compact SNPM. , 0≤ ≤1, gives more or less
weight to the spatial or colorimetric information.
0
1
3
4
2
0
1
2
(
1
)
<S
3
4
<S
(
1
)
<S
(
2
)
peak population < S
a
b
Figure 2: An example of hierarchical decomposition. The
circled leaves (part b) correspond to significant peaks as
obtained at the end of the iterative decomposition (solid
lines in part a), whereas leaves marked < S (part b)
correspond to insignificant peaks (dotted lines in part a).
5 RESULTS
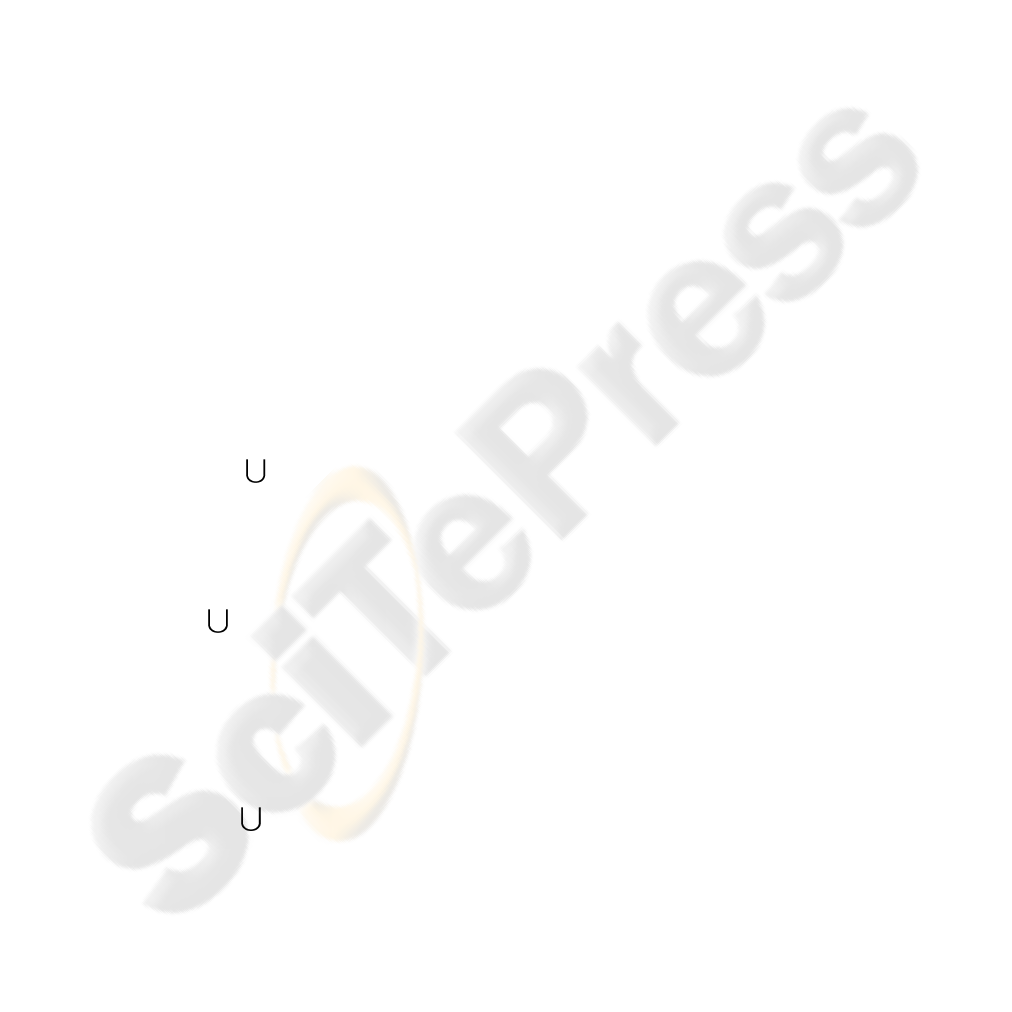
A synthetic RGB color image with 256x256 pixels,
coded on 24 bits (8 bits per component) each, is used
as a probe image to test the algorithm. This image is
composed of three regions with pure colors: 2
regions with an important population the red and the
green ones, and another composed of few pixels, the
blue one. As shown in the RGB histogram (figure
3,a2), the blue region is colorimetrically closer to the
green region than the red one.
(a1,a2) (b1,b2) (c1,c2)
Figure 3: This figure is composed of three images: a1, b1
and c1, and their corresponding histogram a2, b2 and c2.
Image a1 is the original probe color RGB image (8 bits per
component). Images b1 and c1 are corrupted probe
images; b1 is named lowNoise and c1 highNoise. In
histogram a2, the points have been enlarged for a better
visibility.
RGB-histogram (a2) reveals the presence of
three classes. In order to evaluate the interest of the
classification algorithm, the colorimetric
components of the probe image have been corrupted
by an additional uncorrelated Gaussian noise: being
N
mr
, N
mg
, N
mb
three matrices of marginal centered
noise with the same standard deviation = 0.02 for
the image lowNoise (figure3 b1) and = 0.05 for
the image highNoise (figure3 c1). The alteration of
the probe image constituted of the three colorimetric
planes P
r
, P
g
, P
b
is given by P
iN
=P
i
+N
mi
(i {r,g,b}).
Considering that the blue region’s population is
insignificant, threshold S (defined in the
Hierarchical classification part) has been adjusted
consequently.
Firstly, the classification algorithm has been run
with = 0 (defined in the Hierarchical classification
part) to neglect the spatial information. The
segmentation obtained is the same for the three
images, and is presented in figure 4(a). Two classes
have been identified, one corresponding to the green
region, another corresponding to the red region.
Insignificant blue values have been classified with
the green region that is colorimetrically the closest.
Secondly, has been adjusted to take into
account the spatial information ( > 0). The
neighborhood distance d (defined in the Compact
spatial neighborhood probability matrix part) has
been chosen to cover the blue region while
remaining inside the red region. Results are
presented in figure 4(b).
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
194

(a) (b)
Figure 4: (a) is the classification result of figure 3 (a1, b1
and c1) when = 0.
(b) is the classification result of figure 3 (a1, b1 and c1)
when > 0, and with a value of neighborhood distance d
covering the blue region.
The segmentation obtained is the same for the
three images. Two classes have been obtained, one
corresponding to the green region only, and the other
one merging the blue and the red regions. Spatially,
blue pixels are closer to red ones and so dSC (blue,
red) is lower than dSC (blue, green).
6 APPLICATION TO PLANTS
IMAGES
This classification method has been used to segment
plants images. Figure 5(a) is a RGB image of 7-day
lettuce plantlets, each pixel coded on 24 bits (8 bits
per component). It has been photographied with a
tri-CCD camera, and lettuces were highlighted with
a halogen lamp. The lettuce seeds are sowed on
loam. The loam is heterogeneous, that is one of the
difficulties to segment these images. With color
classification, some regions in the loam are
recognized as plants instead of loam. Figure 5(b) is a
zoom of figure 5(a).
(a) (b)
Figure 5: 7-day lettuce plantlets RGB image (a), with a
zoom (b).
Figure 6: Histogram (presented with the first two
dimensions only for a better visibility) of figure 5(b).
Color points corresponding to the small noisy regions
scattered in the loam, have been highlighted and pointed in
blue.
Figure 6 is the histogram (presented with the first
two dimensions only for better visibility) of the
image, the color points corresponding to the small
noisy regions scattered in the loam, have been
highlighted and pointed in blue. In the following,
these colors will be called color noise.
Firstly, the classification algorithm has been run
with = 0 to neglect the spatial information and
obtain a color segmentation. Threshold S has been
adjusted in order to ignore the small regions
scattered in the loam. The result is presented in
figure 7(a), with its corresponding 2D histogram in
figure 7(b). The color points (color noise)
corresponding to these insignificant regions were
colorimetrically closer to the green region (color of
the leaf) than the black region (loam). During the
second step of the classification, these colors have
been merged with the green class.
(a) (b)
Figure 7: (a) Color segmentation of image 6(b) with = 0.
(b) Histogram (presented with the first two dimensions
only for better visibility) of figure 7(a).
SEGMENTING COLOR IMAGE OF PLANTS WITH A SPATIO-COLORIMETRIC APPROACH
195

On another hand, has been adjusted to take into
account the spatial information ( > 0). The
neighborhood distance d (defined in the Compact
spatial neighborhood probability matrix part) has
been chosen to cover the small regions. Results are
presented in figure 8. Colors of the small regions
have been merged with the black class (loam)
because spatially, noisy pixels are closer to black
ones and so dSC (color noise, black) is lower than
dSC (color noise, green).
Figure 8: Spatio-colorimetric segmentation of figure 5(b).
7 DISCUSSION AND
PERSPECTIVES
Encouraging results have been obtained with the
proposed unsupervised vectorial hierarchical spatio-
colorimetric classification. However, the method
relies on two new parameters: and the
neighborhood distance d, which are difficult to fix
without an a priori knowledge of the image to be
segmented. The results obtained have shown
efficiency for a neighborhood covering small
regions, with insignificant population. These regions
cannot correspond to classes during the learning step
regarding threshold S. They are merged during the
second step, where the spatial information has been
introduced. The weight of the spatial information
depends on , which is correlated to the colorimetric
distance between these small regions and the others,
that is why both and distance d are difficult to
evaluate a priori.
Wider colorimetric regions could be treated
introducing the spatial information during the
learning step of the classification. Actually, if a
color population is high enough, it will be a kernel in
the histogram and will form a class. If this class does
not correspond to a spatial region, the problem
cannot be solved increasing the neighborhood
distance d. On the other hand, the hierarchical
decomposition of the histogram could be constrained
to form classes which satisfy a spatio-colorimetric
homogeneity criterion.
REFERENCES
Busin L., Vandenbroucke N., Macaire L., Postaire J.G.,
2005. Colour space selection for unsupervised colour
image segmentation by analysis of connectedness
properties. International Journal of Robotics and
Automation, 20(2):70-77.
Clément A., Vigouroux B., 2001. Un histogramme
compact pour l’analyse d’images multi-composantes.
Actes du 18ème colloque sur le traitement du signal et
des images GRETSI' 01, Toulouse, France, vol. 1, p.
305-307.
Clément A., Vigouroux B., 2003. Unsupervised
segmentation of scenes containing vegetation
(Forsythia) and soil by hierarchical analysis of bi-
dimensional histogram. Pattern Recognition Letters,
nº24, p. 1951-1957.
Comaniciu D., Meer P., 2002. Mean Shift: A Robust
Approach toward Feature Space Analysis. IEEE
Trans. Pattern Analysis Machine Intell., 24(5):603-
619.
Foucher P., Revollon P., Vigouroux B., 2001.
Segmentation d'images en couleurs par réseau de
neurones : application au domaine vegetal. Actes du
congrès francophone par vision par ordinateur
(ORASIS), Cahors, France, 309-317.
Macaire L., Vandenbroucke N., Postaire J.G., 2006. Color
image segmentation by analysis of subset
connectedness and color homogeneity properties.
Computer Vision and Image Understanding, Elsevier,
102:105–116.
Noordam J., Broek W.V.D., 2000. Geometrically guided
fuzzy c-means clustering for multivariate image
segmentation. International Conference on Pattern
Recognition, 1:462–465.
Ouattara S., Clément A., 2008. Unsupervised Image
Segmentation by Multi-Dimensional Compact
Histograms Analysis. ClasSpec’08, October 15th
2008, Lens, France.
Trémeau A., Laget B., 1995. Quantification de la couleur
et analyse d'image, Traitement du signal.
Trémeau A., 1993. Contribution des modèles de la
perception visuelle à l'analyse d'image couleur, PhD
thesis, University of Saint-Etienne, France.
Xuan G., Fisher P., 2000. Maximum likelihood clustering
method based on color features. Proceedings of the
First International Conference on Color in Graphics
and Image Processing, Saint-Etienne, France, p. 191-
194.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
196
