
SHAPE AND SIZE FROM THE MIST
A Deformable Model for Particle Characterization
Anders Dahl
†
, Thomas Martini Jørgensen
‡
, Phanindra Gundu
‡
and Rasmus Larsen
†
Technical University of Denmark, DTU Informatics Lyngby
†
, DTU Photonics Ris
‡
, Denmark
Keywords:
Particle analysis, Deconvolution, Depth estimation, Microscopic imaging.
Abstract:
Process optimization often depends on the correct estimation of particle size, their shape and their concen-
tration. In case of the backlight microscopic system, which we investigate here, particle images suffer from
out-of-focus blur. This gives a bias towards overestimating the particle size when particles are behind or in
front of the focus plane. In most applications only in-focus particles get analyzed, but this weakens the statisti-
cal basis and requires either particle sampling over longer time or results in uncertain predictions. We propose
a new method for estimating the size and the shape of the particles, which includes out-of-focus particles. We
employ particle simulations for training an inference model predicting the true size of particles from image
observations. This also provides depth information, which can be used in concentration predictions. Our
model shows promising results on real data with ground truth depth, shape and size information. The outcome
of our approach is a reliable particle analysis obtained from shorter sampling time.
1 INTRODUCTION
Visual inspection of particles is often essential for op-
timizing industrial processes. Examples can be parti-
cles in a dissolution, as for instance in a fermentation
process, or particles in gas, such as the coal particles
from a power plant. A vision-based system can pro-
vide knowledge about particle distribution, size and
shape, and these parameters are important for process
control. The choice of the analysis method and the
image quality affects the process control, and as a re-
sult both the analysis and image acquisition should be
chosen carefully.
The motivation of our work is an industrial endo-
scopic inspection system equipped with a probe that
can be placed inside the process
1
. Images are ac-
quired from the tip of the probe, which also contains
a light source placed in front of the camera. The
resulting camera setup depicts particles as shadows,
see Figure 1. Visual appearance of the particles de-
pends on the optical properties of the camera setup,
the distance of the particles to the focus plane, and the
physical reflectance properties of the particles. The
depth of field of the camera optics is narrow and the
particles get blurred as they move away from the fo-
cus plane, which introduces uncertainty of the particle
1
PROVAEN – Process Visualisation and Analysis EN-
doscope System (EU, 6
th
Framework)
(a) (b)
Figure 1: Examples of particle images. (a) spherical trans-
parent particles all 25 µm in diameter, and (b) a typical im-
age to be analyzed depicting spray particles.
characterization, see Figure 2. Employing a strategy
where only in-focus particles are analyzed can be a
good solution, but in situations with few particles or
short inspection time this approach will give an un-
certain estimate due to low sample size. As a conse-
quence it can be necessary to perform the analysis of
the blurred particles as well.
Deblurring. In a linear system the image formation
can be described as the linear convolution of the ob-
ject distribution and the point spread function (PSF).
Hence, to reduce the blur from out of focus light, ide-
ally the mathematical process of deconvolution can
be applied. However, noise can easily be enhanced if
one just implements a direct inverse operation, so the
36
Dahl A., Martini Jørgensen T., Gundu P. and Larsen R. (2010).
SHAPE AND SIZE FROM THE MIST - A Deformable Model for Particle Characterization.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 36-43
DOI: 10.5220/0002830500360043
Copyright
c
SciTePress

Figure 2: Illustration of the particles relative to the focus
plane. (a) particles in the 3D volume (b) can potentially
appear as a function of the distance to the focus plane.
inverse has to be regularized. Different regularizers
can be employed, for example iteratively deconvolv-
ing the image (Lucy, 1974), (Richardson, 1972), or
using a Wiener filter (Wiener, 1964). Alternatively,
a maximum entropy solution can be chosen, which
aims at being mostly consistent with data (Narayan
and Nityananda, 1986), (Starck et al., 2002). These
methods assume a known PSF. When this is not the
case, blind deconvolution can in some cases be ap-
plied recovering both the PSF and the deconvolved
image. Typically this is solved by an optimization
criterion based on known physical properties of the
depicted object (Kundur and Hatzinakos, 1996).
These methods are based on the assumption of
a known – possibly space-dependent – PSF for the
whole image. For many optical systems it is difficult
to calculate a theoretical PSF with sufficiently accu-
racy to be used for deconvolution. Also it can be quite
difficult to measure it experimentally with sufficient
resolution and accuracy. In our case the particles of
concern are illuminated from the back and in this re-
spect it resembles the case of bright light microscopy.
Such an imaging system is not exactly a linear de-
vice but in practice it is almost so. However, in the
bright field setting the ”simple” PSF is compounded
by absorptive, refractive and dispersal effects, making
it rather difficult to measure and calculate it.
Methods for local image deblurring, which is
needed for our problem, include iteratively estimat-
ing the blur kernel and updating the image accord-
ingly in a Bayesian framework (Shan et al., 2008).
Another approach is to segment the image and esti-
mate an individual blur kernel for the segments (Cho
et al., 2007; Levin, 2007). Blur also contains infor-
mation about the depicted objects. This has been used
by (Dai and Wu, 2008; Shan et al., 2007), where they
obtain motion information by modeling blur. With
a successful deblurring, e.g. based on one of these
methods, we will still have to identify the individual
particles. Instead, we suggest here to build a particle
model.
Particle Modeling. Most particles have a fairly
simple structure, typically being convex and close to
circular or elliptical. This observation can be used for
designing a particle model. In (Fisker et al., 2000)
a particle model is build for nanoparticles based on
images obtained from an electron microscope. An el-
liptical model is aligned with the particles by maxi-
mizing the contrast between the average intensity of
the particle and a surrounding narrow band. Particles
in these images are naturally in focus.
Ghaemi et al.(Ghaemi et al., 2008) analyze spray
particles using a simple elliptical model. However,
only in-focus particles are analyzed, and out of focus
particles are pointed out as a cause of error. In addi-
tion, they mention the discretization on the CCD chip
to be problematic, and argue that particles should be
at least 40-60 pixels across to enable a good shape
characterization.
Under the assumption that images are smooth and
by modeling the out of focus blur, we are able to ex-
perimentally show that we can obtain reliable shape
and size information from particles smaller than 40-
60 pixels in diameter. The main contribution of this
paper and the basis for our experiments is a parti-
cle model, which is used for characterizing particle
shape, size and blur. In Section 2 we describe our par-
ticle model and how it can be used for particle char-
acterization. We experimentally validate the particle
model in Section 3. Lastly, in Section 4 we discuss the
obtained results, and we conclude the work in Section
5.
2 METHOD
The goal of the proposed method is to obtain informa-
tion about the true size and shape of an out of focus
particle. Our idea is to learn particle appearance from
observations of particles with known position relative
to the focus plane. By comparing the appearance of
an unknown particle to the training set, we can predict
how the particle would appear, if it was in focus. As
a result we obtain information about the true particle
size and shape.
To facilitate this, the particles must be character-
ized in a way that describes the appearance as a func-
tion of blur well. Furthermore, particles should be
easy to compare. We will now give a short description
of how particles are depicted, and then explain the de-
tails of our particle model and descriptor. Finally we
describe the statistical model for depth estimation.
Experimental Setup. The particle analysis is based
on backlight where the particles appear as shadows.
Real image examples are shown in Figure 1 and Fig-
ure 2 illustrates the experimental setup. Notice that
all particles in Figure 1(a) are the same size of 25µm,
SHAPE AND SIZE FROM THE MIST - A Deformable Model for Particle Characterization
37
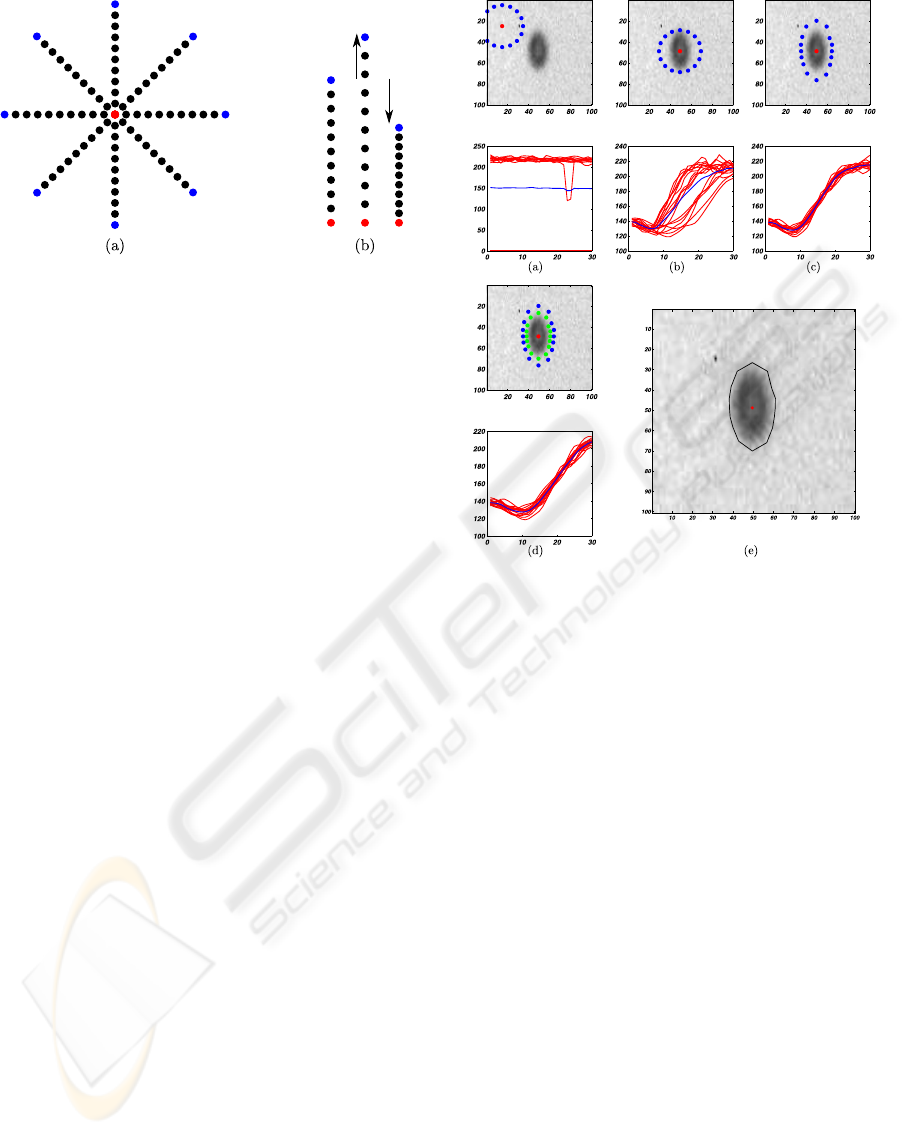
Figure 3: Intensity sampling with the particle model. Radial
sampling pattern of our model with 10 sampling steps from
the center point, marked with red, to the end of the radial
line marked with blue. There are 8 radial sampling lines in
this example (a). Each radial sampling line can be deformed
by stretching or compressing the line while keeping equal
distance between the sampling points (b). This stretch of
the individual sampling lines is what deforms our model.
but the blur makes them appear very different. Out of
focus blur occurs both in front and behind the focus
plane, but it is hard to tell if an observed particle is in
front or behind, because the blur looks the same. As
a consequence we have chosen to model the particles
as a function of absolute distance to the focus plan,
which is shown in Figure 2. In Section 3 we experi-
mentally show that these are reasonable assumptions.
Particle Analysis Model. The objective is to design
a model that encodes information about the particle’s
size, shape and blur. Our model is based on the obser-
vation that particles show close to radial symmetry. If
we sample along line segments from the center of the
particle, we expect to see the same intensity pattern or
a scaled version of this pattern. This is the idea that
we base our particle model on, which is illustrated in
Figure 3.
Our particle prediction is based on the following
Y = [s
t
, r
t
, d
t
]
T
= f (c
o
, r
o
, I
o
), (1)
where (c
o
, r
o
, I
o
) are the observed spatial position,
shape and image appearance respectively, f is the
function mapping observations to the vector Y con-
taining the model prediction (s
t
, r
t
, d
t
), which is the
true size, shape and distance to the focus plane. We
will now give the details of the particle model and
then explain how the parameters of this model are
used for predicting the particle characteristics.
We sample n radial lines form the center coor-
dinates c
o
placed with equal angle around the cen-
ter point. A particle descriptor is obtained by sam-
pling the image intensity along these radial lines at m
equidistant positions relative to the lengths of the ra-
Figure 4: Particle alignment and deformation. The image
shows the particle, the red dot is the center, and the blue
dots are the radial endpoints. The red curves show the in-
tensity pattern along the individual radial lines and the blue
is the average. The blob is initialized in (a), translated in
(b), deformed in (c), the size is found in marked with green
points (d) resulting in the segment in (e). Note that despite
a very poor initial alignment the model finds the object very
precisely. Also note how uniform the intensity pattern be-
comes by deformation.
dial lines. This intensity descriptor is denoted I
o
. The
length of the radial lines are stored in the r
o
vector,
which characterizes the particle shape.
Alignment with Image Data. Adapting the model
to the image observations is done in two steps. First
by changing the center position, which translates the
model, and secondly by changing the length of the
radial lines, which deforms the shape of the model.
Both operations will change the intensity descriptor,
which is utilized for finding an optimal particle char-
acterization. As a preprocessing step for noise re-
moval we convolve the image with a Gaussian kernel
with standard deviation σ.
The particle model has to be initialized by a rough
estimate of the particle size and position, e.g. us-
ing scale space blob detection, see (Lindeberg, 1994).
To obtain the center position of a particle we use an
optimization criterion based on radial symmetry and
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
38
intensity variance. The reasoning for the first crite-
rion is that particles are typically radially symmetric.
Based on that we initiate our particle model with ra-
dial lines of equal length. We expect the radial lines
to have highest similarity when they are sampled from
the particle center, also for particles that are not spher-
ically shaped. The variation criterion is based on the
fact that the intensity descriptor has high variation
when sampled on a particle and low otherwise. This
turns out to be very important for the robustness of
the alignment. The minimization problem becomes
argmin
c
η
n
∑
i=1
||I
i
−
¯
I||
− ξσ
¯
I
, (2)
where
¯
I is the mean intensity descriptor, and the
sum of normed descriptor differences is weighed by
η. σ
¯
I
is the standard deviation of the mean descriptor,
which is weighed by ξ. This alignment is optimized
by simple gradient decent, by moving in the steep-
est decent direction until an optimum is reached. The
procedure is repeated with finer step size, until a de-
sired precision is obtained.
After an optimal particle position has been found,
the particle shape is optimized to the image data by
changing the length of the radial sampling lines
argmin
r
n
∑
i=1
||I
i
−
¯
I||
, (3)
hereby minimizing the difference between the av-
erage descriptor and the individual radial descriptors.
This optimization is done similarly to the positioning,
also using gradient decent and refining the step size
when a minimum is reached. The length of the final
radial lines are normalized to sum to the same as orig-
inal radial lines lengths.
The particle model results in an observed charac-
terization as follows
x = {c
o
, r
o
, I
o
}, (4)
containing the center position denoted c
o
which
is a 2D vector, the length of the radial line segments
denoted r
o
which is a n-dimensional vector, and the
intensity pattern I
o
which is m-dimensional. It is esti-
mated as the mean I
o
=
1
n
∑
n
i=1
I
0
i
, where I
0
i
is the radial
pattern of line segment i. It should be noted that the
difference between the line patterns have been mini-
mized, so we model the remaining difference as noise,
and as a result the averaging will smooth this noise
and make the estimate robust.
Modeling the particle will create an independent
characterization of the size, shape and blur, which is
illustrated in Figure 3. Particle shape is encoded in
the length of the radial line segments, and the particle
size can be obtained from a combination of the radial
intensity pattern and the length of the line segments.
The intensity pattern I
o
has a shape that bends off to
become indistinguishable from the background, see
Figure 4, and the particle boundary is estimated at this
point. We found a function of the total variation to be
good way of estimating this. We estimate the total
variation as the sum of absolute differences of I
o
and
we obtain the distance as
r
o
= argmax
j
∑
m− j
i=1
||I
o
i
− I
o
i+1
|| − c
j
∑
m−1
i=1
||I
o
i
− I
o
i+1
||
!
j ∈ {1, ..., m − 1}, (5)
which is the normed total variation. The constant
c influences the estimated size of the particle.
Statistical Analysis. The blur is encoded in the ra-
dial pattern descriptor (I
o
), which we use as input for
estimating the distance to the focus plane. We use a
linear ridge regression to obtain the depth. The model
is d
f
= I
o
β
r
, where β
r
is the coefficients of the regres-
sion model. We obtain the model parameters from a
training set with known distance to the focus plane by
solving β
r
= (I
T
o
I
o
+ λI)
−1
I
T
o
d
∗
t
, where d
∗
t
is the dis-
tance of the training data. See for example (Hastie
et al., 2005) for a detailed description of ridge regres-
sion.
Table 1: Model parameters.
Parameter Value
Radial lines (n) 8
Sampling steps (m) 40
Sampling distance (pixels) 30
Length constant (c) 0.35
Gaussian blur - simulated (σ) 5
Gaussian blur - real (σ) 1
Radial similarty (η - Equation 2) 1
Variance weight (ξ - Equation 2) 4000
3 EXPERIMENTS
In this section we will experimentally show the per-
formance of our particle model. We want to investi-
gate the precision and accuracy of our model. By pre-
cision we mean how good our model is in predicting
the true size, shape and particle depth. The accuracy
refers to variation in the model predictions. The ex-
periments are conducted in relation to size estimation,
shape estimation and the particles distance to the fo-
cus plane. For these experiments we chose the param-
eter shown in Table 1. Furthermore, we investigate
SHAPE AND SIZE FROM THE MIST - A Deformable Model for Particle Characterization
39
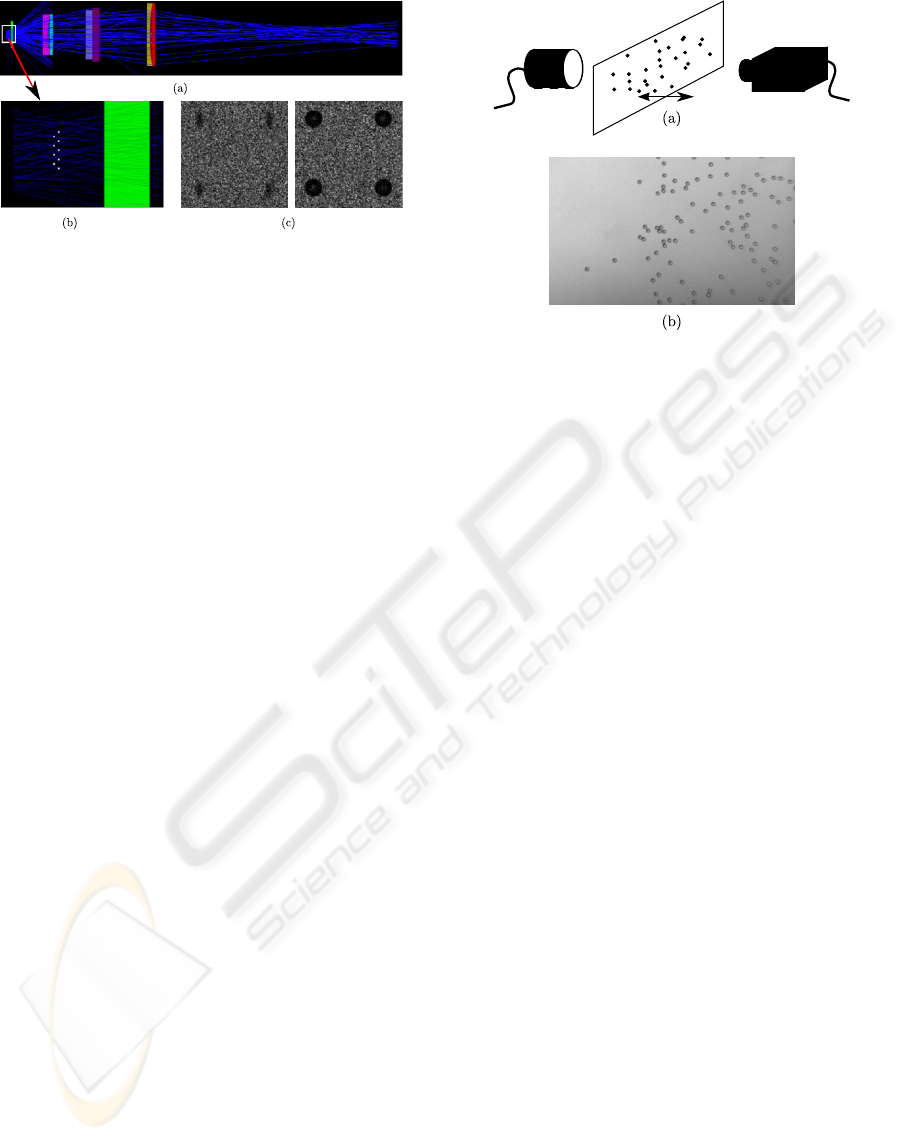
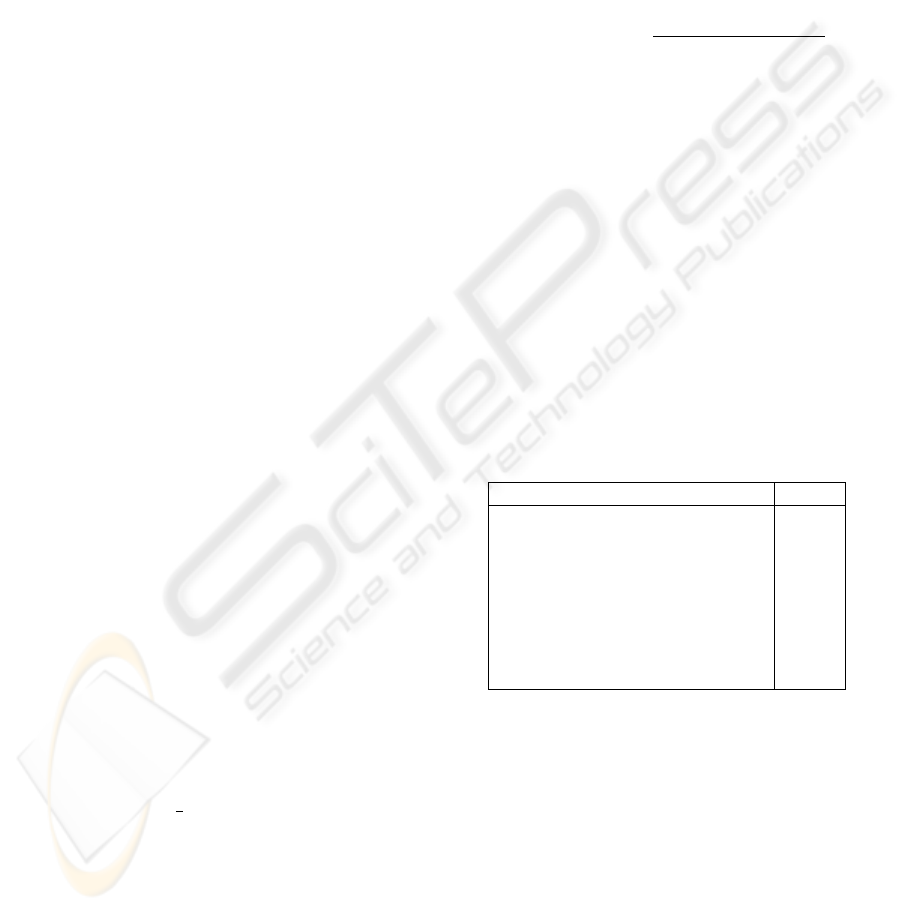
Figure 5: Optical simulation in Zemax. (a) back illumina-
tion with a diffuse light source of 2 mm
2
with wavelengths
of 480-650 nm with transparent particles. (b) zoom on the
particles and (c) examples of 50 µm out of focus ellipsoid
particels (50 µm × 16.7 µm) and spherical in focus particles
(50 µm).
the robustness of the input parameter choices, which
concerns number of radial lines, number of sampling
steps, sampling distance, optimization weights, see
Equation 2, and the initial position and size estimates
of the particles.
Data. The endoscopic probe consists of three dou-
blets with different powers separated as shown in Fig-
ure 5. The distance between the object plane (parti-
cles) and the first optical element, which is a cover
plate, is just 1 mm. The separations between the op-
tical elements up to the CCD is so maintained and
optimized to provide a magnification of 6. The de-
sign is performed in Zemax optical design software.
The total track length from object to image (particles
to CCD) is 25 cm and the optical resolution of the
system is 2 microns. The entire visible wavelength
region is used to optimize this system (480-650 nm).
The depth of focus at the object side is computed to
be +/- 75 microns when defined by a drop of more
than 90% of the modulation transfer function. To in-
corporate the real situation of illumination with back
light of spherical and ellipsoidal particles, modeling is
done in a non-sequential mode in Zemax, which can
handle diffuse light and 3D particles. The diffuse light
source is located a few millimeters behind the parti-
cles and emits light in the specified wavelength range
randomly over a 15 degrees angle. The particles used
are transparent with refractive index of 1.6 at 555 nm
wavelength. Several million rays per simulation were
used to generate a single image with particles. Imag-
ing is done using a CCD array with 4 Megapixels of
7 micron pitch.
The real data set consists of particles in water sus-
pension placed between two glass sheets, which have
been moved with µm precision relative to the focus
plane. 25 µm particles are shown in Figure 6.
Figure 6: Setup for acquiring real data. (a) particles placed
between glass sheets that can be moved relative to the cam-
era. (b) image example with LED back illumination and 25
µm spherical transparent particles.
Size Experiment. In this experiment we investigate
the robustness of our size estimation. We have both
tested the mean value and standard deviation of the
estimated size, and how it depends on the distance
to the focus plane. The results are shown in Figure
7. The first three graphs (a)-(c) shows a relative size
estimate as a function of distance to the focus plane,
and each curve shows an individual size. There is a
general bias towards overestimating the size of parti-
cles that are out of focus and small particles are also
somewhat overestimated. The model is not capable of
handling very large size changes, and gives an erro-
neous prediction for particle scaled to 25% size. This
is due to the fixed parameter setting where the sam-
pling is too coarse to identify the small particles. Size
variation is obtained by scaling the images.
Figure 8 illustrates the robustness to inaccurate
spatial initialization. The model will only fail in find-
ing a good center approximation if it is initialization
far from the particle and especially if it is done diag-
onal.
Shape Experiment. The purpose of this experi-
ment is to investigate how the model deforms to adapt
to non-spherical particles. The results are shown in
Figure 9, where the relation between the horizontal
and vertical line segments are plotted as a function
of particle distance to the focus plane. The particles
does not adapt completely to the expected shape, and
there is a tendency for out of focus particles to be
more circular than in focus particles. Despite the par-
ticle shape is not found exactly from the experiment,
this can be inferred by regression, which we will show
next.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
40
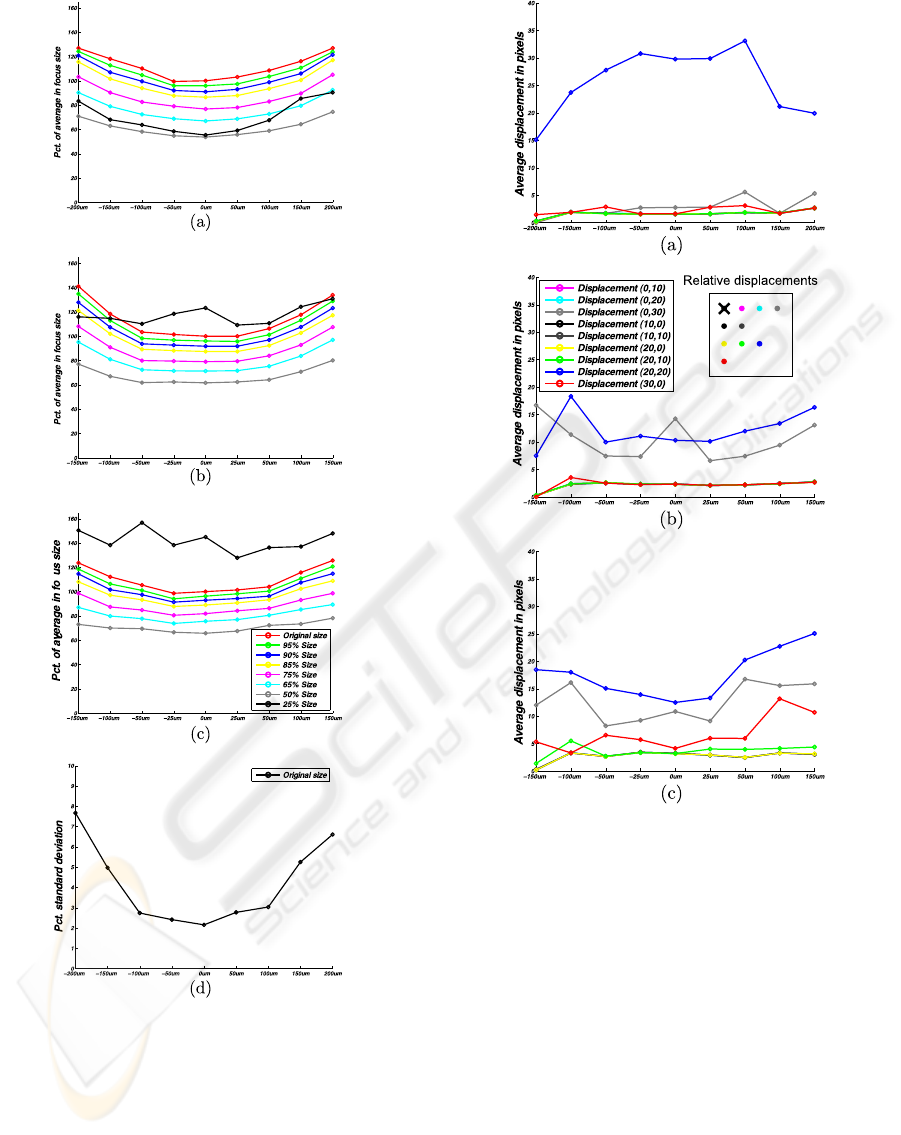
Figure 7: Experiment with change of size. The horizontal
axis of (a)-(c) shows the average radial distance relative to
the in focus particle of original size. Standard deviation of
the size estimate in percent of the original (d). Note the
bias towards overestimation of size and less certainty as a
function of out of focus.
Regression Experiment. Results from our regres-
sion experiment is shown in Table 2. The regression
is performed using ridge regression with λ = 10
−5
.
We divided our data set into approximately half train-
Figure 8: Experiment for testing robustness to wrong spa-
tial initialization of particle. Vertical axis is the average dis-
tance in pixels to the true position and horizontal axis is the
particle distance to the focus plane. A 50 µm particle has
a radius of about 17 pixels. Experiments have been carried
out for simulated particles, which are spherical (a), ellip-
soids (1 × 2) (b), and ellipsoids (1 × 3) (c). Ellipsoids have
the major axis vertical. The displacements are schemati-
cally shown in (b). Each displacement step is 10 pixels.
ing and half test sets, which was 12 particles from
the simulated set for training and 13 particles for test,
from each image. In the real data set, we have 82 de-
picted particles, and the split was 41 in each group.
We had 27 simulated images, giving 675 observations
for the simulation set. In the observed data set we
have 82 particles in 9 images giving 738 observations.
The results are obtained from 100 random splits in test
and training data. We use the mean radial descriptor
(I
o
) and the length for each line segment (r
o
) as input
SHAPE AND SIZE FROM THE MIST - A Deformable Model for Particle Characterization
41
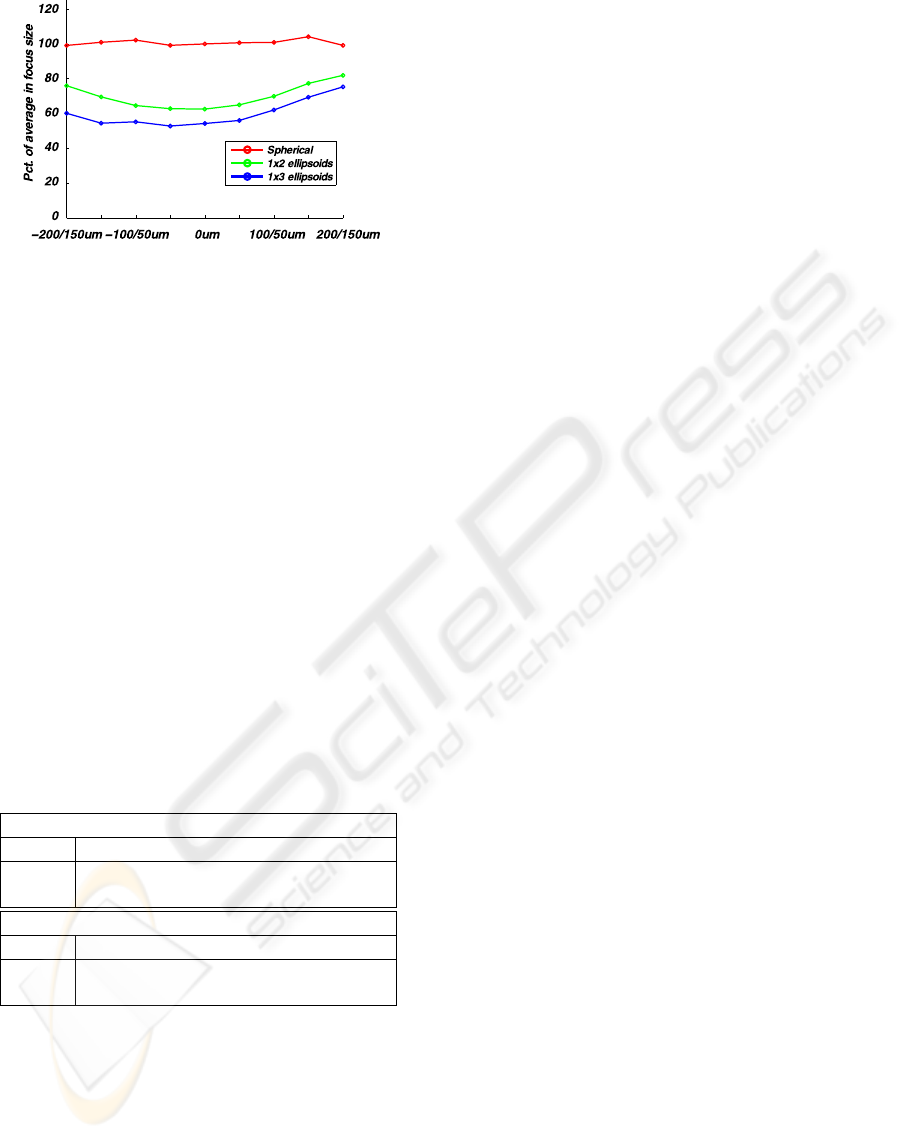
Figure 9: Shape experiment. The horizontal axis is the rela-
tion between the vertical and horizontal line segments from
our particle model, corresponding to the minor and major
axis in the simulated ellipsoids. The true relation for the red
curve would be 1, the green curve would be 0.5 and the blue
curve would be 0.33.
to our regression, see Equation 4.
In the simulated data we perform a regression for
both distance to the focus plane, particle size, and
shape, which is the relation between the major and
minor axis. The obtained results show precise predic-
tions, indicating that this characterization is adequate
for reliable particle modeling. For the real data we
also obtained satisfactory prediction of the distance to
the focus plane, but with about 50% lower precision.
Table 2: Regression model. Regression has been done for
both simulated and real data. There were 25 particles in
the simulated data and 82 particles in the real data set. The
reported numbers are the standard deviation of the absolute
errors of the regression, and the size range of the numbers.
The columns are distance to the focus plane (Distance FP),
average radial line length (Size), relation between the radial
and horizontal line lengths (Shape).
Simulated data
Distance FP Size Shape
Std. 14.20µm 0.8921µm 0.0357
Range 0-200µm 33.3-50µm 0.33-1.0
Real data
Distance FP
Std. 21.69µm
Range 0-180µm
4 DISCUSSION
The data for our experiment is based on LED illumi-
nation, both what is used in the real data, and what
is simulated. This is a rather cheep solution, and if it
can provide satisfactory results, it will be a cost effec-
tive solution. But the rather diffuse illumination from
the LEDs could be replaced by collinear laser, which
will give much higher particle contrast, and therefore
potentially improved performance. Wether this will
give larger depth of field or just improved predictions
is for future investigations to show.
The size experiment illustrates how robust our par-
ticle model is to the initialization. With the same set
of parameters, it is capable of handling up to 50%
scale change. But with an initialization, using for ex-
ample scale space blob detection, this should be ade-
quate to adjusting the parameters to obtain a precise
particle characterization.
Scaling images for size variation does not account
for the change i optical properties of smaller particles.
We know that smaller particles in back-illumination
change appearance caused by scattering effects like
refraction and defraction, and this requires further in-
vestigations to verify that our model will be able to
characterize these particles. The appearance change
will result in blurred particles, which our particle
model handles fine. As a consequence the main fo-
cus should be on weather the regression model can
predict the true size. Our regression experiment indi-
cates that this should be possible.
The shape experiment shows that the model does
not adapt precisely to the shape of the particle. This
is caused by the Gaussian noise removal, which also
blurs the particles making them appear less ellipsoid
than they are in reality. The reason for the quite dra-
matic Gaussian convolution, which actually acts con-
trary to the deconvolution that we are trying to infer, is
the noise level in the simulations. The noise is much
larger, than what is seen in the real data, which can be
seen by comparing the images in Figure 5 (c) and Fig-
ure 6 (b). But even with this high noise level, it was
possible to infer the true shape by ridge regression.
Our regression experiment shows that the size,
shape, and distance to the focus plane can be inferred
using our particle model. This is highly encourag-
ing, because it can help in performing more reliable
particle analysis, than by just using the in focus parti-
cles, see e.g. (Ghaemi et al., 2008). The linear ridge
regression is a simple procedure, and much more ad-
vanced methods exists, which for example can han-
dle non-linearities. This might be relevant for infer-
ring particle information of a larger size range or very
small particles, where scattering effects are more pro-
nounced. In this paper we have chosen to primarily
focus on the particle model, so we leave this for fu-
ture investigations.
The data set for our experiments are somewhat
limited, and we plan to extend the data in future in-
vestigations. This should also include less noisy sim-
ulations, which can be obtained from extended sim-
ulation time. In addition to more data, we will also
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
42

investigate how model parameters can be used for pre-
dicting properties of real data. This will enable simu-
lations of complicated particle modeling for which it
is very hard to obtain ground truth, for example com-
plicated shaped particles or various illumination con-
ditions. From this better analysis setups can be de-
signed, and expected performance can be estimated.
There are no comparative studies between our
model and similar approaches, because other proce-
dures are based on modeling in focus particles, see
e.g. (Fisker et al., 2000; Ghaemi et al., 2008). The ra-
dial sampling lines, which we use in our model, will
give much weight to the center part of the particle.
How this influences the particle predictions and if this
can help for improvements should be investigated.
5 CONCLUSIONS
There are two main contributions of the work pre-
sented in this paper. Our first contribution is that we
experimentally show that out of focus particles can be
modeled reliably, and therefore be included in obtain-
ing information of particle size, shape and distance to
the focus plane. This is enabled through our particle
model, which is our second contribution. The model
is very robust and provides precise predictions of par-
ticle characteristics. We hope that this can help in re-
moving some of the mist from particle characteriza-
tion, and hereby give better performance and system
design to particle analysis in the future.
ACKNOWLEDGEMENTS
This work has been partly financed by the EU-project
PROVAEN under the Sixth Framework
2
. We also
thank our collaborators from Dantec A/S
3
for provid-
ing data and fruitful discussions.
REFERENCES
Cho, S., Matsushita, Y., Lee, S., and Postech, P. (2007).
Removing non-uniform motion blur from images. In
IEEE 11th International Conference on Computer Vi-
sion, 2007. ICCV 2007, pages 1–8.
Dai, S. and Wu, Y. (2008). Motion from blur. In Proc. Conf.
Computer Vision and Pattern Recognition, pages 1–8.
2
http://www.provaen.com/
3
http://www.dantecdynamics.com/
Fisker, R., Carstensen, J. M., Hansen, M. F., Bødker, F., and
Mørup, S. (2000). Estimation of nanoparticle size dis-
tributions by image analysis. Journal of Nanoparticle
Research, 2(3):267–277.
Ghaemi, S., Rahimi, P., and Nobes, D. (2008). Measure-
ment of Droplet Centricity and Velocity in the Spray
Field of an Effervescent Atomizer. Int Symp on Appli-
cations of Laser Techniques to Fluid Mechanics, Lis-
bon, Portugal, 07-10 July, 2008.
Hastie, T., Tibshirani, R., Friedman, J., and Franklin, J.
(2005). The elements of statistical learning: data min-
ing, inference and prediction. The Mathematical In-
telligencer, 27(2):83–85.
Kundur, D. and Hatzinakos, D. (1996). Blind image decon-
volution. IEEE signal processing magazine, 13(3):43–
64.
Levin, A. (2007). Blind motion deblurring using image
statistics. Advances in Neural Information Processing
Systems, 19:841.
Lindeberg, T. (1994). Scale-space theory in computer vi-
sion. Springer.
Lucy, L. B. (1974). An iterative technique for the recti-
fication of observed distributions. The astronomical
journal, 79(6):745–754.
Narayan, R. and Nityananda, R. (1986). Maximum entropy
image restoration in astronomy. Annual review of as-
tronomy and astrophysics, 24(1):127–170.
Richardson, W. H. (1972). Bayesian-based iterative method
of image restoration. Journal of the Optical Society of
America, 62(1):55–59.
Shan, Q., Jia, J., and Agarwala, A. (2008). High-quality
motion deblurring from a single image. ACM Trans-
actions on Graphics-TOG, 27(3):73–73.
Shan, Q., Xiong, W., and Jia, J. (2007). Rotational mo-
tion deblurring of a rigid object from a single image.
In IEEE 11th International Conference on Computer
Vision, 2007. ICCV 2007, pages 1–8. Citeseer.
Starck, J. L., Pantin, E., and Murtagh, F. (2002). Decon-
volution in astronomy: a review. Publications of the
Astronomical Society of the Pacific, 114(800):1051–
1069.
Wiener, N. (1964). Extrapolation, Interpolation, and
Smoothing of Stationary Time Series. The MIT Press.
SHAPE AND SIZE FROM THE MIST - A Deformable Model for Particle Characterization
43
