
BACKGROUND MODELING WITH MOTION CRITERION AND
MULTI-MODAL SUPPORT
Juan Rosell-Ortega
Instituto de Autom´atica e Inform´atica Industrial, Universidad Polit´ecnica de Valencia, Valencia, Spain
Gabriela Andreu-Garc´ıa, Fernando L´opez-Garc´ıa, Vicente Atienza-Vanacloig
Departamento de Inform´atica de Sistemas y Computadores, Universidad Polit´ecnica de Valencia, Valencia, Spain
Keywords:
Background subtraction, Surveillance, Motion segmentation.
Abstract:
In this paper we introduce an algorithm aimed to create a background model with multimodal support, which
associates a confidence value to the obtained model. Our algorithm creates the model based on a criterion of
motion, pixel behavior and pixel similarity with the scenes background. This method uses only three frames
to create a first model without restrictions on the frame content. The model is adapted over time to reflect new
situations and illumination changes in the scene. One approach to detect corrupt model is also mentioned.
The goal of confidence value is to quantify the quality of the model after a number of frames have been used
to build it. Quantitative experimental results are obtained with a well-known benchmark and compared to a
classical background modelling algorithm, showing the benefits of our approach.
1 INTRODUCTION
1
Background subtraction is one of the most popu-
lar methods to detect regions of interest in frames.
This technique consists in classifying as foreground
all those pixels whose difference from a background
model is over a threshold. A popular method for back-
ground modelling consists in modelling each pixel
in a frame with a Gaussian distribution (Wren et al.,
1997). A simple technique is to calculate an aver-
age image of the scene, to subtract each new video
frame from it and to threshold the result. The adap-
tive version of this algorithm updates the model pa-
rameters recursively by using a simple adaptive filter.
The Gaussian distribution approach however,does not
work well when the background is not static, for in-
stance, waves, clouds or any movement which also
belongs to the background cannot be properly de-
scribed using one Gaussian. A solution proposed
(Stauffer and Grimson, 1999) is using more than one
Gaussian to model the background. In (Zang and
Klette, 2004) methods for shadow detection and per-
1
This work has been supported partially by the research
projects DPI2007-511 66596-C02-01 (VISTAC) and Euro-
pean SENSE Project 033279
pixel adaptation of the parameters of the Gaussians
are developed. Following with the methods based on
mixture of Gaussians, in (Elgammal et al., 2000), it
is proposed to build an statistical representation of
the background, by estimating directly from data the
probability density function. Other approaches can
be found in (Mason and Duric, 2001), whose pro-
posed algorithm computes a histogram of edges in a
block basis. This idea together with intensity infor-
mation may be found in (Jabri et al., 2000). Mo-
tion may also be used to model the background as
proposed in (Wixson, 2000), whose algorithm detects
salient motion by integrating frame-to-frame optical
flow over time. Radically different is the approach
based in LBP features introduced in(M. Heikkila and
Pietikainen, 2006). In general, the use of frames with
low or very low activity is one of the constraints con-
sidered in these approaches.
We focus on demanding scenarios, in which there
is always a significant activity level, making it dif-
ficult to obtain a clean model with traditional tech-
niques. Our method aims to obtain a model regardless
of the number of objects moving in the scenario while
building the model. A quality measure is developed
with the aim of measuring the quality of the obtained
model.
419
Rosell-Ortega J., Andreu-García G., López-García F. and Atienza-Vanacloig V. (2010).
BACKGROUND MODELING WITH MOTION CRITERION AND MULTI-MODAL SUPPORT.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 419-422
DOI: 10.5220/0002822604190422
Copyright
c
SciTePress
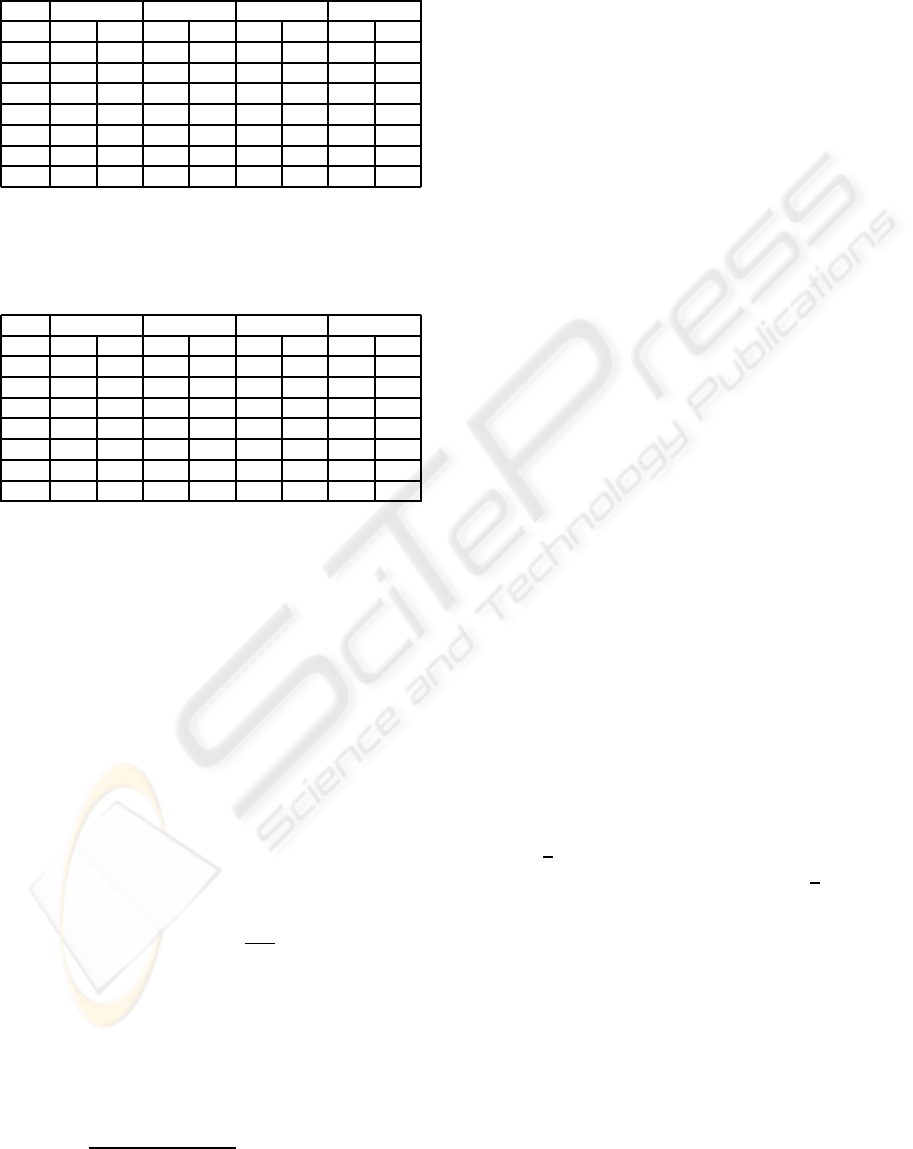
Table 1: Results obtained for the Wallflower benchmark us-
ing equation 5 to detect foreground regions with γ = 0.6.
Dashed results mean that no foreground pixels were labelled
in the control image.
κ = 5 κ = 10 κ = 15 κ = 20
Seq. TP TN TP TN TP TN TP TN
boo. 0.67 0.82 0.55 0.93 0.48 0.96 0.41 0.97
cam. 0.40 0.89 0.15 0.95 0.72 0.91 0.70 0.92
fore. 0.72 0.30 0.53 0.80 0.49 0.90 0.47 0.99
lig. 0.43 0.98 0.33 0.97 0.26 0.98 0.21 0.98
mov. - 1 - 1 - 1 - 1
tim. 0.70 0.95 0.48 0.97 0.37 0.98 0.31 0.98
wav. 0.91 0.56 0.86 0.68 0.80 0.76 0.74 0.80
Table 2: Results obtained for the Wallflower benchmark us-
ing equation 5 to detect foreground regions with γ = 0.4.
Dashed results mean that no foreground pixels were labelled
in the control image.
κ = 5 κ = 10 κ = 15 κ = 20
Seq. TP TN TP TN TP TN TP TN
boo. 0.87 0.43 0.59 0.92 0.55 0.94 0.50 0.95
cam. 0.74 0.74 0.77 0.90 0.72 0.90 0.70 0.93
fore. 0.90 0.60 0.49 0.98 0.24 0.99 0.20 0.99
lig. 0.82 0.15 0.30 0.86 0.48 0.90 0.47 0.91
mov. - 0.97 - 1 - 1 - 1
tim. 0.83 0.77 0.42 0.98 0.35 0.98 0.30 0.98
wav. 0.96 0.32 0.86 0.67 0.81 0.73 0.75 0.79
2 MULTI-MODAL BACKGROUND
ADAPTIVE WITH
CONFIDENCE ALGORITHM
(MBAC)
MBAC considers consecutive gray scale frames
F(0),F(1), ...F(n), in which any pixel p ∈ F(i) be-
longs either to foreground or to background and
builds a background model B starting from a frame
F(i),i ≥ 0, by describing each pixel b with a num-
ber of models B
m
b
(0), with m = 1 at t = 0. Pixels are
classified following the similarity criterion proposed
in (Rosell-Ortega et al., 2008). This criterion uses a
continuous function defined as,
S(p,b) = e
−
|p−b|
κ
(1)
being p the gray level of a pixel and b the gray
level of a background pixel, and κ a constant. Motion
can be computed analogously if we consider motion
as the dissimilarity with values of previous frames.
For q ∈ F(t) a pixel in the current frame, we consider
p ∈ F(t − 1) and r ∈ F(t − 2), two pixels with the
same coordinates as q, the motion of q can be defined
as M(q) =
(1−S(p,q))+(1−S(r,q))
2
.
MBAC starts setting ∀b ∈ B,1 ≤ m ≤ K(b) :
B
1
b
(0) = F
b
(i),c
m
b
(0) = 0.01, being c
m
b
(0) the confi-
dence value of the m-th model of pixel b in time i = 0.
This confidence value measures how good the model
describes the pixel. The parameter K(b) limits the
maximum number of models for pixel b. Initially,
only one model per pixel is considered. The follow-
ing two frames, F(i + 1) and F(i + 2), are ignored
and used only to detect motion in frame F(i+ 3). For
all the following frames F( j), j ≥ i + 3, motion and
similarities with B(i− 1) are seeked. The probability
that any pixel q belongs to background pBack(q) or
foreground, pFore(q) is,
pBack(q) = max(1− M(q),max(S(q,B
m
b
)))) (2)
pFore(q) = max(M(q),1− max(S(q,B
m
b
))) (3)
It is easy to see, that equation for pBack(q) de-
scribes mathematically the intuitive idea that pixels
similar to background or which are reasonably sta-
tionary have a bigger probability of belonging to
background. The segmentation separates pixels in
two different sets; the background set (bSet), defined
as bSet = {p ∈ F(i) : p /∈ fSet}, and the foreground
set (fSet).
fSet = {p ∈ F(i) : pFore(p) > τ} (4)
In the previous expression for fSet, the value of τ
restricts the criteria used to select foreground pixels.
This expression can be rewritten as,
fSet = {p ∈ F(i) : pFore(p) > pBack(p)} (5)
After classifying pixels, a simple criterion to de-
tect corrupt models is used. We assume that the
amount of background pixels (V) is bigger than that
of foreground pixels (P). If R = P+V, a real number
µ < 1 can be found that P = µ × R. The value µ is set
experimentally depending on background clutter. In
the case
P
R
> µ at time i, the process restarts setting
∀b ∈ B,B
1
b
(0) = F
b
(i), c
1
b
= max(c
m
b
). If
P
R
≤ µ, the
model is updated with information of frame F(i) In
order to cope with light changes. The model m which
matched the background for a pixel b is updated as,
B
m
b
(i) = α B
m
b
(i− 1) + (1− α) F
b
(i) (6)
c
m
b
(i) = α c
m
b
(i− 1) + (1− α) pBack(b) (7)
Any other non-matching model l describing pixel
b updates its confidence as,
c
l
b
(i) = α c
l
b
(i− 1), ∀l 6= m (8)
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
420
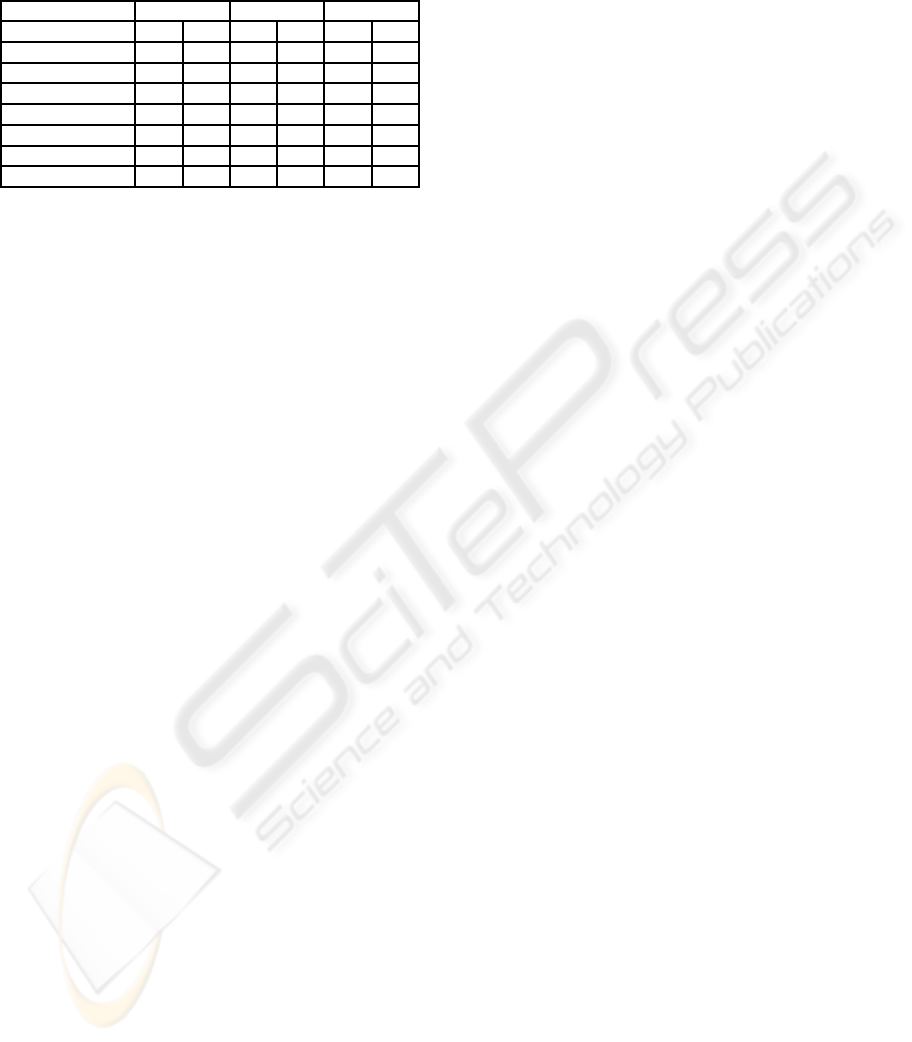
Table 3: The two columns on the left show true posi-
tives and negatives percentages of algorithm MBAC for the
Wallflower benchmark. On the right, results for the Stauffer
algorithm.
MBAC Stauffer BAC
TP TN TP TN TP TN
bootstrap 0.52 0.94 0.44 0.97 0.60 0.91
camouflage 0.73 0.90 0.73 0.92 0.75 0.76
foregroundAperture 0.48 0.92 0.50 0.85 0.48 0.90
lightSwitch 0.24 0.97 0.73 0.07 0.28 0.98
movedObject - 1.00 - 1.00 - 1.00
timeOfDay 0.36 0.97 0.41 0.98 0.36 0.98
wavingTree 0.75 0.75 0.86 0.90 0.78 0.67
where α ∈ [0,1] is a learning rate factor. For every
pixel p ∈ fSet, its m background models are ordered
in descending order according to their confidences.
We use a parameter gamma to control the speed at
which models are changed or updated in the back-
ground model. The closer gamma is to 1, the quicker
models will be added or updated. In the case it is
verified that s = Σc
m
p
(i),1 ≤ m ≤ K(p) < γ , a new
model will be added or the worst model will be re-
placed. For the new model m, the algorithm sets
B
m
p
(i) = F(i),c
m
p
(i) = 0.01.
3 EXPERIMENTS AND RESULTS
We used the Wallflower benchmark (Toyama et al.,
1999) in order to compare our approach to Stauffer’s
algorithm (Stauffer and Grimson, 1999) and BAC
(Rosell-Ortega et al., 2008). We compared the num-
ber of pixels classified as foreground and labelled as
foreground in the control image (true positives) and
those pixels classified as background and also classi-
fied as background in the control image (true nega-
tives).
We used K = 5 and T = 0.8 as parameters for the
Stauffer algorithm. Parameters for MBAC were set
after a previous study of their impact in the execution.
Tables 2 and 1 show the results obtained by varying
the values of κ in equation 1 and its impact depending
on the value of γ used. Results seem to be better with
a low γ. Tables 4 and 5 show the results of using each
definition of pFore in equation 4. As a conclusion
of these experiments, the segmentation seems to im-
prove slightly when a strict value for τ is chosen. The
remaining parameters of MBAC are κ = 20, µ = 0.85,
γ = 0.4 and τ = 0.8.
Table 3 illustrates the results with the Wallflower
benchmark. Qualitative results are shown in figure
1. In sequence lightSwitch, MBAC manages prop-
erly the sudden light change restarting the model,
while Stauffer’s algorithm fails to deal with the sit-
uation. The most significant improvement of MBAC
over BAC, is achieved in sequences wavingTrees and
camouflage. In all cases MBAC achieved over 80%
of success in the classification of background pixels.
4 CONCLUSIONS AND FUTURE
WORKS
We introduced an approach in which similarity and
motion features are used to classify pixels as fore-
ground or background. Considering motion at the
same level as background subtraction with several
models produces accurate background models but at
the expense or reducing the amount of regions of in-
terest detected if thresholds are not accurate enough.
This issue remains as an open line for further re-
search.
REFERENCES
Elgammal, A., Harwood, D., and Davis, L. (2000).
Non-parametric model for background subtraction.
ECCV00, pages 751 767.
Jabri, S., Duric, Z.,Wechsler, H., and Rosenfeld, A. (2000).
Detection and location of people in video images un-
sing adaptive fusion of color and edge information.
IEEE Proc. ICPR00, pages 627 630.
M. Heikkila, M. and Pietikainen, M. (2006). A texture-
based method for modeling the background and
detecting moving 0bjects. IEEE Trans. PAMI,
28(4):657662.
Mason, M. and Duric, Z. (2001). Using histograms to detect
and track objects in color video. Proc. Applied Imag-
inery pattern Recognition Workshop, pages 154159.
Rosell-Ortega, J., Andreu-Garcia, G., Rodas-Jorda, A.,
and Atienza-Vanacloig, V. (2008). Background mod-
elling in demanding situations with confidence mea-
sure. IEEE Proc. ICPR08.
Stauffer, C. and Grimson, W. E. L. (1999). Adaptive back-
ground mixture models for real-time tracking. Proc.
IEEE CVPR99, pages 246 252.
Toyama, K., Krumm, J., Brumitt, B., and Meyers, B.
(1999). Wallflower: Principles and practice of back-
ground maintenance. IEEE ICPR99, Kerkyra, Greece,
pages 255261.
Wixson, L. (2000). Detecting salient motion by accumulat-
ing directionally-consistent flow. IEEE Trans. PAMI,
8(22):774 780.
Wren, C. R., A. Azarbayenjani, T. D., and Pentland, A. P.
(1997). Pfinder: rel-time tracking of the human body.
IEEE Trans. PAMI, 10(7):780 785.
Zang, Q. and Klette, R. (2004). Robust background subtrac-
tion and maintenance. IEEE ICPR04, pages 90 93.
BACKGROUND MODELING WITH MOTION CRITERION AND MULTI-MODAL SUPPORT
421
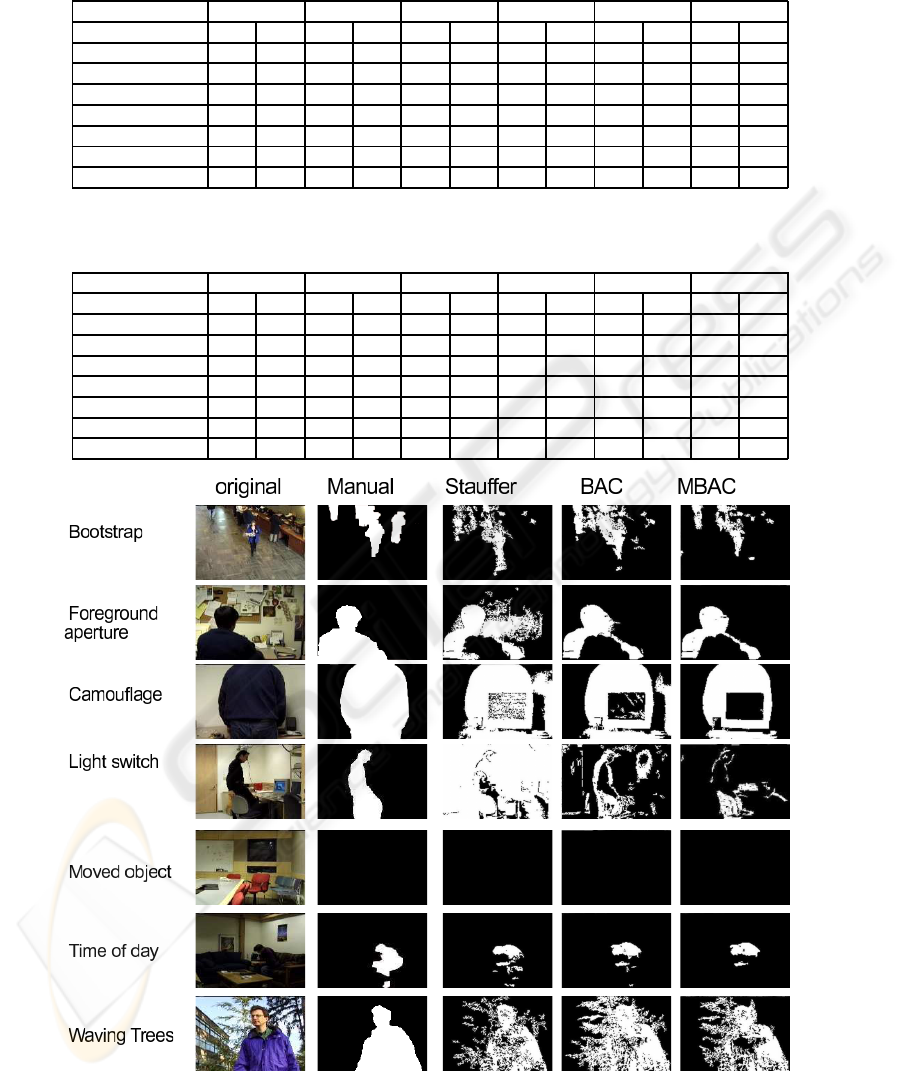
Table 4: Results obtained for the Wallflower benchmark depending on the value assigned to the minimum foreground proba-
bility with γ = 0.6. Dashed results mean that no foreground pixels were labelled in the control image.
τ = 0.4 τ = 0.5 τ = 0.6 τ = 0.7 τ = 0.8 τ = 0.9
Sequence TP TN TP TN TP TN TP TN TP TN TP TN
bootstrap 0.62 0.89 0.59 0.91 0.54 0.92 0.48 0.96 0.39 0.97 0.30 0.99
camouflage 0.13 0.95 0.73 0.86 0.73 0.90 0.70 0.91 0.72 0.93 0.69 0.94
foregroundAperture 0.49 0.88 0.48 0.90 0.48 0.90 0.47 0.92 0.47 0.93 0.46 0.93
lightSwitch 0.44 0.97 0.36 0.97 0.27 0.97 0.20 0.99 0.63 0.17 0.55 0.22
movedObject - 1 - 1 - 1 - 1 - 1 - 1
timeOfDay 0.51 0.95 0.43 0.96 0.32 0.98 0.30 0.98 0.28 0.98 0.26 0.98
wavingTree 0.94 0.50 0.88 0.59 0.79 0.73 0.69 0.79 0.58 0.86 0.46 0.92
Table 5: Results obtained for the Wallflower benchmark depending on the value assigned to the minimum foreground proba-
bility. The value of γ was set to 0.4. Dashed results mean that no foreground pixels were labelled in the control image.
τ = 0.4 τ = 0.5 τ = 0.6 τ = 0.7 τ = 0.8 τ = 0.9
Sequence TP TN TP TN TP TN TP TN TP TN TP TN
bootstrap 0.71 0.79 0.67 0.83 0.61 0.88 0.58 0.91 0.52 0.94 0.44 0.97
camouflage 0.45 0.92 0.34 0.92 0.79 0.78 0.75 0.86 0.73 0.90 0.71 0.91
foregroundAperture 0.69 0.53 0.62 0.71 0.51 0.88 0.48 0.90 0.48 0.92 0.47 0.93
lightSwitch 0.53 0.95 0.44 0.96 0.36 0.98 0.29 0.93 0.24 0.97 0.18 0.99
movedObject - 1 - 1 - 1 - 1 - 1 - 1
timeOfDay 0.74 0.93 0.66 0.94 0.52 0.97 0.44 0.97 0.36 0.97 0.30 0.98
wavingTree 0.98 0.41 0.94 0.47 0.90 0.59 0.83 0.67 0.75 0.75 0.65 0.82
Figure 1: Detection results per sequence. Column on the left corresponds to the control frame segmented by hand, central
column shows the result obtained by BAC and column on the right represents results obtained by MBAC.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
422
