
DESIGNING A MIXED REALITY FRAMEWORK FOR ENRICHING
INTERACTIONS IN ROBOT SIMULATION
Ian Yen-Hung Chen, Bruce A. MacDonald
Department of Electrical and Computer Engineering, University of Auckland, New Zealand
Burkhard C. W
¨
unsche
Department of Computer Science, University of Auckland, New Zealand
Keywords:
Mixed Reality, Robot Simulation
Abstract:
Experimentation of expensive robot systems typically requires complex simulation models and expensive
hardware setups for constructing close-to-real world environments in order to obtain reliable results and draw
insights to the actual operation. However, the test-development cycle is often time-consuming and resource
demanding. A cost-effective solution is to conduct experiments by replacing expensive or dangerous compo-
nents with simulated counterparts. Based on the concept of Mixed Reality (MR), robot simulation systems can
be created to involve real and virtual entities in the simulation loop. However, seamless interaction between
objects from the real and the virtual world remains a challenge. This paper presents a generic framework
for constructing MR environments that facilitate interactions between objects from different dimensions of
reality. In comparison to previous frameworks, we propose a new interaction scheme that describes the neces-
sary stages for creating interactions between real and virtual objects. We demonstrate the strength of our MR
framework and the proposed MR interaction scheme in the context of robot simulation.
1 INTRODUCTION
Throughout the development cycle of a robot system,
experiments are conducted under many different envi-
ronments and validated using a multitude of scenarios
and inputs in order to gather reliable results before
deploying the robot in the actual operation. More-
over, high risk robot operations, such as underwa-
ter, aerial, and space applications, typically require
substantial resources and human support to ensure
safety. The considerable cost and time for creating
well-designed tests and for meeting safety require-
ments often presents a barrier to rapid development
of expensive robot systems.
Motivated by concerns regarding safety, cost, and
time required for real world experimentations of com-
plex systems, Hybrid Simulation and Mixed Reality
(MR) Simulation are proposed to simulate robot op-
erations involving real and virtual components. This
makes it possible to replace expensive or dangerous
simulation components with virtual objects and al-
lows testing of prototypes before the robot system is
fully developed.
The simulator operates based on the Hardware-
In-the-Loop (HIL) simulation paradigm which com-
bines physical hardware experiments with virtual nu-
merical simulations. In particular, MR simulation is
founded on the concept of mixed reality (Milgram
and Colquhoun, 1999) and varies the level of reality
of simulation based on a continuum that spans from
the virtual world to the real world. MR simulation
incorporates real time visualisation techniques which
have been proven to benefit robot developers in un-
derstanding complex robot data during development
(Collett and MacDonald, 2006).
This paper presents the conceptual framework
which our MR robot simulator is built upon. The
framework formalises MR simulation systems in a
generic manner that will be useful to other MR sys-
tem researchers and designers, and will enable clearer
comparisons and more standardised implementations
of MR systems. We propose a novel method for fa-
cilitating interactions in an MR environment. In com-
parison to previous work, the interaction methods en-
ables various entities (real or virtual, robot or the envi-
ronment) to physically participate in simulation, thus
331
Yen-Hung Chen I., A. MacDonald B. and C. Wünsche B. (2010).
DESIGNING A MIXED REALITY FRAMEWORK FOR ENRICHING INTERACTIONS IN ROBOT SIMULATION.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 331-338
DOI: 10.5220/0002817903310338
Copyright
c
SciTePress

allowing complex test scenarios to be created for eval-
uating robot systems.
Section 2 describes related work. Section 3
presents our MR framework. Section 4 illustrates how
we apply our concepts to building MR robot simula-
tion. Section 5 demonstrates our MR robot simulator.
2 RELATED WORK
Applications of Augmented Reality (AR) and MR in
robotics have provided developers a safe environment
for testing robot systems. The work by metaio GmbH
and the Volkswagen Group (Pentenrieder et al., 2007)
demonstrate the application of AR in the industrial
factory planning process and have reduced construc-
tion costs and improved planning reliability. Nishi-
waki et al. (Nishiwaki et al., 2008) propose a mixed
reality environment that aids testing of robot subsys-
tems by visualising robot, sensory information, and
results from planning and vision components over the
real world for a more intuitive visual feedback. How-
ever, the focus of work has been placed on visualisa-
tion of robot information with limited information on
creating MR environments for simulation.
MR environment construction requires combin-
ing real and virtual representations, which have been
studied in the fields of AR and MR (Barakonyi and
Schmalstieg, 2006; O’Hare et al., 2003). These con-
cepts can be generalised to simulation of robot sys-
tems. However, there exist few formal frameworks
for describing interactions between real and virtual
objects. Many AR/MR applications support physi-
cal interaction with virtual information using tangi-
ble interfaces (Kato et al., 2000; Nguyen et al., 2005).
These interaction techniques are limited in the sense
that the designs are mostly constrained by the capa-
bilities of human users, which makes it difficult to ex-
tend current MR interaction techniques to account for
sensor capabilities of robot systems. Interactions be-
tween the robot and the environment are a requisite
in simulation of most robot tasks. In comparison to
previous work, we present a generic framework that
formalises interactions between objects from across
the real and the virtual dimensions, and demonstrate
its application to robot simulation.
3 MIXED REALITY
FRAMEWORK
The core of our MR Framework is designed to be
generic and can be considered as an extension to gen-
eral concepts in the field of computer graphics and
object-oriented design. We extend and apply these
concepts to modelling a world composed of objects
from different reality dimensions.
3.1 MR Entity
In order for virtual objects to interact with real ob-
jects, it is necessary to create representations of real
objects in the virtual world. However, unlike virtual
objects that are digitised and completely modelled in
the computer, we may not always have prior knowl-
edge of all objects in the physical environment. The
completeness and accuracy of the model of the real
world depends on the amount of information avail-
able, either measured a priori or collected during op-
eration of the MR system, and they also affect the
degree to which the interaction can be achieved. To
create a model capable of representing an object that
exists within the real-virtual continuum, we introduce
an abstract MR entity.
In the MR world, an entity can be physical, dig-
ital or anywhere in between the two extremes. We
model the MR entity with an attribute called level of
physical virtualisation which describes the degree to
which an entity’s physical characteristics (primarily
physical features that are measurable, such as shape,
colour, and weight) are virtualised with respect to an
object in the real world. An entity with an intermedi-
ate level of physical virtualisation is possible, as will
be described in Section 3.2.
In addition, an entity may not be, or does not al-
ways fully represent the functional character of the
intended object in the actual operation. For exam-
ple, a photograph or a 3D model of a cow can be
used in represent a real cow but it does not have
the capability to move and act like a living animal.
Consequently it is necessary to model the MR entity
with another attribute called level of functional vir-
tualisation which describes the degree to which an
entity’s functional characteristics (quantitative perfor-
mance measures) are simulated with respect to the in-
tended object.
The degree of virtualisation of the entity is deter-
mined by the combined result of physical virtualisa-
tion and functional virtualisation.
3.2 Entity Model
It is common to consider an object in the real world
as a high level representation of a combination of sev-
eral smaller objects. For example, a simple table is
composed of a flat surface and four supporting legs.
Modelling of composite objects has been thoroughly
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
332
addressed in the area of computer graphics, such as
with the use of scene graphs to store a collection of
nodes. In the MR world, we also treat a high level
MR entity as a composition of multiple individual en-
tities and other composite entities. We refer to the
group entities that form a high level MR entity as an
entity model. However, in comparison to traditional
scene graphs, each node in the tree can be chosen to
be real or virtual. The resulting entity model can be
composed of a mixture of real and virtual entities and
possesses an intermediate level of virtualisation. An
entity with an intermediate level of virtualisation is
referred to as an augmented entity.
3.3 Mixed Reality Interaction
While interactions between real objects occur natu-
rally in the real physical world, interactions between
real and synthetic (augmented and virtual) objects are
more complex and require interventions from the sys-
tem to model and realise the process. To facilitate in-
teraction between real and synthetic entities, we need
to model the process of transforming actions into ef-
fects (Rogers et al., 2002). It is necessary to know
how a participating entity reacts to given stimuli, be-
haves under certain constraints, and also how its re-
sponse can be generated. We treat this as a behaviour-
based interaction problem.
When two agents interact, they exhibit different
behaviours. Their behaviours describe the way they
act and respond during the interaction. A typical
expression of behaviour is shown in Fig. 1 (Arkin,
1998).
Figure 1: An expression of behaviour.
In an MR environment, an agent participating in
the interaction can be any single real, augmented, or
virtual entity, or an entity model consisting of group
of entities, e.g. it can be a robot, a single sensor de-
vice, or an environmental object.
Simply put, if we know the interaction is possible
between two objects in the real world, we can also try
to reproduce the results for interactions with synthetic
entities. To achieve this, it is required to model and
generate the expected behaviours of the participating
agents as if the interaction had happened. We first
derive different stages of an interaction based on the
expression in Fig. 1 then analyse the requirements for
a successful interaction between two agents.
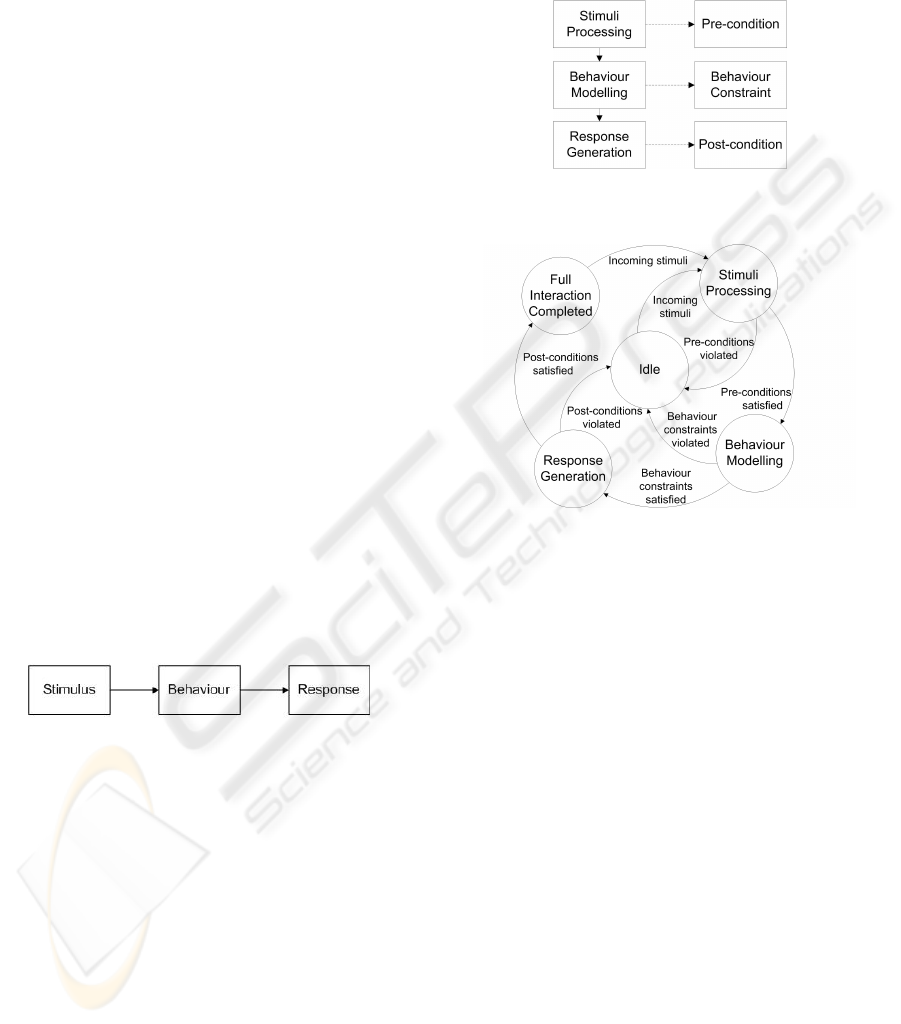
The behaviour expression suggests three stages
that must be executed for an interaction to occur. 1)
Stimuli Processing, 2) Behaviour Modelling, and 3)
Response Generation. The three interaction stages
map to three sets of constraints that must be satisfied
for each stage to be completed, see Fig. 2.
Figure 2: Three stages of behaviour-based interaction
mapped to three sets of constraints.
Figure 3: A condensed statechart of MR interaction.
Stimuli Processing – As two agents engage in
interaction, input stimuli are processed with pre-
conditions checking whether all necessary inputs to
the modelling process are valid and sufficient infor-
mation is available to initiate the interaction. Stimuli
must be measurable and digitised for the modelling
stage. Inputs can be visual, tactile, and audio in order
to support most interaction means between humans,
computer devices, and the environment.
Behaviour Modelling – Once the input data has been
processed and interaction has been confirmed to pro-
ceed, the behaviours of the agents are modelled with
the given inputs. Behaviour constraints are rules that
govern the modelling process. They are typically
mathematical equations or laws of physics which the
agents’ behaviours are bounded by.
Response Generation – The response generation
stage is concerned with realising the modelled be-
haviour. To achieve a full interaction, the response
needs to be executed by propagating the results from
the behaviour modelling stage to both the real and the
virtual world.
During response execution, the level of physical
virtualisation of an entity indicates the class of reality
it belongs to (completely real, augmented, or com-
DESIGNING A MIXED REALITY FRAMEWORK FOR ENRICHING INTERACTIONS IN ROBOT SIMULATION
333
pletely virtual) and thus determines whether an ac-
tion to be performed on an entity model, e.g. trans-
lation or rotation, can be executed in the same man-
ner for all successor nodes in the tree. The level of
functional virtualisation indicates the entity’s capabil-
ity of generating accurate responses by executing the
actions expected of it from the behaviour modelling
stage, regardless of its class of reality. It is impor-
tant to note that a full interaction may not always be
achieved. Instead, a partial interaction may occur if
the response can not be executed due to resource lim-
itations or safety concerns. For example, it is not al-
ways safe to alter the path of a car during its travel
after a simulated collision. In this case, the response
can be generated by reporting the resulting behaviours
to the user using alternative methods, such as textual
or graphical output. Post-conditions are used to verify
the completeness of the interaction. A full interaction
is achieved only if mechanisms are available for exe-
cuting the response, and the outputs from the executed
behaviour match those from the behaviour modelling
stage.
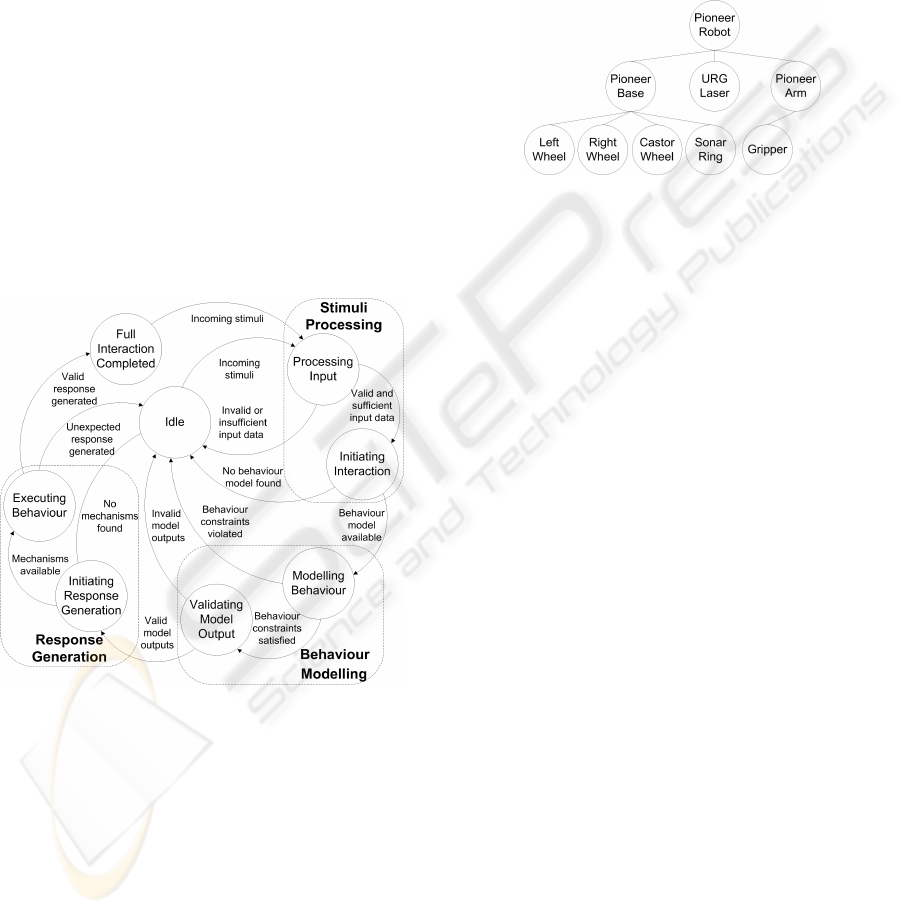
Figure 4: An expanded statechart of MR interaction.
Fig. 3 illustrates the state transitions within an MR
interaction. The interaction statechart can be decom-
posed to the one shown in Fig. 4.
4 ROBOT SIMULATION
This section illustrates how we apply our framework
to building an MR robot simulator.
4.1 Simulation Environment
MR entities allow users to create test scenarios involv-
ing real and simulated components. Objects that we
wish to simulate can be built with different levels of
virtualisation. Robots, environmental objects (includ-
ing humans), as well as objects that do not possess a
physical form can be extended from the MR entity, as
shown in Fig. 6.
Figure 5: An example entity model of a Pioneer robot.
An entity model gives the flexibility of choosing
what parts of a robot or an environmental object to be
virtualised. Consider a Pioneer robot as an example
of an entity model (see Fig. 5). Each node in the tree
can be real or virtual. For instance, when a Pioneer
arm is unavailable, a virtual counterpart can be used
instead. However, we also place constraints between
the parent and the child nodes depending on the ap-
plication and the resources available. Sometimes it
may not seem sensible to use a real gripper in simu-
lation when a virtual Pioneer arm is chosen, whilst at
other times, the use of a real gripper on a virtual arm
is possible by employing surrogate devices for mov-
ing the gripper according to the calculated motions of
the virtual robot arm.
4.2 Interaction Types
We demonstrate our MR interaction concept with two
types of interactions, 1) Sensor-based interaction, and
2) Contact interaction. Note that these interactions are
not limited to robotics. Sensors are increasingly used
in technologies around us, such as in mobile phones
which are becoming a popular platform to deploy MR
systems, while contacts/collisions between real and
virtual objects are important in tangible interaction
studies. The concepts can be extended to common
MR applications, such as the entertainment industry.
4.2.1 Sensor-based Interaction
Sensor-based interaction is concerned with interac-
tions between a sensor device and other entities in
the environment. Sensor devices are essential compo-
nents of a robot system for robots to interact with and
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
334

Figure 6: An inheritance diagram of an entity in an MR robot simulation.
gain understanding of the environment. In particular,
we are interested in robot interactions through extero-
ceptive sensors, both active and passive. This includes
range, vision, thermal, sound, and tactile sensors.
Consider an interaction between a real range sen-
sor device and a virtual wall. Pre-conditions check the
validity of the input stimuli data before modelling the
range sensor behaviour. The necessary data for this
interaction include configurations of the range sensor
device, positive sensor values, and known position,
orientation, and dimension of the virtual wall in the
environment. The behaviour constraint for a range
sensor device requires that the range values are to
be modified according to certain mathematical model
in order to reflect a new object in the range output,
e.g. a boolean operation to subtract the expected ob-
structed volume from the original range readings. The
resulting range values must also be checked if they
are valid, e.g. no negative range values. Once the ex-
pected behaviour has been computed, it is necessary
to propagate the results to the real world, i.e. making
alterations to the real range output. We also assume
that during a sensor-based interaction, physical ef-
fects of the sensor on the environment are neglectable
and thus, behaviour responses from the other party
in interaction do not need to be generated. Once
the response is executed, post-conditions verify the
new range readings against the expected output val-
ues computed during the behaviour modelling stage
to ensure a full interaction.
4.2.2 Contact Interaction
Contact interaction is concerned with physical inter-
actions between entities, regardless of whether the
entities are robotic devices or environmental objects.
Contact interaction is common in robotics, e.g. colli-
sions between moving objects, and is often necessary,
e.g. in manipulation tasks.
Consider the example of a real robot colliding
with a large virtual ball. Before initiating the inter-
action, pre-conditions check whether the dynamics
properties of the virtual robot and the real ball are
known, e.g. mass, and acceleration. An example be-
haviour constraint would require a physics engine to
be available for calculating the resulting motion char-
acteristics of the two entities in interaction. Lastly,
to execute the response, checks are needed to iden-
tify whether mechanisms are available for safely in-
terrupting the motion of the real robot or deflecting
its direction of travel to result in a new motion that
resembles the outcome of the behaviour model. Post-
conditions are optional to ensure the virtual ball is
moved in a similar manner to the output of the physics
model for a full interaction.
5 SYSTEM IMPLEMENTATION
A Mixed Reality Simulation toolkit, MRSim (Chen
et al., 2009b), has been developed based on the con-
cepts introduced in our MR framework. We integrate
MRSim with robot simulation frameworks to provide
MR simulation of a variety of robot platforms and en-
vironments. The initial MR robot simulator is created
by integrating MRSim with the Player/Gazebo robot
simulation framework (Player/Stage, 2008). Since the
design of our MR framework is general and indepen-
dent from the underlying simulation framework, MR-
Sim is sufficiently flexible that we have also ported
MRSim onto another robot simulation framework,
namely the OpenRTM robot simulation environment
(Chen et al., 2009a).
To create a world where real and virtual objects
co-exist and interact in real time, we implement an
MR server that keeps track of the states of the real
and the virtual world and seamlessly fuses informa-
tion from the two worlds to create a single coherent
MR world. The real world is essentially the physi-
cal environment where experimentation takes place.
We use a graphics rendering engine, OGRE (OGRE,
2009), and a physics engine, ODE (Smith, 2008), to
create the virtual world.
To construct the MR simulation environment, we
first create a virtual model of the physical environ-
ment setup. MR entities representing real world ob-
jects that we wish to include in simulation are created
DESIGNING A MIXED REALITY FRAMEWORK FOR ENRICHING INTERACTIONS IN ROBOT SIMULATION
335

(a)
(b)
Figure 7: MR simulation of a hazardous environment. a)
The virtual robot (red) is an avatar of the real robot in the
real world. The robot is equipped with an onboard vision
sensor which provides video imagery of its surroundings for
the remote operator. Virtual MR entities are created and in-
troduced into the environment along with other virtual rep-
resentations of real world objects. b) A close up on the AR
view of the MR world from the robot’s perspective.
using available data measured a priori. In the ideal
situation, a complete model is built and the virtual
world constructed is a replica of the physical envi-
ronment. To introduce additional virtual objects into
the simulation environment, we let users create vir-
tual MR entities and specify their geometric locations
corresponding to the real world, as well as constraints
and their relationships with real world objects (e.g.
parent-child) using a XML configuration file.
An essential component of the MR server is a
markerless AR system (Chen et al., 2008) which
tracks planar features in the environment to provide
pose information for merging the virtual world in ge-
ometric registration with the physical environment.
Fig. 7 shows an example MR simulation environment
constructed using a mixture of real and virtual MR
entities. The screenshots illustrate a scenario where
a real robot is teleoperated to carry out tasks within
a simulated hazardous environment. Disparate sets
of information, e.g. robot and environment data, are
visualised within a single integrated display based
on the ecological interface paradigm (Nielsen et al.,
2007).
During MR robot simulation, the robot will carry
out tasks while interacting with objects from all re-
ality dimensions. The MR server is responsible for
this phenomenon. A simplified UML class diagram
capturing the core components of our MR server and
the implementation of the proposed behaviour-based
interaction scheme is shown in Fig. 8. The world
monitors the states of all entities and detects all pos-
sible interactions at each iteration. Associated with
each entity is an interaction callback function which
carries out the three stages of interaction described
by the attached behaviour. During the interaction
process, modelling of different entity behaviours and
execution of their responses may require software-
and/or hardware-specific implementations. The de-
sign supports custom behaviours to be extended and
integrated into the framework. In our implementation,
we create custom behaviours that utilise the underly-
ing robot development tool for controlling robot de-
vices to achieve MR interaction.
Figure 8: A simplified UML class diagram showing the core
components of the MR server.
6 RESULTS
The AR interface shown in Fig. 7(b) is treated as a
sensor-based interaction between a real camera sen-
sor and virtual objects in the simulation environment.
The interface is created using a behaviour attached
to a camera sensor entity that registers virtual objects
onto the input image. The resulting image generated
correctly reflects the locations of the virtual objects
which are introduced into the scene.
Fig. 10 shows an example of sensor-based inter-
action between a laser sensor and physical objects in
the environment. The same algorithm was run on a
real and a virtual robot, with a real and a virtual laser
sensor respectively, to control the robot to avoid ob-
stacles based on the laser range readings. The robot
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
336
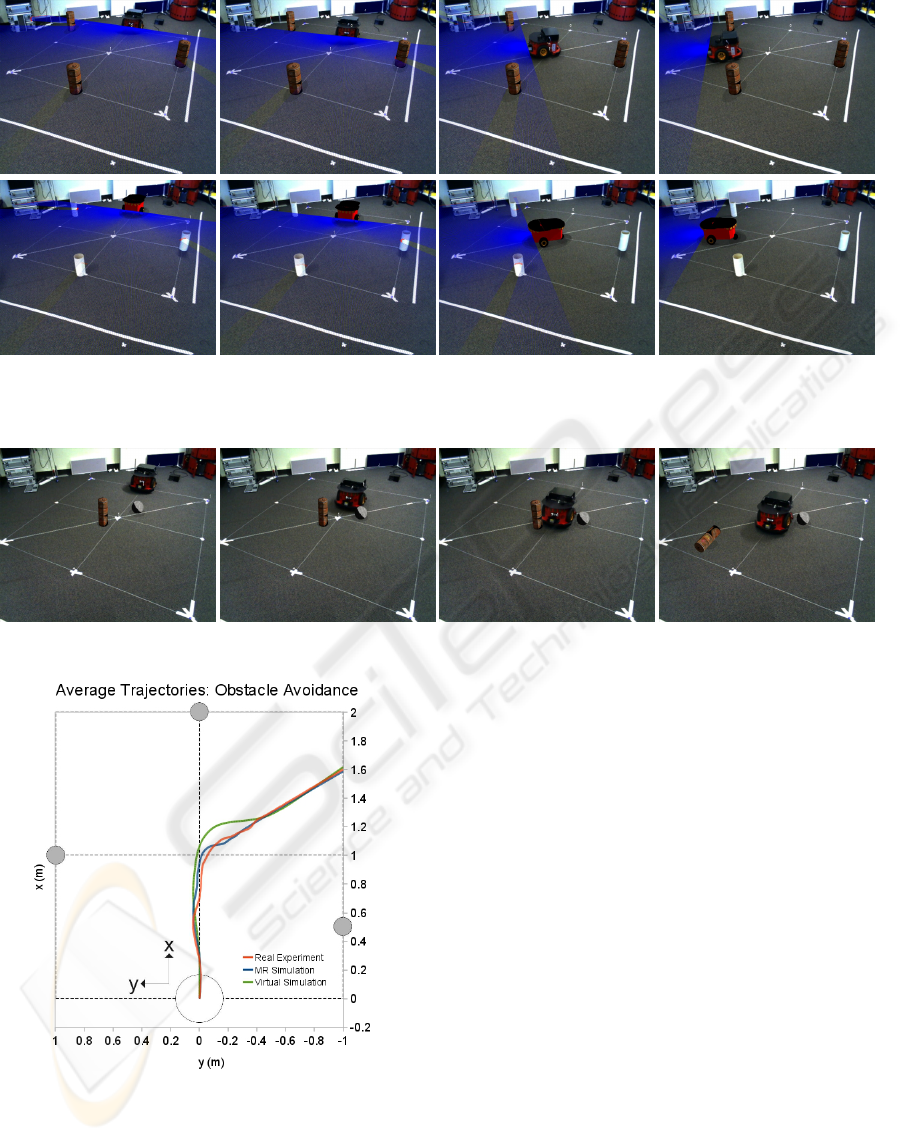
Figure 10: A sequence of screenshots illustrating a sensor-based interaction between a laser sensor device and three cylindrical
objects in the simulation environment. Top Row: A real robot detects and avoids virtual obstacles. Bottom Row: A virtual
robot detects and avoids real obstacles.
Figure 11: A sequence of screenshots illustrating a contact interaction between a real robot and two virtual objects.
Figure 9: Average trajectories travelled by the robot while
avoiding three cylindrical obstacles (gray circles).
successfully detected the presence of the obstacles in
both cases and navigated towards the open space.
We also show an example of a contact interaction
in Fig. 11. A real robot was operated to move until
it collides with virtual objects in its path. The ODE
physics engine was used to model the physics be-
haviour of the two parties in interaction, replacing the
real robot with a virtual representation in physics sim-
ulation. The response of the virtual objects were suc-
cessfully generated and visualised, however, mecha-
nisms were not available in this example to alter the
motion of the real robot according to the physics sim-
ulation, thus only a partial interaction was achieved.
6.1 Comparative Evaluation
An experiment is conducted to quantitatively compare
the behaviour of the robot from running an obstacle
avoidance algorithm in a completely real experiment,
MR simulation, and virtual simulation. The experi-
ment setup uses the same layout as the sensor-based
interaction example in Fig. 10. In MR simulation, the
real robot equipped with a real laser will avoid three
virtual cylindrical objects. Each experiment is run 5
times and the average trajectories taken by the robot
are plotted in Fig. 9
The results show the average trajecotry travelled
by the robot in MR simulation closely resembles the
one in the real experiment, with mean trajectory er-
ror 0.02m and standard deviation 0.01m. Comparing
DESIGNING A MIXED REALITY FRAMEWORK FOR ENRICHING INTERACTIONS IN ROBOT SIMULATION
337

with virtual simulation, MR simulation was found to
yield results closer to the real experiment.
7 CONCLUSIONS
A generic MR framework has been presented in this
paper for creating MR applications. The contribution
of our work is a novel behaviour-based interaction
scheme that enables real and virtual entities to phys-
ically participate in interactions. We have demon-
strated the use of our MR framework in building
robot simulations, giving the developers the flexibility
of virtualising robot and environmental components
for cost and safety reasons. Sensor-based interaction
and contact interactions between entities of varying
level of virtualisation have been successfully achieved
based on the stimulus-behaviour-response interaction
approach. In comparison to previous work where the
application of AR or MR to robot development has
mostly been limited to visualisation, our framework
enables virtual robots, sensors devices, and environ-
mental objects to physically take part in simulation.
The diverse field of MR requires any MR frame-
works to be general and extendable to suit differ-
ent operating contexts. Future work will investigate
the scalability of our framework for achieving other
forms of interactions, e.g. social interactions such as
speech and gesture, that help to create a broad range
of MR applications.
REFERENCES
Arkin, R. (1998). Behavior-based robotics. MIT press.
Barakonyi, I. and Schmalstieg, D. (2006). Ubiquitous ani-
mated agents for augmented reality. In IEEE/ACM In-
ternational Symposium on Mixed and Augmented Re-
ality, 2006. ISMAR 2006., pages 145–154.
Chen, I., MacDonald, B., W
¨
unsche, B., Biggs, G., and
Kotoku, T. (2009a). A simulation environment for
OpenRTM-aist. In Proceedings of the IEEE Interna-
tional Symposium on System Integration.
Chen, I. Y.-H., MacDonald, B., and W
¨
unsche, B. (2008).
Markerless augmented reality for robots in unpre-
pared environments. In Australasian Conference on
Robotics and Automation. ACRA08.
Chen, I. Y.-H., MacDonald, B., and W
¨
unsche, B. (2009b).
Mixed reality simulation for mobile robots. In Pro-
ceedings of the IEEE International Conference on
Robotics and Automation, 2009. ICRA’09., pages
232–237, Kobe, Japan.
Collett, T. and MacDonald, B. (2006). Augmented reality
visualisation for player. In Proceedings of the 2006
IEEE International Conference on Robotics and Au-
tomation, 2006. ICRA 2006., pages 3954–3959.
Kato, H., Billinghurst, M., Poupyrev, I., Imamoto, K., and
Tachibana, K. (2000). Virtual object manipulation on
a table-top ar environment. In Proceedings. IEEE and
ACM International Symposium on Augmented Reality,
2000. (ISAR 2000), pages 111–119.
Milgram, P. and Colquhoun, H. (1999). A taxonomy of real
and virtual world display integration. Mixed Reality-
Merging Real and Virtual Worlds.
Nguyen, T. H. D., Qui, T. C. T., Xu, K., Cheok, A. D.,
Teo, S. L., Zhou, Z., Mallawaarachchi, A., Lee,
S. P., Liu, W., Teo, H. S., Thang, L. N., Li, Y., and
Kato, H. (2005). Real-time 3d human capture sys-
tem for mixed-reality art and entertainment. IEEE
Transactions on Visualization and Computer Graph-
ics, 11(6):706–721.
Nielsen, C., Goodrich, M., and Ricks, R. (2007). Ecological
interfaces for improving mobile robot teleoperation.
IEEE Transactions on Robotics, 23(5):927–941.
Nishiwaki, K., Kobayashi, K., Uchiyama, S., Yamamoto,
H., and Kagami, S. (2008). Mixed reality environment
for autonomous robot development. In 2008 IEEE In-
ternational Conference on Robotics and Automation,
Pasadena, CA, USA.
OGRE (2009). OGRE 3D : Object-oriented graphics ren-
dering engine. http://www.ogre3d.org.
O’Hare, G., Duffy, B., Bradley, J., and Martin, A. (2003).
Agent chameleons: Moving minds from robots to dig-
ital information spaces. pages 18–21.
Pentenrieder, K., Bade, C., Doil, F., and Meier, P. (2007).
Augmented reality-based factory planning - an appli-
cation tailored to industrial needs. In 6th IEEE and
ACM International Symposium on Mixed and Aug-
mented Reality, 2007. ISMAR 2007., pages 31–42.
Player/Stage (2008). The player/stage project.
http://playerstage.sf.net/.
Rogers, Y., Scaife, M., Gabrielli, S., Smith, H., and Harris,
E. (2002). A Conceptual Framework for Mixed Real-
ity Environments: Designing Novel Learning Activi-
ties for Young Children. Presence: Teleoperators &
Virtual Environments, 11(6):677–686.
Smith, R. (2008). Open dynamics engine.
http://www.ode.org/.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
338
