
AN ENCHANCED KINEMATIC MODEL OF THE HUMAN THUMB
FOR AN ARTIFICIAL HAND
Marc Franke and Martin Bogdan
Department of Computer Engineering, Institute for Computer Science
University of Leipzig, Johannisgasse 26, Leipzig, Germany
Keywords: Thumb, Motion, Scaphoid-Trapezium-Trapezoid, Joint, Workspace, Prosthetic hand.
Abstract:
Hand prostheses need to be lightweight, robust and forceful and should replace the function and range of
performance of the human hand in the best possible way. Furthermore, their look and appearance should turn
up as naturally as possible. The prostheses and anthropomorphic robot hands known today often lack one or
more of those aspects. We assume that the kinematic function of the thumb is additionally supported by the
kinematic function of the STT (Scaphoid-Trapezium-Trapezoid) joint, which builds the radial carpal column.
Our study is based on a previous work by Essers (Essers, 2006) determining the specific movements of the
STT joints. In this study, these results were combined with a kinematic 3D model of the human hand with
focus on the kinematic of the radial carpal column. We set up a kinematic chain of the radial carpal column
and the thumb bones to analyse the data gained from the measured movements. The simulations revealed,
that the joint movement of the STT joint supports up to 1/3 of the motion range of the adduction, abduction,
flexion and extension. Based on these results, we integrated the previous findings into a real kinematic model
of the human thumb.
1 INTRODUCTION
The opposability and circumduction of the thumb is
in medical-anatomical literature usually contributed
to the biomechanical function of the CMC (Car-
pometacarpal) joint between the trapezium and the
1st metacarpal. The CMC joint of the thumb en-
joys great freedom of movement due to its saddle-
shaped articular surfaces. It’s movements are flex-
ion and extension, abduction and adduction, prona-
tion and supination. Hence, previous robot hands
are commonly based on CMC joints providing a sim-
plified kinematic with up to 2 DOF (flexion and
extension, abduction and adduction). Anatomically
more precise the CMC joint is synonymously named
trapeziometacarpal joint because of the os trapezium
which connects the 1st metacarpal with the carpus.
In this approach, an enhanced kinematic model of
the human thumb is presented, based on our analy-
sis of a detailed morphologic-kinematic model of the
carpus and the thumb. We state that the kinematic
function of the thumb is supported by the kinematic
function of the STT (Scaphoid-Trapezium-Trapezoid)
joint, which builds the radial carpal column. Our
study is based on a previous work by Essers (Essers,
2006) determining the specific movements of the STT
(Scaphoid-Trapezium-Trapezoid) joint in a set of ca-
daver hands. In our study, we combined these re-
sults with a kinematic 3D model of the human hand,
with focus on the kinematic chain of the radial carpal
column. We set up a kinematic model of the radial
carpal column and the thumb bones to analyse the
data gained from measured motions. Based on these
results, we set up a real kinematic model of the human
thumb and integrated the previous findings. Our ob-
jective is the development of more sophisticated pros-
thetic hands to reconstruct the function of the natural
hand in the best possible way.
2 ANALYSIS OF THE
ARTICULATION OF THE
THUMB AND THE RADIAL
CARPAL COLUMN
The hand’s function and grasping capabilities are
fundamentally supported by the complex articula-
tion of the thumb. The posture of the thumb
has a main contribution to the elementary grasp
206
Franke M. and Bogdan M. (2010).
AN ENHANCED KINEMATIC MODEL OF THE HUMAN THUMB FOR AN ARTIFICIAL HAND.
In Proceedings of the Third International Conference on Biomedical Electronics and Devices, pages 206-210
DOI: 10.5220/0002749202060210
Copyright
c
SciTePress

types of the hand (McKenzie, 1994). In medical-
anatomical literature the carpometacarpal articulation
of the thumb is commonly explained by the func-
tion of the trapeziometacarpal joint between the first
metacarpal (os metacarpale pollicis) and the trapez-
ium. The trapeziometacarpal joint is synonymously
and more commonly named carpometacarpal (CMC)
joint. The CMC joint of the thumb enjoys great free-
dom of movement due to its saddle-shaped articular
surfaces, as described in (Dornblueth et al., 1998),
(Rauber and Kopsch, 2003), (Frisch, 2001), (Speck-
mann and Wittkowski, 1998), (Cooney et al., 1981).
It’s movements are flexion and extension, abduction
and adduction, circumduction and opposition. Hence,
artificial hands with more complex kinematics are
commonly based on CMC joints with 2 degrees of
freedom (DOF) (Butterfass et al., 2001), (Liu et al.,
2007), (Lovchik and M.A.Diftler, 1999), (Wilkinson
et al., 2003), (Wilkinson et al., 2003), (Schulz et al.,
2005) which rotate around fixed joint axes.
(Essers, 2006) describes detailed experimental
results of examining the STT (Scaphoid-Trapezoid-
Trapezium) joint of the human hand using a set of ca-
daveric hands. In this experiment the motion of the
scaphoid and trapezium during abduction, adduction,
extension and flexion of the CMC joint has been mea-
sured and recorded by the use of a 3D tracking sys-
tem. Fig. 2 shows a model of the radial carpal column
and the skeleton of the thumb.
We configured a kinematic model of the carpal
bones to simulate the joint movements. The kinematic
transformation of the thumb including STT joint is:
R
T
T
1
=
R
R
T
1
R
x
T
1
0 1
(1)
=
R
A
S
AA
S
AA
A
S
FE
S
FE
A
S
SP
(2)
S
SP
A
T
AA
S
AA
A
T
FE
S
FE
A
T
SP
(3)
T
SP
A
M
AA
M
AA
A
M
FE
M
FE
A
M
SP
(4)
M
SP
A
P
FE
(5)
P
FE
A
I
FE
(6)
I
FE
A
T
1
. (7)
where (2) describes the scaphoid’s abduction-
adduction, flexion-extension, and supination-
pronation kinematic axes.
(3) describes the trapezium’s abduction-adduction,
flexion-extension, and supination-pronation kine-
matic axes.
(4) describes the metacarpal’s abduction-adduction,
flexion-extension and supination-pronation.
(5) describes the flexion-extension of proximal
phalanx.
(6) describes the flexion-extension of distal phalanx.
(7) describes the constant translation from distal
phalanx to TCP 1 (Tip Center Point).
3 SIMULATION AND ANALYSES
OF THE WORKSPACE WITH
FORWARD KINEMATICS
3.1 Experimental Short-description and
Simulation Basics
The experimental setup from Essers (Essers, 2006) is
displayed in Fig. 1. The thumb’s TCP has manually
been moved in a circumduction with a defined diam-
eter of 100 mm by using the maniplation bar and the
guidance ring. During this circumduction, the coordi-
nates of the scaphoid and trapezium in the radial col-
umn have been measured and recorded by a 3D space
track system.
In the kinematic chain, the movements of the
scaphoid and trapezium measured by Essers describe
a contribution to the movement of the TCP. The MCP
and IP joints are in this case assumed as to be fixed
and the motion of the CMC has not been recorded.
The data in (Essers, 2006) has been taken on a set
of 7 cadaveric hands, average and deviation were cal-
culated and documented. Using the kinematic model
we simulated the circumduction by forward kinemat-
ics, using the recorded coordinates (x,y,z,rx, ry,rz)
for scaphoid and trapezium. The circumduction di-
ameter and the distance between TCP and CMC have
been taken from the experimental setup documenta-
tion. The simulation of the kinematic chain revealed
the motion of the CMC joint. Hence, the contribution
of STT motion and CMC to the circumduction move-
ment of the TCP in workspace could be calculated.
3.2 Setup of the Kinematic 3D Model
The kinematic model has been configured by combin-
ing 3D data of an average sized adult hand skeleton
with the forward kinematics given in (1). The ma-
nipulation guidance ring Fig. 2 (a) has been posi-
tioned aequivalent to the experimental setup in (Es-
sers, 2006). It’s diameter is required to determine the
corresponding TCP circumduction diameter. By ro-
tating the complete thumb around the radius given by
the guidance ring, the TCP circumduction workspace
is generated. The data for scaphoid and trapezium
movements documented in (Essers, 2006) has been
integrated into the 3D model to generate the partial
AN ENCHANCED KINEMATIC MODEL OF THE HUMAN THUMB FOR AN ARTIFICIAL HAND
207
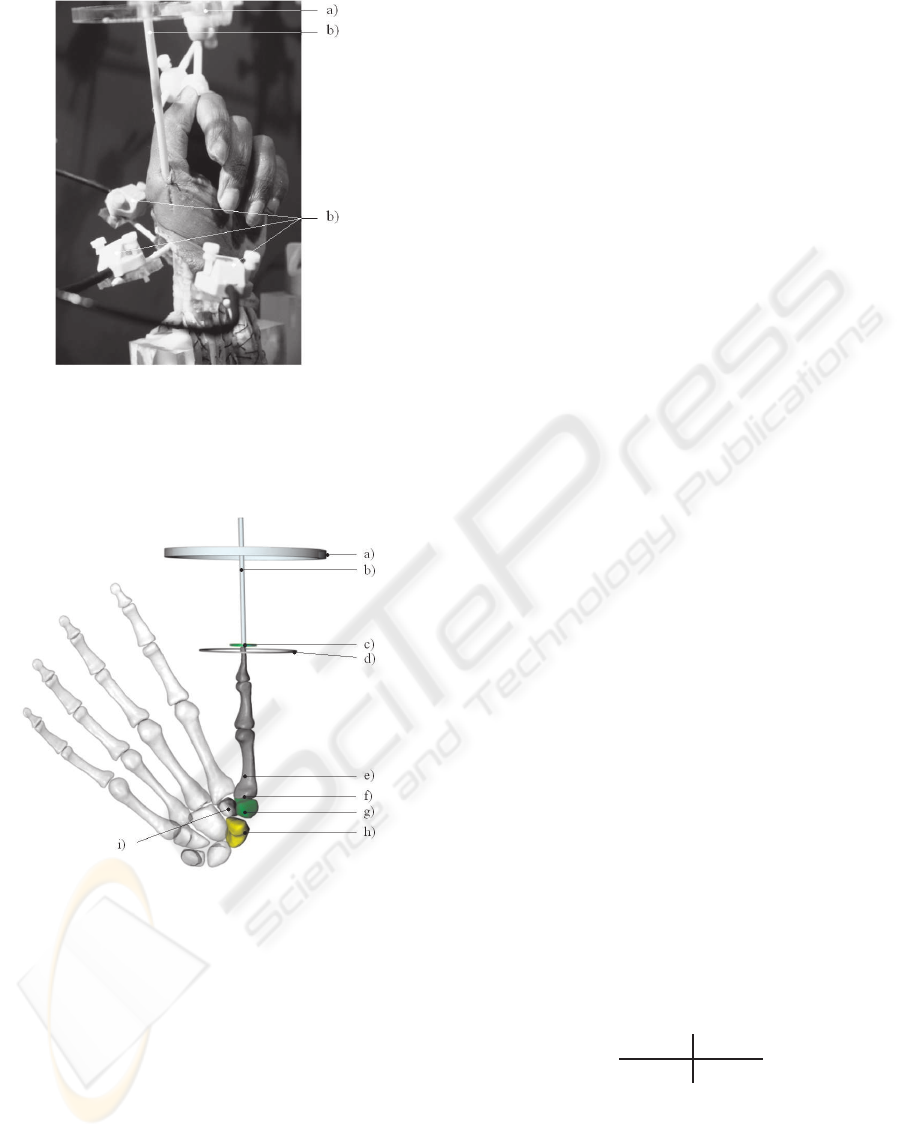
Figure 1: Experimental setup from (Essers, 2006) (printed
with permisson) The experimental setup: Prepared cadav-
eric hand and sensors. a) Manipulation guidance ring. b)
Manipulation bar. c) Space track sensors, attached to ra-
dius, saphoid and trapezium.
Figure 2: Setup of the kinematic 3D Model: a) Manipula-
tion guidance ring. b) Manipulation bar. c) TCP (tip center
point) of the thumb. d) TCP circumduction plane. e) Os
metacarpale 1. f) CMC joint. g) Os trapezium. h) Os
scaphoid. i) Os trapezoid.
trajectories of the scaphoid and trapezium during cir-
cumduction. The combined and seperated adoption
of the data generated different combined and decom-
posed trajectories for trapezium and scaphoid articu-
lation during circumduction of the thumb.
4 SIMULATION RESULTS
Workspace simulation and decomposition relvealed,
that the STT joints articulation contribute 22% ±
11,47 of the TCP circumduction workspace of the
thumb. Fig. 3 visualizes the results of the simula-
tion. The combined partial workspace of scaphoid
and trapezium (Fig. 3 (a)) can be decomposed
into the scaphoid’s and trapezium’s component. The
scaphoids partial TCP workspace (Fig. 3 (d) and (e)
) turned out as more elliptical shaped.
5 ENHANCED ARTIFICIAL
THUMB PROTOTYPE FOR A
PROSTHETIC HAND
How can the previous results be used to improve the
function of an artifial hand?
The STT and CMC joints are located in the
metacarpus and they provide a very compact mor-
phological structure. Therefore, a compact func-
tional model of anatomic size can not easily be imple-
mented. According to (McKenzie, 1994), the grasp-
ing function of the hand is mainly determined by 4
main areas in the thumb’s workspace:
• Pad opposition
• Palm opposition
• Side opposition
• Virtual Finger
We combined this issue with our further results
and implemented an artificial thumb based on an ac-
tuated STT joints with 1 active rotation DOF and 1
passive elastic rotation DOF. The active rotation DOF
combines the ulnar and opposition-reposition axis
(abduction-adduction and supination-pronation) mea-
sured in (Essers, 2006). As a result, the metacarpal
articulation is supported and the thumb’s workspace is
enhanced. The passive elastic rotation DOF is under-
actuated and combined with the thumb’s CMC, PIP
and DIP flexion and extension. The corresponding
kinematics is given by the transformation:
R
∼
T
T
1
=
R
∼
R
T
1
R
∼
x
T
1
0 1
(8)
=
R
∼
A
ST
AASP
ST
AASP
A
ST
FE
(9)
ST
FE
A
M
AA
M
AA
A
M
FE
M
FE
A
M
SP
(10)
M
SP
A
P
FE
(11)
P
FE
A
I
FE
(12)
I
FE
A
T
1
. (13)
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
208
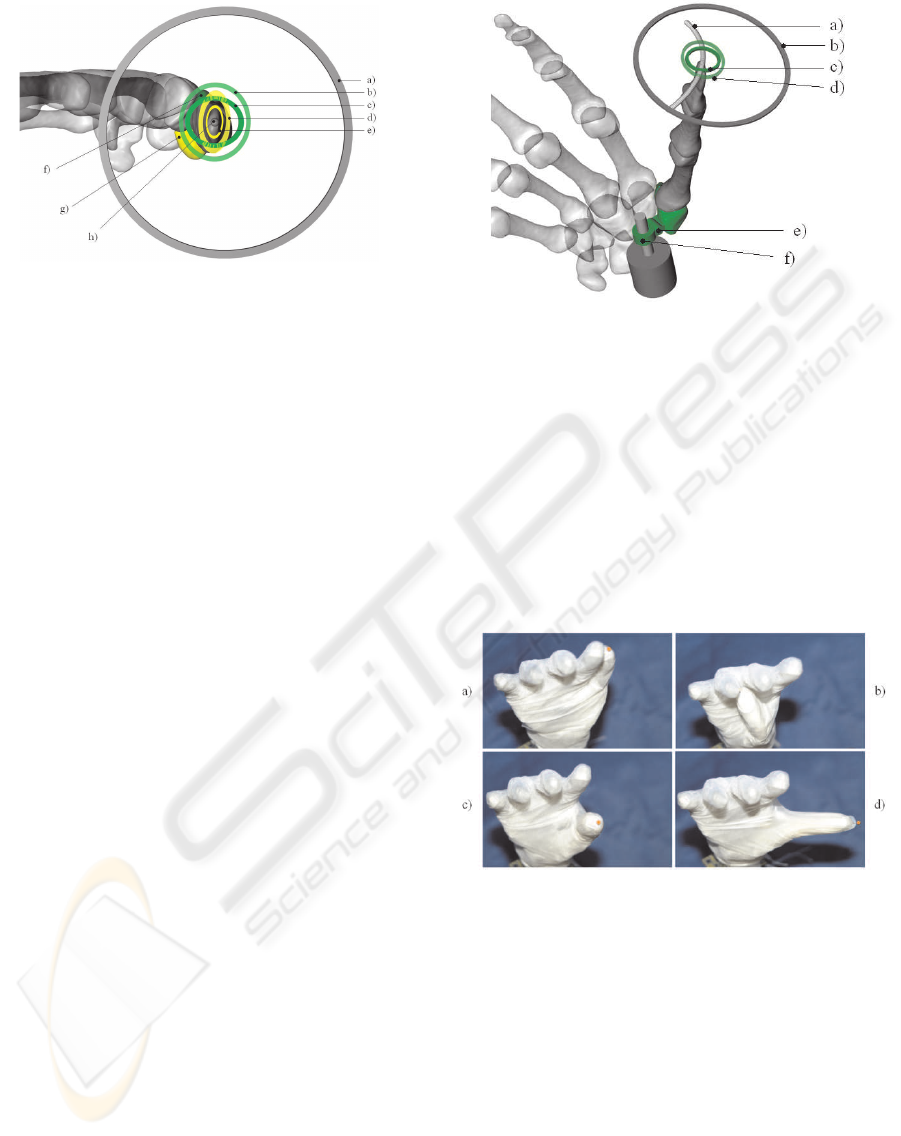
Figure 3: Simulation and decomposition of the Workspace
of the thumb’s metacarpal motion during circumduction:
a) Workspace of TCP circumduction movement, combin-
ing CMC and STT articulation. b) Simulated TCP (µ+ σ)
workspace resulting from STT articulation with fixed CMC.
(Partial scaphoid and trapezium movement.) c) TCP µ
workspace of the same articulation.
d) TCP (µ+σ) workspace resulting from Scaphoid articula-
tion with fixed Trapezium and fixed CMC. (Partial scaphoid
movement.)
e) TCP µ workspace of the former articulation.
f) Os trapezium.
g) Os scaphoid.
h) TCP of the thumb in center position.
where (9) describes the simplified STT articuation
with combined abduction-adduction and supination-
pronation kinematic axes.
AASP
A
ST
FE
describes the
passive flexion-extension DOF.
(10) describes CMC (metacarpal base) articula-
tion abduction-adduction, flexion-extension, and
supination-pronation kinematic axes.
(11) describes the flexion-extension of proximal pha-
lanx.
(12) describes the flexion-extension of distal phalanx.
(13) describes the constant translation from distal
phalanx to TCP 1 (Tip Center Point).
The partial TCP workspace resulting from the active
DOF is represented in Fig. 4. Experimental postures
of the enhanced artificial thumb prototype based on
the kinematic chain (13) are displayed in Fig. 5. Pos-
tures in 5 a) - c) are based on the simplified STT joint.
The extension posture (Fig. 5 d)) is positioned by a
combination of the simplified STT joint and the pas-
sive extension joint.
6 CONCLUSIONS
This investigation revealed, that the carpometacarpal
articulation of the thumb must be differentiated into
the contribution of the trapeziometacarpal joint and
the contribution of the STT joints. The simulation
Figure 4: Enhanced artificial thumb model for a prosthetic
hand. An active DOF in the region of the radial column
articulates the main axis of the STT joints. It combines
opposition-pronation and reposition-supination. It’s cor-
responding TCP workspace crosses the TCP’s neutral po-
sition and intersects the partial scaphoid-trapezium TCP
workspace in Fig. 3 (b). a) TCP trajectory along simpli-
fied STT DOF.
b) TCP workspace combining CMC and STT.
c) Combined scaphoid and trapezium workspace (σ).
d) Combined scaphoid and trapezium workspace (σ+ µ).
e) Passive flexion-extension DOF.
f) Active DOF combining opposition-pronation and
reposition-supination.
Figure 5: Experimental postures of the enhanced artificial
thumb prototype: a) Retroposition, b) Opposition, c) Neu-
tral position, d) Extension.
results revealed, that the joint movement of the STT
joints supports up to 1/3 ( 22% ± 11,47 ) of the mo-
tion range of the adduction, abduction, flexion and ex-
tension. The workspace of the thumb is significantly
enhanced by the motion of the STT joints. Hence
we propose, that adequate anthropomorphic models
of the thumb should simulate the kinematics of the
STT joints to approximate biomechanically correct
movements. Currently simplified kinematic concepts
of the articulation of the thumb - as presented in state-
of-the-art robot and artificial hands - commonly dis-
regard the fact, that the joint axes of the scaphoid and
AN ENCHANCED KINEMATIC MODEL OF THE HUMAN THUMB FOR AN ARTIFICIAL HAND
209

trapezium affect the trajectory of the thumb and it’s
TCP workspace.
The fact, that the rotation centre lies deeper in
the radial carpal column corresponds to an extended
workspace of the thumb. In the artificial thumb pre-
sented an STT joint with 1 active DOF and 1 pas-
sive, underactuated DOF is applied. As a result, the
thumb’s workspace is enlarged and biomechanically
more adequate. Some examples for extreme postures
of the thumb are given in Fig. 5 a),b) and d).
In combination with robust and forceful finger
kinematics (Franke and Bogdan, 2009) biomechani-
cally effective hand prostheses can be realised. We re-
sume, that these properties are excellent qualifications
for applications in the field of future hand prosthe-
ses, for example for biologically inspired neural pros-
theses (Bogdan and Franke, 2001) with an extended
range of performance.
ACKNOWLEDGEMENTS
The authors would like to thank Dr. Essers and Priv.
Doz. Dr. Jantea for providing further details about
their experimental setup.
REFERENCES
Bogdan, M. and Franke, M. (2001). Real time processing
of nerve signals for controlling an artificial hand. In
Proceedings of the IASTED Conference on Applied In-
formatics 2001. IASTED.
Butterfass, J., Grebenstein, M., and Hirzinger, H. L. G.
(2001). DLR hand II: Next generation of a dexterous
robot hand. In Proceedings of the 2001 IEEE Interna-
tional Conference on Robotics & Automation. IEEE
Robotics & Automation Society.
Cooney, W., Lucca, M. J., Chao, E. Y., and Lin-
scheid, R. L. (1981). The kinesiology of the thumb
trapeziometacarpal joint. In The Journal of Bone and
Joint Surgery. Journal of Bone and Joint Surgery, Inc.
Dornblueth, O., Zink, C., and Hildebrandt, H. (1998).
Pschyrembel - Klinisches Woerterbuch ( in German ).
Walter de Gruyter, Berlin, 52nd edition.
Essers, F. (2006). Untersuchung zur Kinematik im
Bereich des Scapho-Trapezio-Trapezoidalgelenks der
menschlichen Hand bei Zirkumduktion des Daumens
( in German ). F. Essers, Duesseldorf, 1st edition.
Franke, M. and Bogdan, M. (2009). A new lightweight,
robust and forceful finger for an artificial limb. In
Proceedings of the 2009 World Congress on Medical
Physics and Biomedical Engineering. Springer.
Frisch, H. (2001). Programmierte Untersuchung des Be-
wegungsapparates. Chirodiagnostik ( in German ).
Springer, Berlin, 3rd edition.
Liu, H., Wu, K., Meusel, P., Hirzinger, G., Jin, M., Liu, Y.,
Fan, S., Lan, T., and Chen, Z. (2007). A dexterous hu-
manoid five-fingered robotic hand. In Proceedings of
the 17th IEEE International Symposium on Robot and
Human Interactive Communication. IEEE Robotics &
Automation Society.
Lovchik, C. and M.A.Diftler (1999). The robonaut hand:
a dexterous robot hand for space. In Proceedings of
1999 IEEE International Conference on Robotics and
Automation. IEEE Robotics & Automation Society.
McKenzie, C. (1994). The Grasping Hand. Elsevier Sci-
ence, Amsterdam, 1st edition.
Rauber, A. and Kopsch, F. (2003). Anatomie des Menschen,
Band 1, Bewegungsapparat ( in German ). Toendury,
Berlin, 3rd edition.
Schulz, S., Pylatiuk, C., Reischl, M., Martin, J., Mikut, R.,
and Bretthauer, G. (2005). A lightweight multifunc-
tional prosthetic hand. In Robotica. IEEE Robotics &
Automation Society.
Speckmann, E. J. and Wittkowski, W. (1998). Bau und
Funktionen des menschlichen Koerpers. Praxisorien-
tierte Anatomie und Physiologie ( in German ). Urban
& Schwarzenberg, Munic, 18th edition.
Wilkinson, D., Weghe, M. V., and Matsuoka, Y. (2003). An
extensor mechanism for an anatomical robotic hand.
In Proceedings of the 2003 IEEE International Con-
ference on Robotics and Automation. IEEE Robotics
& Automation Society.
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
210
