
GLOBAL BIOMECHANICAL EVALUATION DURING WORK
AND DAILY-LIFE ACTIVITIES
Francesco Draicchio, Alessio Silvetti, Federica Amici, Sergio Iavicoli and Alberto Ranavolo
Istituto Superiore per la Prevenzione e la Sicurezza del Lavoro (ISPESL), Monteporzio, Italy
Rossana Muscillo, Maurizio Schmid, Tommaso D’Alessio
Dpt. Elettronica Applicata, Università di Roma Tre, Via della Vasca Navale, 84, Roma, Italy
Giorgio Sandrini, Michelangelo Bartolo
Istituto Mondino, Università di Pavia, Via Ferrata Adolfo, 27100 Pavia, Italy
Giancarlo Orengo, Giovanni Saggio, Carmela Conte
Dpt. Ingegneria Elettronica, Università Tor Vergata, via Politecnico 1, 00133 Roma, Italy
Keywords: Gait analysis, Accelerometer, Gyroscope.
Abstract: Advances in technology in the last decades have provided the opportunity to observe human behaviour in
the three dimensional space with great spatial accuracy. Optoelectronic techniques for measurements of
human motions have been developed. However, it is found that, in the work environments, these methods
are complicated to set up and can only easily be applied in laboratory. On the other hand, electronic sensors
such as accelerometers and gyroscopes, have been developed and applied to solve the relevant outdoor
application problems of the image-based methods. These sensors have been evaluated for the 3D
measurement of trunk, lower and upper segments, during posture, walking and rising from a chair, in both
normal and pathological conditions. In the present study we used a device including accelerometers and
gyroscopes in order to calculate the angular behaviour of the pelvis on the sagittal, frontal and horizontal
plane, during the following tasks: walking, gait initiation, gait termination, seat-to-stand and stand-to-seat,
squat, standing anterior and lateral reaching and grasping, anterior and lateral trunk flexion and trunk
rotation. The assessment of pelvis during posture and movement is important in improving our
understanding of the motor strategies at work and preventing injuries (i.e. low back pain) and mechanical
whole body fatigue. The calculated angles were compared to that computed by a high-quality optical motion
analysis system (SMART-E System, BTS, Milan, Italy) consisting of eight infra-red cameras (operating at
120 fps) to detect the movements in three-dimensional space of three retro-reflective markers (15 mm
diameter). For the comparison of the Range of Motions (ROMs) we used the root mean squared error
(RMS) whereas the Coefficient of Multiple Correlation (CMC) was used to evaluate overall waveform
similarity of instantaneous angle curves. Preliminary results showed a high similarity between the extracted
angle tracks (anterior-posterior behaviour on the sagittal plane, pelvic obliquity and intra-extra rotation of
the pelvis) in all of the acquired tasks. We also found low errors in the computation of the corresponding
ROMs. This study suggests to apply an accurate, inexpensive and simple method to measure the kinematics
of the pelvis during common work and daily-life activities.
1 INTRODUCTION
Advances in technology in the last decades have
provided the opportunity to observe human
behaviour in the three dimensional space with great
spatial accuracy. Image-based methods for the
measurement of human motion have been
developed, such as optoelectronic techniques
(Medved, 2001; Cappozzo, 2005). However, it is
108
Draicchio F., Silvetti A., Amici F., Iavicoli S., Ranavolo A., Muscillo R., Schmid M., D’Alessio T., Sandrini G., Bartolo M., Orengo G., Saggio G. and Conte
C. (2010).
GLOBAL BIOMECHANICAL EVALUATION DURING WORK AND DAILY-LIFE ACTIVITIES.
In Proceedings of the Third International Conference on Biomedical Electronics and Devices, pages 108-112
DOI: 10.5220/0002740901080112
Copyright
c
SciTePress

found that, in work environments, these methods are
complicated to set up and can only easily be applied
in laboratory. On the other hand, electronic sensors
able to provide orientation based on accelerometers
and gyroscopes have been developed and applied to
solve the relevant outdoor application problems of
the image-based methods. These sensors have been
used and evaluated for the 3D measurement of trunk,
lower and upper segments, during posture, walking
and rising from a chair, in both normal and
pathological conditions (Pfau, 2005, Lau, 2008,
Plamondon, 2007, Coley, 2007, Veltink, 2007,
Boonstra, 2006, Zijlstra, 2008).
In the present study we compared the angular
behaviour of the pelvis in the sagittal, frontal and
horizontal plane calculated with a wearable inertial
device including triaxial accelerometers and triaxial
gyroscopes with that computed with a high precision
and accuracy optoelectronic motion analysis system.
We recorded the angle trajectories and excursions
during the following tasks: standing anterior
reaching and grasping, standing oblique reaching
and grasping, standing oblique opposite reaching
and grasping, anterior trunk flexion and sit to stand.
The assessment of pelvis during posture and
movement is important in improving our
understanding of the motor strategies at work and
preventing injuries (i.e. low back pain) and
mechanical whole body fatigue.
2 MATERIALS AND METHODS
Ten healthy male subjects (mean age 38 ± 4 years,
range 20-55 years) were enrolled. All gave their
written informed consent after receiving a full
explanation of the study, which conformed to the
requirements of the Declaration of Helsinki.
We used a Wi-Fi transmission miniaturized
device integrating an accelerometer and a gyroscope
(MicroStrain 3DM-GX2, MicroStrain, Inc.,
Williston, USA) placed directly on the skin over the
sacrum. The device offers a range of output data
quantities from fully calibrated inertial
measurements to computed orientation estimates.
All quantities are fully temperature compensated and
corrected for sensor misalignment. The angular rate
quantities are further corrected for G-sensitivity and
scale factor non-linearity to third order.
The extracted curves and the calculated angles
were compared to those simultaneously acquired by
a high-quality optical motion analysis system
(SMART-E System, BTS, Milan, Italy, Ferrigno and
Pedotti 1985) consisting of eight infra-red ray
cameras (operating at 120 fps) to detect the
movements in three-dimensional space of three
retro-reflective markers placed on the skin over the
sacrum and the right and left anterior superior iliac
spinae. Data processing was performed using
Analyzer software (BTS, Milan, Italy).
Before starting formal measurements, all
subjects did a practice session to familiarize
themselves with the experimental procedure and
with the tasks consisting of eleven movements
performed in a quiet room with normal indoor
temperature and lighting. The performed tasks were:
standing anterior reaching and grasping, standing
oblique reaching and grasping, standing oblique
opposite reaching and grasping, anterior trunk
flexion and sit to stand. Standing reaching and
grasping tasks have been performed with the subject
starting from a standing posture, with the trunk kept
upright, left and right arm lying alongside the body
and performing the movement, in a natural fashion.
In the anterior reaching and grasping the subjects
picked up, with the right hand, a cylinder (diameter,
3 cm; height, 6 cm; weight, 300 g) positioned on a
shelf in line (on the anterior direction) and at the
same height of the right shoulder, and returned the
cylinder to the starting position. The oblique and the
oblique opposite reaching and grasping tasks were
performed in the same manner of the anterior
reaching and grasping but with the object positioned
at ±45° with respect to the anterior direction. The
anterior trunk flexion was performed through a
maximal anterior flexion of the trunk. In the sit to
stand movement the subjects were seated
comfortably on a chair and got stand up in a natural
manner and at their preferred velocity. Ten cycles
were recorded for task and each person. Angular
excursion data were normalized to the movement
duration and reduced to 100 samples. For the
comparison of the Range of Motions (ROMs) we
used the root mean squared error (RMS):
()
2
,,
11
N
oi di
xx
RMS
n
=
−
=
∑
(1)
whereas the Coefficient of Multiple Correlation
(CMC), i.e. the positive square root of the adjusted
coefficient of multiple determination (Kabada et al.
1989, Steinwender et al. 2000) by means of the
following formula:
GLOBAL BIOMECHANICAL EVALUATION DURING WORK AND DAILY-LIFE ACTIVITIES
109
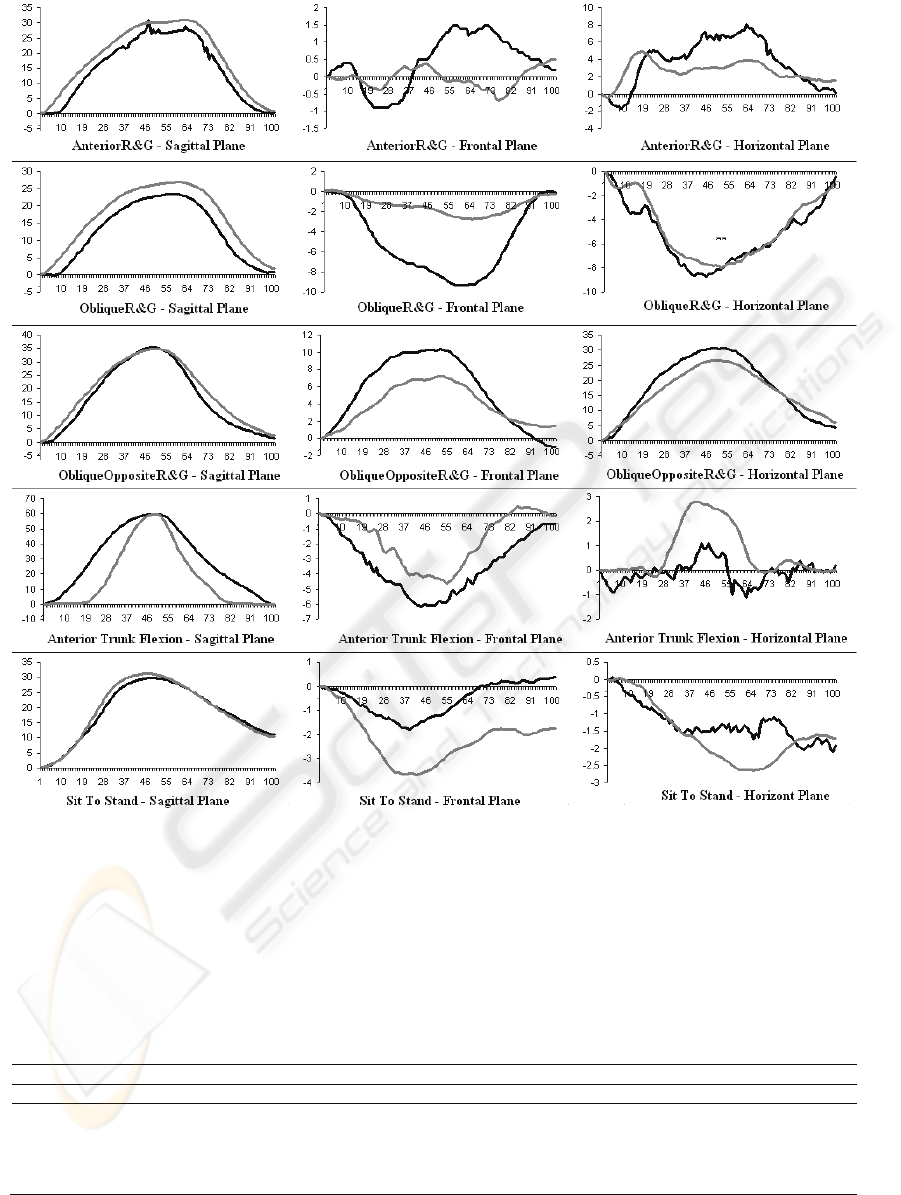
Figure 1: First column: pelvic angular behaviour in the sagittal plane (pelvic tilt); second column: pelvic angular behaviour
in the frontal plane (pelvic obliquity); third column: pelvic angular behaviour in the horizontal plane (pelvic intra-extra
rotation). 1
th
, 2
th
, 3
th
, 4
th
and 5
th
rows show the pelvic mean angular curves during the standing anterior reaching and
grasping, the standing oblique reaching and grasping, the oblique opposite reaching and grasping, the anterior trunk flexion
and the sit to stand respectively. In black and grey, curves acquired and computed by the high-quality optical motion
analysis system and the Wi-Fi transmission miniaturized device respectively. On x-axis and y-axis are reported percentage
cycle time duration and degrees respectively.
Table 1: ROMs (mean±standard deviation) calculated by the optoelectronic motion analysis system (Opt), by the wearable
inertial device (G+A), the paired t test P value, the RMS and the CMC for each motor task and for sagittal, frontal and
horizontal plane.
Sagittal Frontal Horizontal
Opt G+A P RMS CMC Opt G+A P RMS CMC Opt G+A P RMS CMC
AnteriorR&G 27.7±5.7 31.7±8.1 0.5 4.0 0.96 0.3±0.6 1.7±0.3 0.023 1.4 0.50 8.2±1.7 6.6±0.8 0.2 2.0 0.61
ObliqueR&G 23.5±1.5 26.9±1.8 0.066 3.4 0.94 6.3±4.6 3.3±1.2 0.336 5.2 0.82 9.9±2.0 9.7±1.5 0.897 1.6 0.96
ObliqueOppositeR&G 36.2±3.2 36.0±3.1 0.942 5.3 0.98 10.7±1.0 7.7±1.2 0.029 3.5 0.84 31.5±0.7 28.0±0.9 0.006 3.5 0.96
AnteriorTrunkFlexion 59.9±0.6 60.4±2.1 0.712 1.6 0.88 6.3±0.2 5.3±1.7 0.369 1.8 0.77 1.9±0.3 3.4±0.4 0.007 1.5 0.31
SeatToStand 30.6±2.0 31.6±1.6 0.536 3.4 0.99 1.9±0.4 4.0±1.0 0.013 2.1 0.70 ‐1.2±0.9 3.0±0.2 0.001 4.1 0.76
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
110

()
()
∑∑
∑∑
==
==
−
−
−
−
−=
N
i
T
t
it
N
i
T
t
tit
yy
TN
yy
NT
MC
11
2
11
2
1
1
)1(
1
1C
(2)
where T=100 (number of time points within the
cycle), N=2 (number of curves),
it
y
is the value at
the tth time point in the ith cycle,
t
y is the average
at time point t over N cycles:
1
1
=
=
∑
N
tit
i
y
y
N
(3)
and
y
is the grand mean of all
it
y :
∑∑
==
=
N
i
T
t
it
y
NT
y
11
1
(4)
CMC was used to evaluate overall waveform
similarity of instantaneous angle curves: the closer
to 1 the CMC, the more similar the waveforms. The
statistical analysis was performed using SAS 8.2
(SAS Institute Inc., Cary, NC, USA). A paired t test
was applied in order to compare ROMs calculated
by the two techniques. P-values less than 0.01 were
considered statistically significant.
3 RESULTS
Results are summarized in Figure 1 and in Table 1.
1
th
, 2
th
, 3
th
, 4
th
and 5
th
rows of Figure 1 show the
pelvic mean angular curves during the standing
anterior reaching and grasping, the standing oblique
reaching and grasping, the oblique opposite reaching
and grasping, the anterior trunk flexion and the sit to
stand respectively. The 1
th
, 2
th
and 3
th
column of
Figure 1 show the pelvic angular behaviour in the
sagittal plane (pelvic tilt), in the frontal plane (pelvic
obliquity) and in the horizontal plane (pelvic intra-
extra rotation). In black and grey, curves acquired
and computed by the high-quality optical motion
analysis system and the Wi-Fi transmission
miniaturized device respectively. Table 1 shows the
ROMs (mean±standard deviation) calculated by the
optoelectronic motion analysis system (Opt), by the
wearable inertial device (G+A), the paired t test P
value, the RMS and the CMC for each motor task
and for sagittal, frontal and horizontal plane.
The results showed high similarity between the
extracted angle curves (Figure 1, Table 1) with
respect to the pelvic tilt on the sagittal plane
(CMC>0.88), the pelvic obliquity on the frontal
plane (CMC>0.70 except for the anterior reaching
and grasping) and the pelvic intra-extra rotation on
the horizontal plane (CMC>0.61 except for the
anterior trunk flexion). We also found low root mean
square errors in the computation of the
corresponding ROMs in the sagittal plane
(RMS≤5.3). Statistically significant differences in
the calculated ROMs were found only for the
standing oblique opposite reaching and grasping,
anterior trunk flexion and sit to stand on the
horizontal plane (P>0.01).
4 CONCLUSIONS
We compared data acquired and computed by two
different complementary technologies: a wearable
inertial device and an optoelectronic system. The
former allows a simple setup and outdoor
acquisitions (e.g. work environment); the latter
represent the kinematic gold standard acquisition
system but it is not simple to set up in work
environment. The use of wearable inertial devices
can be considered very useful when a simple
biomechanical human global approach is needed
(e.g. study of the human mechanical energy
expenditure, of the whole-body stiffness and of the
centre of mass behaviour). Our results suggest also
the use of these devices in work environment
applications, where specific segmental analyses are
needed, such as the study of the pelvic behaviour. In
these conditions, they yield good precision and
accuracy values on those measures of angular
components that present high magnitude of ROMs,
such as sagittal and frontal component of the our
study. Planes on which ROMs have low amplitudes
don’t show good similarity of curves and present
high root mean square errors.
Furthermore, this study suggests applying these
accurate, inexpensive and easy to use methods to
measure the kinematics of the pelvis during common
work and daily-life activities.
These devices could as well be used by a
biofeedback approach, which is widely considered
as a valid tool in various rehabilitation contexts
(Nelson, 2007). Kinematic-based (Van Vliet, 2006)
biofeedback frameworks have been proposed for a
routine inclusion in rehabilitation protocols. On the
other hand, there aren’t evidences on the use of these
devices in the return back to work environment of
workers after injuries. As these techniques share the
advantage of being suitable for workers' self-
administration, they may also be suitable for use in
GLOBAL BIOMECHANICAL EVALUATION DURING WORK AND DAILY-LIFE ACTIVITIES
111

telerehabilitation, which is not yet widespread
mainly due to the unavailability of specific devices,
validated protocols and appropriate operators'
educational programs. Indeed, the use of these
methods at home or at work may allow workers after
injuries to gain control over their own motor
recovery, to increase frequency and duration of
physical training and to improve personal
involvement and satisfaction in the rehabilitation
program. A miniaturized, wearable device for
kinematic biofeedback, interfaced with a
telerehabilitation platform, may improve the quality
of rehabilitation due to a faster getting back of
workers to their usual environments, with a
beneficial effect on quality of life, a minimization of
lost opportunity costs for employers, who can be
treated onsite reducing absence at work, and a
decrease of the economic burden for the healthcare
system. These techniques will be relevant for the
National Health Service in order to provide data
about the feasibility of rehabilitation treatment
transfer from hospitals to work settings. Such
transfer may allow the National Health Service to
reduce costs and ameliorate the managing of the
resources employed in this context.
REFERENCES
Medved V. Measurement of human locomotion, Boca
Raton, USA: CRC Press, 2001.
Cappozzo A, Della Croce U, Leardini A et al., “Human
movement analysis using stereophotogrammetry. Part
1: Theoretical background”, Gait & Posture
2005;21:186-96.
Boonstra Miranda C., Rienk M.A. van der Slikke, Noe
L.W. Keijsers, Rob C. van Lummel, Maarten C. de
Waal Malefijt, Nico Verdonschot, “The accuracy of
measuring the kinematics of rising from a chair with
accelerometers and gyroscopes”, Journal of
Biomechanics 39 (2006) 354–358.
Coley Brian, Brigitte M. Jolles, Alain Farron, Aline
Bourgeois, Francois Nussbaumer, Claude Pichonnaz,
Kamiar Aminian, "Outcome evaluation in shoulder
surgery using 3D kinematics sensors”, Gait & Posture
25 (2007) 523–532.
Lau Hongyin, Kaiyu Tong, “The reliability of using
accelerometer and gyroscope for gait event
identification on persons with dropped foot”, Gait &
Posture 27 (2008) 248–257.
Plamondon A., Delisle A., Larue C., Brouillette D.,
McFadden D., Desjardins P., Lariviere C., “Evaluation
of a hybrid system for three-dimensional measurement
of trunk posture in motion”, Applied Ergonomics 38
(2007) 697–712.
Pfau Thilo, Thomas H. Witte and Alan M. Wilson, “A
method for deriving displacement data during cyclical
movement using an inertial sensor”, The Journal of
Experimental Biology 2005, 208, 2503-2514.
Veltink Luinge H.J, P.H., Batenc C.T.M., “Ambulatory
measurement of arm orientation”, Journal of
Biomechanics 40 (2007) 78–85
Zijlstra Agnes, Jon H.M. Goosen, Cees C.P.M. Verheyen,
Wiebren Zijlstra, “A body-fixed-sensor based analysis
of compensatory trunk movements during
unconstrained walking”, Gait & Posture 27 (2008)
164–167.
Ferrigno, G. and Pedotti A., “ELITE: a digital dedicated
hardware system for movement analysis via real-time
TV signal processing”, IEEE Trans. Biomed. Eng. 32
(1985) 943–950.
Kabada M.P., Ramakrishnan M.E., Gainey W.J., Gorton
G. and Cochran G.V.B., “Reproducibility of
kinematic, kinetic, and electromyographic data in
normal adult gait. Journal of Orthopedic Research, 7
(1989) 849-860.
Steinwender G., Saraph S., Scheiber S., Zwick E.B. and
Uitz C., “Intrasubject repeatability of gait analysis data
in normal and spastic children”, Clinical
Biomechanics, 15(2) (2000), 134–139.
Nelson LA, “The role of biofeedback in stroke
rehabilitation: past and future directions”, Topics in
Stroke Rehabilitation, 14 (2007) 59-66.
Van Vliet PM, Wulf G., “Extrinsic feedback for motor
learning after stroke: What is the evidence?”,
Disability and Rehabilitation, 28 (2006) 831-840.
BIODEVICES 2010 - International Conference on Biomedical Electronics and Devices
112
