
A REAL-TIME HYBRID METHOD FOR PEOPLE COUNTING
SYSTEM IN A MULTI-STATE ENVIRONMENT
Ali Rezaee
Department of Engineering, Khayam University of Mashhad, Falhi street, Mashhad, Iran
Hojjat Bagherzadeh, Vahid Abrishami
Department of engineering, Azad University of Mashhad, Mashhad, Iran
Hamid Abrishami
Khorasan Science And Technology Park, Mashhad, Iran
Keywords: Detecting and tracking people, PCA, Human shaped objects, Feature extraction, Dynamic-VCM, Crowd
estimation, Solitude scenes.
Abstract: Detecting and tracking people in real-time in complicated and crowded scenes is a challenging problem.
This paper presents a multi-cue methodology to detect and track pedestrians in real-time in the entrance
gates using stationary CCD cameras. The proposed approach is the combination of two main algorithms, the
detecting and tracking for solitude situations and an estimation process for overcrowded scenes. In the
former method, the detection component includes finding local maximums in foreground mask of Gaussian-
Mixture and Ω-shaped objects in the edge map by trained PCA. And the tracking engine employs a
Dynamic VCM with automated criteria based on the shape and size of detected human shaped entities. This
new approach has several advantages. First, it uses a well-defined and robust feature space which includes
polar and angular data. Furthermore due to its fast method to find human shaped objects in the scene, it’s
intrinsically suitable for real-time purposes. In addition, this approach verifies human formed objects based
on PCA algorithm, which makes it robust in decreasing false positive cases. This novel approach has been
implemented in a sacred place and the experimental results demonstrated the system’s robustness under
many difficult situations such as partial or full occlusions of pedestrians.
1 INTRODUCTION
Detecting and tracking of moving objects has been
at the core of visual surveillance applications for
both scientific and industrial research in the past few
years. People tracking naturally play a key role in
any visual surveillance system. Its application ranges
from security monitoring, pedestrian counting,
traffic and pedestrian control, detection of
overcrowded situations in public buildings to tourist
flow estimations.
People counting methods fall into two major
categories, the first category is based on people
detection and the second one uses feature-based
algorithms.
The former implies the detection of pedestrians
in order to count them. For instance, Goncalo
Monteiro et al. (Monteiro and Peixoto, 2006) use
Haar-like features and AdaBoost algorithm to
discriminate pedestrians which can work in a real
time manner; however, as a result of only
considering spatial filters it has a high false positive
rate. Viola et al. (Viola and Jones, 2003) compute
both spatial and temporal rectangle filters by
efficiently using the integral image technique, and
model a pedestrian classifier using a variant of
AdaBoost. The system is trained based on full
human figures and due to this fact the system needs
to have the whole body figure to work properly,
therefore it has problems in detection of occluded or
partial human figures. Ken Tabb et al. (Tabb and
119
Rezaee A., Bagherzadeh H., Abrishami V. and Abrishami H. (2010).
A REAL-TIME HYBRID METHOD FOR PEOPLE COUNTING SYSTEM IN A MULTI-STATE ENVIRONMENT.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 119-126
DOI: 10.5220/0002734601190126
Copyright
c
SciTePress

K.a.D., 2004) proposed a method which employs
Active Contour Models (ACM) to detect moving
objects and neural networks to classify the shapes
obtained by ACM as either 'human' or 'non-human'.
This technique is in contrast with other methods of
shape description which relies on having a one to
Figure 1: A sample input frame and the output results of
different steps of algorithm.
one correspondence between landmark points on the
shape model and the current contour, and still suffers
from occlusion. A.Koschan (Koschan,S.K.K, 2002)
uses Active Shape Models (ASM) as human shaped
objects detector; in addition the colour information
contributes to the solution of occlusions.
Nevertheless, the tracking of a person becomes
rather difficult if the image sequence contains
several moving persons with similar shape and the
task may fail if the person is partially occluded.
These approaches seem to fail in situations where
people walk next to each other and/or occlude one
another; however, Zhao and Nevatia (Zhao and
Nevatia, 2001) employ Markov chain Monte Carlo
technique as a method for finding the omega pattern,
formed by the head and shoulders, which can
overcome the occlusion problem but the complexity
of MCMC method is an obstacle against working in
a real time manner.
The second category uses the image processing
statistical methods instead of detecting people for
the counting task. These methods apply different
features of objects which can be the blob size
(Masoud and Papanikolopoulos, 2001) , (kong, Gray
and Hai, 2006), (Aik and Zainuddin, 2009), the
Fractal Dimension (Rahmalan, Nixon and Carter,
2006), the bounding box (Masoud and
Papanikopoulos, 2001), and also edge density (kong,
Gray and Hai, 2006), (Villamizar and Sanfeliu,
2009). These methods can be employed for real time
application but they have lower accuracy than the
methods in the first category.
In this paper we explorer an alternative technique
based on a novel integration of multiple hypotheses
for the detecting and tracking of human head-
shoulder regions in order to count them in entrance
gates which brings this method into the first
category. In addition, for the crowd situations, we
employ an estimation method which uses spatial
features i.e. blob size, edge density and orientation,
which places this component into the second one.
The algorithm does not produce unique trajectories,
but we show that after a one-time estimation of a
systematic correction factor based on manually
labelled ground truth data, accuracies up to 99 % can
be achieved for real-world scenarios. A snapshot of
our results is shown in Fig. 1.
The outline of this paper is as follows. Section 2
first gives a brief description of the system, in
addition reviews the different algorithms and their
role in this approach. We illustrate a detailed
analysis of our real-world tests of the system in
section 3. And finally we conclude the paper in
Section 4.
2 SYSTEM DESCRIPTION
Most of the previous works, assume that pedestrians,
regardless of their clothes and hairstyles, display a
typical Ω-like shape which is formed by their heads
and shoulders. But in some areas like the sacred
places where religious people wear special clothes,
other potential head candidates can come into
account, namely in an Islamic place most of women
wear a long black veil and clergymen wear a special
hat which can result in different shape of heads, like
O or Λ. Based on this fact, beside employing the Ω-
like shapes extraction for finding heads, we also
notice O-like and Λ-like shapes. An efficient feature
vector for demonstrating the head shape features
also have been developed.
Lots of accurate methods like Zhao et al. (Zhao
and Nevatia, 2001) suffer from time complexity and
do not fit into real time constraints. Since most of
counting applications are needed to be real time, we
apply a further pre-processing step and also a
trained PCA in order to find heads while reducing
the processing time.
In order to find heads, first a foreground map,
based on Gaussian Mixture Models (GMM)
(Stauffer and Grimson, 1999) is used to segment the
objects from the background which can overcome
the known problems of adaptive background models.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
120
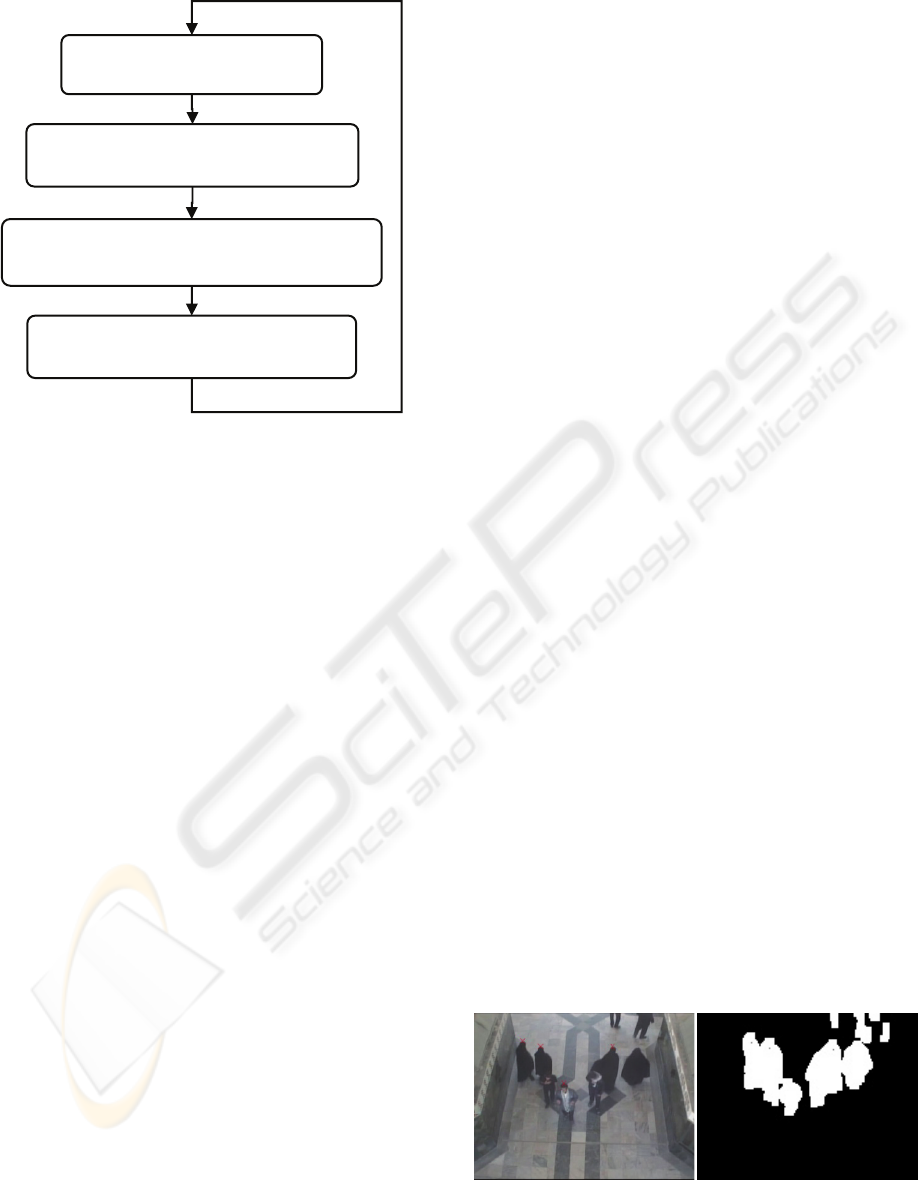
Figure 2: The block diagram of our algorithm.
Then a dynamic sized mask is applied to
eliminatethe unwanted background cues. Next, to
find the foreground local maximums as head
candidates, we apply the Zhao et al. method (Zhao
and Nevatia, 2001). Furthermore with our PCA
based head shape detection algorithm on foreground
pixels, we find heads.
Once the people are located in each individual
image, it is necessary to track them across frames.
This is achieved by using our robust implementation
of Vector Coherence Mapping (VCM) (Quek and
R.B.a.F, 2006) named Dynamic-VCM.
In overcrowded scenarios, counting people
individually would be a time consuming process,
and the accuracy would also decrease. These are two
big deficiencies in a real-time application.
Furthermore, in order to overcome this issue, the
proposed system automatically determines whether
the situation is a crowded one or a solitude one. In
the former case, our method employs the head
detection and tracking approach and in the latter, we
utilize a crowd estimation algorithm.
The organization of our algorithm is as follow as
shown in block diagram in Fig. 2:
1- Track the heads found from the last frame
and mark their containing cells. Certainly if
this is the first frame, we do not have any
found heads.
2- After that, we find the foreground
mask local maximums as head candidates in the
remaining unmarked cells. We use the fast Zhao
(Zhao and Nevatia, 2001) method in this step. If
there are only walking persons in the scene, we
are sure that the local maximums of foreground
mask are heads of peoples, if not, we do not use
this step.
3- Finally, detecting head shapes in the
remaining cells. Our head detection is based on
(Zhao and Nevatia, 2001) idea but it is
completely different. We use different and more
efficient feature vector, and also use fast PCA
method, instead of slow HMM method.
2.1 Pre-processing
In order to find the head candidates, (Zhao and
Nevatia, 2001) used a linear search method on the
foreground pixels which can be really time
consuming and also is an obstacle especially in real-
time applications. In addition, as a mean to increase
the performance of algorithm, we have added a pre-
processing step which works as follow; Moreover,
as the result of installing the camera in a specified
angle, the captured images have a special angle and
also the size of heads are nearly the same in the
image.
First, we divide the image into a grid, and this
grid division is in such a way that more than one
head won’t be able to fit in each cell at most. So in
the searching method, if we find a head in a cell, we
won’t look for any other heads in that cell.
Furthermore this head can be found by any of the
methods namely tracking the previous frame, finding
foreground local maximums, or the head shape
detection as described below.
2.2 Finding Foreground Local
Maximums
This method detects the heads which are on the
boundary of the foreground (Zhao and Nevatia,
2001). As a result of putting cameras way above the
ground, the head of a human has the least chance to
be occluded and in addition the human is small;
therefore this algorithm has a high detection rate.
The basic idea is to find the local vertical peaks of
the boundary. These peaks are being considered as
(a) (b)
Figure 3: The process of finding local maximums. (a) The
result of method. (b) Foreground mask.
Draw a grid on next frame image
based on head size
Match and track founded heads in new frame
and mark their containing cells
Find foreground local maximums as head
candidates in the remaining cells and mark them
Find head shapes based on our method
in the remaining foreground cells
A REAL-TIME HYBRID METHOD FOR PEOPLE COUNTING SYSTEM IN A MULTI-STATE ENVIRONMENT
121

humans if they are within a region along the
boundary whose size can be counted as the size of a
human; however, the peaks which don’t have
enough foreground pixels in that region will be
eliminated. Flat peaks are also allowed in a way that
the head top is the centre of the flat peak. This
process has been shown in Fig. 3.
2.3 Feature Extraction
Experiences from previous works show that most of
the methods as pedestrian detector which use
features, are based on finding the shaped objects
as head or the shape of the whole human figure in
the edge map image. In most crowded scenes, body
occlusion can cause some parts of body not to be
seen and makes its shape deficient. Nevertheless, the
shape of human head is almost unique and tends to
be like in fact by setting up the camera in a good
angle (near to vertical) we do not have any occlusion
on heads.
Zhao features (Zhao and Nevatia, 2001) for
head detection have been used by most of previous
works. It first selects some good points on the
contour of head and uses their positions and their
normal vector angle as a feature vector model. It
then checks if each point can be the top of a head by
employing (1):
,
∑
.
(1)
where
,…,
and
,…,
are denoted as
the positions and the normal units of the model
points respectively, when the head top is at (x,y). A
point can be considered as the top of a head if S is
lower than a threshold.
The head detector (Rahmalan, Nixon and Carter,
2006) employs the distance transform in order to
find the corresponding points. For each point of the
model, if it exists on the edge map, the point itself
will be considered as the point of model.
(a) (b)
Figure 4: A well-defined and improper samples of the
model point and its corresponding with the same values
for S parameter by the equation (1).
On the other hand, the nearest point on the edge
map will be counted as the point of model. Fig. 4.a
illustrates a sample of well-defined corresponding
points, in which the black points are that of the
model, and the red points are the discovered
corresponding points. Assuming that the angle of
normal vector of each point is good enough, the
calculated value for S is approximately around 0.8.
Nevertheless, in real-life scenario the points are not
as good as mentioned. Due to only considering the
nearest point on the edge map and not taking into
account their spatial position to each other, the
obtained points may not have a great relation
towards each other. As a result of not having a great
quality edge map, there might be some missing edge
points or existing a huge amount of accumulated
edge points in a special place of the image.
Fig. 4.b shows an improper sample of these
points. As it can be seen the obtained edge points
have the same distance as Fig. 4.a, but they have no
semantic relations. But if accidentally the angle of
normal vector of points satisfies the criteria, which
may occur a lot, the value of S in this image has the
same value as that of in Fig. 4.a.
In the proposed method, in order to locate the
position of corresponding points, we use a different
method in which instead of using the top head as the
coordinate point, we consider the centre of -shaped
model. In addition, our selected points are being
chosen in a way that each point has a particular
angle towards the reference point; moreover the
angles between each two successive points are
equal.
In order to find the corresponding points of the
model point, these two conditions should be
satisfied. First for each model point the
corresponding point should have the same angle
towards the reference point and second its distance
should be equal or greater than the model point
towards the reference point. In a situation which no
(a) (b)
Figure 5: A well-defined and improper samples of the
model point and its corresponding based on our proposed
method.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
122

corresponding point can be found, the algorithm
assumes that this part of edge has been eliminated
and considers the model point as corresponding
point. A limited number of missing edge point is
permissible and exceeding this limitation results in
rejection of labelling the corresponding point as the
head object. The proposed feature extraction method
makes the points relation semantically strength and
decreases the probability of forming zigzag shapes
which were the shortcomings of the Zhao's (Zhao
and Nevatia, 2001) .Figure 5-a illustrates a set of
well-defined points with a great value for S
parameter and Figure 5-b shows the worst obtained
set of points with a lower value. As it can be seen
there are 4 missing points in figures b.
The S value can be determined by (2):
,y
e
O
m
.O
n
(2)
where
,…,
are the model points,
,…,
are corresponding points, ,
is the N-Vector of
(x,y) and λ is a constant coefficient which is equal to
0.25. In order to calculate the n
points, we simply
perform a linear search on the
corresponding
line.
2.4 Head Shape Detection
Head Shape detection algorithm is divided into two
parts. A fast contour searching method which detects
candidates for Ω-like shaped objects within the
foreground mask; it is based on principles described
by Zhao and Nevatia (Zhao and Nevatia, 2001). A
pedestrian contour is represented as model
consisting 19 points as described in 2.2. Then these
head candidates have to be verified, in which the
verifying method (Zhao and Nevatia, 2001) used a
Hidden Markov Model which suffers from time
complexity, and we used a fast method based on
PCA (Principle Component Analysis) as follows.
In (Zhao and Nevatia, 2001), the basic theory is
based on this fact that head and shoulder of
pedestrian is Ω-shaped objects, but on the other
hand, mostly in religious countries, some clergymen
wear special hats which make their heads and
Figure 6: Three samples of Ω, O and Λ shaped objects.
shoulders to be O-like objects, and also most of
women wear a black veil which makes them to be
more Λ-like. Therefore, in according to the
mentioned reasons, we employ three different model
point datasets for every each one of Ω, O and Λ
shaped objects as shown in Fig.6.
First in order to train the PCA, we manually
extract three set of head shape objects, and then for
each head compute the feature vector as described in
2.2, and use them as our training data sets. And by
training those extracted data sets, the PCA space for
each data set is being made separately.
For each data set, all corresponding image patches
are vectorized to form a data matrix
ij
X
, where each
row of it is a vectorized image patch.
(
},...,,{
21 ijKijijij
xxxX
=
where k is the number of
images)
For each
ij
X
, the covariance matrix, or the total
scatter matrix, is computed using the equation (3):
1
()()
K
T
ij ijk ij ijk ij
k
Xx x
μμ
=
Σ= − −
∑
a (3)
where µ is the sample mean of each patch. Applying
Principal Component Analysis (PCA) on
ij
XΣ
, the
eigenvalues of the covariance matrix are calculated
and the first m largest eigenvalues,
m
λ
λ
...
1
and their
zassociated eigenvectors,
m
ee ...
1
are selected to
produce a projection matrix for that region . Using
the projection matrix, PCA projects the original
image space of each region into a low-dimensional
space, while preserving as much information as
possible using much fewer coefficients.
For each training head image, the PCA projected
coefficients of all its regions are concatenated to
form the descriptor of the face. This descriptor can
directly be used along with a distance metric in the
recognition phase to identify the query faces.
(a) (b)
Figure 7: A snapshot of the input frame (a) and its head
detection result (b).
A REAL-TIME HYBRID METHOD FOR PEOPLE COUNTING SYSTEM IN A MULTI-STATE ENVIRONMENT
123

2.5 Dynamic-VCM Tracking
The tracking process is based on Vector Coherence
Map (VCM) (Quek and R.B.a.F, 2006), a correlation
based algorithm that tracks iconic structures (in this
case templates) in image sequence. The repetitive
processing steps in our framework ensure that
effectively we track tokens and not merely image
regions. In our case, tokens are being considered the
coherent clusters of motion vectors lying on the
featured points of Omega.
Let
be the set of interest points
detected in image
at time . For a particular
interest point
in image
, we can estimate its new
position in image
by computing the correlation
of the neighbourhood of
in
. We use ADC
(Agarwal & Sklansky 1992; Quek 1994; 1995) to
perform the correlation. Hence the is given by
(4):
,
,
,
;
(4)
where
,
, 21 is the size of the
correlation template, and
,
define the maximal
expected and displacements of
at
respectively.
We define the Vector Coherence Map () at
to be (5):
∑
∑
(5)
where 0
1 is some weighting function
of the contribution of the
of point
on the
vector at
.
By manipulating
, we can enforce a
variety of spatial coherence constraints on the vector
field. Hence the implements a voting scheme
by which neighbourhood point correlations affect
the vector
at point
. We can convert this into a
‘likelihood-map’ for
by normalizing it, subject to
a noise threshold
given by (6):
|
|
(6)
where
∞
|
|
therefore maps the likelihood of terminal
points for vectors originating from
due to
neighbourhood point correlations.
Due to need a real time tracking process, we used
a dynamic method to calculate the. In a way that
instead of computing the for each point
, we
once compute the array for the featured points of
Ω
and then extract the vector of each individual
. With employing of this dynamic technique, the
proposed VCM tracking approach has time cost less
than half of the original VCM.
2.6 Crowd Estimation
The number of people in the scene doesn’t increase
or decrease suddenly, so in order not to lose
information of the previous scene as changing from
the solitude state to the crowded one and vice versa
we need to apply this process gradually. But the
question is how someone can detect the time to
change between these two states. In the proposed
method, we divided the whole area of tracking into
multiple horizontal stripes, in a way that in each
stripe only one person can fit within the strip’s
width. In addition, in the scene a fast and reliable
algorithm estimates the population in each strip
which is between 0 and 1 and it’s called the crowd
coefficient. In order to obtain this coefficient, we
employ the proposed method in (Kong, Gray and
Tao, 2006) which utilizes two different features. The
features obtained from the foreground map and the
ones achieved differently from the edge orientation
map.
The proposed method uses the foreground map in
order to find the blob size and then establish a blob
size histogram as given by (7):
∑
|1 (7)
where
and B(i) denote the size and count for
the th bin, and S(k) is the size of foreground blob k.
The edge orientation map is used to create
;
an edge orientation histogram which sums the
number of pixels at each 22.5 degrees interval. Since
(a) (b)
Figure 8: Samples of changing from the solitude situation
to the crowd one.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
124
the number of vertical edges in the scene is strongly
correlated with the number of pedestrians present,
the first and the last bin are the peaks. After
extracting features and obtains the histograms, we
use PCA algorithm which is more efficient and
decrease the number of misclassification. In order to
train the PCA, we normalize the size of each bin by
dividing it to the number of pixels in the image to
obtain more distinguishable spaces. Therefore the
crowd coefficient is given by (8):
max
, (8)
where
,
is the feature vector
and
is the coefficients vector of th trained
space.
With inspecting the entering strip of the
scene, we can detect the time to change between the
solitude state and the crowd one. And also, with the
help of parameters related to size of body, we can
calculate the speed ratio of the population. Based on
the statistical analysis, the speed ratio is in relation
with crowd coefficient. In a way that the more the
population is, the less the speed ratio will be.
In this method, we define the track area and
the crowd area in the scene which in solitude
situations are defined dynamically and complement
each other, so that sum of these two areas is always
equals to the whole scene. Assume it’s a solitude
situation and it’s changing to the crowd state now.
We start to expand the crowd area in proportion to
the speed ratio, so that this region grows as the
people move as shown in Fig. 8. In the mean time,
we check the entering strip continuously and
whenever the crow coefficient decrease enough; the
track region starts to spread out. When the exiting
strip is a part of the crowd region, in order to count
people we operate based on the coefficient of the
exiting strip and the speed ration by the given
equation (9):
1
/ (9)
where , are based on the environmental
conditions which control the output result.
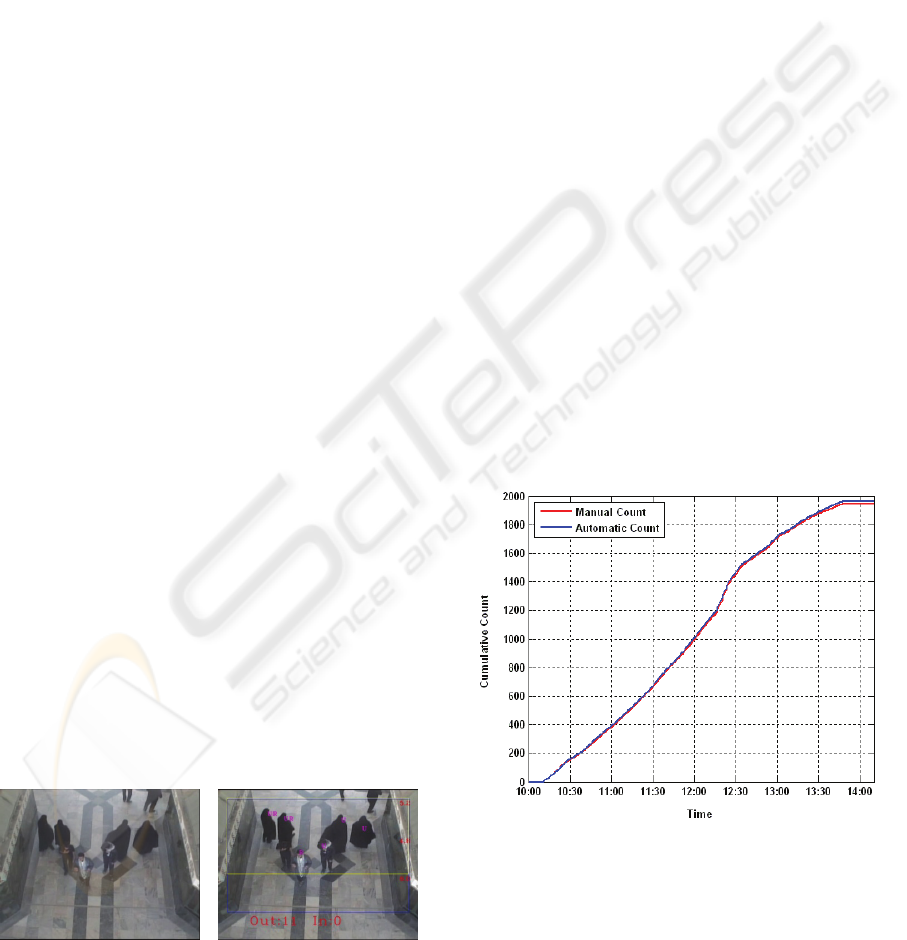
Figure 9: A snapshot of the captured image and the result
of the algorithm.
And on the other hand, when the exiting strip is a
part of the solitude region, the counting method is as
described before.
3 EXPERIMENTAL RESULTS
We evaluate our algorithm quantitatively by
experimenting on one of the biggest Islamic holy
places frames with more than 70 gates and over 3
million people incoming per month. The gates have
outdoor situation such as both heavy and light
shadows, cloudy and rainy weather, and etc. The
scene has been captured with a CCD camera at a
frame rate of approximately 13 fps at 640 x 480
pixels. (Fig. 9)
Fig. 10 shows the evaluation of counting results
for a one hour period on a day between 10:10 a. m.
and 2:10 p.m. The accumulated count demonstrates
that the automatic count is overestimated.
However, the limited time domain error cannot
be referable and does not provide meaningful results
for larger time domains. Fig. 11, shows the relative
error percent over times which provide a more
meaningful way for analyzing error.
It can be inferred that, the relative error can be
decreased to 2% for a counting interval of 1 hour
and 1% after 2 hours. The accuracy of automatic
Counting is really noticeable and is up to 99% which
is displayed in Fig. 11.
Figure 10: Accumulated Counts.
A REAL-TIME HYBRID METHOD FOR PEOPLE COUNTING SYSTEM IN A MULTI-STATE ENVIRONMENT
125
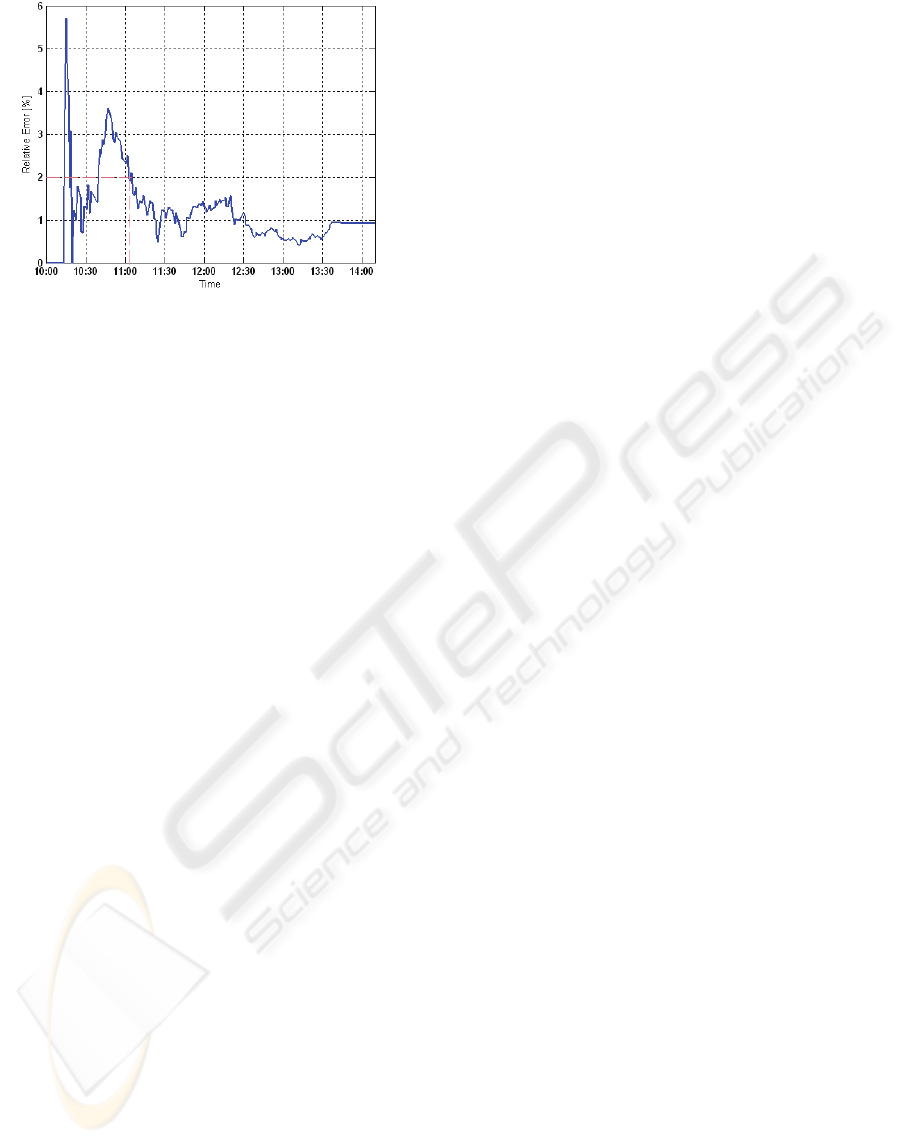
Figure 11: Relative Error.
4 CONCLUSIONS
In this paper, we have a new approach for
simultaneously detecting and tracking pedestrian in
a crowded scene; the gateways of a sacred place
acquired from a stationary camera. Our contribution
to this work mainly includes a dynamic size mask
which is being employed to remove the undesirable
background regions that are labelled as foreground
by the Gaussian Mixture Models, the PCA based
algorithm which is utilized to detect the head shape
objects, the Dynamic-VCM in order to track the
objects in real time manner and finally using
statistical features and PCA to estimate the
population in crowded scenes. The experimental
results on real-life data show the robustness and
accuracy of our method.
This novel approach could be extended in
following fields. 1) We are interested in extend the
system to detect and track other classes of objects
(e.g., cars). It can be enabled by reconstructing the
state space of PCA. 2) We are determined to
improve our system in a way that it will be enable to
switch between the detecting and tracking and the
crowd estimation method in case of overcrowded
states.
ACKNOWLEDGEMENTS
This work was supported by Khorasan Science and
Technology Park (KSTP) and the Dotis Research
and Development Inc.
REFERENCES
Tabb, K.a.D., Neil and Adams, Rod and George, Stella,
2004. Detecting, Tracking & Classifying Human
Movement using Active Contour Models and Neural
Networks. in Tabb2004.
Koschan, A., S.K.K., Paik, J.K., Abidi, B., Abidi, M.,
2002. Video Object Tracking Based On Extended
Active Shape Models With Color Information. In 1st
European Conf. Color in Graphics, Imaging, Vision.
University of Poitiers.
Viola, P., Jones, M.,Snow, D., 2003. Detecting pedestrians
using patterns of motion and appearance. In Proc. 9th
Int. Conf.Computer Vision, pages 734–741, 2003.
Monteiro, G., Peixoto, P., Nunes, U., 2006. Vision-based
Pedestrian Detection using Haar-Like features. In
Robotica 2006 - Scientific meeting of the 6th Robotics
Portuguese Festival, Portugal
Zhao, T., Nevatia, R., Fengjun Lv, 2001. Segmentation
and tracking of multiple humans in complex
situations. In CVPR2001.
Masoud, O., Papanikolopoulos, N.P., 2001. A novel
method for tracking and counting pedestrians in real-
time using a single camera. In IEEE Trans. on
Vehicular Technology, vol. 50, no. 5, pp. 1267-1278
Kong, D., Gray, D., Tao, H., 2006. A Viewpoint Invariant
Approach for Crowd Counting. In ICPR'06, pp.1187-
1190, 18th International Conference on Pattern
Recognition.
Rahmalan, H., Nixon, M. S. and Carter, J. N. 2006. On
Crowd Density Estimation for Surveillance. In
International Conference on Crime Detection and
Prevention, London UK.
Quek, R.B.a.F., 2006. Accurate Tracking by Vector
Coherence Mapping and Vector-Centroid Fusion. In
ICPR'06, International Journal Of Computer Vision,
2002.Recognition.
Stauffer, C., Grimson, W, 1999. Adaptive Background
Mixture Models for Real-Time Tracking. In CVPR'99
IEEE Computer Society Conference on Computer
Vision and Pattern Recognition
Kong, D., Gray, D., Tao, H., 2006. A Viewpoint Invariant
Approach for Crowd Counting. In ICPR'06, The 18th
International Conference on Pattern Recognition
Villamizar, M., Sanfeliu, A., Ansrade-Cetto, J., 2009.
Local Boosted Features For Pedestrian Detectiobn. In
Pattern Recognition and Image Analysis, Spriner
Berlin / Heidelberg
Eng Aik, L., Zainuddin, Z.,2009. Real-Time People
Counting System using Curve Analysis Method. In
The International Journal of Computer and Electrical
Engineering.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
126
