
MAP EXPLORATION USING A LINE-BASED FORMATION OF
MOBILE ROBOTS
Bart Wyns, Jens Boeykens and Luc Boullart
Dept. of Electrical Energy, Systems and Automation, Ghent University, Technologiepark 913, Zwijnaarde, Belgium
Keywords:
Map exploration, Formation strategies, Mobile robots, Concave obstacles.
Abstract:
Exploration of an unknown environment is a well-studied problem for single robot systems. However, using
just a single robot limits the speed in which a map can be fully explored. Using a multi-robot approach,
a noticeable performance gain can be achieved. In this article a line-based formation strategy to explore a
static area is introduced, without making any assumptions about the shape of the obstacles within. A software
simulator including this line-based formation strategy was built to evaluate performance in different environ-
ments. Results show that the robot formation can easily get around both convex and concave obstacles whilst
constructing a map that is both complete and correct.
1 INTRODUCTION
Map exploration is one of the most widespread tasks
performed by mobile robots, due to many practical
applications. Mine field clearance, planetary explo-
ration and rescue missions are just three out of many
examples. It is therefore considered as one of the fun-
damental problems in mobile robotics. Since the po-
tential of a single robot is quite restricted, an increas-
ing amount of research is focused on multi-robot ex-
ploration (A. U. Irturk, 2006; K. Easton and J. Bur-
dick, 2005; W. Burgard et al., 2005; W. Kerr et al.,
2005; S. Weihua et al., 2006; Simmons et al., 2000).
An increased performance, distributed sensing and
higher fault tolerance are evident motives. However,
moving from one robot towards a multi-robot setup
also strongly increases complexity.
Exploring unknown territory can be categorized in
complete coverage (I. Rekleitis et al., 2004) and no
complete coverage (as in (Rogge and Aeyels, 2007)
for example). The latter use a zigzag formation with
two leader robots. Whenever an obstacle is found, the
formation beaks up in two groups, always between the
middle robots. The major drawback of their strategy
is the lack of support for concave obstacles. Further-
more recursive splitting is bounded by the number of
available robots, which in turn limits the density of
the obstacles spread across the area. Coordinating the
robots with a formation obviously implies establish-
ing and maintaining that formation. In (J. Fredslund
and M. J. Mataric, 2002) this is achieved with local
sensing and minimal communication. Multiple robots
almost always need to communicate in order to avoid
collisions and minimize repeat coverage. It is often
assumed that communication is limited (W. Burgard
et al., 2005), sometimes with the restriction of line-
of-sight (I. Rekleitis et al., 2004; J. Ota, 2006). In this
article we shall not adopt this assumption, considering
it as future work. If communication is indeed limited,
a message can always be passed on from one robot
towards another until its destination is reached, just
as if the robots were forming a chain. A more com-
plete and general overview of exploration and cover-
age strategies with multiple robots is found in (A. U.
Irturk, 2006; H. Choset, 2001).
The main goal of this article is to design a strategy
which guarantees correct exploration with multiple
robots, resulting in a complete map of the area. We
only require free space to be covered by the robot’s
sensors, not by the robot itself. A formation is used to
coordinate the robots which explore a room one slice
at a time. Furthermore we don’t make any assump-
tions about the shape of the obstacles in the environ-
ment, unlike many related work. Both concave and
241
Wyns B., Boeykens J. and Boullart L. (2010).
MAP EXPLORATION USING A LINE-BASED FORMATION OF MOBILE ROBOTS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 241-244
DOI: 10.5220/0002591002410244
Copyright
c
SciTePress

convex obstacles are thus allowed. At the same time
we try to obtain maximum benefit from the number of
robots that are available for exploration.
The remainder of this paper is organized as fol-
lows. Firstly, we describe the exploration strategy for
a general type of robot using a theoretical approach
in section 2. More details about the implementation
within the simulator can be found in section 3. Fi-
nally, we discuss the results in section 4, followed by
some conclusions in section 5.
2 ALGORITHM DESCRIPTION
In our approach, robots are ordered on a straight line.
An important advantage of a straight line is its width,
which is the largest of all possible formations. In this
way a large part of the map can be explored at once. In
addition it’s a very simple formation, which allows for
easy establishment via a chain of friendships (J. Fred-
slund and M. J. Mataric, 2002). As for the exploration
itself we use a complete sensor coverage approach as
in (Rogge and Aeyels, 2007).
Like many previous work, the robots explore the
environment slice per slice. The deliberative ap-
proach differs a lot from traditional algorithms (such
as behavior-based systems) as we don’t simply split
the robot team in two groups, each wall-following a
different side of the obstacles. Instead, two separate
phases are executed when obstacles are found. If one
robots detects an obstacle, this is communicated to
the team and all robots stop. Next, they start the first
phase in which all new obstacles are added to the map
(fully explored via wall-following). This is called the
exploration phase and is illustrated in figure 1. When
no new obstacles can be found this phase is termi-
nated and the robots initiate the second phase. In this
phase the robots move round the obstacles until each
robot has passed it and the formation is regrouped. If
during the second phase a new obstacle is found or an
obstacle is preventing the formation to regroup, the
robots go back to the exploration phase. This process
continues until the formation is reestablished and no
obstacles are blocking their path. The formation can
then explore the remainder of the slice.
Once no new obstacles can be found near the
robots, they start moving round each obstacle block-
ing their path. Since each of those obstacles is already
added to the map, they can locate their correct goal
position. Each goal position is chosen so that all ar-
eas are explored, in particular the cavities of concave
obstacles. To do so an imaginary line is drawn, start-
ing from the robot’s position and going through the
obstacle blocking its path. As soon as enough free
space is found, a goal point is located.
3 EXPERIMENTAL SETUP
We implemented our strategy on the EyeBot-platform
within a simulator called EyeSim (A. Koestler and T.
Br
¨
aunl, 2004). In addition we built a generic test suite
providing easy testing, configuration and evaluation.
The setup comprises several robots and one computer
acting as a server. The robots are fully autonomous
and can communicate both directly with each other
and with the server (wireless).
3.1 EyeBotServer
The server has several tasks. Firstly, it is responsi-
ble for the configuration of each experiment. It reads
in a configuration-file containing parameters like the
shape of the formation, driving speed, width of slices,
etc. These parameters are sent to all robots which
means configuration is centralized and the need to re-
compile the robots program is eliminated. It also al-
lows for easy extending the suite with other forma-
tions and strategies resulting in a very generic plat-
form. The second task of the server originates from
the exploration of an environment. It is responsible
for storing the global map of the area, constructed
by the robots. We do this to adjust for the limited
memory capacity of the robots and to provide a safer
storage of the map. Since a computer has a large
amount of memory, we use a grid to model the envi-
ronment. A grid makes it easy to calculate goal points
and the shortest route towards them. The last task of
the server comprises exporting the results of the ex-
ploration. A visualization of the map via a PNG im-
age is generated from the grid structure and stored on
disk.
3.2 EyeXplore
EyeXplore is the main program run by each EyeBot
and is an implementation of the deliberative strat-
egy described in section 2. We emphasize that the
robots running this program are fully autonomous in
the sense that they don’t get instructions from the
server. For them the server acts as an extended mem-
ory in which the map can be stored. During explo-
ration, the robots are responsible for determining the
edges of obstacles which are then send to the server.
The robots don’t store these edges permanently in lo-
cal memory in order to save space. There is thus no
distributed map among the robots. In order to explore
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
242
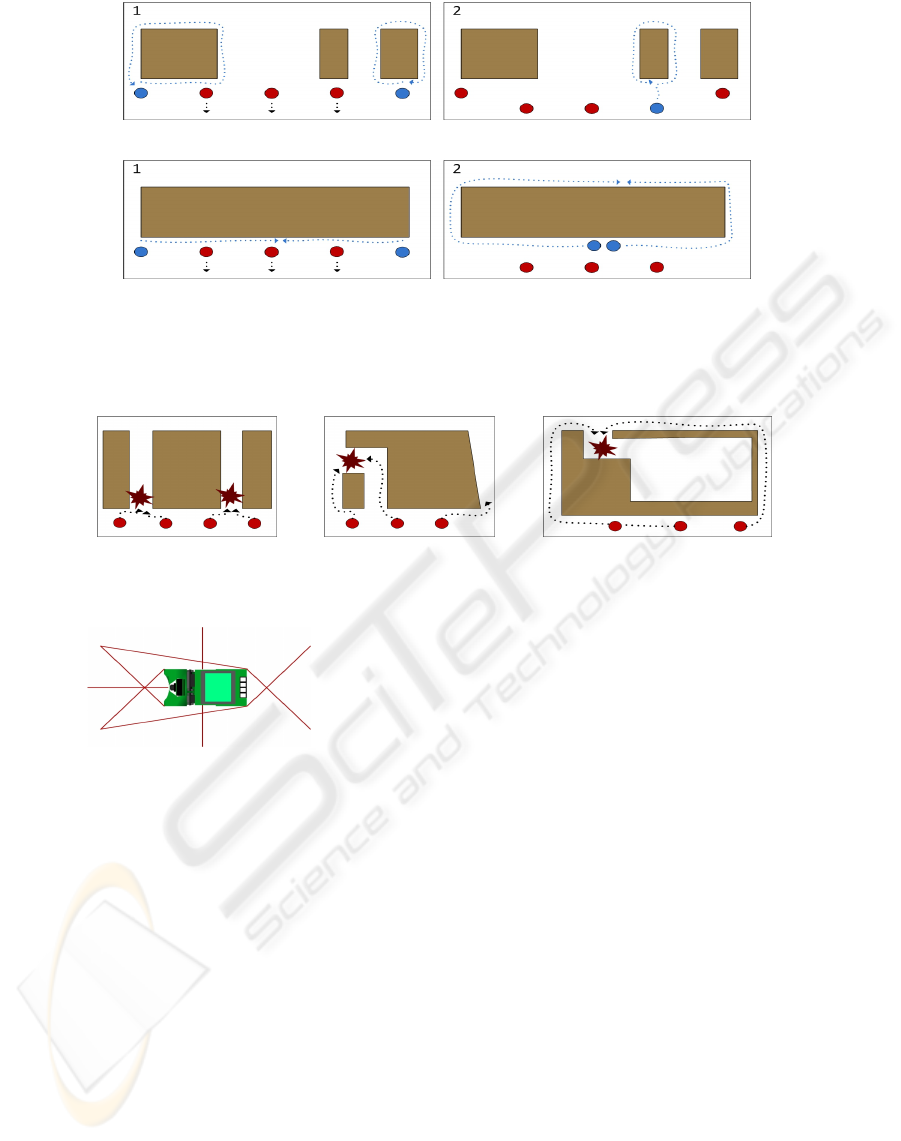
(a) Exploring robots in front of different obstacles.
(b) In case of larger obstacles, the two exploring robots might explore the same obstacle.
When they actually meet each other during wall-following, they know there is only one
obstacle. Both robots then only explore half of the obstacle’s border to gain speed.
Figure 1: Illustration of exploration phase. Two explorer robots are selected and perform a wall-following.
(a) (b) (c)
Figure 2: Robot collisions during wall-following to reach goal-point.
Figure 3: PSD sensors used during the experiments.
the edges of obstacles and to avoid collisions, we use
distance sensors as shown in figure 3.
4 RESULTS
In this section we discuss some results of the delib-
erative strategy. We examine the exploration time for
five different environments (shown in figure 4). Due
to page restrictions only a single map is shown.
In order to examine the influence of the number
of robots on the exploration time, each environment
was explored five times. For each test the number of
robots was increased with one, starting from a sin-
gle robot until a maximum of five robots. This gives
us five durations in total for each environment (third
column of figure 4). From the results it is clear that
introducing a second robot always leads to a faster ex-
ploration with respect to a single robot. This is caused
by a higher parallelization and a bisection of the num-
ber of slices required to explore the area. Bringing
in even more robots doesn’t always have the same
positive effect. This observation has several causes.
Firstly, remark that the extra decrease in the number
of required slices declines as the number of robots in-
creases. Another cause is that within our strategy, at
most two robots are exploring new obstacles at the
same time. The other robots are stalled during that
time, which can lead to relatively long delays depend-
ing on the obstacles within the environment. In figure
4 the large S-shaped obstacle is explored by all robots
when the formation contains only two robots. Adding
a third robot causes this obstacle to be explored by
just one robot, introducing delays for the remaining
two robots. This explains the large increase of explo-
ration time. Also note that the obstacles in figure 4 are
placed such that the formation cannot be maintained
as soon as there are more than two robots, since there
is not enough space to form a line. This also means
the robots will hamper each other more often which
has a negative effect on exploration time.
We also examined the influence of the width of the
formation and thus the width of the slices. For this
purpose each environment was explored five times
once more. Now each test is done by a forma-
tion comprising a constant number of robots, namely
MAP EXPLORATION USING A LINE-BASED FORMATION OF MOBILE ROBOTS
243

Figure 4: Results for a difficult map (4 other maps are not shown due to page restrictions). Four columns are shown for each
environment. From left to right: the simulator, the resulting PNG image of the map, exploration time with increasing number
of robots and finally with an increasing slice width.
three. Instead, we vary the horizontal distance be-
tween each two neighboring robots standing in a line
formation. The smallest distance is 33 cm and this
is increased with 10 cm in each step, corresponding
to the width of a single EyeBot. The largest distance
between two robots considered here is thus 73 cm.
The exploration times for each environment are
shown in the fourth column in figure 4. Note that
the graphs now show a more clear descending ten-
dency and exploration times are lower than when we
increased the number of robots. This is caused by
the decreasing number of slices as we increase slice
width. Fewer delays are introduced as well because
for most of the test-environments two robots were ex-
ploring at the same time, implying more paralleliza-
tion. The robots also don’t hinder each other as often
as with a formation comprising four or five robots.
Therefore we can assume it is better to first increase
slice width in order to lower exploration times. Of
course the range of the sensors and communication
hardware will limit the maximum width and eventu-
ally additional robots should be used as well.
5 CONCLUSIONS AND FUTURE
WORK
We developed a deliberative strategy to explore an un-
known environment with a formation of robots. Both
concave and convex obstacles are supported, which is
the primary innovation of our research. Moreover, the
strategy is very scalable as it can be applied from a
single robot to any number of robots (as long there
is enough space in the environment). The results
from our tests are very promising, yet further research
is still needed to exploit the number of robots even
more.
REFERENCES
A. Koestler and T. Br
¨
aunl (2004). Mobile Robot Simulation
with Realistic Error Models. International Conference
on Autonomous Robots and Agents, 6:46–51.
A. U. Irturk (2006). Distributed Multi-robot Coordination
For Area Exploration and Mapping.
H. Choset (2001). Coverage for robotics - A survey of re-
cent results. Annals of mathematics and artificial in-
telligence, 31(1-4):113–126.
I. Rekleitis, V. Lee-Shue, Ai Peng New, and H. Choset
(2004). Limited communication, multi-robot team
based coverage. Proc. 2004 IEEE International Con-
ference on Robotics and Automation, 1-5:3462–3468.
J. Fredslund and M. J. Mataric (2002). A General Algorithm
for Robot Formations Using Local Sensing and Min-
imal Communication. IEEE transactions on robotics
and automation, 18(5):837–846.
J. Ota (2006). Multi-agent robot systems as distributed au-
tonomous systems. Advanced engineering informat-
ics, 20(1):59–70.
K. Easton and J. Burdick (2005). A coverage algorithm for
multi-robot boundary inspection. IEEE International
Conference on Robotics and Automation (ICRA), 1-
4:727–734.
Rogge, J. and Aeyels, D. (2007). A novel strategy for explo-
ration with multiple robots. Icinco 2007: proceedings
of the fourth international conference on informatics
in control, automation and robotics, vol ra-1- robotics
and automation, 1:76–83.
S. Weihua, Y. Qingyan, T. Jindong, and X. Ning
(2006). Distributed multi-robot coordination in area
exploration. Robotics and autonomous systems,
54(12):945–955.
Simmons, R., Apfelbaum, D., Burgard, W., Fox, D., Moors,
M., Thrun, S., and Younes, H. (2000). Coordina-
tion for multi-robot exploration and mapping. Pro-
ceedings Seventeenth National Conference on Artifi-
cial Intelligence (AAAI-2000). Twelfth Innovative Ap-
plications of Artificial Intelligence Conference (IAAI-
2000), pages 852–8.
W. Burgard, M. Moors, C. Stachniss, and F. Schneider
(2005). Coordinated Multi-robot exploration. IEEE
transactions on robotics, 21(3):376–386.
W. Kerr, D. Spears, W. Spears, and D. Thayer (2005). Two
formal gas models for multi-agent sweeping and ob-
stacle avoidance. Formal Approaches to Agent-Based
Systems, 3228:111–130.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
244
