
DETECTING LOCALISED MUSCLE FATIGUE
DURING ISOMETRIC CONTRACTION
USING GENETIC PROGRAMMING
Ahmed Kattan, Mohammed Al-Mulla, Francisco Sepulveda and Riccardo Poli
School of Computer Science and Electronic Engineering, University of Essex, Wivenhoe, U.K.
Keywords: Muscles fatigue, Transition-to-Fatigue, Genetic Programming, EMG, K-means.
Abstract: We propose the use of Genetic Programming (GP) to generate new features to predict localised muscles
fatigue from pre-filtered surface EMG signals. In a training phase, GP evolves programs with multiple
components. One component analyses statistical features extracted from EMG to divide the signals into
blocks. The blocks’ labels are decided based on the number of zero crossings. These blocks are then
projected onto a two-dimensional Euclidean space via two further (evolved) program components. K-means
clustering is applied to group similar data blocks. Each cluster is then labelled into one of three types
(Fatigue, Transition-to-Fatigue and Non-Fatigue) according to the dominant label among its members.
Once a program is evolved that achieves good classification, it can be used on unseen signals without
requiring any further evolution. During normal operation the data are again divided into blocks by the first
component of the program. The blocks are again projected onto a two-dimensional Euclidean space by the
two other components of the program. Finally blocks are labelled according to the k-nearest neighbours.
The system alerts the user of possible approaching fatigue once it detects a Transition-to-Fatigue. In
experimentation with the proposed technique, the system provides very encouraging results.
1 INTRODUCTION
The electro-myo-gram (EMG) is a test used to record
the electrical activity of muscles (Lieber 2002).
Muscles produce an electrical potential that is non-
linearly related to the amount of force produced in a
muscle. Analyzing these signals and associating
them with muscle state has been an area of active
research in the biomedical community for many
decades. For example, Sony (Dubost & Tanaka
September 2002) has presented a hardware system
for musical applications that is controlled by EMG
signals. The system is able to recognise different
gestures and associate them with particular
commands to the machine. Detecting muscle fatigue,
however, is still an extremely challenging task.
Atieh et al. (Atieh et al. December 2005) tried to
design more comfortable car seats by trying to
identify and classify EMG signals using data mining
techniques and statistical analysis to determine
localised muscle fatigue. Artificial neural networks
have been used to detect muscle activity by Moshoua
et al. (Moshoua, Hostensa & Papaioanno July 2005).
In that work, wavelet coefficients were proposed as
features for identifying muscle fatigue. Song and
collaborators (Song, Jung & Zeungnam 2006)
proposed an EMG pattern classifier of muscular
fatigue. The adaptation process of hyperboxes of
fuzzy Min-Max neural networks was shown to
significantly improve recognition performance.
In this paper we investigate the idea of
predicting localised muscle fatigue by identifying a
transition state which resides between the non-
fatigue and the fatigue stages within the EMG signal.
Genetic Programming (GP) has been used to
automate this process (Poli, Langdon & McPhee
2008).
As we will illustrate in the following sections, the
proposed approach was able to give an early warning
before the onset of fatigue in most of the
experimental cases we looked at. Therefore, this
approach shows some potential for application
domains such as ergonomics, sports physiology, and
physiotherapy.
292
Kattan A., Al-Mulla M., Sepulveda F. and Poli R. (2009).
DETECTING LOCALISED MUSCLE FATIGUE DURING ISOMETRIC CONTRACTION USING GENETIC PROGRAMMING.
In Proceedings of the International Joint Conference on Computational Intelligence, pages 292-295
DOI: 10.5220/0002315402920295
Copyright
c
SciTePress

2 THE METHODOLOGY
We try to spot regularities within the EMG data and
to associate them to one of three classes: i) Non-
Fatigue, ii) Transition-to-Fatigue, and iii) Fatigue.
Each class indicates the state of the muscle at a
particulate time.
The system works in two main stages: i)
Training, where the system learns to match different
signals’ characteristics with different classes, and ii)
Testing, where the system applies what it has learnt
to classify unseen data.
In the training phase, the system processes
filtered EMG signals and performs two major
functions: i) Segmentation of the signals based on
their statistical features, and ii) Classification of the
identified segments based on their types (i.e., Non-
Fatigue, Transition-to-Fatigue, or Fatigue). For these
tasks, GP has been supplied with a language that
allows it to extract statistical features from EMG.
Table 1 reports the primitive set of the system.
Table 1: Primitive Set.
Primitive Set Input
Median, Mean, Avg_dev, Std,
Variance, Signal size, Skew,
Kurtosis, Entropy, Zero crossings
Vector of real
number
+, -, /, *, Sin, Cos, Sqrt
Real Number
The system starts by randomly initialising a
population of individuals using the ramped half-and-
half method (Poli, Langdon & McPhee 2008). Each
individual has a multi-tree representation. In
particular, each individual is composed of one
splitter tree, and two feature-extraction trees. (Multi-
tree representations of this kind are common in GP,
and have been used, for example, for data
classification in (Estevez & Pablo 25-28 September
2007) ).
2.1 Splitter Tree
The main job of splitter trees is to split the EMG
signals in the training set into meaningful segments,
where by “meaningful” we mean that each segment
indicates the state of a muscle at a particular time.
The system moves a sliding window of size L
over the given EMG signal with steps of S samples.
At each step the splitter tree is evaluated. This
corresponds to applying a function, f
splitter
, to the data
within the window. The output of the program is a
single number, λ, which is an abstract representation
of the features of the signal in the window. The
system splits the signal at a particular position if the
difference between the λ’s in two consecutive
windows is more than a predefined threshold θ. The
threshold θ has been selected arbitrarily (θ = 10).
Once the data have been divided into blocks, the
system labels each block with one of the three
identified classes based on the number of zero
crossings in the raw EMG signal, i.e., the number of
times the signal crosses the zero-amplitude line
(details are in section 2.3). A good splitter tree
should be able to place block boundaries at the
transitions between three types of muscle states: i)
Non-Fatigue, ii) Transition-to-Fatigue, and iii)
Fatigue.
Preliminary tests showed that an average EMG
signal in our set has 50% of non-fatigue, 10%
transition-to-fatigue and the remaining 40% is
fatigue. Thus, the splitter tree can be considered to
be good if it divides the signal into the three types of
blocks with both meaningful proportions (i.e.,
fatigue > non-fatigue > transition-to-fatigue) and
meaningful sequence (non-fatigue should appear
before transition-to-fatigue and fatigue). Splitter
trees that violate these conditions are discouraged by
penalizing their fitness value (see section 2.4).
2.2 Feature-Extraction Tree
The main job of the two feature-extraction trees in
our GP representation is to extract features using the
primitives in Table 1 from the blocks identified by
the splitter tree and to project them onto a two
dimensional Euclidian space, where their
classification can later take place.
We used a standard pattern classification
approach on the outputs produced by the two
feature-extraction trees to discover regularities in the
training signals. In principle, any classification
method can be used with our approach. Here, we
decided to use K-means clustering to organise blocks
(as represented by their two composite features) into
groups. With this algorithm, objects within a cluster
are similar to each other but dissimilar from objects
in other clusters. The advantage with this approach is
that the experimenter doesn’t need to label the
training set. Also, the approach does not impose any
constrains on the shape of the clusters. Once the
training set is clustered, we can use the clusters
found by K-means to perform classification of
unseen data.
In the testing phase, unseen data go through the
three components of the evolved solution. Blocks are
produced by the splitter tree and then projected onto
a two-dimensional Euclidean space by the two
DETECTING LOCALISED MUSCLE FATIGUE DURING ISOMETRIC CONTRACTION USING GENETIC
PROGRAMMING
293

feature-extraction trees. Then, they are classified
based on the majority class labels of their k-nearest
neighbours. We use a weighted majority voting,
where each nearest neighbour is weighted based on
its distance from the newly projected data point.
More specifically the weight is w = 1 / distance (x
i
,
z
i
,), where x
i
is the nearest neighbour and z
i
is the
newly projected data point.
Once the system detects a transition-to-fatigue, it
alerts the user about a possible approaching fatigue.
2.3 Labelling the Training Set
The approach described above is based on an
unsupervised learning model. In our case the given
EMG signals in the training set are unlabelled. Here,
we used the zero crossings to recognise the state of
the muscle.
There are several ways to recognise muscle state
from the EMG signal. Some Authors (Mannion et al.
1997), (Finsterer August 2001) argue in favour of
the idea of counting the number of times the
amplitude of the signal crosses the zero line based on
the fact that a more active muscle will generate more
action potentials, which overall causes more zero
crossings in the signal. However, at the onset of
fatigue the zero crossings will drop drastically due to
the reduced conduction of electrical current in the
muscle.
Hence, our system decides the labels of the
blocks found by the splitter tree in the training set
based on the number of zero crossings of the EMG
signal. Before the system starts the evolution
process, it scans the training set signals and divides
them into blocks of predefined length. The number
of zero crossings from each block is stored in a
sorted vector that does not allow duplicate elements.
Then, the system divides this vector into three parts.
The lower 40% is taken to represent fatigue, the
middle 10% represents transition-to-fatigue, and the
higher 50% is non-fatigue. These three propositions
(10%, 40% and 50%) were selected based on the
preliminary tests with the EMG signals (as we
mentioned in Section 2.1). The numbers of zero-
crossings of the blocks in these three groups are then
used to identify three intervals. Later, the output of
the splitter trees is classified into one of these three
groups based on the interval in which the number of
zero crossings in it falls.
Despite the simplicity of this labelling technique,
the labels that it assigned to the output of the splitter
trees were consistent and were judged by an expert
to indicate the muscle state in most of the cases.
However, noise in some parts of the EMG signal can
result in wrong labels. Sometimes when the EMG
signal is noisy, the labels tend to not be in a
meaningful sequence and do not reflect the actual
state of the muscle. To solve this problem, we
carefully selected a training set with the least noisy
signals. Also, each fragment of signal in the training
set was manually screened to ensure that it had the
correct label.
2.4 Fitness Measurement
The calculation of the fitness is divided into two
parts. Each part contributes with equal weight to the
total fitness. The fitness contribution of the splitter
tree is measured as follows.
Splitter tree fitness is measured by assessing the
amount of help provided to the feature extraction
trees in projecting the segments into tightly grouped
and well separated clusters, plus a penalty if
required. More formally, the quality of the splitter
tree can be expressed as follows. Let f
Feature-extraction
be
the fitness of the feature-extraction trees, and µ a
penalty values:
f
Splitter
= f
feature-extraction
+ µ.
where µ is added if, for example, the splitter does
not respect the non-fatigue/transition-to-
fatigue/fatigue sequence. The value of µ is fixed.
The second part of the individual’s fitness is the
classification accuracy (with K-means) provided by
the feature-extraction trees. After performing the
clustering using K-means we evaluate the accuracy
of the clustering by measuring cluster homogeneity
and separation. The homogeneity of the clusters is
calculated as follows.
The system counts the members of each cluster.
Note that, each data point in the cluster represents a
block of the signal. Since we already know (from the
previous step) the label for each block, we label the
clusters according to the dominant members. The
fitness function rates the homogeneity of clusters in
terms of the proportion of data points – blocks – that
are labelled as the muscle’s state that labels the
cluster. The system prevents the labelling of
different clusters with the same label even in cases
where the proportions in two or more clusters are
equal.
The Davis Bouldin Index (DBI) (Bezdek & Pal
Jun 1998) was used to measure clusters separation.
DBI is a measure of the nearness of the clusters’
members to their centroids and the distance between
clusters’ centroids. A small DBI index indicates well
separated and grouped clusters. Therefore, we add
the negation of the DBI index to the total feature
extraction fitness in order to encourage evolution to
IJCCI 2009 - International Joint Conference on Computational Intelligence
294

separate clusters (i.e., minimise the DBI). It should
be noted that the DBI here is treated as a penalty
value, the lower the DBI the lower penalty applied to
the fitness.
Thus, the fitness of feature extraction trees is as
follows.Let H be a function that calculates the
homogeneity of a cluster and let CL
i
be the i
th
cluster.
Furthermore, let K be the total number of clusters
(three clusters in our case: fatigue, transition-fatigue
and non-fatigue). Then,
f
Homogeneity
=
DBI
K
)H(CL
K
=i
i
−
∑
1
The total fitness of the individual is:
f = (f
feature-extraction
/2) + (f
Splitter
/2)
3 EXPERIMENTS
Experiments have been conducted in order to
investigate the performance of the proposed
technique. The aim of these experiments is to
measure the prediction accuracy with different EMG
signals.
3.1 EMG Recording
The data was collected from three healthy subjects
(aged 23-25, non-smoker, athletic background). The
local ethical committee approved the experiment’s
design. The three participants were willing to reach
physical fatigue state but not psychological fatigue.
Selection criteria were used to minimise the
differences between the subjects, which would
facilitate the analysis and comparison of the
readings. The participants had comparable physical
muscle strength. It was also preferred that the
subjects had an athletic background with a similar
muscle mass, which would facilitate the correlation
of the results. It was also important that the
volunteers were non-smokers, as it is known that
smoking affects physical abilities, which again could
lead to inaccurate readings of muscle fatigue in a
participant who smokes.
The participants were seated on a chair. Each
participant was asked to hold a weight training bar -
dumbbell – until their muscle fatigued. The steps in
our test bed set up are the following: 1) A bipolar
pair of electrodes was placed on the right arm's
biceps muscle for EMG recording. 2) The force
gauge was perpendicular to the dumbbell to ensure
that the force gauge was taking the correct reading.
3) A strap wass handed to participants to enable the
force gauge reading. 4) A protractor was used to
ensure a 90 degree angle of the elbow for the initial
setup. 5) A dumbbell was handed to the participant.
6) A laser was embedded in the dumbbell to give
visual guidance of the elbow angle. 7) The elbow
position was padded, so the participant was
comfortable.
The myoelectric signal was recorded using two
channels; Double Differential (DD) recording
equipment at 1000Hz sampling rate with active
electrodes on the biceps branchii during two
isometric dumbbell exercises, with 30% Maximum
Voluntary Contraction “MVC” and 80% “MVC”
respectively. For each of the three participants 6
trials were carried out, providing 18 trials in total.
3.2 GP Setup
Of the 18 EMG signals (trials) acquired, we used 3
trials for the training set, one trail from each subject.
In this way we hoped we would allow GP to find
common features for the three different participants
and build a general prediction model. The
experiments that are presented here were done using
the following parameters: population of size 100,
maximum number of generations 30, crossover with
probability of 90%, mutation with probability 5%,
reproduction with probability 5%, tournament
selection of size 5 and maximum tree depth of 10.
The performance of our approach has been
measured through 18 independent runs, each of
which trains the system and uses the output of the
training to predict the muscle state of 15 EMG
signals (5 signals for each participant). The aim is to
obtain a good prediction for each participant and a
reasonably general prediction algorithm that
performs well on average for all participants. Each
GP run results in one splitter tree and two feature
extraction trees. Since during offline tests it is
possible to know the actual label for each block by
counting its number of zero crossings, we compared
the GP predictions against the actual labels and
counted the proportion of times this was correct (hit
rate).
Table 2 reports the best achieved hit rate for each
test signal, as well the average hit rate in all runs.
Also, the worst hit rates are presented to show the
algorithm performance in its worst case. Moreover,
standard deviation for each signal is presented to
illustrate the system's robustness. The last row of
Table 2 reports the approximate average processing
time for both training and testing.
DETECTING LOCALISED MUSCLE FATIGUE DURING ISOMETRIC CONTRACTION USING GENETIC
PROGRAMMING
295
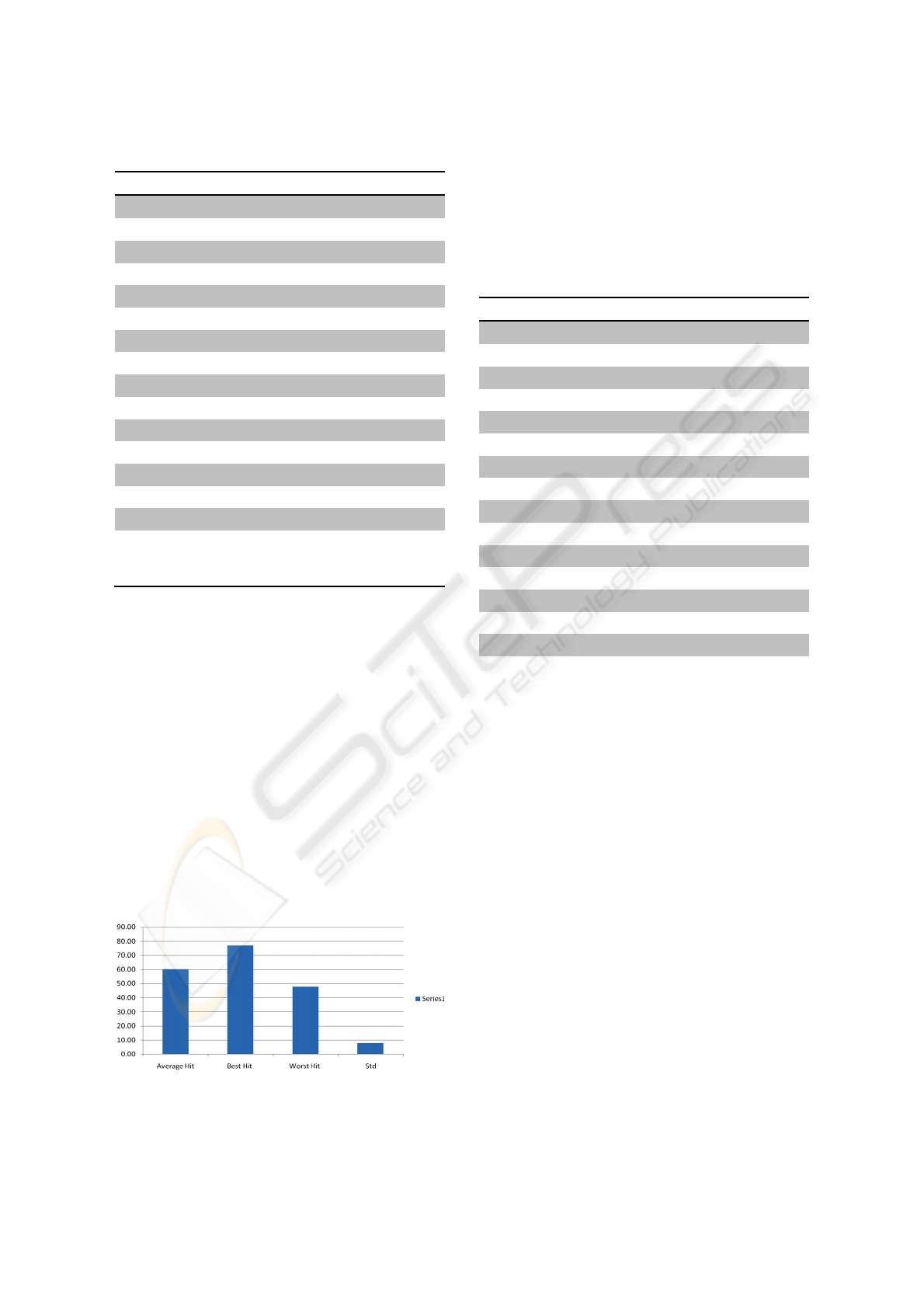
Table 2: Summary of performance of 18 different GP runs.
Signal Avg. Hit Best Hit Worst Hit Std.
A1
60.36% 77.27% 37.84% 8.99
A2
57.54% 77.36% 38.89% 9.03
A3
60.69% 85.71% 39.39% 11.24
A4
62.40% 100% 25.00% 19.31
A5
57.96% 81.82% 9.09% 17.92
B1
56.62% 90% 39.29% 13.10
B2
62.73% 82.35% 41.18% 12.98
B3
41.67% 100% 0.00% 28.58
B4
65.08% 100% 0.00% 23.78
B5
58.24% 100% 25.00% 20.00
C1
67.08% 100% 42.31% 14.73
C2
62.28% 78.79% 43.59% 8.27
C3
66.05% 85.71% 40.00% 11.76
C4
56.75% 100% 0.0% 16.56
C5
65.34% 100% 16.56% 42.84
Average Testing Time
Average Training Time
1 min/test
signal
18 Hours
Figure 1 summarise the runs’ information. We
measured the quality of each run by calculating the
average hit rate for all test signals (test set). This
reflects the accuracy of the evolved programs when
dealing with signals from different participants.
More specifically, the first column in the histogram
in Figure 1 shows the average of the runs’ qualities
(i.e., the average of the averages). The second
column in the figure shows the quality (i.e., average
hit rate for all test signals) of the best evolved
predictor. The third column shows the quality of the
worst evolved predictor. Finally, the last column
shows the average standard deviation for all runs.
The low standard deviation with the reasonable
average prediction accuracy indicates that our
system is likely to produce accurate models within a
few runs.
Figure 1: Summary of 18 runs.
Table 3 reports the performance of the best
evolved predictor as well as the performance of the
worst, signal by signal. It should be noticed that the
achieved results are promising, especially
considering that the system is predicting muscle
fatigue for three different individuals.
Table 3: Best GP test run vs. worst GP test run.
Signal/ results Best run Worst run
A1
66.67% 37.84%
A2
66.66% 53.12%
A3
75.47% 48.91%
A4
25% 50%
A5
66.67% 40%
B1
90% 40.74%
B2
81.25% 65.52%
B3
50% 33.33%
B4
100% 50%
B5
100% 42.86%
C1
100% 42.31%
C2
78.79% 43.84%
C3
75% 56.25%
C4
80% 69.23%
C5
100% 42.857%
4 CONCLUSIONS
Our results are encouraging, in the sense that a good
prediction has been achieved and further significant
improvements could be obtained.
Although, this approach has achieved good
prediction rates (100% in some cases), it suffers
from a major disadvantage. The proposed labeling
mechanism – being based on zero crossings – is not
very reliable
(as described in section 2.3). This is
due to the fact that the number zero crossings is
affected by noise. Thus, the labels of the signal’s
blocks might not be accurate. This has the potential
to hamper or prevent learning in the system. We
avoided this problem altogether by carefully
selecting the least noisy signals for the training set
and suitably preprocessing the signals. Nevertheless,
there remains the possibility that some errors in the
labeling still occur.
There are many directions for us to further
improve the performance of this technique. For
example, a simple extension in the set of statistical
functions available in the primitive set might
IJCCI 2009 - International Joint Conference on Computational Intelligence
296

improve the classification accuracy. Also, the use of
more sophisticated technique to label the EMG
blocks (e.g., fuzzy classification) might improve the
system’s reliability and flexibility.
REFERENCES
Atieh, M, Younes, R, Khalil, M & Akdag, H December
2005, 'Classification of the Car Seats by Detecting the
Muscular Fatigue in the EMG Signal', International
Journal of Computational Cognition.
Bezdek, JC & Pal, NR Jun 1998, 'Some new indexes of
cluster validity', IEEE Transactions on Systems, Man,
and Cybernetics, Part B: Cybernetics, vol 28, no. 3,
pp. 301-315.
Dubost, G & Tanaka, A September 2002, 'A Wireless
NetWork based Biosensor Interface for Music', Proc.
of Intern. Computer Music Conf.
Estevez, NB & Pablo, A 25-28 September 2007, 'Genetic
Programming-Based Clustering Using an Information
Theoretic Fitness Measure', IEEE Congress on
Evolutionary Computation, IEEE Press.
Finsterer, J August 2001, 'EMG-interference pattern
analysis J', Journal of Electromyography and
Kinesiology, vol 11, pp. 231-246(16).
Lieber, RL 2002, Skeletal muscle structure, function &
plasticity: the physiological basis of rehabilitation,
2nd edn, Lippincott Williams & Wilkins.
Mannion, AF, Connolly, B, Wood, K & Dolan, P 1997,
'The use of surface EMG power spectral analysis in the
evaluation of back muscle function', Journal of
Rehabilitation, vol 34, pp. 427-39.
Moshoua, D, Hostensa, I & Papaioanno, G July 2005,
'Dynamic muscle fatigue detection using self-
organizing maps', Applied Soft Computing, Elsevier.
Poli, R, Langdon, WB & McPhee, N 2008, A field guide to
genetic programming, http://lulu.com.
Song, J-H, Jung, J-W & Zeungnam, B 2006, 'Robust EMG
Pattern Recognition to Muscular Fatigue Effect for
Human-Machine Interaction', Springer.
DETECTING LOCALISED MUSCLE FATIGUE DURING ISOMETRIC CONTRACTION USING GENETIC
PROGRAMMING
297
