
DOES FISHER INFORMATION
CONSTRAIN HUMAN MOTOR CONTROL?
Christopher M. Harris
SensoriMotor Laboratory
Centre for Theoretical and Computational Neuroscience, Centre for Robotics and Neural Systems
University of Plymouth, Plymouth, Devon PL4 8AA, U.K.
Keywords: Fisher information, Cramer-Rao bound, Fisher metric, Movement control, Minimum variance model,
Proportional noise, Signal dependent noise.
Abstract: Fisher information places a bound on the error (variance) in estimating a parameter. The nervous system,
however, often has to estimate the value of a variable on different occasions over a range of parameter
values (such as light intensities or motor forces). We explore the optimal way to distribute Fisher
information across a range of forces. We consider the simple integral of Fisher information, and the integral
of the square root of Fisher information because this functional is independent of re-parameterization of
force. We show that the square root functional is optimised by signal-dependent noise in which the standard
deviation of force noise is approximately proportional to the mean force up to about 50% maximum force,
which is in good agreement with empirical observation. The simple integral does not fit observations. We
also note that the usual Cramer-Rao bound is ‘extended’ with signal-dependent noise, but that this may not
be exploited by the biological motor system. We conclude that maximising the integral of the square root of
Fisher information can capture the signal dependent noise observed in natural point-to-point movements for
forces below about 50% of maximum voluntary contraction.
1 INTRODUCTION
A fundamental function of the nervous system is to
internally represent the values or ‘intensities’ of
external quantities that belong to a ratio scale. This
occurs in the sensory domain, such as representing
the brightness of a light, or in the motor domain such
as representing a desired force or limb position. For
motor control, the internal representation of force is
ultimately determined by the collective firing rates
of a population of stochastic neurons (the motor
neuron pool). Behavioural choices are made on the
basis of these internal representations, and it seems
likely that their neural organisations should come
under strong natural selection and become
optimised. But what is optimal?
If we consider only a single point along a scale
(eg. a specific desired force), say
θ
, then the
population of neurons (eg. motor neurons) should
generate an unbiased estimate
θ
ˆ
of
θ
. This estimate
will be noisy because of the stochastic firing of
neurons (and other sources) resulting in a probability
distribution
)
ˆ
(
θθ
p of estimates around
θ
. The
variance of this estimation,
()
2
2
ˆ
)(
θθθσ
−= must
be bound by the Fisher information,
)(
θ
I , according
to the Cramer-Rao limit:
)(
1
)(
2
θ
θσ
I
≥
(1)
where the Fisher information is given by
()
θ
θθ
θ
θ
ˆ
2
)
ˆ
(ln)(
⎟
⎠
⎞
⎜
⎝
⎛
∂
∂
= pI
(2)
The bound can be met by an efficient network of
N neurons, whose unbiased estimate
θ
ˆ
has a
Gaussian distribution.
However, how should a finite network estimate a
range
of values
max
0
θ
θ
≤
≤
? By this, we mean that
the same network is required to estimate different
values
max
0
θ
θ
≤
≤
on different occasions (ie.
separated sufficiently in time so that estimates are
414
Harris C. (2009).
DOES FISHER INFORMATION CONSTRAIN HUMAN MOTOR CONTROL?.
In Proceedings of the International Joint Conference on Computational Intelligence, pages 414-420
DOI: 10.5220/0002284704140420
Copyright
c
SciTePress

stochastically independent). It is obviously possible
to organise the network to provide an unbiased
estimate
θ
ˆ
of each
max
0
θ
θ
≤
≤ , but how should the
network resources be distributed across the range
max
0
θ
θ
≤≤ ? What is an optimal arrangement?
Human motor control provides an interesting
problem in this respect for three reasons. First, the
physiology of motor control is reasonably well
understood. In particular, the estimator and its error
are measurable as mean output force and variance
(or a filtered version such as effector position),
which can be approximated as the sum of individual
motor unit forces (Fuglevand et al., 1993). Second,
output force is stochastic with the property that noise
is signal-dependent with the standard deviation
roughly proportional to the mean (proportional
noise) (Schmidt e al., 1979; Galganski et al., 1993;
Enoka et al., 1999; Laidlaw et al., 2000; Jon et al
2001; Hamilton et al., 2004; Moritz et al., 2005).
Third, there is a considerable literature on optimal
control of human movement (eg. Nelson 1983;
Hogan 1984; Uno et al, 1989). In particular,
minimising motor output variance under the
constraint of proportional noise provides a good fit
to observed movement data (Harris & Wolpert,
1998), which implies that Fisher information may be
relevant to motor control.
2 FISHER FUNCTIONALS
Intuitively, we may be tempted to argue that an
overall figure of merit,
J , should be the integral
∫
=
max
0
)(
θ
θθ
dIJ
(3)
which would appear to maximise the Fisher
information assuming independent estimations at all
points in the range
max
0
θ
θ
≤
≤ . However, this is
really quite arbitrary, as in general, the Fisher
informations of two estimates maqy not be
independent, so that increasing
)(
i
I
θ
may
reduce
)(
j
I
θ
)( ji ≠ . Thus, we need to consider
some functional:
()
∫
=
max
0
)(
θ
θθ
dIJ
F
(4)
that ‘trades-off’ Fisher information across the range.
Fundamentally, we need a biological plausible
functional
(.)
F
.
2.1 Re-Parameterization
A network of motor units must cope with a variety
of different ‘environments’ including the effects of
other muscles, changing geometry of multi-jointed
limbs, changing loads, fatigue etc.. The effect of
motor units in the ‘real’ world will therefore vary. If
the optimization were not
independent of these
different contexts, then any optimization procedure
would force a particular metric that may not be
suitable for the current context. This requirement
tightly constrains
(.)
F
and implies that J should be
independent of re-parameterization of
θ
.
Denote a new metric by
)(
θ
φ
, which is
differentiable,
θ
θ
φ
φ
dd )(
′
=
, then we require
() ()
∫∫
==
maxmax
0
)(
)0(
)()(
θθφ
φ
θθφφ
dIdIJ
FF
.
(5)
Fisher information transforms according to:
)()(
2
θ
φ
θ
φ
II
∂
∂
→
(6)
so the simple functional in (3) would not be
invariant to the transformation in (5). However, the
square root of Fisher information would be
invariant:
(
)
.(.) ⇒
F
. We therefore consider the
functional
∫
=
max
0
)(
θ
θθ
dIJ .
(7)
2.2 Signal-Dependent Noise
If we assume a Gaussian estimator, it has been
proposed that the functional (7) at the Cramer-Rao
bound is equivalent to
∫
=
max
0
)(
1
θ
θ
θσ
dJ
(8a)
and also equivalent to
∫
′
∝
max
0
)(
1
θ
θ
θ
d
D
J
(8b)
where
D
′
(“d-prime”) is the well-known
psychophysical discrimination quantity derived from
signal detection theory (Nover et al., 2005), which
can also be viewed as a measure of channel capacity
(Harris, 2008). In general (8) is only true if
)(
θ
σ
is a
constant (signal-independent noise). Equation (4),
and hence (7), imply that
)(
θ
I may not be constant,
and that we must consider the case when the
DOES FISHER INFORMATION CONSTRAIN HUMAN MOTOR CONTROL?
415

estimator variance is allowed to change with the
parameter, that is signal-dependent noise:
≠)(
θ
σ
constant. As we see next, this affects Fisher
information.
Assume the standard deviation of the noise on
the estimate,
)(
θ
σ
, to be a deterministic function of
the signal mean, so that distribution of the estimate
has only one parameter:
)(2/)
ˆ
(
22
2)(
1
)
ˆ
(
θσθθ
πθσ
θθ
−−
= ep
(9)
Taking logs, we have
(
)
)(2/)
ˆ
())(ln()2ln()
ˆ
(ln
22
2
1
θσθθθσπθθ
−−−−=p
Hence
()
)(
)()
ˆ
(
)(
)
ˆ
(
)(
)(
)
ˆ
(ln
3
2
2
θσ
θσθθ
θσ
θθ
θσ
θσ
θθ
θ
′
−
+
−
+
′
−=
∂
∂
p
,
and the Fisher information is
)(
)(2
)(
1
)(
2
2
2
θσ
θσ
θσ
θ
′
+=I
(10a)
or the sum of two components:
)()()(
θ
θ
θ
depind
III
+
=
(10b)
For signal-in
dependent noise, )(
θ
σ
′
is zero and the
traditional result
2
/1
σ
==
ind
II is obtained. With
signal dependent noise (SDN), however, there is
more information to be had, which in principle could
be very large when
)(
θ
σ
′
is high. If the estimator
‘knows’ a priori the signal-dependent function
)(
θ
σ
, then an estimation of
θ
can be made purely
on the estimated variance, assuming
)(
θ
σ
is
invertible. This is the origin of
22
/2
σσ
′
=
dep
I .
Theoretically SDN offers more information than
signal-independent noise, but it is not clear whether
the nervous system can extract this additional SDN
Fisher information. Therefore we introduce the cost
functional
()
∫
+=
max
0
.
θ
θχ
dIIJ
depind
F
(11)
where
χ
is an ‘explanatory’ constant. For 0
=
χ
, no
SDN Fisher information is extracted, and for
1=
χ
the full amount is extracted.
3 OPTIMAL NETWORKS
3.1 Architecture
The unbiased estimation is a stochastic signal
θ
ˆ
that
is the weighted sum of N independent stochastic
signals
i
z
(neurons). Each neuron only fires when
its individual threshold,
i
θ
, is exceeded, otherwise it
is switched off and generates no noise. When
switched on, we assume all neurons are binary and
fire with a fixed unit mean firing rate and a fixed
variance
2
z
σ
:
∑
=
=
N
i
iii
zw
1
)(
ˆ
θθ
(12)
i
i
i
z
θθ
θθ
<
>
=
0
1
i
iz
ii
zz
θθ
θθσ
<
>
=−
0
2
2
2
We make a continuous approximation for large N,
such that
)(
θ
ρ
is the density of neurons with
thresholds in the region
),(
θ
θ
θ
d+ , where
∫
=
max
0
)(
θ
θθρ
dN
(13)
and
)(
θ
w is the weight of the units in ),(
θ
θ
θ
d+ . For
an unbiased estimator with mean
θ
, we require
∫
=
θ
θθθρθ
0
)()( dw
or
)(
1
)(
θ
θρ
w
=
(14)
The variance of the estimator will be given by the
sum of variances of the neurons above threshold:
∫
=
θ
θθθρσθσ
0
222
)()()( dw
z
(15)
3.2 Euler-Lagrange Equation
The general performance index from (10) and (11) is
∫
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
′
+=
max
0
2
2
2
)(
)(2
)(
1
θ
θ
θσ
θσ
χ
θσ
dJ
F
(16)
IJCCI 2009 - International Joint Conference on Computational Intelligence
416

Our variational problem is to maximise J with
respect to
)(
θ
σ
, subject to the constraint that we
have a finite number of neurons at our disposal (13).
For the sake of clarity, denote the estimator
variance by
)()(
2
θσθ
=V , and denote the derivatives
by
θ
θ
ddVV /)( ≡
′
and
22
/)(
θθ
dVdV ≡
′′
. We then
have
∫
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
′
+=
max
0
2
2
2
1
θ
θ
χ
d
V
V
V
J
F
.
(17)
Also, from (14) and (15), we have
)(
2
θρ
σ
z
V =
′
Thus the constraint (13) becomes
∫
′
=
max
0
2
1
θ
θ
σ
d
V
N
z
.
(18)
Equations (17) and (18) form an isoperimetric
variational problem with the Lagrangian:
()
V
V
V
V
VV
′
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
′
+=
′
λχ
θθθ
2
2
2
1
)(),(,
FL
(19)
where
λ
is a constant Lagrange multiplier. A
necessary condition for an extremal solution is given
by the Euler-Lagrange equation:
⎟
⎠
⎞
⎜
⎝
⎛
′
∂
∂
=
∂
∂
Vd
d
V
LL
θ
.
(20)
3.3 Solutions
3.3.1
0=
χ
;
∫
=
max
0
)(
θ
θθ
dIJ
We first consider the case when no
dep
I is extracted
)0( =
χ
from the square root functional
∫
=
max
0
)(
θ
θθ
dIJ (7). The Lagrangian is
V
V
′
+=
λ
2/1
1
L
, and the Euler Lagrange equation is
constant
4
2/3
3
=−=
′′
′
λ
VV
V
(21)
This has a solution:
()
2
2/12
)1(1)()(
θθσθ
cbaV −−=≡ ,
where
cba ,, are constants [this is a more general
solution than previously described by Harris (2008)].
Substituting into (7), it can be shown graphically or
by taking derivatives with respect to b and c, that a
maximum is obtained for
max
/1
θ
=c and 1=b , so that
(
)
2/1
max
)/1(1)(
θθθσ
−−= a
(22)
and is plotted in figure 1 (lower curve). For small
θ
,
we have the asymptotic relationship:
θ
θ
σ
∝
)(
,
(23)
which is proportional noise. This is very similar to
observations for forces below about 50% of
maximum. We note that (22) implies a singularity in
)(
θ
ρ
as 0→
θ
, which is physiologically impossible
as it would require infinite resources. One way to
avoid this is to make
ε
−
=
1b , where
ε
a small
positive constant. This renders
)(
θ
ρ
finite but at the
cost of introducing a small variance (and loss of
information) at the origin. We can find the constant
a in (22) from the normalization constraint (18).
Differentiating (22) and substituting into (18) we
have
()
∫
−−
=
−
max
0
2/1
max
max
2
2
/1
1
θ
θ
θθ
θσ
d
b
N
a
z
.
(24)
And
(
)
))/1()(
2/1
max
bw −−∝
−
θθθ
(25a)
(
)
1
2/1
max
))/1()(
−
−
−−∝ bx
θθρ
(25b)
which shows that the optimal weights increase with
force (ie. stronger units are recruited) and that the
number of units decreases. Thus the size principle
emerges as the optimal strategy.
3.3.2 0
=
χ
;
∫
=
max
0
)(
θ
θθ
dIJ
It is interesting to examine the simple functional
∫
=
max
0
)(
θ
θθ
dIJ
for 0
=
χ
. The Lagrangian is
VV
′
+=
λ
1
L
, and the Euler Lagrange equation is
constant
4
2
3
=−=
′′
′
λ
VV
V
. (26)
This has a solution of the form
)exp()(
θ
θ
baV
=
(27)
where
ba, are positive constants. From the constraint
(18), we have
()
)exp(1
1
max
22
θ
σ
b
ab
N
z
−−=
(28)
DOES FISHER INFORMATION CONSTRAIN HUMAN MOTOR CONTROL?
417
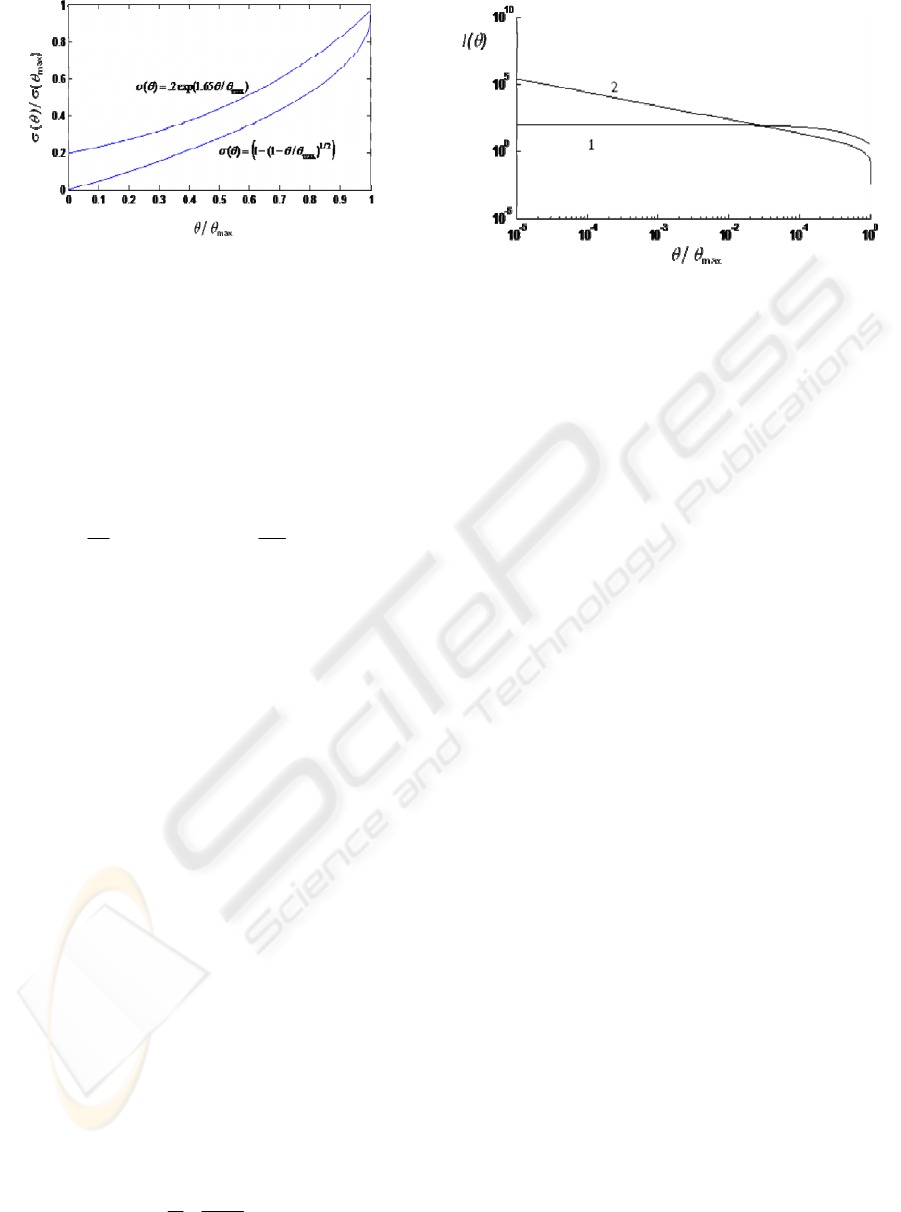
Figure 1: Plot of optimal noise )(
θ
σ
against mean force
θ
as a proportion of maximum. Bottom curve shows the
optimal solution (22) for the square-root functional (7).
Note linear asymptote for forces below 50% maximum
similar to empirical observations. Top curve shows the
optimal solution (27) for the simple functional (3). Note
the large offset at origin which is not observed
empirically.
and we note that ba, are not uniquely determined.
Therefore
()
2
max
)exp(1
1
z
bN
b
ab
J
σ
θ
=−−= ,
(29)
which is unbounded because b can be made
arbitrarily large. For a motor system there must be
an upper limit on variance:
)exp()(
maxmaxmax
θθ
baV =
(30)
corresponding to all motor units being recruited.
This will place a limit on b. The upper curve in
figure 1 shows this optimal relationship when
equated for the same constraints [(18) and (30)] as in
the optimal relationship for the square-root
functional (22). Signal-dependent noise is still
required, but there is a large variance at zero force.
This is not observed in empirical data.
When we examine how Fisher information is
distributed across the range (figure 2), we see that
the simple functional leads to an approximately
constant
)(
θ
I , whereas the square-root functional
places more information at smaller forces with
approximately
θ
θ
/1)( ∝I .
3.3.3
0>
χ
Now consider the full functional with signal
dependent Fisher information:
∫
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
′
+=
max
0
2
2
2
1
θ
θ
χ
d
V
V
V
J
F
(31)
Figure 2: Plots of Fisher information
)(
θ
I
. Curve 1 shows
)(
θ
I optimised for simple functional (3) (upper curve in
fig.1). Curve 2 shows )(
θ
I when optimised for square-
root functional (7) (lower curve in fig.1).
For any monotonically increasing function (.)
F
(as
we are considering here), the problem is not well-
posed because J can be made arbitrarily high by
increasing
)(
θ
V
′
with no counteracting penalty in the
constraint (18). Indeed, if
)(
θ
V contained a step
function then
∞
→
′
)(
θ
V at the step and there would
be no penalty at the step since
0)(/1 →
′
θ
V .
4 DISCUSSION
The error of an unbiased estimator is bound by
Fisher information,
)(
θ
I
, (the Cramer Rao bound
see (1). This bound can be met by an estimator with
a Gaussian distribution (and some other
distributions, see Frieden, 2004). However, when we
wish to make estimations of a parameter
θ
over a
range of parameter values,
max
0
θθ
≤≤
, there is no
straightforward bound. Obviously, if the error of
estimation at any parameter value is unaffected by
the error at any other value, then the best policy
would be to maximise
)(
θ
I at each
θ
. For the
nervous system, this could not occur because of the
limited resources in any neural estimator. Reducing
the error of estimation requires devoting more
neurons to the task, and given a finite population,
error cannot be reduced arbitrarily across the range,
and a trade-off would be required, (even though all
individual estimations may be at the Cramer-Rao
bound). This leads to the notion that we need to
maximise some functional of Fisher information:
()
∫
=
max
0
)(
θ
θθ
dIJ
F
(see sect. 2), but what is nature’s
functional?
IJCCI 2009 - International Joint Conference on Computational Intelligence
418

Although, Fisher information has been examined
from the viewpoint of population coding of sensory
information (eg. Seung & Sompolinsky, 1993;
Brunel & Nadal, 1998), or in characterising neural
activity (Toyoizumi et al., 2006), it is equally
applicable to biological motor systems. Here the
pool of motor units are required to estimate the
desired force (or behavioural motor output). It is
biological desirable to minimise output variance
(Harris & Wolpert, 1998), and as in any statistical
system, this must be limited by the Fisher
information. Motor force is stochastic, and is the
sum of individual forces generated by numerous
motor units. The distribution of inter-spike intervals
of motor neurons tend to have low coefficients of
variability (Clamman, 1969), and consequently the
distributions of firing rates
are complex, but not
Gaussian. However, provided there is sufficient
recruitment of motor units with some degree of
independence (ie. there are many degrees of
freedom), then the central limit theorem assures us
that total force should be asymptotically Gaussian.
We postulate that the organisation of motor units
should be independent of any re-mapping of the
desired output force (at least in the short term). Such
remapping will occur, for example, during co-
contraction of an antagonistic muscle which affects
the output force of the agonist muscle. An analogous
argument for re-parameterization independence has
been made in physics (Calmet & Calmet 2005), and
leads to the square root functional:
∫
=
max
0
)(
θ
θθ
dIJ . Using variational calculus, we
can find analytically the
)(
θ
I that maximises this
functional. To do this, we have assumed that all
motor neurons fire at a fixed rate when recruited.
We believe this is a reasonable approximation as
forces, not close to zero, are generated by many
saturated motor neurons.
We find that the optimal distribution of neuron
thresholds and weights leads to signal-dependent
noise (SDN):
(
)
2/1
max
)/1(1)(
θθθσ
−−= a
, which to a
good approximation is proportional noise for forces
below 50% maximum (see fig.1 bottom curve). This
is in good agreement with observation (see
introduction). For larger forces, the SDN becomes
accelerative. There is little empirical data at such
large forces, but there is some suggestion of
accelerative increase (Slifkin & Newell, 1999). This
type of SDN also requires a size principle to emerge
with larger forces requiring the recruitment of units
that are stronger (higher weights) and larger
thresholds, which again is consistent with
observation (Henneman, 1967). It is worth noting
that this organisation requires that Fisher
information falls away rapidly with increasing force
according to a power function (fig.2). Hence, there is
relatively negligible information at large forces and
it is possible that there is no strong drive to optimise
such large forces. In summary, observed force is
consistent with optimising the square-root Fisher
functional, and not consistent with maximising
simple Fisher integral (3) (see fig.1).
An intriguing issue arises when we consider
signal-dependent noise since the Cramer-Rao bound
is extended (Section 2.2). With SDN, the amount of
information can be raised well beyond the
conventional bound for a Gaussian distribution by
increasing
)(
θ
σ
′
and keeping )(
θ
σ
low (10). The
reason for this gain is that the degree of estimator
error is itself a measure of the parameter. In other
words signal-dependent noise is beneficial in its own
right. Maximising the full Fisher information would
be achieved by step–like functions in the SDN
relationship and not by observed SDN. Moreover,
observed slopes tend to be of the order of a few
percent. Thus from (10) we see that the additional
information
)(
θ
dep
I is a negligible fraction of
)(
θ
ind
I . Nevertheless, it remains to be explored
whether the nervous system exploits the full Fisher
information.
ACKNOWLEDGEMENTS
I would like to thank Peter Latham for many useful
discussions.
REFERENCES
Brunel, N., Nadal, J., 1998, Mutual information, Fisher
information, and population coding, Neural Comput
10, 1731–1757.
Calmet, X., Calmet, J., 2005, Dynamics of the Fisher
information metric, Phys Rev E 71 056109-1 -
056109-5.
Clamann, H.P., 1969, Statistical analysis of motor unit
firing patterns in a human skeletal muscle. Biophys J
9, 1233-1251.
Enoka, R.M., Burnett, R.A., Graves, A.E., Kornatz, K.W.,
Laidlaw, D.H., 1999, Task- and age-dependent
variations in steadiness. Prog Brain Res 123: 389-395.
Frieden, B.R., 2004, Science form information, Cambridge
University Press, Cambridge.
DOES FISHER INFORMATION CONSTRAIN HUMAN MOTOR CONTROL?
419

Fuglevand, A.J., Winter, D.A., Patla, A.E., 1993, Models
of recruitment and rate coding organization in motor-
unit pools. J Neurophysiol 70:2470-2488
Galganski, M.E., Fuglevand, A.J., Enoka, R.M., 1993,
Reduced control of motor output in human hand
muscle of elderly subjects during submaximal
contractions. J Neurophysiol 69: 2108-2115.
Hamilton, A.F., Jones, K,E., Wolpert, D.M., 2004, The
scaling of motor noise with muscle strength and motor
unit number in humans. Exp Brain Res 157: 417-430.
Harris, C.M., Wolpert, D.M., 1998, Signal-dependent
noise determines motor planning. Nature 394: 780-
784.
Harris CM (2008) Biomimetics and proportional noise in
motor control. Biosignals (2) 37-43
Henneman, E., 1967, Relation between size of neurons
and their susceptibility to discharge. Science 126:
1345-1347.
Hogan, N.,1984, An organizing principle for a class of
voluntary movements J Neurosci 4: 2745-2754.
Jones, K.E., Hamilton, A.F., Wolpert D.M., 2001, Sources
of signal-dependent noise during isometric force
production. J Neurophysiol 88, 1533-1544.
Laidlaw, D.H., Bilodeau, M., Enoka, R.M., 2000,
Steadiness is reduced and motor unit discharge is more
variable in old adults. Muscle Nerve 23: 600-612.
Moritz, C.T., Barry, B.K., Pascoe, M.A., Enoka, R.M.,
2005, Discharge rate variability influences the
variation in force fluctuation across the working range
of a hand muscles. J Neurophysiol 93: 2449-2459.
Nelson, W.L., 1983, Physical principles for economics of
skilled movements. Biol Cybern 46: 135-147.
Nover, H., Anderson, C.H., DeAngelis, G.C., 2005, A
logarithmic, scale-invariant representation of speed in
macaque middle temporal area account for speed
discrimination performance. J Neurosci 25, 10049-
10060.
Schmidt, R.A., Zelaznik, H., Hawkins, B., Frank, J.S.,
Quinn, J.T., 1979, Motor-output variability: a theory
for the accuracy of rapid motor acts. Psych Rev
66:415-451.
Seung, H. S., & Sompolinsky, H. (1993). Simple models
for reading neural population codes. P.N.A.S. USA,
90, 10749–10753.
Slifkin, A.B., Newell, K.M., 1999, Noise information
transmission and force variability. J Exp Psychol 25:
837-851.
Toyoizumi, T., Aihara, K., Amari, S., 2006, Fisher
information for spike-based population decoding.
Physical Rev Letters, 97, 098102-1--098102-4.
Uno, Y., Kawato, M., Suzuki, R., 1989, Formation and
control of optimal trajectories in human multijoint are
movements. Minimum torque change model. Biol
Cybern 61, 89-101.
IJCCI 2009 - International Joint Conference on Computational Intelligence
420
