
Minimal Architecture and Training Parameters of
Multilayer Perceptron for its Efficient Parallelization
Volodymyr Turchenko and Lucio Grandinetti
Department of Electronics, Informatics and Systems, University of Calabria
via P. Bucci 22B, 87036, Rende (CS), Italy
Abstract. The development of a parallel algorithm for batch pattern training of
a multilayer perceptron with the back propagation algorithm and the research of
its efficiency on a general-purpose parallel computer are presented in this paper.
The multilayer perceptron model and the usual sequential batch pattern training
algorithm are theoretically described. An algorithmic description of the parallel
version of the batch pattern training method is introduced. The efficiency of the
developed parallel algorithm is investigated by progressively increasing the
dimension of the parallelized problem on a general-purpose parallel computer
NEC TX-7. A minimal architecture for the multilayer perceptron and its
training parameters for an efficient parallelization are given.
1 Introduction
Artificial neural networks (NNs) have excellent abilities to model difficult nonlinear
systems. They represent a very good alternative to traditional methods for solving
complex problems in many fields, including image processing, predictions, pattern
recognition, robotics, optimization, etc [1]. However, most NN models require high
computational load, especially in the training phase (up to days and weeks). This is,
indeed, the main obstacle to face for an efficient use of NNs in real-world
applications. Taking into account the parallel nature of NNs, many researchers have
already focused their attention on their parallelization [2-4]. Most of the existing
parallelization approaches are based on specialized computing hardware and
transputers, which are capable to fulfill the specific neural operations more quickly
than general-purpose parallel and high performance computers. However
computational clusters and Grids have gained tremendous popularity in computation
science during last decade [5]. Computational Grids are considered as heterogeneous
systems, which may include high performance computers with parallel architecture
and computational clusters based on standard PCs. Therefore, existing solutions for
NNs parallelization on transputer architectures should be re-designed. Parallelization
efficiency should be explored on general-purpose parallel and high performance
computers in order to provide an efficient usage within computational Grid systems.
Many researchers have already developed parallel algorithms for NNs training on
weights (connections), neuron (node), training set (pattern) and modular levels [6-10].
The first two levels are a fine-grain parallelism and the second two levels are a
Turchenko V. and Grandinetti L. (2009).
Minimal Architecture and Training Parameters of Multilayer Perceptron for its Efficient Parallelization .
In Proceedings of the 5th International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 79-87
DOI: 10.5220/0002265800790087
Copyright
c
SciTePress

coarse-grain parallelism. Connection parallelism (parallel execution on sets of
weights) and node parallelism (parallel execution of operations on sets of neurons)
schemes are not efficient while executing on a general-purpose high performance
computer due to high synchronization and communication overhead among parallel
processors [10]. Therefore coarse-grain approaches of pattern and modular
parallelism should be used to parallelize NNs training on general-purpose parallel
computers and computational Grids [9]. For example, one of the existing
implementation of the batch pattern back propagation (BP) training algorithm [6] has
efficiency of 80% while executing on a 10 processors of transputer ТМВ08.
However, the efficiency of this algorithm on general-purpose high-performance
computers is not researched yet.
The goal of this paper is to research the parallelization efficiency of parallel batch
pattern BP training algorithm on a general-purpose parallel computer in order to form
the recommendations for further usage of this algorithm on heterogeneous Grid
system.
2 Architecture of Multilayer Perceptron and Batch Pattern
Training Algorithm
It is expedient to research parallelization of multi-layer perceptron (MLP) because
this kind of NN has the advantage of being simple and provides good generalizing
properties. Therefore it is often used for many practical tasks including prediction,
recognition, optimization and control [1]. However, parallelization of an MLP with
the standard sequential BP training algorithm does not provide efficient
parallelization due to high synchronization and communication overhead among
parallel processors [10]. Therefore it is expedient to use the batch pattern training
algorithm, which updates neurons’ weights and thresholds at the end of each training
epoch, i.e. after the presentation of all the input and output training patterns, instead
of updating weights and thresholds after the presentation of each pattern in the usual
sequential training mode.
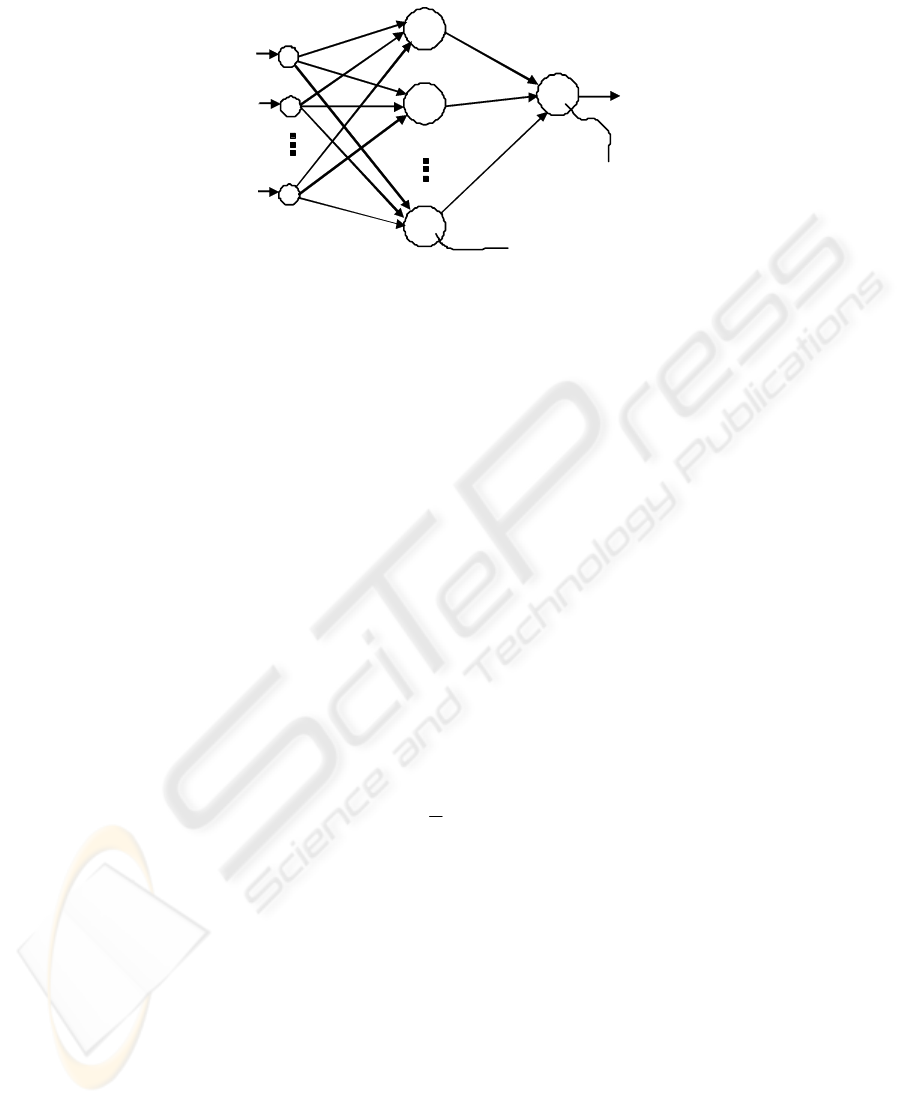
The output value of a three-layer perceptron (Fig. 1) can be formulated as:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎠
⎞
⎜
⎝
⎛
−=
∑∑
==
TTxwFwFy
N
j
j
M
i
iijj
11
233
(1)
where is the number of neurons in the hidden layer, is the weight of the
synapse from neuron of the hidden layer to the output neuron, are the weights
from the input neurons to neuron in the hidden layer, are the input values,
are the thresholds of the neurons of the hidden layer and
T is the threshold of the
output neuron [1, 11]. In this study the logistic activation function
is used for the neurons of the hidden ( ) and output layers ( ), but in general case
these activation functions could be different.
N
3j
w
i
3
F
j
ij
w
(F
j x
j
T
)
x−
1/(1) ex +=
2
F
The batch pattern BP training algorithm consists of the following steps [11]:
80
13
w
23
w
3N
w
T
ij
w
j
T
y
N
h
2
h
1
h
2
x
M
x
1
x
Fig. 1. The structure of a three-layer perception.
1. Set the desired error (Sum Squared Error) SSE=
min
E and the number of training
iterations
t
;
2.
Initialize the weights and the thresholds of the neurons with values in range
(0…0.5) [12];
3.
For the training pattern pt :
3.1. Calculate the output value )(ty
pt
by expression (1);
3.2.
Calculate the error of the output neuron )() , where
is the output value of the perceptron and
)(td
pt
is the target output value;
()(
3
tdtyt
ptptpt
−=
γ
)(ty
pt
3.3.
Calculate the hidden layer neurons’ error ))(( ,
where
)(tS
pt
is the weighted sum of the output neuron;
)()()(
333
tSFtwtt
pt
j
ptpt
j
′
⋅⋅=
γγ
3.4.
Calculate the delta weights and delta thresholds of all perceptron’s neurons
and add the result to the value of the previous pattern
)())( , ))(( ,
)())( , ))(( ,
where
)(tS
pt
j
and )(th
pt
j
are the weighted sum and the output value of the
hidden neuron respectively;
()(
3333
thtSFtwsws
pt
j
ptpt
jj
⋅
′
⋅+Δ=Δ
γ
()(
2
txtSFtwsws
pt
i
pt
j
pt
jijij
⋅
′
⋅+Δ=Δ
γ
)(
33
tSFtTsTs
ptpt
′
⋅+Δ=Δ
γ
)(
2
tSFtTsTs
pt
j
pt
jjj
′
⋅+Δ=Δ
γ
j
3.5.
Calculate the SSE using
()
2
)()(
2
1
)( tdtytE
ptptpt
−= ;
4.
Repeat the step 3 above for each training pattern p
t
, where
{
}
PTpt ,...,1
∈
,
P
T
is
the size of the training set;
5.
Update the weights and thresholds of neurons using
ijijij
wstwPTw Δ⋅
−
=
)()0()(
α
,
jjj
TstTPTT Δ⋅+= )()0()(
α
, where )(t
α
is the learning rate;
6.
Calculate the total SSE )(tE on the training iteration
t
using
∑
pt
pt
tE ;
=
=tE
1
)()(
PT
7. If
)(tE
is greater than the desired error
min
E then increase the number of training
iteration to
1+t and go to step 3, otherwise stop the training process.
81

3 Parallel Batch Pattern Back Propagation Training Algorithm
It is obvious from analysis of the batch pattern BP training algorithm in Section 2
above, that the sequential execution of points 3.1-3.5 for all training patterns in the
training set could be parallelized, because the sum operations
ij
ws
Δ
and are
independent of each other. For the development of the parallel algorithm it is
necessary to divide all the computational work among the
Master (executing
assigning functions and calculations) and the
Slaves (executing only calculations)
processors.
j
TsΔ
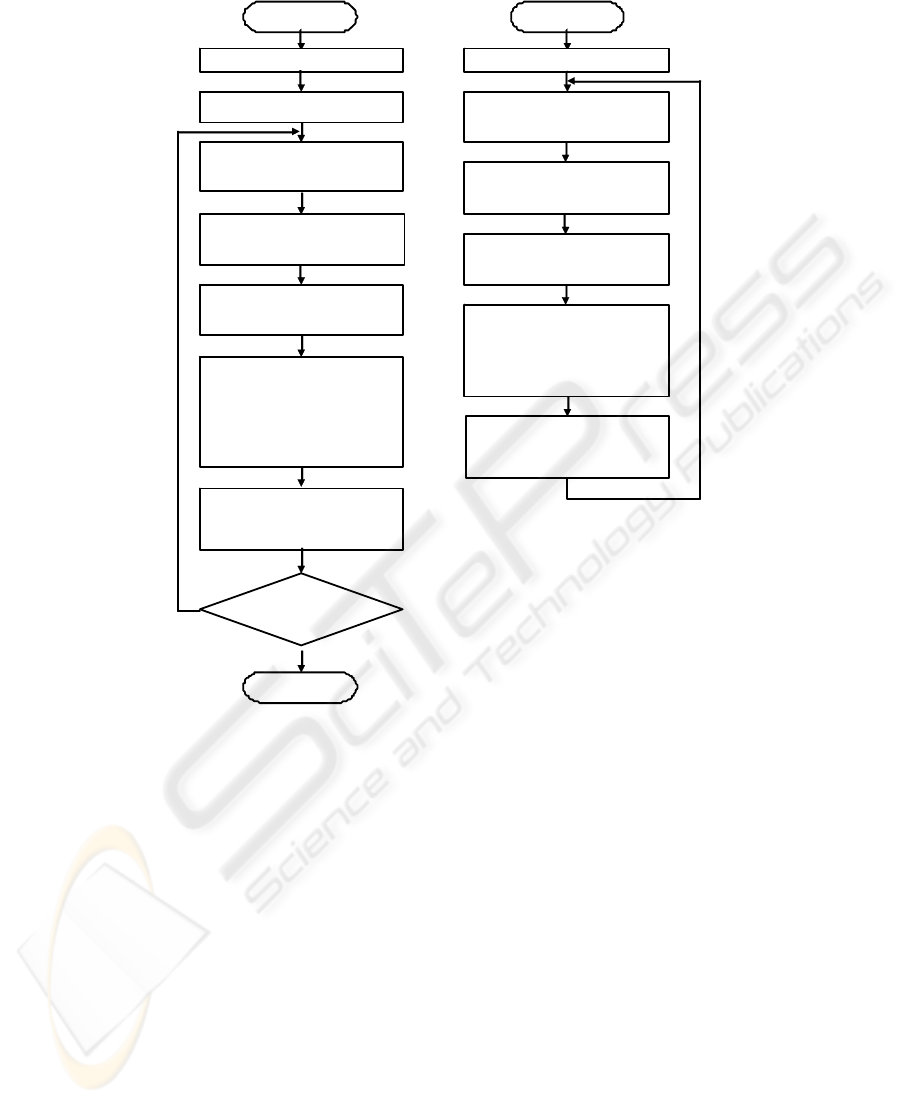
The algorithms for
Master and Slave processors functioning are depicted in Fig. 2.
The
Master starts with definition (i) the number of patterns PT in the training data set
and (ii) the number of processors
p used for the parallel executing of the training
algorithm. The
Master divides all patterns in equal parts corresponding to number of
the
Slaves and assigns one part of patterns to himself. Then the Master sends to the
Slaves the numbers of the appropriate patterns to train.
Each
Slave executes the following operations for each pattern pt among the PT/p
patterns assigned to him:
• calculate the points 3.1-3.5 and 4, only for its assigned number of training
patterns. The values of the partial sums of delta weights
ij
ws
Δ
and delta
thresholds
j
TsΔ are calculated here;
• calculate the partial SSE for its assigned number of training patterns.
After processing all its assigned patterns, each
Slave waits for the other Slaves and
the
Master at the synchronization point. At the same time the Master computes the
partial values of and for its own (assigned to himself) number of training
patterns.
ij
wsΔ
j
TsΔ
The global operations of reduction and summation are executed just after the
synchronization point. Then the summarized values of the
ij
ws
Δ
and
j
Ts
Δ
are sent to
all the processors working in parallel. Using a global reducing operation and
simultaneously returning the reduced values back to the
Slaves allows a decrease of
the time overhead in the synchronization point. Then the summarized values of
and are placed into the local memory of each processor. Each
Slave and the
Master use these values and
ij
wsΔ
j
TsΔ
ij
wsΔ
j
Ts
Δ
in order to update the weights and thresholds
according to the point 5 of the algorithm. These updated weights and thresholds will
be used in the next iteration of the training algorithm. As the summarized value of
is also received as a result of the reducing operation, the
Master decides
whether to continue the training or not.
)(tE
The software routine is developed using the C programming language with the
standard MPI library. The parallel part of the algorithm starts with the call of the
MPI_Init() function. The parallel processors use the synchronization point
MPI_Barrier(). The reducing of the deltas of weights
ij
ws
Δ
and thresholds is
provided by function
MPI_Allreduce(), which allows to avoid an additional step for
sending back the updated weights and thresholds from the
Master to each Slave.
Function
MPI_Finalize() finishes the parallel part of the algorithm.
j
TsΔ
82
No
Yes
Star
t
Read the in
p
ut data
Update
ij
w ,
j
T
according to p.5
Reduce and Sum
ij
wsΔ ,
j
TsΔ
,
)(tE
from all
Slaves and send it back
to all Slaves
min
)( EtE >
End
a
)
Star
t
Read the in
p
ut data
Receive PT/p patterns
from Master
b)
Define PT and p
Send PT/p patterns to
each Slave
Calculate p.3 and p.4 for
own training patterns
Synchronization with
other Slaves
Reduce and Sum
ij
wsΔ ,
j
TsΔ , )(tE from all
Slaves and Master
Calculate p.3 and p.4 for
assigned training patterns
Synchronization with
other Slaves and Master
Update
ij
w ,
j
T
according to p.5
Fig. 2. The algorithms of the Master (a) and the Slave (b) processors.
4 Experimental Researches
Our experiments were carried out on a parallel supercomputer NEC TX-7, located in
the Center of Excellence of High Performance Computing, University of Calabria,
Italy (www.hpcc.unical.it). NEC TX-7 consists in 4 identical units. Each unit has 4
Gb RAM, 4 64-bit processors Intel Itanium2 with a clock rate of 1 GHz. This 16
th
-
processor computer with 64 Gb of total RAM has a performance peak of 64 GFLOPS.
The NEC TX-7 is functioning under the Linux operation system.
As shown in [12], the parallelization efficiency of parallel batch pattern BP
algorithm for MLP does not depend on the number of training epochs. Parallelization
efficiencies of this algorithm are respectively 95%, 84% and 63% on 2, 4 and 8
processors of the general-purpose NEC TX-7 parallel computer for a 5-10-1 MLP
83

with 794 training patterns and an increasing number of training epochs from 10
4
to
10
6
.
As shown in [7], parameters such as the number of training patterns and the
number of adjustable connections of NN (number of weights and thresholds) define
the computational complexity of the training algorithm and, therefore, exert influence
on its parallelization efficiency. Therefore, research efficiency scenarios should be
based on these parameters. In this case the purpose of our experimental research is to
answer the question: what is the minimal/enough number of MLP connections and
what is the minimal/enough number of training patterns in the input data set for the
parallelization of batch pattern BP training algorithm to be efficient on a general-
purpose high performance computer?
The following architectures of MLP are researched in order to provide the analysis
of efficiency: 3-3-1 (3 input neurons × 3 hidden neurons =
9 weights between the
input and the hidden layer +
3 weights between the hidden and the output layer + 3
thresholds of the hidden neurons and
1 threshold of the output neuron = 16
connections), 5-5-1 (36 connections), 5-10-1 (71 connections), 10-10-1 (121
connections), 10-15-1 (181 connections), 15-15-1 (256 connections), 20-20-1 (441
connections). The number of training patterns is changed as 25, 50, 75, 100, 200, 400,
600 and 800. It is necessary to note that such MLP architectures and number of
training patterns are typical for most of neural-computation applications. During the
research the neurons of the hidden and output layers have logistic activation
functions. The number of training epochs is fixed to 10
5
. The learning rate is constant
and equal
01.0)( =t
α
.
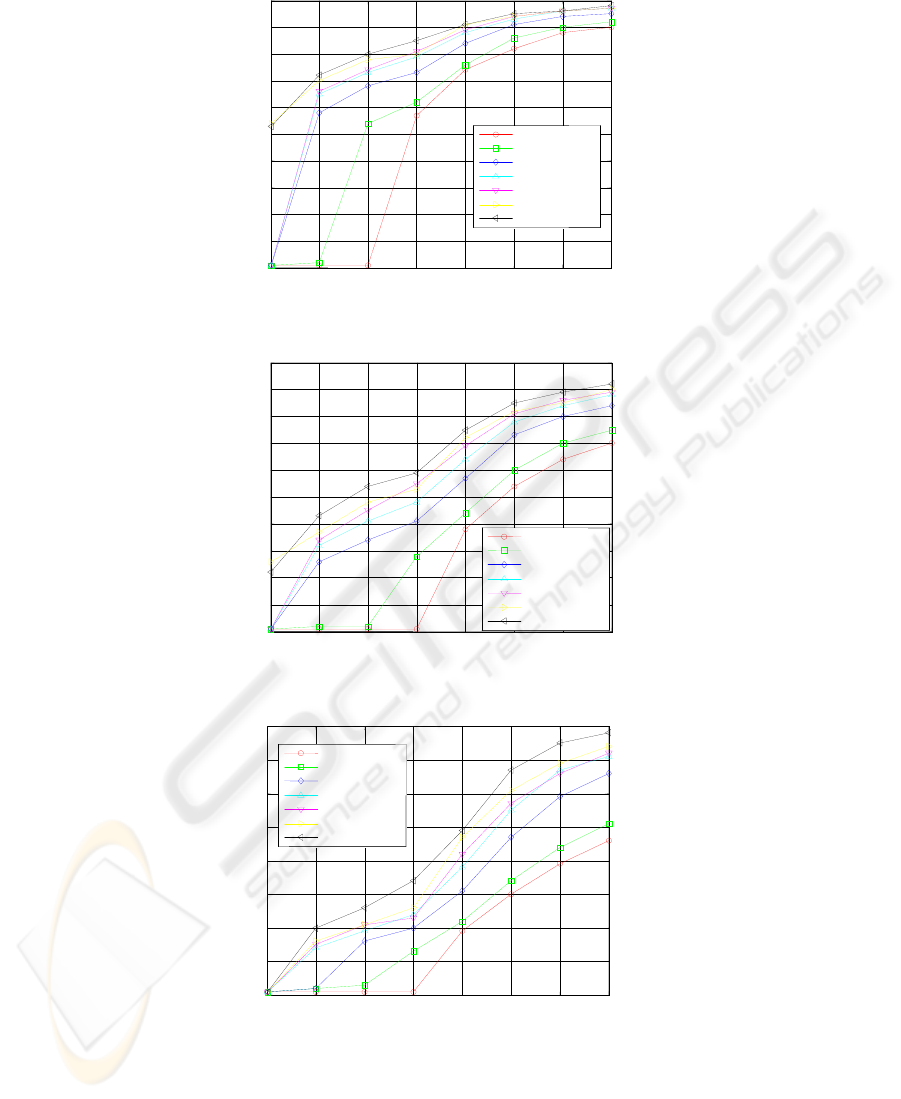
The parallelization efficiency of the batch pattern BP training algorithm is
depicted in Figs. 3-5 on 2, 4 and 8 processors of NEC TX-7 respectively. The
expressions
S=Ts/Tp and E=S/p×100% are used to calculate a speedup and efficiency
of parallelization, where
Ts is the time of sequential executing the routine, Tp is the
time of parallel executing of the same routine on
p processors of parallel computer. It
is necessary to use the obtained results as the following: (i) first to choose the number
of parallel processors used (Fig. 3 or Fig. 4 or Fig. 5), (ii) then to choose the curve,
which characterizes the necessary number of perceptron’s connections and (iii) then
to get the value of parallelization efficiency from ordinate axes which corresponds to
the necessary number of training patterns on abscissa axes. For example, the
parallelization efficiency of the MLP 5-5-1 (36 connections) is 65% with 500 training
patterns on 4 processors of NEC TX-7 (see Fig. 4). Therefore the presented curves are
the approximation characteristics of a parallelization efficiency of the certain MLP
architecture on the certain number of processors of a general-purpose parallel
computer.
As it is seen from the Figs. 3-5, the parallelization efficiency is increasing when
the number of connections and the number of the training patterns is increased.
However, the parallelization efficiency is decreasing for the same scenario at
increasing the number of parallel processors from 2 to 8. The analysis of the Figs. 3-5
allows defining the minimum number of the training patterns which is necessary to
use for efficient parallelization of the batch pattern training algorithm at the certain
number of MLP connections (Table 1).
84
100
Fig. 3. Parallelization efficiency on 2 processors of NEC TX-7.
Fig. 4. Parallelization efficiency on 4 processors of NEC TX-7.
Fig. 5. Parallelization efficiency on 8 processors of NEC TX-7.
25 50 75 100 200 400 600 800
0
10
20
30
40
50
60
70
80
Training patterns
Efficiency on 8 processors, %
16 connections
36 connections
71 connections
121 connections
181 connections
256 connections
441 connections
25 50 75 100 200 400 600 800
0
10
20
30
40
50
60
70
80
90
100
Training patterns
Efficiency on 4 processors, %
16 connections
36 connections
71 connections
121 connections
181 connections
256 connections
441 connections
90
80
25 50 75 100 200 400 600 800
0
10
20
30
40
50
60
70
Efficiency on 2 processors, %
16 connections
36 connections
71 connections
121 connections
181 connections
256 connections
441 connections
Training patterns
85

For example, the Table 1 shows that the number of training patterns should be 100
and more (100+) for efficient parallelization of MLP with the number of connections
more than 16 and less and equal than 36. As it is seen from the Table 1, it is necessary
to use more training patterns in a case of small MLP architectures. The minimum
number of the training patterns is increasing in a case of parallelization on the bigger
number of parallel processors.
Table 1. Minimum number of training patterns for efficient parallelization on NEC TX-7.
2 processors 4 processors 8 processors
Connections
number, C
Training
patterns
Connections
number, C
Training
patterns
Connections
number, C
Training
patterns
16 < C ≤ 36 100+ 16 < C ≤ 36 200+ 16 < C ≤ 36 200+
36 < C ≤ 71 75+ 36 < C ≤ 71 100+ 36 < C ≤ 71 100+
71 < C ≤ 256 50+ 71 < C ≤ 256 50+ 71 < C ≤ 121 75+
C > 256 25+ C > 256 25+ C > 121 50+
5 Conclusions
The parallel batch pattern back propagation training algorithm of multilayer
perceptron is developed in this paper. The analysis of parallelization efficiency is
done for 7 scenarios of increasing the perceptron’s connections (number of weights
and thresholds), in particular 16, 36, 71, 121, 181, 256 and 441 and increasing the
number of training patterns, in particular 25, 50, 75, 100, 200, 400, 600, 800. The
presented results can be used for estimation a parallelization efficiency of concrete
perceptron model with concrete number of training patterns on the certain number of
parallel processors of a general-purpose parallel computer. The experimental research
proves that the parallelization efficiency of batch pattern back propagation training
algorithm is (i) increasing at increasing the number of connections and increasing the
number of the training patterns and (ii) decreasing for the same scenario at increasing
the number of parallel processors from 2 to 8. The results of analysis of minimum
number of training patterns for efficient parallelization of this algorithm show that (i)
it is necessary to use more training patterns in case of small architectures of
multilayer perceptron and (ii) the minimum number of the training patterns should be
increased in a case of parallelization on the bigger number of parallel processors.
The provided level of parallelization efficiency is enough for using this parallel
algorithm in Grid environment on the general-purpose parallel and high performance
computers. For the future research it is expedient to estimate the factors of decreasing
the parallelization efficiency of batch pattern back propagation training algorithm at
small number of training patterns and small number of adjustable connections of
multilayer perceptron.
86

Acknowledgements
This research is financially supported by a Marie Curie International
Incoming Fellowship grant of the corresponding author Dr. V. Turchenko,
Ref. Num. 221524 “PaGaLiNNeT - Parallel Grid-aware Library for Neural
Networks Training", within the 7
th
European Community Framework
Programme. This support is gratefully acknowledged.
We wish to thank anonymous referees for thoughtful and helpful comments which
improved the readability of the paper.
References
1. Haykin, S.: Neural Networks. Prentice Hall, New Jersey (1999).
2.
Mahapatra, S., Mahapatra, R., Chatterji, B.: A Parallel Formulation of BP Learning on
Distributed Memory Multiprocessors. Parallel Computing. 22 (12) (1997) 1661–1675.
3.
Hanzálek, Z.: A Parallel Algorithm for Gradient Training of Feed-forward Neural
Networks. Parallel Computing. 24 (5-6) (1998) 823–839.
4.
Murre, J.M.J.: Transputers and Neural Networks: An Analysis of Implementation
Constraints and Perform. IEEE Transactions on Neural Networks. 4 (2) (1993) 284–292.
5.
Dongarra, J., Shimasaki, M., Tourancheau, B.: Clusters and Computational Grids for
Scientific Computing. Parallel Computing. 27 (11) (2001) 1401–1402.
6.
Topping, B.H.V., Khan, A.I., Bahreininejad, A.: Parallel Training of Neural Networks for
Finite Element Mesh Decomposition. Computers and Structures. 63 (4) (1997) 693–707.
7.
Rogers, R.O., Skillicorn, D.B.: Using the BSP Cost Model to Optimise Parallel Neural
Network Training. Future Generation Computer Systems. 14 (5) (1998) 409–424.
8.
Ribeiro, B., Albrecht, R.F., Dobnikar, A., et al: Parallel Implementations of Feed-forward
Neural Network using MPI and C# on .NET Platform. In: Proceedings of the International
Conference on Adaptive and Natural Computing Algorithms. Coimbra (2005) 534–537.
9.
Turchenko, V.: Computational Grid vs. Parallel Computer for Coarse-Grain Parallelization
of Neural Networks Training. In: Meersman, R., Tari, Z., Herrero, P. (eds.): OTM 2005.
Lecture Notes in Computing Science, vol. 3762. Springer-Verlag, Berlin Heidelberg New
York (2005) 357–366.
10.
Turchenko, V.: Fine-Grain Approach to Development of Parallel Training Algorithm of
Multi-Layer Perceptron. Artificial Intelligence, the Journal of National Academy of
Sciences of Ukraine. 1 (2006) 94–102.
11.
Golovko, V., Galushkin, A.: Neural Networks: Training, Models and Applications.
Radiotechnika, Moscow (2001) (in Russian).
12.
Turchenko, V.: Scalability of Parallel Batch Pattern Neural Network Training Algorithm.
Artificial Intelligence, the Journal of National Academy of Sciences of Ukraine. 2 (2009).
87
