
A NEW HYBRID GENETIC ALGORITHM FOR
MAXIMUM INDEPENDENT SET PROBLEM
Saeed Mehrabi
1
, Abbas Mehrabi
2
and Ali D. Mehrabi
3
1
Department of Computer Science, Shahid Bahonar University of Kerman, Kerman, Iran
2
Department of Computer Engineering, Islamic Azad University, South Tehran Branch, Tehran, Iran
3
Department of Mathematical and Computer Science, Yazd University, Yazd, Iran
Keyword: Algorithmic Graph Theory, Combinatorial Optimization, Maximum Independent Set Problem, Genetic
Algorithms.
Abstract: In recent years, Genetic Algorithms (GAs) have been frequently used for many search and optimization
problems. In this paper, we use genetic algorithms for solving the NP-complete maximum independent set
problem (MISP). We have developed a new heuristic independent crossover (HIX) especially for MISP,
introducing a new hybrid genetic algorithm (MIS-HGA). We use a repair operator to ensure that our
offsprings are valid after mutation. We compare our algorithm, MIS-GA, with an efficient existing
algorithm called GENEsYs. Also, a variety of benchmarks are used to test our algorithm. As the
experimental results show: 1) our algorithm outperforms GENEsYs, and, 2) applying HIX to genetic
algorithms with an appropriate mutation rate, gives far better performance than the classical crossover
operators.
1 INTRODUCTION
Genetic Algorithms (GAs), (Goldberg, 1989), are
search algorithms based on the mechanism of natural
selection and natural genetics. Recently, GAs have
frequently been used for solving many search and
optimization problems (see e. g. Hifi (1997),
Mehrabi and Mehrabi (2009a) or Mehrabi and
Mehrabi (2009b)). The basic concept of GA is
designed to simulate the processes in natural system
necessary for evolution, specifically for those that
follow the principle of survival of the fittest, first
laid down by Charles Darwin. The basic steps of a
GA, Bodenhofer (2003), are shown in Figure 1.
A Hybrid Genetic Algorithm (HGA) combines
some heuristic optimization techniques with a
classical GA. The most common form of HGA uses
this optimization phase to improve the strings
produced by genetic recombination. The resulting
improvements are then coded onto the strings
processed by the GA, Whitley (1995). Here, we use
these heuristics to 1) make feasible the single
offspring generated by crossover operator, and, 2)
ensure that the child solution produced after
mutation is valid regarding to MISP constraints.
1.1 The Maximum Independent Set
Problem
The maximum independent set problem can be
stated as follows:
Figure 1: The basic steps of a GA.
Definition 1. The maximum independent set
problem consists of finding the largest subset of
vertices of a graph such that none of these vertices
are connected by an edge. (i.e., all vertices are
independent of each other).
Also, a set V of vertices is said to be feasible if for
Genetic Algorithms Outline
Compute initial population P
0
;
WHILE stopping condition not fulfilled DO
BEGIN
select individuals for reproduction;
create offsprings by crossing individuals;
eventually mutate some individuals;
compute new generation;
END.
314
Mehrabi S., Mehrabi A. and D. Mehrabi A. (2009).
A NEW HYBRID GENETIC ALGORITHM FOR MAXIMUM INDEPENDENT SET PROBLEM.
In Proceedings of the 4th International Conference on Software and Data Technologies, pages 314-317
DOI: 10.5220/0002253403140317
Copyright
c
SciTePress

each i,j ∈ V : (i , j) ∉ E, where E is the edge set of
graph. The way in which the problem is encoded to
use genetic algorithm, is given in the next section.
In solving the maximum independent set
problem, we also have a solution for another graph
problem: The minimum vertex cover problem (exact
definition of this problem can be found in West
(2001), for example). The close relationship between
these problems is shown by the following Lemma
(see e.g. Papadimitriou and Steiglitz (1982)):
Lemma 2. For any graph G = (V , E) and V' ⊆ V,
the following statements are equivalent:
● V' is the maximum independent set in G.
● V – V' is the minimum vertex cover of G.
Consequently, one can obtain a solution of the
minimum vertex cover problem by taking the
complement of the solution to the maximum
independent set problem, (Hifi, 1997).
2 OUR HYBRID GENETIC
ALGORITHM
In this section, we will present our algorithm. We
just modified the basic GA described in previous
section in such a way that some heuristics is
considered. Our modified GA for MISP is as
follows:
2.1 Representation and Fitness
Function
The first step in designing a genetic algorithm for a
particular problem is to develop a suitable
representation scheme, that's, a way to represent
individuals in the GA population. The standard GA
0-1 binary representation (see e.g. Chu and Beasley
(2004) or Lio, Sakamato and Shimamoto (1997)), is
an obvious choice for MISP. Hence, we use an n-bit
binary string (called chromosome), where n is the
number of vertices in the underlying graph for
MISP. In this representation, a value 0 or 1 at the j
th
bit (called gene in GA literature) implies that j
th
vertex of graph is excluded or included in this
solution, respectively.
For unweighted MISP, there is a simple fitness
function that is used. As usual, (see e.g. Chu and
Beasley (2004) or Khuri and Bäck (1994)), we
define the fitness value of an individual, say S, in
GA population as the number of vertices in the
solution, that's:
∑
=
=
n
j
jSSf
1
][)( (1)
2.2 Parent Selection
Parent selection is the task of giving reproductive
opportunities to some or all individuals in the
population. Typically, in a GA we need to generate
two parents (according to some policies) who have
one or more children. There are many parent
selection methods in the GA literature, such as
roulette wheel (Goldberg, 1989), tournament
selection method (Chu and Beasley, 2004), steady
state selection and so on. Here, we used a steady
state like selection method, since in successive
generations only 50 % of the current population
changes.
2.3 Heuristic Independent Crossover
and Mutation Operators
Our heuristic crossover operator (HIX), which plays
an important role in our algorithm, can be divided in
two phases, as follows: suppose that two parents P
1
and P
2
are selected for crossover. At first phase, we
group up all vertices in either P
1
or P
2
into a
temporary set, say M, and sort them in increasing
order by their degrees in underlying graph. At
second phase, we generate our offspring by a simple
greedy approach as follows: successively selecting
lowest degree vertices first from M and setting
corresponding position to 1 in offspring until the
selected vertex can not add to the child solution. In
fact, selecting lower degree vertices first gives more
chance to other vertices to be included into the
solution, so improving the offspring reproductivity
in future generations. As we will see, this simple
greedy algorithm speeds up the convergence rate of
solutions to optimum solution. Figure 2 outlines the
Algorithm HIX.
2.4 Repair Operator
Clearly, the child solution produced by the mutation
operator may not be feasible, because the selected
vertices after mutation may not constitute an
independent set in graph. In order to guarantee
feasibility, a heuristic, called repair operator, based
on a simple greedy algorithm is applied. Since its
greedy approach activity is mostly like one that used
in crossover operator, along some subtle differences,
we don't mention it in a separate code fragment.
Instead, we give comments for differences.
A NEW HYBRID GENETIC ALGORITHM FOR MAXIMUM INDEPENDENT SET PROBLEM
315
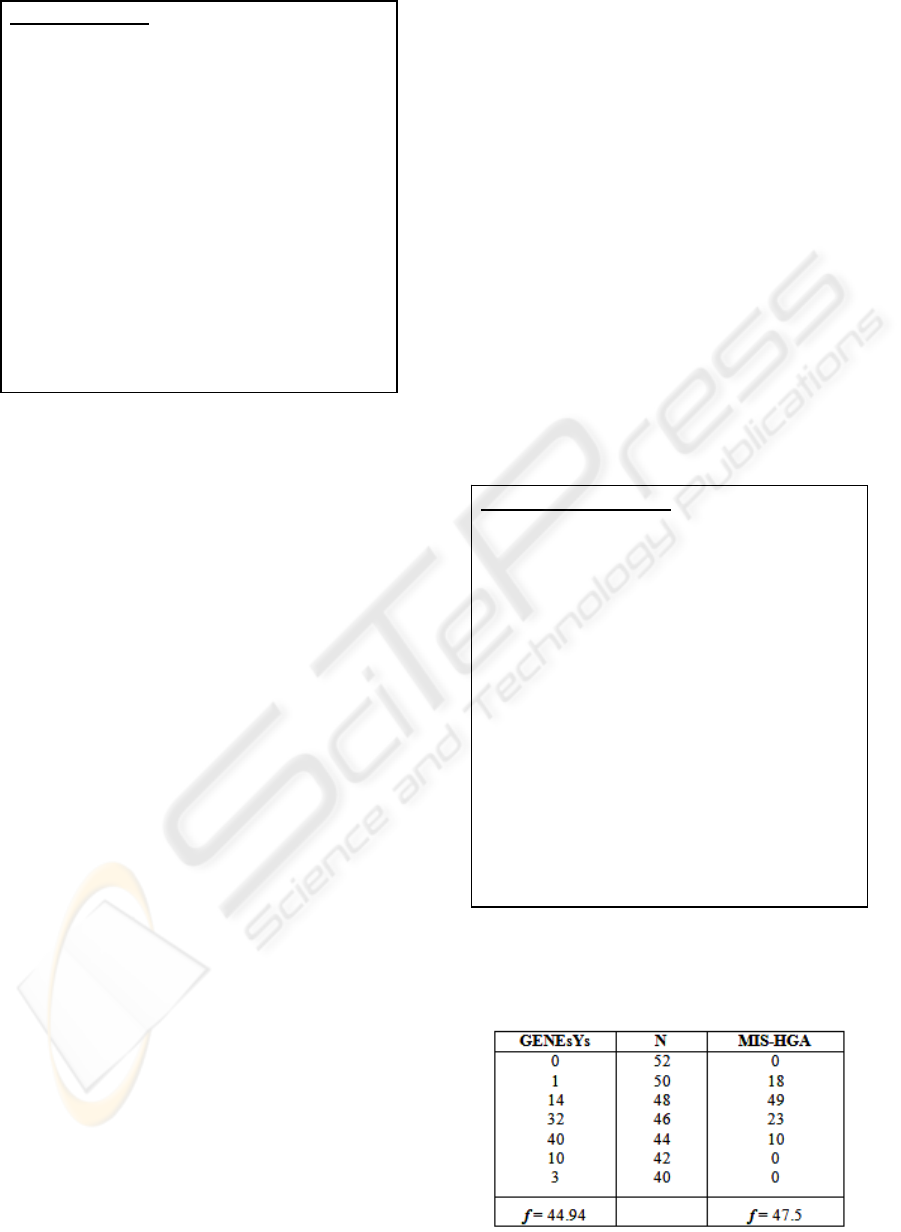
Figure 2: Heuristic independent crossover (HIX).
In repair operator algorithm, in a WHILE-DO loop,
we successively remove vertices, with the largest
degrees (in contrast to crossover operator) being
considered first, from the child solution until a
feasible solution is achieved. This simple greedy
approach guarantees to always produce a feasible
solution for MISP.
2.5 Algorithmic Outline
The outline of the GA heuristic which we have
developed for MISP is shown in Figure 3.
Note that, as shown in code fragment, in each
iteration of WHILE-DO we select the best (most
near to optimum) solution from the current
population and keep it and waiting for next
generation individuals, In order to update this value.
At end, we return the best solution from the last
generation.
3 EXPERIMENTAL RESULTS
For experiment, we have used population size µ ≤
20, because HIX converges faster to optimum
solution, so no far more population size is needed.
As we said earlier, our parent selection method is
like steady state one and we evaluated each
individual by formula (1). On each instance graph,
we have run our algorithm 100 times.
First, we have tested MIS-HGA with two
problem challenging instances presented in Khuri
and Bäck (1994), called "misp101" and "misp202",
and compared our results with an efficient algorithm
ones represented there, called GENEsYS. We got
surprising results compared to Khuri and Bäck
(1994). Due to our heuristic crossover (HIX): for
"misp101" and "misp202", our range of solution
quality has been reduced to from 44 to 50 and from
90 to 98 respectively, while this range varies from
40 to 50 and from 90 to 98 for corresponding
instances in Khuri and Bäck (1994), respectively.
More importantly, in the latter case, we got one
appearance of value 98 which is one step nearer to
optimum solution. Our results are compared with
Khuri and Bäck (1994) in Table 1 and Table 2. N
indicates the values obtained.
Then we have tested a variety of benchmarks
with various numbers of vertices and edge density.
These instances are online available from Sloane
(2009). Results are summarized in Tables 3, 4 and 5.
We can see, in most cases that we got the optimum
solution, except very a few instances (which are
challenging ones), in which we got very near to
optimum solutions consistently.
Figure 3: The outline of our proposed GA.
Table 1: Comparison of Back's results with MIS-HGA's
results for Graph "misp101" which has a MIS = 52. f
indicates the Average Fitness.
HGA:-Algorithm MIS
t ← 0;
initialize population P
t
randomly;
WHILE t < numOfGenerations DO
BEGIN
evaluate P
t
using fitness function;
keep ( bestFounSoFar );
select best 50 % individuals from P
t
and put
them in P
t+1
;
FOR m=0 TO µ STEP 2 DO
BEGIN
select m
th
and (m+1)
th
individuals from P
t
;
temp ← HIX (m , m+1 );
ofs ← Mutate (temp);
Repair (ofs) and put it on P
t+1
after repair;
END
t ← t + 1;
END
Return bestFoundSoFar from P
numOfGeneratins
;
Algorithm HIX:
V' = {};
S = {v
∈ V : v ∈ P
1
or v
∈
P
2
};
Sort S in increasing order by the degree of its
elements;
WHILE S has more vertices DO
BEGIN
Select next (lowest-degree) vertex, say v
1
, from
S. in case of that more than one such v
1
found,
select one which has more frequency in P
1
and
P
2
. Break ties randomly for this case. Remove
v
1
, and:
V' = V' ∪ v
1
;
S = S – { u : u is an adjacent vertex for v
1
};
END
Return V';
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
316
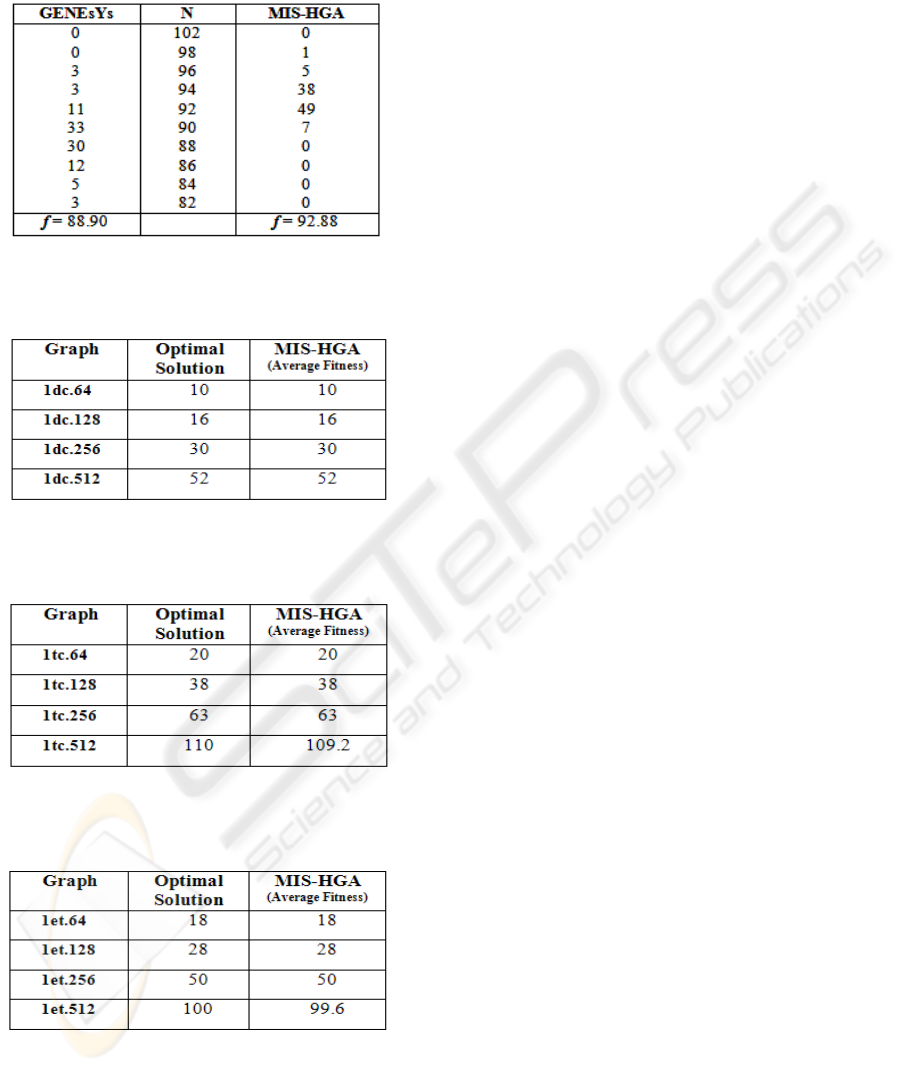
Table 2: Comparison of Back's results with MIS-HGA's
results for Graph "misp202" which has a MIS = 102. f is
defined as previous table.
Table 3: Experimental results obtained by MIS-HGA for
"1dc.*" graph instances. 100 runs of MIS-HGA are
performed.
Table 4: Experimental results obtained by MIS-HGA for
"1tc.*" graph instances. 100 runs of MIS-HGA are
performed.
Table 5: Experimental results obtained by MIS-HGA for
"1et.*" graph instances. 100 runs of MIS-HGA are
performed.
4 CONCLUSIONS
In this work, we have presented a hybrid genetic
algorithm for solving maximum independent set
problem. Most of the components of our GA are
comparable to those used in a standard GA. We have
demonstrated how a simple heuristic approach
applying to GAs can obtain far better results than
classical GAs. On a wide range of graph instances,
we have shown that the MIS-HGA is capable of
obtaining most high-quality solutions for problems
of various characteristics.
Our algorithm was directly compared with an
efficient existing evolutionary heuristic, called
GENEsYs, which is based on genetic algorithms.
Computational results show that the MIS-HGA gave
far superior quality solutions than this algorithm.
REFERENCES
Bodenhofer, U.: (2003) "Genetic Algorithms: Theory and
Applications". Lecture Notes. 3
rd
edition.
Chu, P. C., Beasley, J. E.: (2004) "A Genetic Algorithm
for Set Covering Problem". European Journal of
Operational Research 94, 392-904.
Goldberg, D. E.: (1989) "Genetic Algorithms in Search,
Optimization and Machine Learning". Massachusetts:
Addison Wesley.
Hifi, M.: (1997) "A Genetic Algorithm-based Heuristic for
Solving the Weighted Maximum Independent Set and
Some Equivalent Problems". J. of Operational Research.
Holland, J. H.: (1992) "Adaptation in natural and artificial
systems". MA: MIT Press.
Khuri, S., Bäck, Th.: (1994) "An Evolutionary Heuristic
for the Maximum Independent Set Problem". In
proceedings of the IEEE Conference on Evolutionary
Computation, vol. 2, 531-535.
Lio, X., Sakamoto, A., Shimamoto, T.: (1997) A Genetic
Approach for Maximum Independent Set Problems".
IEIC Transactions on Fundamentals of Electronics,
Communications and Computer Sciences, No. 3 pp.
551-556.
Mehrabi, S., Mehrabi, A.: (2009a) "A New Genetic
Algorithm for Multiprocessor Scheduling Problem",
(in Persian). In Proc. of the National Conference on
Software Engineering (NSEC'09), Tehran, Iran.
Mehrabi, A., Mehrabi, S.: (2009b) "A Genetic Algorithm
for Multiprocessor Task Assignment Problem with
Limited Memory". 14
th
International CSI Symposium
on Intelligent Systems and Soft Computing
(CSICC2009), Tehran, Iran. Submitted.
Papadimitriou, C. H., Steiglitz, K.: (1982), "Combinatorial
Optimization: Algorithms and Complexity". Prentice Hall.
West, D. B.: (2001) "Introduction to Graph Theory".
Prentice Hall, Inc.
Whitley, D.: (1995) "Modeling Hybrid Genetic
Algorithms", Genetic Algorithms in Engineering and
Computer Science. Wiley, 1995.
Neil J. A. Sloane.: (2009) Challenge Problems: Inde-
pendent Sets in Graphs, online available at: http://
www.research.att.com/~njas/doc/graphs.html
A NEW HYBRID GENETIC ALGORITHM FOR MAXIMUM INDEPENDENT SET PROBLEM
317
