
EFFICIENT SIMULATION OF THE FLUID-STRUCTURE
INTERFACE
Luis Gerardo de la Fraga
1
, Ernesto Olgu
´
ın-D
´
ıaz
2
and Fernando Garc
´
ıa-Arregu
´
ın
1
1
Computer Science Department, CINVESTAV, Av. I.P.N. 2508. CP 07360, M
´
exico City, M
´
exico
2
Rob
´
otica y Manufactura Avanzada, CINVESTAV, Carr Saltillo-Monterrey Km 13.5 CP 25900, Saltillo, M
´
exico
Keywords:
Fluid-structure simulation, Haptics.
Abstract:
In this work, an alternative method to simulate fluid interactions with compliant surfaces is described. The
simulation of the fluid phenomena is performed by the Smooth Particle Hidrodynamics (SPH) method. In
the normal SPH method, solid interfaces are modeled with sets of static particles covering the boundaries. In
the proposed alternative method, a compliant-solid interface is modeled as a polygon allowing to substitute
the particles that represent a surface in the normal SPH method. Therefore, by considering less particles, a
simplification on simulations is achieved, and the alternative method still describes the general behavior of the
phenomena. Furthermore, a deformable object, this is, a time variant object, can be modeled as a polyhedron,
with a mass-spring-dashpot system in each of its edges, and with each polygon as a compliant-solid interface.
Bidirectional dependence on the alternative method for fluid simulation and the deformable model gives a new
method for the simulation of compliant solids partially or fully immersed in an incompressible fluid. This
new method is not intended to have a high accuracy in the numerical results but to have a perceptual high
qualitative behavior and fast numerical response, to be applied in visual/haptic simulators.
1 INTRODUCTION
Understanding the dynamic of fluids has been a quest
for many engineers and physicists mainly because its
knowledge can help in the design process of many
fluid applications such as hydroelectric dams (chuan
Bai et al., 2007), water supply nets (Chen et al., 1995),
aerodynamics of an aircraft (Eddy et al., 2006) or the
behavior of an alien corp in blood stream of a patient
(Tai et al., 2007). Some of these problems have been
solved with approximate solutions of the well known
Navier-Stokes equations, which describe with partial
equations the behavior of a fluid under specific cir-
cumstances.
When the interaction of the fluid with a solid
structure needs to be computed (for the case of the
container or an object inside it) the problem becomes
even more complicated due to the fact that the bor-
der conditions on the partial differential equations are
dependent on time. The complexity of these partial
differential equations plus the geometric complexity
of volume containing the fluid lead to very complex
and large amount of simultaneous equations that can
only be solved approximately using numerical solu-
tions, and finite element methods. This problem is
known in the literature as the Fluid-Structure problem
One possible, yet very expensive, way of compute the
overall solution can be that of computing the conser-
vation of momentum for every particle in the fluid and
apply Newton’s second law. The big problem with
this approach is that there become too many simulta-
neous equations to solve three dimensional variables
(interaction forces between the particles) plus the time
varying border conditions of the working volume. So
even when this method may lead to more accurate so-
lutions, it is impractical for online –realtime– calcu-
lations. Fluid dynamics simulations used in haptics
(kinesthetic feedback to the user) need faster numeri-
cal solutions but preserving the qualitative behavior of
the fluid physical system, not only within the fluid but
also with the container or bodies moving along. The
big problem reduces to how the Navier-Stokes equa-
tions can be simplified to still represent, with some
degree of accuracy, the fluid dynamic so that a com-
mon computer would be able to calculate the algo-
rithm fast enough to be used in real time applications.
We propose a system where the fluid dynamics
is solve with the Smoothed Particle Hydrodynamics
algorithm (SPH) (Monaghan, 2005), and the border
effects are solved by a compliant model composed
268
Gerardo de la Fraga L., Olguín-Díaz E. and García-Arreguín F. (2009).
EFFICIENT SIMULATION OF THE FLUID-STRUCTURE INTERFACE.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 268-273
DOI: 10.5220/0002211702680273
Copyright
c
SciTePress

by plane surfaces. We are using a deformable model
composed by simplex meshes and a simple mechani-
cal system in every edge on the mesh (Trejo and de la
Fraga, 2005). The contribution of this work lies in the
fluid-structure interface modeling that is used in the
SPH as forces on the particles at the borders and as
pressure in every mesh face. Equivalences between
forces and pressures are given by the time varying
known areas of the mesh faces.
This paper is organized as follow: in Sec. 2 the
SPH method to model a fluid is described. In Sec. 3
the model of a compliant body and the way how it is
integrated with the SPH to build the complete simu-
lator are presented. In Sec. 4 the implementation of
the simulator is discussed and some results presented.
Finally, Sec. 5 presents the conclusions of this work.
2 FLUID DYNAMIC MODELING
USING SPH
SPH use a Lagrangian approximation to the fluid me-
chanics in the context that it calculates the evolution
of variables associated with the particles within the
fluid, instead of inertial referenced positions (as done
in the Euler method). This is the strongest character-
istic of the method.
In order to explain the SPH method, we can start
with the continuity equation, which refers to the parti-
cle’s mass in the form of density (Streeter and Wylie,
1988):
d
dt
ρ = −∇ · ρv (1)
The particle’s acceleration is given by the pres-
sure’s gradient as
d
dt
v = −
1
ρ
∇p, where v is the ve-
locity if particle (v =
d
dt
r =
˙
r) and r stands for the
position of the fluid particle. By using the chain rule
of ∇
p
ρ
=
∇p
ρ
−
p
ρ
2
∇ρ, particle’s acceleration can be
written as
d
dt
v = −∇
p
ρ
−
p
ρ
2
∇ρ, (2)
On the other hand, the interpolation function
h f (r)i =
Z
D
f (r
0
)W
r,h
(r
0
)dr
0
∼
=
N
∑
j=1
f (r
j
)W
r,h
(r
j
)V
j
(3)
is the Monte Carlo numerical integration of equation
h f (r)i =
R
D
f (r
0
)W
r,h
(r
0
)dr
0
in order to obtain discrete
points from the information of finite set of known
points r
j
. The function h f (r)i is the average of func-
tion f (r) around point r, where D is the domain of
this function, W(r) is the kernel and V
j
is the volume
of point r
j
.
Using (3) in (2), a particle’s movement equation is
obtained as (P
´
erea et al., 2005):
d
dt
v = −
∑
j
m
j
p
i
ρ
2
i
+
p
j
ρ
2
j
+ Π
i, j
∇
i
W
i, j
+
¯
f
i
(4)
Two terms are added in (4): the first is an arti-
ficial viscosity Π
i, j
, which is a dissipation term that
should tend to decrease the kinetic energy of the par-
ticles when no external forces are acting on the set
of particles. The second term is indeed the external
force,
¯
f
i
, applied to every particle i.
Densities are calculated as:
d
dt
ρ
i
=
∑
j
m
j
v
i, j
· ∇
i
W
i, j
(5)
where v
i, j
, v
i
−v
j
is the relative velocity of particles
i and j.
Kernel. The kernel function determines the interac-
tion among the different particles of the fluid. Each
particle interacts only with its nearest neighbor par-
ticles, inside its influence zone. We use B-splines
(Monaghan and Lattanzio, 1985) defined as:
W
i, j
(r
i
,r
j
,h) ,
C
1 −
3
2
q
2
+
3
4
q
3
, if 0 ≤ q < 1
C
1
4
(2 − q)
3
if 1 ≤ q < 2
0 otherwise
(6)
where h is a half of the influence radio, q = r
i, j
/h is
the normalized distance r
i, j
, and this last one is the
magnitude of the relative position of particles i and j
as r
i, j
= kr
i, j
k, where k · k stands for the norm of any
vector, i.e: kak =
q
a
2
x
+ a
2
y
+ a
2
z
and r
i, j
= r
i
− r
j
.
The constant parameter C is equal to 2/(3h) for one
dimension, 10/(7h
2
) for 2D and 1/(πh
3
) for 3D.
Artificial Viscosity. The main purpose of the artifi-
cial viscosity term in equation (4) is to avoid the pres-
ence of oscillations or nonphysical collisions in the
simulation procedure. It is calculated as:
Π
i, j
,
(
−α ¯c
i, j
µ
i, j
+βµ
2
i, j
¯
ρ
i, j
for v
i, j
· r
i, j
< 0;
0 otherwise
(7)
where µ
i, j
,
hv
i, j
·r
i, j
r
i, j
2
+0.001h
2
is a normalized version of the
relative velocity between two particles, with an artifi-
cial term in order to avoid numerical ill conditioning;
¯
ρ
i, j
, (ρ
i
+ ρ
j
)/2 is the average of densities of the
two particles; and ¯c
i, j
, (c
i
+ c
j
)/2 is the average of
sound’s velocity due to their different density. The
constants α and β stand for the laminar and turbulent
EFFICIENT SIMULATION OF THE FLUID-STRUCTURE INTERFACE
269

flow dissipation and according to (Monaghan, 1994)
they take values of 0.1 − 0.01 and 0, respectively.
To use SPH with incompressible fluids, slightly
compressibility must be considered to allow dynamic
simulation of these fluids. This is achieved consider-
ing the atmospheric pressure negligible as:
p = B
ρ
ρ
0
γ
− 1
(8)
where ρ
0
is a reference density (e.g. for water is
1000). This relationship is known as the state equa-
tion (which in this context refers to the physical phase
of the fluid and not to the dynamic state as usually re-
ferred in control engineering jargon).
If constants γ and B are high enough (for example,
take 7 and 3000 respectively), state equation (8) com-
putes constrained variation on pressures (under 10
5
atmospheres for water in the example). In this case,
sound’s velocity is sufficiently high and variations in
the relative density are small:
|δρ|
ρ
≈
v
2
c
2
s
(9)
where v is the maximum fluid velocity. Moreover,
if v/c
s
< 0.1, it can be assumed that |δρ|/ρ ≈ 0.01.
In this case, sound’s velocity can be calculated as
c
2
s
= (γB)/ρ
0
. Thus, if B = 100ρ
0
v
2
/γ, then the vari-
ations on the relative velocity can take values of the
order of 0.01. The calculations finish by approximat-
ing the maximum fluid velocity by v
2
= 2gH, where
g is the gravity constant and H is the fluid’s working
area (Monaghan, 1994).
3 COMPLIANT SOLID
MODELING
In contrast with rigid bodies, compliant solids can not
be represented by dynamical lumped equations. This
means that the order of the time varying dynamical
equation should be infinite. Reduction of the order
of this type of equations, for practical simulation pur-
poses, yields to the so called Finite Element Meth-
ods (FEM). These methods consist basically in dis-
cretisize the body on a finite number of small simple
mechanical models. Then a set of simultaneous but
not so complex equations may be solve by different
numerical methods. The new problem is then deter-
mined by the border or boundary conditions that exist
in the new compliant solid.
In the next paragraphs, we propose a new method
to calculate these boundary conditions.
3.1 Modeling with Simplex Meshes
Simplex meshes are used to represent surfaces in the
three-dimensional space. These meshes have similari-
ties with triangulations, in fact a 2-simplex mesh is the
topological dual of the triangulation, but they are not
geometric duals. This means that, we can not build a
geometric transformation between triangulations and
simplex meshes. An important property of simplex
meshes is their constant vertex connectivity: each ver-
tex in the mesh has three and only three neighboring
vertices. This condition allows to use the same de-
formation engine to solve four differential equations
for the four mass-spring-dashpot systems attached on
each simplex. In addition, it has the advantage that
allows smooth deformations in a simple and efficient
manner. In this work we used the model of a sphere
built as is presented in (Flores and de la Fraga, 2004).
A surface made with simplex meshes can be visu-
alize it as a mesh of hexagons, and it is easy to rep-
resent each hexagon with four triangles. Then, each
triangle can be modeled as a single compliant solid
surface. The result is a compliant solid body with ar-
bitrary three-dimensional geometry.
3.2 Fluid Particles Interaction
The interaction of a fluid particle and a surface can be
modeled by the interaction forces or pressures. The
same force, in opposite sense, is exerted by the sur-
face to the particle.
The contact force that the surface exert to the par-
ticle can be modeled in two orthogonal components as
f
c
= f
d
+ f
f
∈ R
3
, where f
d
is the deformation force
due to the elastic stresses and mechanical deformation
of the body surface and in this work is considered to
be strictly perpendicular (normal) to the surface. The
friction component f
f
is considered to be strictly tan-
gential to the surface.
The Normal Operator. Lets be s(x,y,z) = 0 the
function in the Euclidean space defining the sur-
face with whom the particle is contact at point r
c
=
(x
c
,y
c
,z
c
)
T
, where the variables x
c
,y
c
and z
c
are the
Cartesian coordinates of the contact point. The unit
vector λ
N
∈ R
3
is defined as the normalized gradient
of the surface at point p
c
:
λ
N
,
∇s(p
c
)
k∇s(p
c
)k
(10)
The deformation can be calculated as the nor-
mal component at the relative position of the particle
r(x,y,z) with respect to the contact point at the sur-
face x , r − p
c
∈ R
3
. The normal component x
N
is
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
270

obtained from the next equation
x
N
= Nx (11)
where the Normal Operator N is defined as
N , λ
N
λ
T
N
(12)
The normal component of the relative velocity can
be calculated using the Normal Operator N as
˙
x
N
= λ
N
λ
T
N
˙
x (13)
where
˙
x = v −
˙
p
c
, is the relative velocity between the
particle and the surface, v and
˙
p
c
are the linear ve-
locities of the particle and the contact point of a rigid
surface, respectively
1
.
The Tangential Operator. As well as for the nor-
mal component of the deformation or velocity to the
surface, a linear operator T : R
3
7→ R
3
shall exist that
gives the tangential projection of these vectors. This
Tangential Operator must be of the form
˙
x
T
= T
˙
x (14)
In the same way that Normal Operator has been
defined in (12), The Tangential Operator is :
T , λ
T
λ
T
T
(15)
where λ
T
stands for any unit vector tangent to the sur-
face s at point p
c
. One possible way is defining it in
the direction of the tangent velocity as:
λ
T
,
˙
x
T
k
˙
x
T
k
(16)
By construction, operators N and T shall be or-
thogonal complements and fulfill next properties
NT = T N = [0], and N + T = I (17)
Then the Tangential Operator defined as
T = −[λ
N
×]
2
(18)
fulfill properties (17), where the operator [a×] stands
for the matrix representation of the cross product: a ×
b = [a×]b.
Deformation Normal Force. This force, normal to
the surface can be modeled as a simple second order,
hence continuous system, from the compliant model
of the surface. That is, the normal force exerted by a
particle of mass m
p
, when colliding with a surface s
at point p
c
with velocity
˙
x is given by the following
equation
f
p
= k
s
x
N
+ b
s
˙
x
N
(19)
1
Note: If the surface is considered uncompliant and with
no movement, velocity at the contact point is null, ˙p
c
= 0
where the constant k
s
is the elastic modulus of the sur-
face material, b
s
is an artificial damping coefficient
and variables x
N
and
˙
x
N
are the normal projections of
the relative position and velocity respectively of the
particle in the contact point.
By Newton’s laws, the reaction force, i.e. the one
felt by the particle and induced by the surface is
f
d
= −
h
λ
N
λ
N
T
i
(k
s
x + b
s
˙
x) (20)
In order to simulate a non absorbent material, the
artificial damping coefficient b
s
should be chosen suf-
ficiently small with the restriction b
s
<< 2
p
k
s
m
p
.
Friction Tangential Force. This force can be mod-
eled by a simple Coulomb friction as
f
f
= µ
k
kf
d
k(−λ
T
) (21)
where µ
k
is the dynamic friction coefficient between
the particle and the contact surface. The f
f
direction
is given by the unit tangent vector if it is defined as in
(16). Then, equation (21), can be rewritten as:
f
f
= −µ
k
kf
d
k
˙
x
T
k
˙
x
T
k
(22)
where
˙
x
T
is calculated by (14).
3.3 Integration
The sum of the deformation force (20) and the friction
one (22) is the total contact force f
c
that each particle
feels when colliding with a surface. It shall be nor-
malized by the particle’s mass in order to be included
in equation (4).
To be included in the model of the compliant body
made up of simplex meshes the forces of all the par-
ticles that collide with a specific planar surface (a tri-
angle in our case) are added and then normalized by
the area of that triangle in order to include these inter-
face forces as border pressure. The resulted force is
applied at the three triangle’s vertices.
4 IMPLEMENTATION DETAILS
The next algorithm shows our implemented SPH
method:
1: Set initial time, t ← t
0
,
2: Set time increment ∆,
3: Set stop time, T ← t
f
,
4: while t ≤ T do
5: for all p
i
particle do
6: Find the neighbor particles to p
i
, using (6).
7: Calculate the acceleration with (4), and
EFFICIENT SIMULATION OF THE FLUID-STRUCTURE INTERFACE
271
8: Calculate the density change for p
i
using
continuity expression (5).
9: For each particle, update its position, velocity
and density, using leapfrog numerical method.
10: For each particle, calculate its pressure (8).
11: t+ = ∆
The most time consuming step is finding the
neighbor particles to the given one in line 6 of the SPH
algorithm, which is the calculation of equation (6).
For n particles, (n)(n − 1)/2 calculations of distance
among each particle pair must be performed. There-
fore, to reduce the execution time in the 3D simula-
tions, we create a grid of cubes of size 2h × 2h × 2h.
In each cube there is a list of belonging particles.
When a particle moves, its indexes are recalculated to
a new position, and the particle is moved to the corre-
sponding list. In this manner, we reduce the search of
neighbors of the whole set of particles into a neigh-
borhood of 26 cubes around the given one. However,
the neighbor finding algorithm is still of complexity
O(n
2
); this part of the algorithm could be improved
with more complex data structures.
For locating if a particle it is inside the kernel, the
workplace, or in a side of a plane, we use a simple col-
lision detector which consists in testing the sign of the
value given by the implicit equation of the interface.
For the deformable object we use SOLID collision
detector (van den Bergen, 2004), which it is optimized
to calculated the collision among a ray and a set of
triangles.
4.1 Results
We perform two experiments to test our simulator.
The first experiment is a classical simulation of rup-
ture of a dam. The second experiment is a deformable
sphere inside a tube in which is circulating an incom-
pressible fluid. We are going to describe in detail each
experiment.
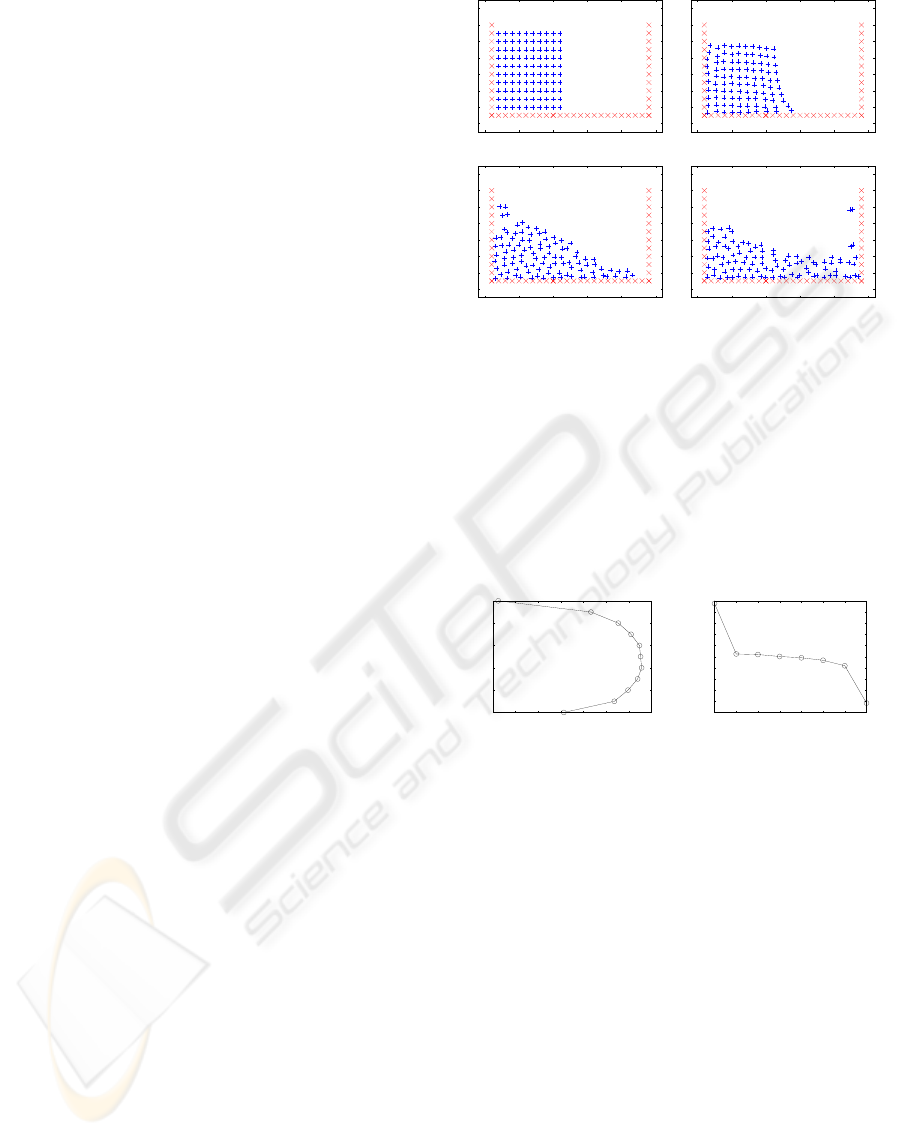
We performed the first experiment with border
particles in order to test our SPH implementation. In
Fig. 1(a), we can see the initial state of the dam. The
working space is made up with the static particles
marked as “×”. The set of particles marked with “+”
form the incompressible fluid. A border to the right of
the fluid (the dam’s border) is removed at time t
0
. All
fluid’s particles suffer a gravity force. In Fig. 1(b)-
(d) we can see the carried simulation. The simulation
works as expected, and it is similar to the showed in
(Monaghan, 1994).
The second experiment uses compliant simplex
meshes surfaces to model a tube where an incom-
pressible fluid is running and the surface of a de-
formable sphere is placed inside the moving fluid.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.5 1 1.5 2 2.5
Y
X
(a) t = 0 sec
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.5 1 1.5 2 2.5
Y
X
(b) t = 0.1562 sec
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.5 1 1.5 2 2.5
Y
X
(c) t = 0.3125 sec
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.5 1 1.5 2 2.5
Y
X
(d) t = 0.4587 sec
Figure 1: Simulation of a dam’s rupture.
The fluid moves by the action of an horizontal force
equal to the gravity force. It is difficult to check by
visualization that the simulation is running ok in this
scenario. Thus, values along the fluid are taken: the
average particle velocity through a transverse tubes’
section, and the average pressure through longitudi-
nal tubes’ sections. These values are shown on Fig. 2,
and we can see that simulation’s results are correct.
0
2
4
6
8
10
5 6 7 8 9 10 11 12
Transverse tubes’ sections
Velocity (m/s)
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
1 2 3 4 5 6 7 8
Pressure (Pa)
Longitudinal tubes’ sections
Figure 2: Left curve shows the variation of the mean ve-
locity (horizontal axis) taken at a transverse section of the
tube (vertical axis). Right curve shows the average pressure
(horizontal axis) along the tube (horizontal axis).
Finally, in Fig. 3, we see several views of the sim-
ulation of the deformable sphere inside the fluid. The
deformable surface takes the form of an ovoid, as it is
expected.
5 CONCLUSIONS
We developed a fluid dynamics simulator based in the
Smooth Particle Hydrodynamics method plus the use
of compliant bodies modeled with simplex meshes.
The interface interaction has been modeled by orthog-
onal forces produced by each particle colliding with
the surface and simple models of 2
nd
order compliant
deformation and Coulomb friction.
We can simulated containers or deformable ob-
jects contact with slightly compressible fluids. Our
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
272

t = 0 sec t = 0.33 sec
t = 0.66 sec t = 0.99 sec
t = 1.98 sec t = 2.31 sec
Figure 3: Simulation of a deformable sphere immerse in a
fluid contained within a tube.
simulator uses a simplified model of a compliant body
that allows fast computations. Our simulator can be
used in visualization of a real phenomena like to cut a
vein and to show how the blood fluids.
We showed bidimensional simulations of the rup-
ture of a dam and a three-dimensional simulation of a
compliant sphere completely immersed in a running
incompressible fluid inside a tube. The results simu-
late qualitative behaviors of the proved systems.
We are convinced that our method can be used as
a first approximation, or to show graphically the be-
havior, of partial immersed bodies on compressible or
incompressible fluids, like ships or submarines at the
see surface.
Also, the forces produced in immersed complex
mechanism, like robot arms attached to a ROV (Re-
motely Operated Vehicle) can be better understood if
more accurate hydrodynamical damping models can
be obtained. This method can be a good approach to
this end.
Finally, some work has to be done yet to reduce
the computational cost when a complex deformable
model is used, in order to obtain real time simulations.
ACKNOWLEDGEMENTS
This work has been partially supported by project
SEP-CONACyT 80965, M
´
exico.
REFERENCES
Chen, S., Johnson, D. B., and Raad, P. (1995). Velocity
boundary conditions for the simulation of free surface
fluid flow. Journal of Computational Physics, Volume
116(Issue 2, February):262–276.
chuan Bai, Y., Xu, D., and q. LU, D. (2007). Numerical sim-
ulation of two-dimensional dam-break flows in curved
channels. Journal of Hydrodynamics, Ser. B, Volume
19(6):726–735.
Eddy, P., Natarajan, A., and Dhaniyala, S. (2006). Subisoki-
netic sampling characteristics of high speed aircraft
inlets: A new cfd-based correlation considering in-
let geometries. Journal of Aerosol Science, Volume
37(Issue 12, December):1853–1870.
Flores, J. R. and de la Fraga, L. (2004). Basic three-
dimensional objects constructed with simplex meshes.
In First International Conference on Electrical and
Electronics Engineering, pages 166–171. IEEE Pres.
Monaghan, J. and Lattanzio, J. (1985). A refined method
for astrophysical problems. Astron. Astrophysics,
149:135–143.
Monaghan, J. J. (1994). Simulating free surface flows with
sph. Journal of Computational Physics, 110:399–406.
Monaghan, J. J. (2005). Smoothed particle hydrodynamics.
Rep. Prog. Phys., 68:1703–1759.
P
´
erea, S. A., Gonz
´
alez, F. F., and Iglesias, A. S. (2005). Uti-
lizaci
´
on del m
´
etodo sph en la simulaci
´
on del sloshing.
Technical Report No. 822, Universidad de la Rioja.
Streeter, V. L. and Wylie, E. B. (1988). Fluid Mechanics.
Mc. Graw Hill.
Tai, C. H., Liew, K. M., and Zhao, Y. (2007). Numer-
ical simulation of 3d fluid-structure interaction flow
using an immersed object method with overlapping
grids. Computers & Structures, Volume 85(Issues 11-
14, June-July):749–762.
Trejo, C. R. and de la Fraga, L. G. (2005). Animation of de-
formable objects built with simplex meshes. In Second
International Conference on Electrical and Electron-
ics Engineering, pages 36–39. IEEE Pres.
van den Bergen, G. (2004). Collision Detection in Interac-
tive 3D Environments. Morgan Kaufmann.
EFFICIENT SIMULATION OF THE FLUID-STRUCTURE INTERFACE
273
