
AUTOMATIC APPROACH FOR RECTIFYING BUILDING
FACADES FROM A SINGLE UNCALIBRATED IMAGE
Wenting Duan and Nigel M. Allinson
The Department of Electronic and Electrical Engineering, The University of Sheffield
Mappin Street, Sheffield, U.K.
Keywords: Facade rectification, Vanishing point estimation, Line grouping, Building recognition.
Abstract: We describe a robust method for automatically rectifying the main facades of buildings from single images
taken from short to medium distances. This utility is an important step in building recognition,
photogrammetry and other 3D reconstruction applications. Our main contribution lies in a refinement
technique for vanishing point estimation and building line grouping, since both significantly affect the
location and warping of building facades. The method has been shown to work successfully on 96% of
images from the Zubud-Zurich building database where images frequently contain occlusions, different
illumination conditions and wide variations in viewpoint.
1 INTRODUCTION
The rectification of main building facades to their
fronto-parallel view is of importance in building
recognition, photogrammetry and other 3D
reconstruction applications (Wang et al., 2005). It
can simplify the extraction of metric information and
recover the canonical shape of a building because
the metric rectification allows the scene to be
warped-back using a similarity transformation. In
other words, the rectified view is almost free from
perspective distortion. It should be noted that the
rectification problem addressed here is different
from image rectification for stereo vision, where the
purpose is to match the epipolar projections of
image pairs (Hartley, 1999). How to rectify a single
uncalibrated image is a different challenge; and
various approaches having been proposed and
studied.
As pointed out by Menudet et al. (2008),
“camera self-calibration is intrinsically related to
metric reconstruction”. Therefore, an important
factor for rectification lies in obtaining accurate
calibration parameters and inclusion of appropriate
scene constraints. Menudet et al. (2008) described a
new way of decomposing the scene-to-image
homography, which allows a cost function to assess
how close the rectification is to similarity. However,
to obtain the calibration parameters, at least four
images of the same scene were required. Using only
a single image of a particular scene, Liebowits and
Zisserman (1998) utilised some geometric
constraints such as equal angles for rectification.
Chen and Ip (2005) achieved rectification by using
the vanishing line and an arbitrary circle extracted
from the image to estimate the image of the absolute
conic (IAC). In the context of rectifying building
images, reliable geometric features such as parallel
lines and orthogonal angles can be used as scene
constraints (Hu, Sawyer and Herve, 2006; Robertson
and Cipolla, 2004; David, 2008; Košecká and Zhang,
2005). The estimation of the vanishing line is a
major technique to recover images from perspective
distortion. Hence, improving the accuracy and
efficiency of computing these vanishing points is of
foremost interest. Košecká and Zhang (2002)
proposed a technique of applying the EM algorithm
to detect vanishing points for images taken in
man-made environments. The method achieved
good accuracy with vanishing points being detected,
on average, within 5 pixels of their true position.
However, for building facade rectification, the
following factors can adversely affect the success
rate of detecting vanishing points. Firstly the images
of the building can be taken in different illumination
conditions and from different viewpoints. Secondly
occlusion and scene clutter can obscure the building
image. Finally, not all buildings have facades that
are orthogonal to each other. These issues have not
37
Duan W. and Allinson N. (2009).
AUTOMATIC APPROACH FOR RECTIFYING BUILDING FACADES FROM A SINGLE UNCALIBRATED IMAGE.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 37-43
DOI: 10.5220/0002191600370043
Copyright
c
SciTePress
(a) (b) (c)
(d) (e)
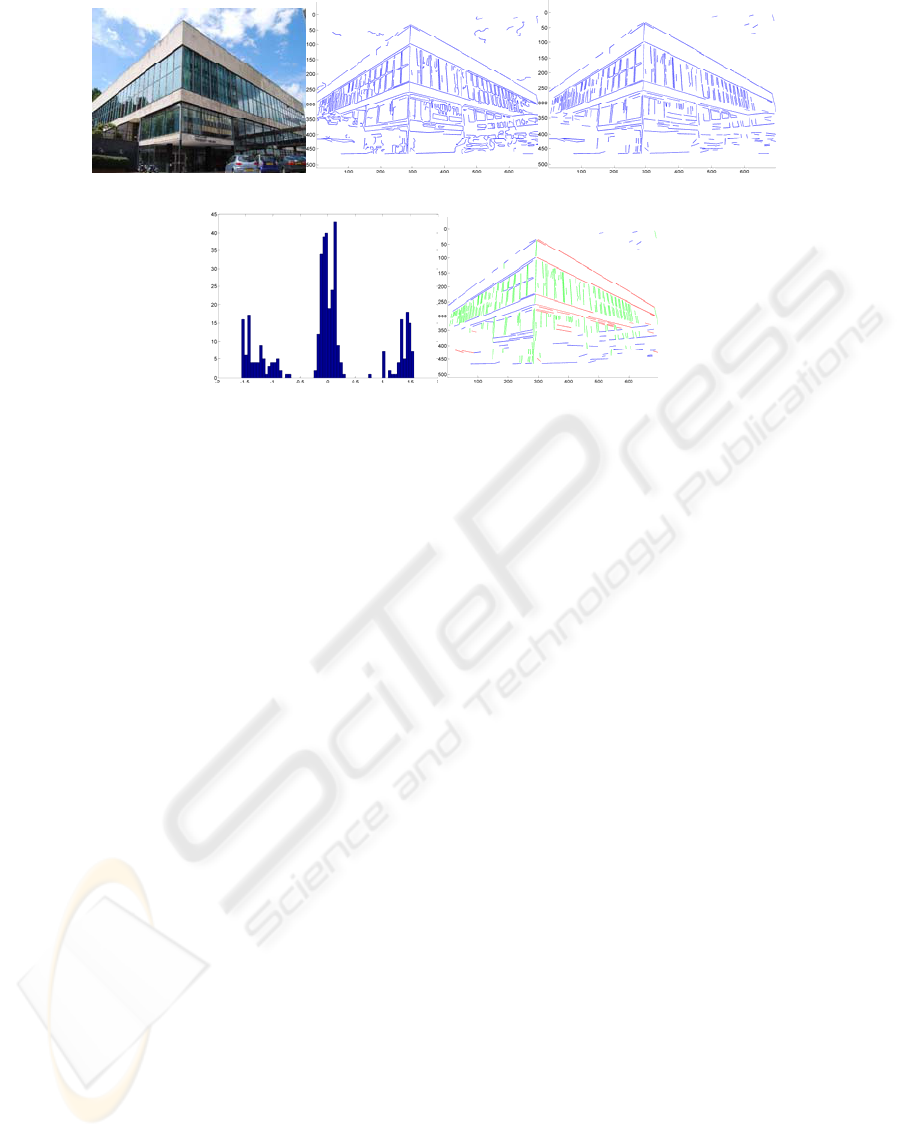
Figure 1: (a) Original Image (700×468 pixels) – Main Library of Sheffield University; (b) Line segments fitted to the
connected edge points; (c) Line segments with length > 15 selected; (d) Histogram of line segment directions; (e) Separated
groups of line segments associated with the three principal directions.
been considered by existing methods for building
rectification, and for this reason it is desirable to
develop more robust methods that can handle these
potential problems.
In this paper, we first present a method based on
Expectation-Maximisation (EM) algorithm for
estimating the vanishing points of building images.
Then, we show how to use the appropriate scene
constraints appeared in the image to enable
automatic rectification of the main building facades.
The approach is described in Section 2. In Section 3,
the results are presented and compared to Košecká
and Zhang’s work (2002). Finally, we draw some
conclusions.
2 METHOD
2.1 Line Segments Detection and Initial
Grouping
Lines, derived from local intensity edges, in building
images contain significant and stable geometric
information because the majority are aligned to the
three principal axes. These three axes are associated
with the 3D orthogonal real-world axes. Under
perspective transformation, the parallel lines of
buildings intersect at vanishing points in the image
(though the actual vanishing points may be outside
the area of the captured scene). Hence, first of all,
we need to find those groups of lines that are
associated with these vanishing directions. A
conventional Canny edge detector was used to find
edge strength and orientation followed by
non-maximum suppression. Hysteresis thresholding
was then used to further refine the recovered edges.
We applied the edge-linking function (Kovesi,
2000-2006) to the detected edges to label connected
edge points. The linked points with a length under
15 pixels were discarded since these lengths were
determined experimentally to be inconsequential for
our image sizes (typically 700×468 pixels). A
line-fitting scheme was then utilised to form straight
line segments from these linked edges. At this stage,
a line segment list was produced, which contains the
end point coordinates of all the computed line
segments in the image coordinate frame. A typical
example is shown in Fig. 1(b).
In Fig. 1(b), we can easily see that most short
line segments belong to the background or general
scene clutter. The many short ones belonging to the
building are also not reliable. Hence, the length of
each segment was calculated and again ones longer
than 15 pixels were selected. This small step also
enables us to roughly segment the building region
from the whole scene (Fig. 1(c)). The directions of
all the lines were calculated in order to compute the
histogram shown in Fig. 1(d). The top peaks which
are at least five bins apart were selected after curve
fitting to the histogram. The lines which have
orientation within the range of +/-π/8 around a
particular peak were included in the same group.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
38

(a) (b) (c)
(d) (e) (f)
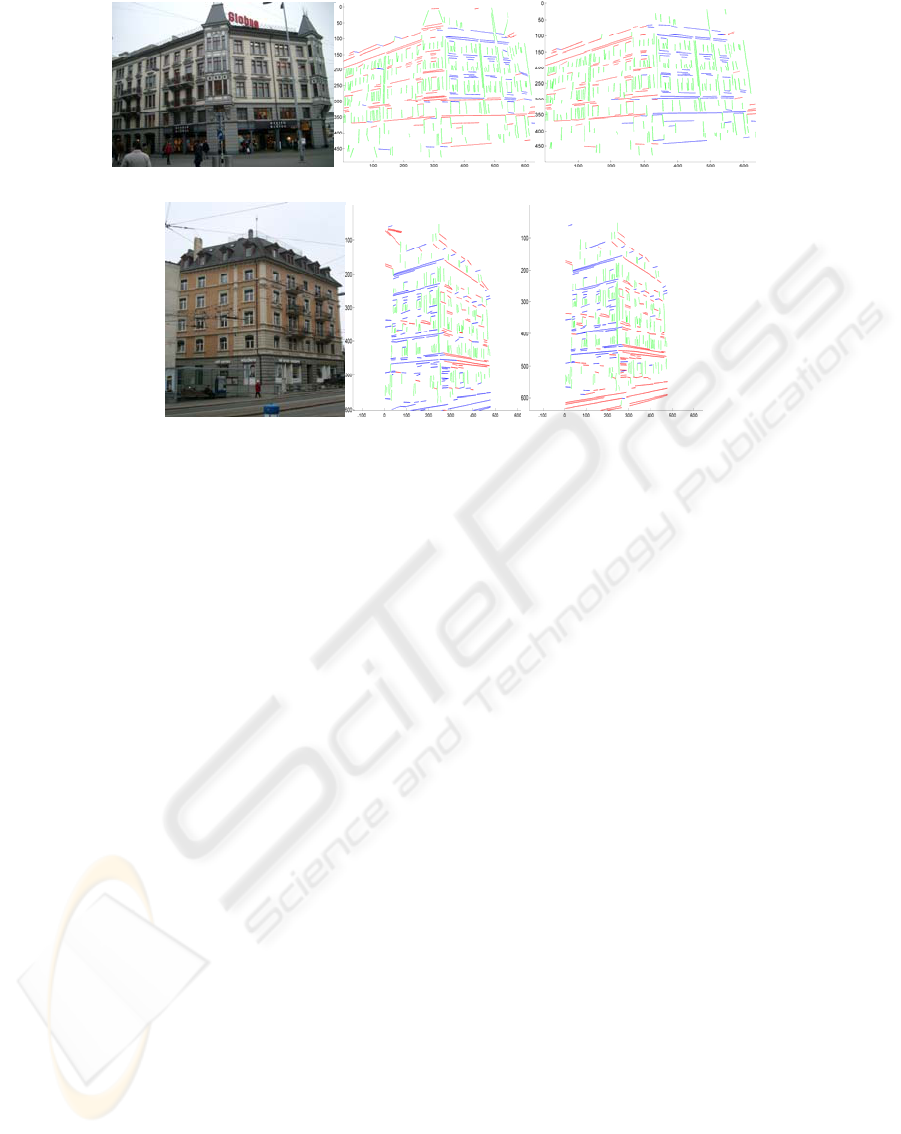
Figure 2: (a) Building with occlusion; (b) Detected and initially grouped two sets of lines for image (a); (c) Refined line
groups for (a); (d) Building with confusing line directions; (e) Two initial groups of lines for image (d) – left side of the
image contain lines that do not belong to the expected vanishing direction; (f) Refined line groups of (d).
The resultant three main groups are shown in Fig.
1(e) as separate colours.
For each group of line segments, we can now
compute their initial vanishing point. In Fig. 1(e),
each line segment is plotted by connecting their two
end points x
1
and x
2
. In a homogeneous form,
x
1
= (x
1
,y
1
,1) and x
2
= (x
2
,y
2
,1). Under the 2D
projective plane, the homogeneous line
representation is obtained by:
l = x
1
×x
2
(1)
As mentioned above, under perspective
transformations, parallel lines in the real-world
coordinate frame intersect at vanishing points in the
image plane. The two lines l
1
and l
2
intersect at the
point v = l
1
×l
2
. Alternatively, the relationship
between vanishing points and their associated lines
can be expressed as v
T
l = 0. However, with so many
pairs of lines available in each principal axis, we can
produce many differing vanishing points. This
requires us to solve the linear least square estimation
problem:
()
∑
=
n
i
T
i
v
vl
1
2
min
(2)
where n is the number of lines. This formula (2) can
be written as
min
v
||Av||
2
(3)
The rows of matrix A are the grouped lines with
the same vanishing direction.
Before solving the linear least square estimation
problem, we need to normalise the image end-point
coordinates since we are dealing with the case of an
uncalibrated camera. More detailed information of
normalisation can be found in Košecká and Zhang
(2002). The initial vanishing point for each group
was calculated by the closed form solution of (3),
where the estimation of v was the eigenvector
associated with the smallest eigenvalue of A
T
A. The
initial grouping of lines and estimated vanishing
points are accurate enough for the example image in
Fig. 1(a). However, for images with occlusions or
false groupings such as in Fig. 2(a) and (b), further
refinement is necessary. For example, Fig. 2(a)
shows a building with some occlusions. Its initial
grouped lines (as shown in Fig. 2(b)) causes large
errors in vanishing point detection. The building in
Fig. 2(d) also contains lines that do not belong to the
dominant vanishing directions but are still grouped.
2.2 Further Refinement of Vanishing
Points Locations based on EM
Algorithm
The refinement method is based on the Expectation
Maximisation (EM) algorithm. We first compute the
likelihood of line segments l
i
belonging to each of
the initially estimated vanishing points v
k
by the
formula:
()
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
∝
2
1
2
2
exp)|(
σ
k
T
i
ki
vl
vlp
(4)
AUTOMATIC APPROACH FOR RECTIFYING BUILDING FACADES FROM A SINGLE UNCALIBRATED IMAGE
39
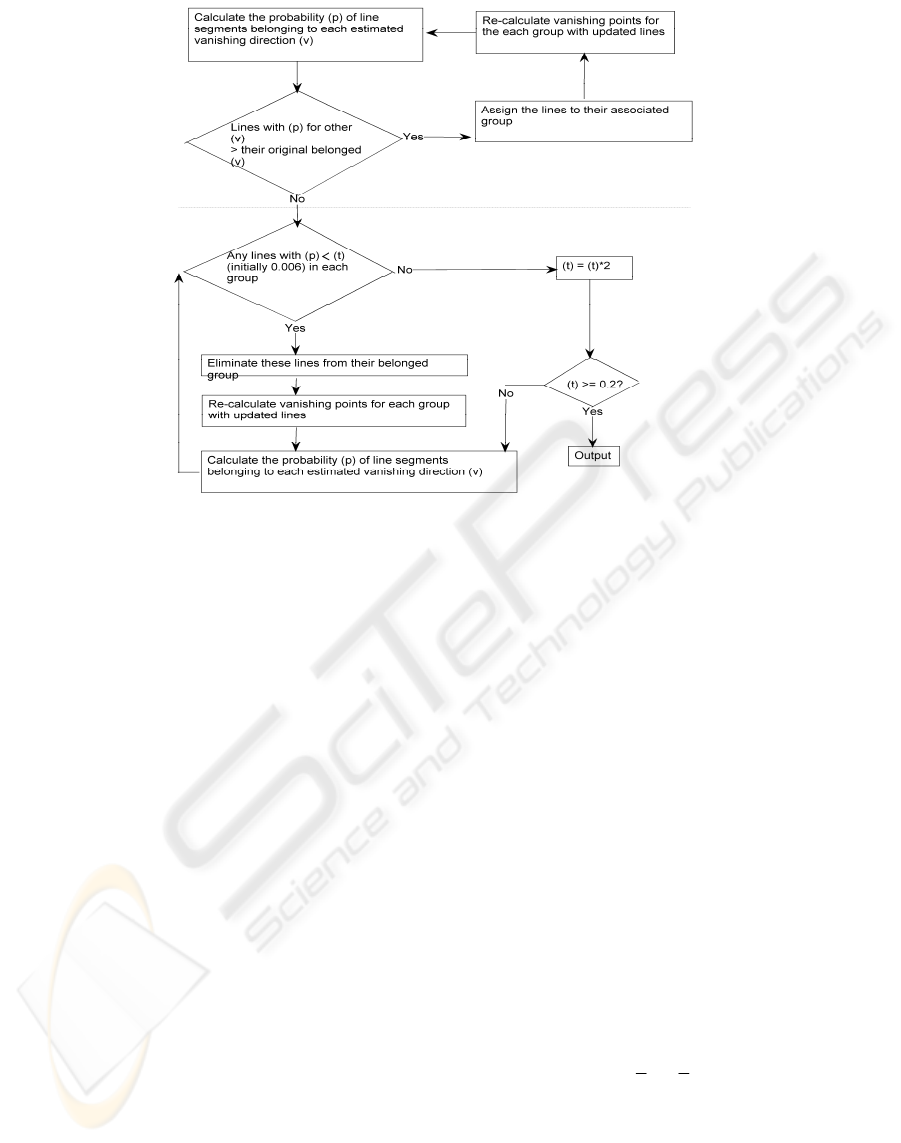
Figure 3: Flow chart of the refining process.
The upper half of the flow chart - Fig. 3 is
mainly used for re-grouping lines and combining
similar vanishing directions. The probabilities for
each line corresponded to every vanishing direction
were compared. The updated line groups were
passed to the lower half of the algorithm when no
lines are found to belong to other directions. The
lower half eliminates lines with low probability for
the direction they belong to so producing more
accurate estimates of vanishing point locations. The
iteration stops when line probabilities for each group
are all above 0.1. In our experiments, t = 0.1
normally is sufficient to give an accurate vanishing
point. The effect of this refining process for Fig. 2(a)
and (d) is shown in Fig.2(c) and (f).
2.3 Automatic Rectification of Main
Building Facades
To automatically warp an image’s main building
facades to the fronto-parallel view, we have to use
the geometric information provided by the image, no
external interaction should be required during the
processing. We followed the approach described by
Liebowitz and Zisserman (1998) as well as Hartley
and Zisserman (2003). Here, we briefly summarize
the method. The homography H which relates the
points x in the image plane to x’ (homogeneous
3-vector ) in the real-world plane can be
decomposed into three transformation matrices: H =
Similarity * Affine * Projective.
The first transformation is a pure projective
transformation obtained with the vanishing line of
the plane:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
321
010
001
lll
P
(5)
where l
1
, l
2
and l
3
are the vector elements of the
vanishing line l
∞
. Since the vanishing line is
computed by the two vanishing points from their
corresponding facade, the vanishing point
corresponds to the vertical lines of the building
normally need to be used twice. For images with
three vanishing points, we decided the vertical
vanishing point by exploiting the location of the
coordinates of all vanishing points with respect to
the image’s principal point.
The affine transformation which enables the
recovery of metric geometry is expressed as:
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
−
=
100
010
0
1
β
α
β
A
(6)
where α and β are the two parameters involved in the
transformation of circular points from the metric
plane to the affine plane. When the metric geometry
is restored it includes angles and length ratios of
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
40
(a) (b) (c)
(d) (e) (f)
Figure 4: (a) Building with facades not aligned with the three orthogonal axes; (b) Initial grouping for image (a); (c)
Refined line groups for (b); (d) Image taken from a critical viewpoint; (e) Plenty of lines grouped falsely; (f) Refined line
groups for (e).
non-parallel line segments. In order to determine α
and β, two constraints for non-parallel line sets must
be supplied. The constraints can be obtained from “a
known angle between lines; Equality of two
(unknown) angles; and a known length ratio”
(Liebowitz and Zisserman, 1998). Each constraint
produces a circle in the complex plane with α and β
indeed its real and imaginary components. The value
of α and β can be found at the intersection points of
two circles. However, for the problem of building
facade rectification, there is only one constraint that
the detected line segments provide with high
confidence — the right angle between the two sets
of lines. Therefore, the parameter β is assumed to be
1. This assumption is based on the fact that under
affine transformations, the circular points with
coordinates
()
T
i 0,,1 ± in the metric plane are
mapped to
()
T
i 0,1,
βα
m
. If no affine distortion
occurred, the value of α and β is (0, 1)
T
.
The last similarity transformation matrix is in the
form of:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
10
T
tsR
s and
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
θθ
θθ
cossin
sincos
R (7)
This final stage is used to: (i) adjust the image
centre so that no coordinates of the image points has
a negative value; (ii) rotate the line sets in order to
make sure the majority of the lines in each group are
aligned with the x and y axis directions; and (iii)
scale the image up or down if the warped image size
exceeds our desired value.
3 DISCUSSION
The approach proposed for building facade
rectification was tested on the buildings images from
the Zubud-Zurich buildings database (Shao and
Gool, 2003). The method managed to rectify 96% of
all the images tested. From this test, we found that
the key to properly warp the building facades lies in
the accuracy of the vanishing points and grouping of
real-world parallel lines. The proposed refinement
method was compared with Košecká and Zhang’s
(2002) work on vanishing points detection. Our
experiment shows following improvement in the
context of rectifying building images:
(1) Accuracy of Estimated Vanishing Points.
Instead of assigning probability weights to each line
for the Maximisation step described in [11], the lines
with very low probability to the vanishing point of
the associated group are eliminated or assigned to
other groups. Therefore, lines which could degrade
the estimate of vanishing point are reduced. From
our experiments, the average deviation of vanishing
points from its manually measured true position is
five pixels, (the true position was decided by using
AUTOMATIC APPROACH FOR RECTIFYING BUILDING FACADES FROM A SINGLE UNCALIBRATED IMAGE
41

Figure 5: Some example images with their associated warped facades.
Figure 6: Deviation errors from being parallel of the projective warped lines (for first three building examples in Fig.5) –
assessing vanishing point accuracy in each line set.
ruler to extend major building lines and locating the
intersection).
(2) Better Grouping of Lines. Buildings can have
facades which do not necessarily align with the three
orthogonal axes as shown in Fig. 4(a). Images of
buildings can also be taken from a critical viewpoint
where false initial groupings occur (Fig. 4(d)). The
problem of false grouping can also easily occur
when the vanishing points’ initial position is decided
by the intersection of lines with similar orientations.
The refinement method solved this by iteratively
adjusting the position of the vanishing points and
line groupings.
(3) Adaptable to Occlusion, Illumination and
Viewpoint Change. These factors need to be
considered when dealing with building images. Fig.
5 shows some of the rectified building facades using
the proposed method that have been successfully
adapted. At the rectification stage, the accuracy of
each vanishing point obtained with the final grouped
line segments in each vanishing direction set can be
also assessed by investigating parallel lines after
applying the projective transformation P. In theory,
the projective matrix P can recover the lines to
affinity. This means that the line direction in each
group should be the same. From the experiment, the
average deviation error was 1.8%. Fig. 6 shows the
plots of parallel deviation errors for the first three
building example of Fig. 5. In addition, instead of
directly applying computed projective, affine and
similarity transformations to the original image, the
three-stage transformations were only applied to
grouped line sets. After the final transformation,
three least-deviating (from parallel to x or y axis)
line segments were selected for final image
registration in order to reduce rectification distortion
introduced by lines with large deviation errors.
4 CONCLUSIONS
In conclusion, our approach for building facade
rectification is generally robust to occlusions,
different illuminations, wide changes in viewpoint
and different camera settings. The method could be
improved further by analysing the peaks detected at
the stage of curve fitting. For example, instead of
selecting the highest two or three peaks for grouping,
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
42

minor peaks could also be included. Groups with
similar initial estimates could be combined at the
refinement stage. This kind of improvement can also
enable rectification of a collection of buildings
appeared in a single image.
REFERENCES
Chen, Y & Ip, H, H, S 2005, ‘Planar metric rectification
by algebraically estimating the image of the absolute
conic’, In Proc IEEE conf. on Pattern Recognition, vol.
38, pp. 1117-1120.
David, P 2008, ‘Detection of building facades in urban
environments’, In Proc. SPIE conf. on Visual
Information Processing XV!!, vol. 6978, pp.
9780-9780.
Hartley, R, I 1999. ‘Theory and practice of projective
rectification’, International Journal of Computer
Vision, vol. 35, pp. 115-127.
Hu, J, Sawyer, J & Herve, J, Y 2006, ‘Building detection
and recognition for an automated tour guide’, In Proc.
IEEE Conf. on Systems, Man and Cybernetics, vol. 1,
pp. 283-289.
Košecká, J & Zhang, W 2002, ‘Video compass’, In
Computer Vision — ECCV, vol. 2353, pp. 29-32.
Košecká, J & Zhang, W 2005, ‘Extraction, matching, and
pose recovery based on dominant rectangular
structures’, Computer Vision and Image
Understanding, vol. 100, pp. 274-293.
Liebowitz, D & Zisserman, A 1998, ‘Metric rectification
for perspective images of planes’, In Proc. IEEE Conf.
on Computer Vision and Pattern Recognition, pp.
482-488.
Menudet, J, F, Becker, J, M, Fournel, T & Mennessier, C
2008, ‘Plane-based camera self-calibration by metric
rectification of images’, Image and Vision Computing,
vol. 26, pp. 913-934.
Robertson, D & Cipolla, R 2004. ‘An image-based system
for urban navigation’, In Proc. British Machine Vision
Conference.
Wang, G, Hu, Z, Wu, F & Tsui, H, T 2005, ‘Single view
metrology from scene constraints’, Image and Vision
Computing, vol. 23, pp. 831-840.
Kovesi, P 2000-2006,
http://www.csse.uwa.edu.au/~pk/research/matlabfns/
Shao, T, S, H & Gool, L, V (2003), ‘Zubud-zurich
buildings database for image based recognition’,
Technical report No. 260, Swiss Federal Institute of
Technology,
http://www.vision.ee.ethz.ch/showroom/zubud/
Hartley, R, & Zisserman, A 2003, Multiple View
Geometry in Computer Vision, Cambridge University
Press, Second Edition, Chapter 8.
AUTOMATIC APPROACH FOR RECTIFYING BUILDING FACADES FROM A SINGLE UNCALIBRATED IMAGE
43
